Important: หากต้องการติดตั้งชุดอุปกรณ์นี้ คุณต้องซื้อและติดตั้งชุดเสริมแขนบูมอัลตราโซนิกแยกด้วย
สั่งซื้อชุดเสริมแขนบูมอัลตราโซนิกต่อไปนี้มาใช้งานร่วมกับอุปกรณ์ของคุณ:
|
Multi Pro 1750—ชุดเสริม หมายเลขอะไหล่ 130-8227
|
|
Multi Pro 5800—ชุดเสริม หมายเลขอะไหล่
130-8229
|
|
Multi Pro WM—ชุดเสริม หมายเลขอะไหล่ 133-2808
|
Note: ดูด้านซ้ายและขวาของรถจากตำแหน่งปกติในการควบคุมรถ
การเตรียมอุปกรณ์
-
ทำความสะอาดภายนอกของอุปกรณ์และเครื่องฉีดพ่นสารเคมี
โปรดดูคู่มือผู้ใช้ของอุปกรณ์
-
เคลื่อนย้ายอุปกรณ์ไปยังพื้นราบ ดับเครื่องยนต์ ดึงเบรกมือ
และดึงกุญแจออก
ข้อควรระวัง
หากคุณเสียบกุญแจทิ้งไว้ อาจมีคนสตาร์ทเครื่องยนต์โดยไม่ตั้งใจและทำให้คุณหรือคนที่อยู่รอบข้างบาดเจ็บได้
ดึงกุญแจออกจากสวิตช์สตาร์ทก่อนติดตั้งชุดเครื่องมือ
-
ถอดสายไฟแบตเตอรี่ขั้วลบออกจากแบตเตอรี่ โปรดดูคู่มือผู้ใช้ของอุปกรณ์
การประกอบบานพับยึดเซนเซอร์
ชิ้นส่วนที่ต้องใช้สำหรับขั้นตอนนี้:
| บานพับ | 2 |
| แถบเหล็กงอ (อุปกรณ์ที่ไม่ได้ติดตั้งแขนบูมแบบปิดฝาครอบ) | 2 |
| แถบเหล็กงอ (อุปกรณ์ที่ติดตั้งแขนบูมแบบปิดฝาครอบ) | 2 |
| แถบเหล็กด้านบน | 2 |
| สปริงอัด | 4 |
| บุชชิ่ง | 8 |
| สลักเกลียว (5/16 x 3-1/4 นิ้ว) | 4 |
| แหวนเรียบ | 12 |
| น็อตล็อก (5/16 นิ้ว) | 4 |
Note: การประกอบอุปกรณ์ยึดเซนเซอร์นั้นต้องดูว่าได้ติดตั้งชุดแขนบูมแบบปิดฝาครอบ
(รุ่น 41602) หรือไม่
-
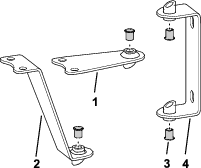
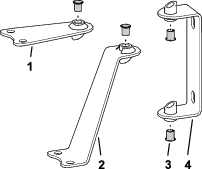
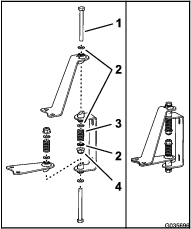
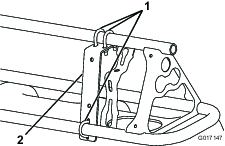
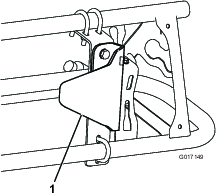
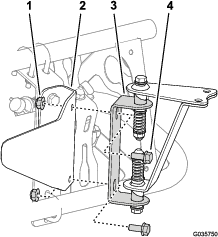
แยกบานพับและแถบเหล็กออกมาดังแสดงใน รูป 2 (สำหรับแขนบูมแบบไม่ปิดฝาครอบ)
หรือ รูป 3 (สำหรับแขนบูมแบบปิดฝาครอบ)
Note: ในชุดจะประกอบด้วยแถบเหล็กงอ 2 ชิ้น จำนวน 2 ชุด ชุดหนึ่งใช้สำหรับแขนบูมแบบไม่ปิดฝาครอบ
ส่วนอีกชุดหนึ่งใช้สำหรับแขนบูมแบบปิดฝาครอบ ดังนั้น จะมีแถบเหล็กงอ
2 ชิ้น จำนวน 1 ชุด (สำหรับแขนบูมแบบปิดฝาครอบหรือแขนบูมแบบไม่ปิดฝาครอบ)
ที่คุณไม่ได้ติดตั้งบนอุปกรณ์
Note: แถบเหล็กด้านบนสำหรับแขนบูมแบบไม่ปิดฝาครอบนำมาใช้เป็นแถบเหล็กด้านล่างของแขนบูมแบบปิดฝาครอบได้
-
สอดบุชชิ่งเข้าไปในท่อขนาดเล็กบนบานพับและแถบเหล็ก
ดังแสดงใน รูป 2 หรือ รูป 3
-
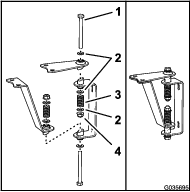
สวมแหวนเรียบบนสลักเกลียวแต่ละอัน ทั้ง 2 อัน (5/16
x 3 1/4 นิ้ว)
-
สอดสลักเกลียวผ่านท่อบนบานพับที่ติดตั้งเรียบร้อยแล้ว
บานพับ และแถบเหล็ก ดังแสดงใน รูป 4 หรือ รูป 5
-
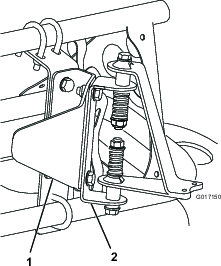
สวมแหวนเรียบบนปลายสลักเกลียวแต่ละอัน
(รูป 4 หรือ รูป 5)
-
สวมสปริงเข้ากับปลายสลักเกลียวแต่ละอัน (รูป 4 หรือ รูป 5)
-
ใส่แหวนเรียบและน็อตล็อกเข้ากับปลายสบักเกลียวแต่ละอัน
(รูป 4 หรือ รูป 5) แล้วขันน็อตล็อกจนกระทั่งสปริงแน่น
Note: บานพับจะต้องไม่แน่นจนเกินไป จนทำให้เซนเซอร์หมุนอย่างอิสระบนบานพับไม่ได้
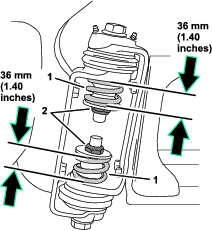
การปรับสปริงบานพับของแขนบูม
Important: การใช้งานระบบฉีดพ่นโดยที่สปริงของแขนบูมมีแรงอัดไม่ถูกต้องอาจทำให้ชุดแขนบูมเสียหายได้
ดังนั้นให้วัดความสูงของสปริง และใช้น็อตสวมทับอัดสปริงจนได้ความสูง
36 มม. (1.40 นิ้ว) ถ้าจำเป็น
หาผู้ช่วยมาคนหนึ่งหรือใช้อุปกรณ์ช่วยยกหนุนแขนบูมไว้ ขณะปรับความสูงของสปริงบนบานพับแขนบูม
-
ยืดแขนบูมด้านนอกให้อยู่ในตำแหน่งฉีดพ่น (แนวนอน)
-
หนุนแขนบูมขณะปรับความสูงของสปริง
-
ที่โครงยึดแกนหมุนและบานพับของแขนบูมด้านนอก
ให้ปรับน็อตสวมทับของสปริงด้านบนจนวัดความสูงของสปริงได้ 36 มม. (1.40
นิ้ว)
-
ปรับน็อตสวมทับของสปริงด้านล่างจนวัดความสูงของสปริงได้
36 มม. (1.40 นิ้ว)
-
ทำซ้ำขั้นตอนที่ 3 และ 4 สำหรับสปริงด้านบนและด้านล่างของแขนบูมด้านนอกอีกข้างหนึ่ง
-
วัดแรงอัดของสปริงด้านบนและด้านล่างที่บานพับแขนบูมในขณะที่แขนบูมอยู่ในตำแหน่งกางออก
(รูป 6)
-
อันสปริงทุกตัวจนวัดความสูงของสปริงได้ 36 มม. (1.40
นิ้ว)
-
ใช้น็อตสวมทับอัดสปริงทุกตัวจนวัดความสูงของสปริงได้มากกว่า
36 มม. (1.40 นิ้ว)
การปรับแขมบูม
Note: คุณต้องใช้บล็อกไม้ 2 ชิ้น ที่สูงประมาณ 10 ซม. (4 นิ้ว) สำหรับขั้นตอนนี้
แขนบูมถูกตั้งค่ามาจากโรงงานให้เลื่อนลงมาได้ไม่เกินตำแหน่งแนวนอน
หากต้องการให้ชุดแขนบูมอัลตราโซนิกรักษาระยะห่างระหว่างหัวฉีดกับพื้นให้เท่ากันตลอดเวลาเมื่อเนินลาดต่ำกว่าระดับของอุปกรณ์
คุณต้องปรับระบบรองรับแขนบูมให้แขนบูมสามารถเลื่อนลงมาต่ำกว่าตำแหน่งแนวนอน
เพื่อให้ระยะห่างระหว่างหัวฉีดกับพื้นยังคงเท่าเดิม
-
ยกแขนบูมขึ้นมาและพักแขนบูมในรางเคลื่อนย้าย
-
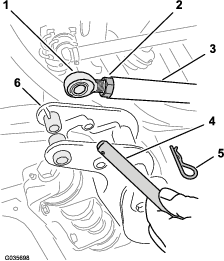
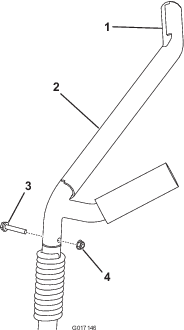
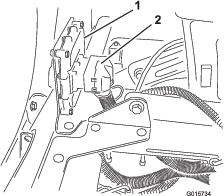
ที่โครงยึดแกนหมุนของส่วนแขนบูมด้านนอก
ให้ถอดปิ๊นตัวอาร์ที่ยึดปลายก้านกระบอกสูบยกเข้ากับโครงยึดแกนหมุน (รูป 7)
Note: เกลียวเปลือยบนปลายก้านกระบอกสูบจะต้องไม่ยาวกว่า 16 มม. (5/8
นิ้ว) เพื่อป้องกันไม่ให้เกลียวคลายออก และก้านหลุดออกมา
-
ลดระดับส่วนแขนบูมด้านนอกด้วยความระมัดระวังลงบนยังบล็อกไม้ที่มีความสูงประมาณ
10 ซม. (4 นิ้ว) ดังแสดงใน รูป 8
-
สตาร์ทอุปกรณ์และยืดกระบอกสูบยกออกจนสุด
-
คลายน็อตสวมทับที่ปลายก้านของกระบอกสูบยกแต่ละอัน (รูป 7)
-
ปรับปลายก้านของกระบอกสูบยกจนกระทั่งรูบนปลายก้านตรงกับรูบนโครงยึดแกนหมุนของส่วนแขนบูม
(รูป 7)
-
ที่โครงยึดแกนหมุนแต่ละด้าน ให้ยึดปลายก้านเข้ากับโครงยึดด้วยหมุดเคลวิสที่คุณถอดออกมาในขั้นตอนที่ 2
-
ยึดปิ๊นเสียบถ่างเข้ากับโครงยึดแกนหมุนโดยใช้ปิ๊นตัวอาร์
(รูป 7)
ที่คุณถอดออกมาในขั้นตอนที่ 2
-
ขันน็อตสวมทับบนก้านกระบอกสูบแต่ละอันจนกระทั่งแนบสนิท
(รูป 7)
การเปลี่ยนชุดควบคุมกระบอกสูบยก
ชิ้นส่วนที่ต้องใช้สำหรับขั้นตอนนี้:
| ส่วนชุดควบคุมไฮดรอลิก | 1 |
| ข้อต่อตรงไฮดรอลิก | 4 |
การประกอบชุดควบคุมการยกกระบอกสูบ
-
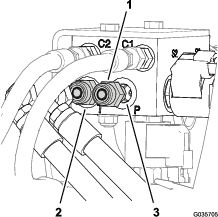
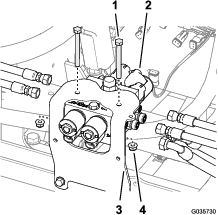
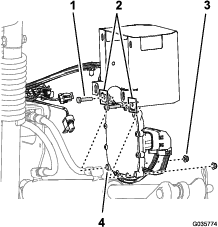
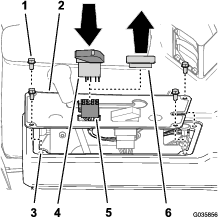
ที่ด้านหลังของเครื่องพ่นสารเคมี ให้ติดป้ายท่อของช่อง
P และช่อง T ของชุดควบคุมกระบอกสูบยก (รูป 9)
-
ถอดท่อออกจากข้อต่อตรงไฮดรอลิกที่ช่อง P และช่อง T ของชุดควบคุมกระบอกสูบยก
(รูป 9)
-
ถอดข้อต่อตรงไฮดรอลิกออกจากช่อง
P และช่อง T ของชุดควบคุมกระบอกสูบยกอันเก่า (รูป 9)
-
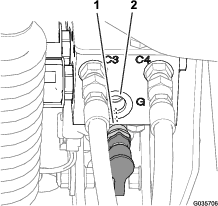
ถอดข้อต่อวินิจฉัยและฝาปิดออกจากช่อง
G ของชุดควบคุมกระบอกสูบยกอันเก่า (รูป 10)
-
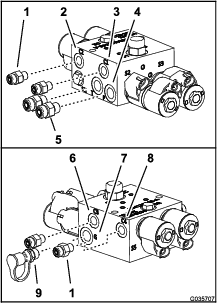
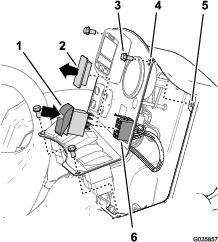
ที่ชุดควบคุมกระบอกสูบยก ให้ประกอบข้อต่อตรงไฮดรอลิก
(รูป 11)
ที่คุณถอดออกมาในขั้นตอนที่ 3 เข้ากับช่อง P และ T
-
ประกอบข้อต่อตรงไฮดรอลิก 4 อันจากชุดปรับระดับแขนบูมอัลตราโซนิกเข้ากับช่อง
C1, C2, C3 และ C4 เข้ากับชุดควบคุมกระบอกสูบยกอันใหม่ (รูป 11)
-
ประกอบข้อต่อวินิจฉัยและฝาปิดที่ถอดออกมาในขั้นตอนที่ 4 เข้ากับช่อง
G ของชุดควบคุมกระบอกสูบยกอันใหม่ (รูป 11)
การเปลี่ยนชุดควบคุมการยกกระบอกสูบ
-
ถอดฝาครอบออกจากชุดควบคุมกระบอกสูบยก ถ้ามีฝาครอบอยู่
-
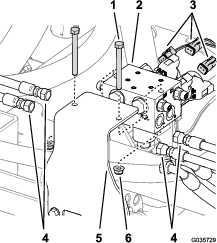
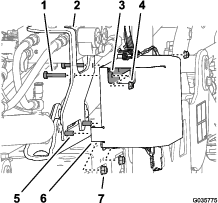
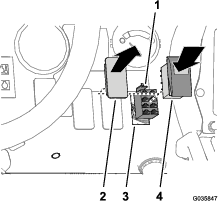
ติดป้ายท่อทั้งหมดที่ต่อเข้ากับชุดควบคุมกระบอกสูบยก
(ช่อง C1, C2, C3 และ C4) จากนั้นถอดท่อออกจากชุดควบคุมกระบอกสูบยก (รูป 12)
-
ถอดขั้วต่อชุดสายไฟด้านหลังออกจากโซเลนอยด์ของชุดควบคุมกระบอกสูบยก
(รูป 12)
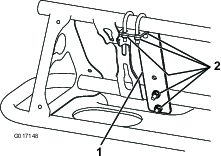
-
ถอดชุดควบคุมกระบอกสูบยกออกจากโครงยึดโดยการถอดสลักเกลียว
2 ตัว และน็อตล็อก 2 ตัวออกมา (รูป 12)
Note: เก็บสลักเกลียว 2 ตัว และน็อตล็อก 2 ตัวเอาไว้ก่อน
-
เปลี่ยนโครงยึดชุดควบคุมกระบอกสูบ โปรดดูคำแนะนำการติดตั้งชุดเสริมแขนบูมอัลตราโซนิก
-
รุ่น Multi Pro 1750—ชุดเสริม
หมายเลขอะไหล่ 130-8227
-
รุ่น Multi Pro 5800—ชุดเสริม
หมายเลขอะไหล่ 130-8229
-
รุ่น Multi Pro WM—ชุดเสริม
หมายเลขอะไหล่ 133-2808
-
ติดตั้งชุดควบคุมกระบอกสูบชุดใหม่บนโครงยึด โดยใช้สลักเกลียว
2 ตัวและน็อตล็อก 2 ตัวที่ถอดออกมาในขั้นตอนที่ 4
-
ต่อท่อทั้งหมดเข้ากับข้อต่อของชุดควบคุมกระบอกสูบตามขั้นตอนต่อไปนี้
-
ท่อของถังไฮดรอลิก (3/8 นิ้ว) ที่ต่อมาจากตัวกรองขากลับต้องต่อเข้ากับช่อง
“T”
-
ท่อแรงดัน (3/8 นิ้ว) ต้องต่อเข้ากับช่อง “P”
-
ท่อ (1/4 นิ้ว) ที่ต่อมาจากช่องขยายของกระบอกสูบยกแขนบูมต้องต่อเข้ากับช่อง
C1 และ C3 บนชุดควบคุมกระบอกสูบยก
-
ท่อ (1/4 นิ้ว) ที่ต่อมาจากช่องหดกลับของกระบอกสูบยกแขนบูมต้องต่อเข้ากับช่อง
C2 และ C4 บนชุดควบคุมกระบอกสูบยก
Important: ตรวจสอบให้แน่ใจว่าคุณต่อท่อทั้งหมดถูกต้อง
-
ไล่อากาศในระบบไฮดรอลิก โปรดดูคู่มือผู้ใช้
Note: คุณต้องต่อชุดสายไฟจากชุดแขนอัลตราโซนิกข้ากับโซเลนอยด์ของชุดควบคุมกระบอกสูบยกใน การต่อชุดสายไฟที่ชุดควบคุมการยกแขนบูม
การเปลี่ยนแขนรองรับแขนบูม
ชิ้นส่วนที่ต้องใช้สำหรับขั้นตอนนี้:
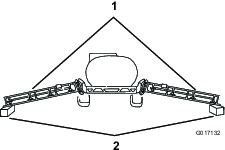
แขนรองรับแขนบูมอันใหม่ช่วยให้คุณพับแขนบูมขึ้นโดยที่แขนบูมแต่ละด้านไม่สัมผัสกัน
ป้องกันไม่ให้เซนเซอร์ที่อยู่บนแขนบูมเสียหาย
-
ถอดแขนรองรับแขนบูมทั้ง 2 อันออก โดยถอดสลักเกลียวและน็อตออก
(รูป 14)
Note: เก็บสลักเกลียวและน็อตเอาไว้ก่อน เพื่อใช้ติดตั้งแขนรองรับแขนบูมอันใหม่
-
ติดตั้งแขนรองรับแขนบูมอันใหม่ทีละอัน โดยยึดด้วยสลักเกลียวและน็อตที่ถอดออกมาก่อนหน้านี้
การติดตั้งเซนเซอร์แขนบูมโซนิก
ชิ้นส่วนที่ต้องใช้สำหรับขั้นตอนนี้:
| เซนเซอร์แขนบูมโซนิก | 2 |
| โครงยึด | 2 |
| ปลั๊กตั้งโปรแกรม | 2 |
| ฝาครอบเซนเซอร์ | 2 |
| กระปุกเซนเซอร์ส่วนล่าง | 2 |
| ท่อลดแรงดัน | 2 |
| โครงยึดแผงครอบเซนเซอร์ | 2 |
| สายเคเบิลเซนเซอร์ (4 ม.) | 2 |
| น็อตตัวใหญ่ | 4 |
| สลักเกลียวรูปตัว U | 6 |
| น็อตล็อค (1/4 นิ้ว) | 8 |
| สลักเกลียว (5/16 x 3/4 นิ้ว) | 8 |
| สลักเกลียว (5/16 x 1 1/4 นิ้ว) | 4 |
| น็อตล็อก (5/16 นิ้ว) | 12 |
| สายรัด | 12 |
การติดตั้งส่วนยึดเซนเซอร์
-
ติดตั้งโครงยึดที่ด้านหน้าของแขนบูมแต่ละฝั่ง
ใกล้กับหัวฉีดด้านนอกสุด (รูป 15 และ รูป 16) ด้วยสลักเกลียวรูปตัว U 3
ตัว และน็อตล็อก (1/4 นิ้ว) 6 ตัว
-
ติดตั้งโครงยึดแผงครอบเซนเซอร์เข้ากับโครงยึด โดยใช้สลักเกลียว
(5/16 x 3/4 นิ้ว) 2 ตัว และน็อตมีบ่า (5/16 นิ้ว) 2 ตัว ดังแสดงใน รูป 17
-
ติดตั้งอุปกรณ์ยึดเซนเซอร์เข้ากับโครงยึดแผงครอบเซนเซอร์
โดยใช้สลักเกลียว (5/16 x 3/4 นิ้ว) 2 ตัวและน็อตล็อก (5/16 นิ้ว) 2
ตัว ดังแสดงใน รูป 18 (สำหรับแขนบูมแบบไม่ปิดฝาครอบ) หรือ รูป 19 (สำหรับแขนบูมแบบปิดฝาครอบ)
-
ทำซ้ำขั้นตอน 1 ถึง 3 สำหรับส่วนแขนบูมด้านนอกอีกฝั่งหนึ่งของอุปกรณ์
การติดตั้งเซนเซอร์
Note: สำหรับการติดตั้งฝากันฝุ่น โปรดดู ก่อนจัดเก็บ
-
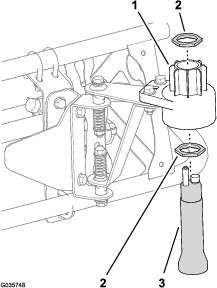
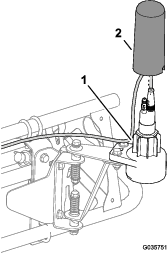
ติดตั้งกระปุกเซนเซอร์ส่วนล่างเข้ากับอุปกรณ์ยึดเซนเซอร์
(รูป 20)
โดยใช้สลักเกลียว (5/16 x 1 1/4 นิ้ว) 2 ตัว และน็อตล็อก (5/16 นิ้ว)
2 ตัว
-
ติดตั้งเซนเซอร์ตามขั้นตอนต่อไปนี้
-
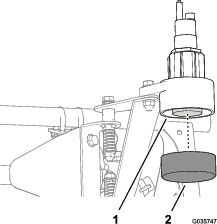
ประกอบน็อตตัวใหญ่เข้ากับเซนเซอร์ (รูป 21)
-
สอดเซนเซอร์เข้าไปในกระปุกเซนเซอร์ส่วนล่าง (รูป 21)
-
ปรับน็อตจนกระทั่งเซนเซอร์แนบกับก้นกระปุกส่วนล่าง
-
ประกอบน็อตตัวใหญ่อีกตัวหนึ่งเข้ากับเซนเซอร์ (รูป 21)
-
ขันน็อตจนได้แรงบิด 18 ถึง 22 นิวตันเมตร (13 ถึง 16
ฟุตปอนด์)
Note: ไม่ต้องใช้แหวนล็อกที่ให้มาพร้อมกับเซนเซอร์ ให้ทิ้งไป
-
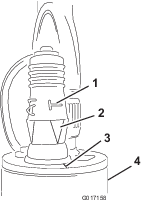
เสียบปลั๊กตั้งโปรแกรมเข้ากับเซนเซอร์
(รูป 22)
Important: ตรวจดูให้แน่ใจว่าลูกศรใต้ตัว “T” แนวนอน ตรงกับร่องบนขอบด้านบนของเซนเซอร์
(รูป 22)
-
ทำซ้ำขั้นตอน 1 ถึง 3 สำหรับส่วนแขนบูมด้านนอกอีกฝั่งหนึ่งของอุปกรณ์
การติดตั้งชุดสายไฟและกระปุกส่วนบน
-
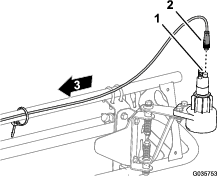
ต่อขั้วต่อกลมตัวเมีย 4 รูของชุดสายไฟเซนเซอร์เข้ากับขั้วต่อ
4 ขาของเซนเซอร์ (รูป 23)
-
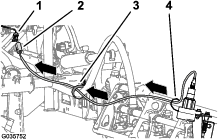
เดินชุดสายไฟตามแนวด้านหน้าของส่วนแขนบูมด้านนอก ผ่านข้อรัด
ไปจนถึงขั้วต่อตัวเมีย 4 รูของชุดสายไฟจากชุดเสริมแขนบูมอัลตราโซนิก
ซึ่งอยู่ด้านหน้าของชุดควบคุมกระบอกสูบยก (รูป 24)
-
ต่อขั้วต่อ 4 ขาของชุดสายไฟเซนเซอร์ด้านซ้ายและด้านขวาเข้ากับขั้วต่อตัวเมีย
4 รูของชุดสายไฟสำหรับชุดเสริมแขนบูมอัลตราโซนิก (รูป 24) ที่ติดป้ายว่า เซนเซอร์โซนิกด้านซ้าย และ เซนเซอร์โซนิกด้านขวา
-
ติดตั้งกระปุกเซนเซอร์ส่วนบนไว้เหนือเซนเซอร์ และบนกระปุกเซนเซอร์ส่วนล่าง
(รูป 25)
Note: สายไฟของเซนเซอร์จะต้องลอดผ่านช่องเล็กๆ บนฝาครอบ ก่อนจะเข้าไปอยู่ในกระปุกส่วนบน
-
ใช้สายรัดยึดสายไฟจากเซนเซอร์เข้ากับแขนบูม
(รูป 24)
Important: เหลือช่องว่างระหว่างสายไฟกับเซนเซอร์ไว้บางส่วน เพื่อให้เซนเซอร์สามารถหมุนได้อย่างอิสระบนบานพับ
โดยไม่ดึงรั้งสายไฟ
-
ทำซ้ำขั้นตอน 1 ถึง 5 สำหรับส่วนแขนบูมด้านนอกอีกฝั่งหนึ่งของอุปกรณ์
Note: สำหรับแขนบูมแบบปิดฝาครอบเท่านั้น: เซนเซอร์จะต้องไม่ตรวจจับฝาครอบแขนบูม
เพราะอาจจะรบกวนสัญญาณได้ หากคุณพบปัญหาระหว่างการปรับเทียบ ให้เช็คเซนเซอร์
โดยดูให้แน่ใจว่าสัญญาณของเซนเซอร์ไม่ตรวจจับฝาครอบแขนบูม
การต่อชุดสายไฟที่ชุดควบคุมการยกแขนบูม
-
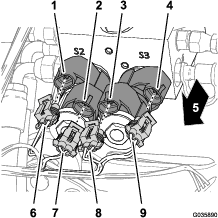
ที่ด้านหน้าของชุดควบคุมกระบอกสูบยก ให้ต่อขั้วต่อไฟฟ้า
4 ตัวของชุดสายไฟแขนบูมโซนิกเข้ากับโซเลนอยด์ควบคุมการยกแขนบูม ดังแสดงใน รูป 26
-
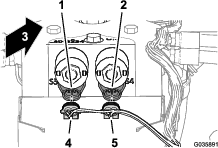
ที่ด้านหลังของชุดควบคุมกระบอกสูบยก ให้ต่อขั้วต่อไฟฟ้า
2 ตัวของชุดสายไฟแขนบูมโซนิกเข้ากับโซเลนอยด์ควบคุมการเปิดใช้งานของแขนบูมโซนิก
ดังแสดงใน รูป 27
การติดตั้งส่วนควบคุมระบบไฟฟ้า
ชิ้นส่วนที่ต้องใช้สำหรับขั้นตอนนี้:
| ส่วนควบคุมระบบไฟฟ้า | 1 |
| สลักเกลียว (1/4 x 1 1/8 นิ้ว) | 4 |
| น็อตล็อก (¼ นิ้ว.) | 4 |
การต่อชุดสายไฟเข้ากับส่วนควบคุมระบบไฟฟ้า
Multi Pro 1750 และ Multi Pro WM
-
เดินชุดสายไฟของแขนบูมโซนิกไปยังชุดควบคุมไฮดรอลิก
-
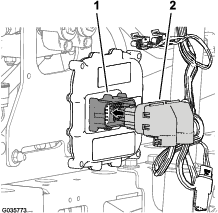
ต่อขั้วต่อตัวเมีย 50 รูของชุดสายไฟแขนบูมโซนิกเข้ากับขั้วต่อ
50 ขาของส่วนควบคุมระบบไฟฟ้า แล้วยึดด้วยสกรูหัวจม (รูป 28)
Note: นี่คือการเชื่อมต่อทางไฟฟ้าของส่วนควบคุมและเชื่อมต่อได้แค่วิธีเดียวเท่านั้น
-
ขันสกรูหัวจมได้แรงบิด 2.7 ถึง 3.2 นิวตันเมตร (24 ถึง
28 นิ้วปอนด์)
การติดตั้งส่วนควบคุมเข้ากับอุปกรณ์
Multi Pro 1750 และ Multi Pro WM
-
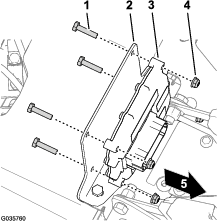
วางส่วนควบคุมระบบไฟฟ้าให้ตรงกับด้านในของฝาครอบส่วนควบคุม
โดยให้รูยึดด้านล่างข้างนอกส่วนควบคุมตรงกับรูบนหน้าแปลนด้านหลัง บริเวณด้านล่างฝาครอบ
(รูป 29)
-
ประกอบส่วนควบคุมเข้ากับฝาครอบ โดยใช้สลักเกลียว (1
1/8 นิ้ว) 2 ตัว และน็อตมีบ่า (1/4 นิ้ว) 2 ตัว ดังแสดงใน รูป 29
-
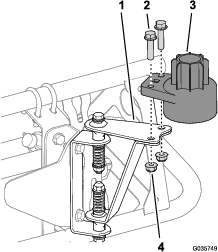
ถอดน็อตมีบ่า (5/16 นิ้ว) 2 ตัว
ที่ทำหน้าที่ยึดโครงยึดของชุดเสริมแขนบูมอัลตราโซนิกจากส่วนยึดกระบอกสูบ
(รูป 30)
Note: ไม่ต้องถอดโครงยึดออกจากส่วนยึดกระบอกสูบ
-
ประกอบฝาครอบส่วนควบคุม (รูป 30) เข้ากับสลักเกลียวติดจาน (5/16 x 1 นิ้ว)
ที่รูด้านหน้า บริเวณด้านล่างฝาครอบ โดยยึดฝาครอบ โครงยึด และส่วนยึดเอาไว้หลวมๆ
ด้วยน็อตมีบ่า (5/16 นิ้ว) 2 ตัวที่ถอดออกมาในขั้นตอนที่ 3
-
ประกอบสลักเกลียว (1/4 x 1 3/8 นิ้ว) 2 ตัว ลอดผ่านรูบนโครงยึด
(ชุดเสริมแขนบูมอัลตราโซนิก) หน้าแปลนด้านหลัง (ฝาครอบส่วนควบคุม) และส่วนควบคุม
(รูป 30)
โดยใช้น็อตมีบ่า (1/4 นิ้ว) 2 ตัว
-
ขันสลักเกลียวติดจาน 5/16 นิ้ว และน็อตมีบ่า จนได้แรงบิด
1,978 ถึง 1,243 นิวตันเซนติเมตร (175 ถึง 225 นิ้วปอนด์)
-
ขันสลักเกลียวติดจาน 1/4 นิ้ว และน็อตมีบ่า จนได้แรงบิด
1,017 ถึง 2,542 นิวตันเซนติเมตร (90 ถึง 110 นิ้วปอนด์)
การติดตั้งส่วนควบคุมเข้ากับอุปกรณ์
อุปกรณ์ Multi Pro 5800
-
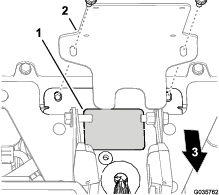
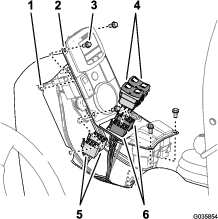
หมุนที่นั่งคนขับและผู้โดยสารไปด้านหน้า และล็อกตำแหน่งด้วยก้านยึด
-
สำหรับอุปกรณ์รุ่นปี 2015
และเก่ากว่านั้น ให้มองหาจุดปิดที่อยู่ระหว่างเข็มขัดนิรภัยของที่นั่งคนขับและผู้โดยสารฝั่งด้านใน
แล้วถอดจุกปิดออกจากฐานคอนโซล (รูป 32)
-
ประกอบส่วนควบคุมระบบไฟฟ้าเข้ากับโครงยึด (รูป 32) โดยใช้สลักเกลียว
(1/4 x 1 1/8 นิ้ว) 4 ตัว และน็อตล็อก (1/4 นิ้ว) 4 ตัว
-
ขันน็อตและสลักเกลียวจนได้แรงบิด 1,017 ถึง 1,243 นิวตันเซนติเมตร
(90 ถึง 110 นิ้วปอนด์)
การต่อชุดสายไฟเข้ากับส่วนควบคุมระบบไฟฟ้า
อุปกรณ์ Multi Pro 5800
-
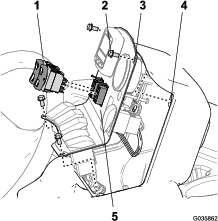
ต่อขั้วต่อตัวเมีย 50 รูของชุดสายไฟแขนบูมโซนิกตามขั้นตอนต่อไปนี้
-
สำหรับอุปกรณ์รุ่นปี 2015 และเก่ากว่านั้น ให้เดินชุดสายไฟที่มีขั้วต่อตัวเมีย 50 รู ลอดผ่านช่องบนฐานคอลโซลที่คุณทำไว้ในขั้นตอนที่ 2 โปรดดูคำแนะนำการติดตั้งสำหรับชุดเสริมแขนบูมอัลตราโซนิก
-
สำหรับอุปกรณ์รุ่นปี 2015 ขึ้นไป ให้เดินชุดสายไฟที่มีขั้วต่อตัวเมีย 50 รู ลอดผ่านห่วงขนาดใหญ่บนฐานคอลโซล
โปรดดูคำแนะนำการติดตั้งสำหรับชุดเสริมแขนบูมอัลตราโซนิก
-
ต่อขั้วต่อตัวเมีย 50 รูของชุดสายไฟแขนบูมโซนิกเข้ากับขั้วต่อ
50 ขาของส่วนควบคุมระบบไฟฟ้า แล้วยึดด้วยสกรูหัวจม (รูป 33)
Note: นี่คือการเชื่อมต่อทางไฟฟ้าของส่วนควบคุมและเชื่อมต่อได้แค่วิธีเดียวเท่านั้น
-
ขันสกรูหัวจมได้แรงบิด 2.7 ถึง 3.2 นิวตันเมตร (24 ถึง
28 นิ้วปอนด์)
การต่อชุดสายไฟและสวิตช์
ชิ้นส่วนที่ต้องใช้สำหรับขั้นตอนนี้:
| สวิตช์กระดก (ไฟสว่าง) | 1 |
| สายรัด | 12 |
การติดตั้งสวิตช์โหมดอัลตราโซนิก
อุปกรณ์ Multi Pro 1750
-
ถ้ามีติดตั้งอยู่ ให้ถอดสลักเกลียวหน้าแปลน
(1/4 x 1/2 นิ้ว) 4 ตัวที่ทำหน้าที่ยึดแผงฝาครอบเข้ากับด้านบนของคอนโซล
ดังแสดงใน รูป 34
-
ถอดจุกสวิตช์ออกจากแผงฝาครอบบนคอนโซล (รูป 34)
-
สอดขั้วต่อตัวเมีย 8 รูของชุดสายไฟชุดเสริมแขนบูมอัลตราโซนิกผ่านช่องบนแผงฝาครอบ
(รูป 34)
-
ต่อขั้วต่อตัวเมีย 8 รูของชุดสายไฟชุดเสริมแขนบูมอัลตราโซนิกที่ติดป้ายว่า โหมดโซนิก แมนวลกับอัตโนมัติ เข้ากับสวิตช์กระดก (รูป 34)
-
สอดสวิตช์กระดกเข้าไปในช่องแผงหน้าปัด จนกระทั่งสวิตช์ล็อกเข้าที่
(รูป 34)
-
วางตำแหน่งให้รูบนแผงฝาครอบตรงกับรูที่ด้านบนของคอนโซล
(รูป 34)
-
ยึดแผงฝาครอบเข้ากับคอนโซล โดยใช้สลักเกลียว (รูป 34) ที่ถอดออกมาในขั้นตอนที่ 1
การติดตั้งสวิตช์โหมดอัลตราโซนิก
อุปกรณ์ Multi Pro 5800
-
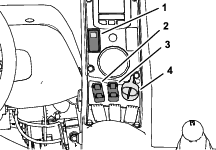
ถอดจุกสวิตช์บนแผงหน้าปัดตามตำแหน่งที่แสดงใน รูป 35
-
ต่อขั้วต่อตัวเมีย 8 รูของชุดสายไฟชุดเสริมแขนบูมอัลตราโซนิกที่ติดป้ายว่า โหมดโซนิก แมนวลกับอัตโนมัติ เข้ากับสวิตช์กระดก (รูป 35)
-
สอดสวิตช์กระดกเข้าไปในช่องแผงหน้าปัด จนกระทั่งสวิตช์ล็อกเข้าที่
(รูป 35)
Note: วางสวิตช์ โดยให้ส่วนหางอยู่ด้านล่าง
การติดตั้งสวิตช์โหมดอัลตราโซนิก
อุปกรณ์ Multi Pro WM
-
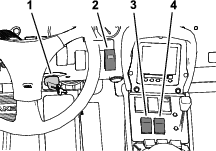
ถ้ามีติดตั้งอยู่ ให้ถอดสลักเกลียวมีบ่า
(1/4 x 1/2 นิ้ว) 4 ตัวที่ทำหน้าที่ยึดแผงควบคุมเข้ากับคอนโซล ดังแสดงใน รูป 36
-
ถอดจุกสวิตช์ออกจากแผงควบคุมบนคอนโซล (รูป 36)
-
สอดขั้วต่อตัวเมีย 8 รูของชุดสายไฟชุดเสริมแขนบูมอัลตราโซนิกผ่านช่องบนแผงควบคุม
(รูป 36)
-
ต่อขั้วต่อตัวเมีย 8 รูของชุดสายไฟชุดเสริมแขนบูมอัลตราโซนิกที่ติดป้ายว่า โหมดโซนิก แมนวลกับอัตโนมัติ เข้ากับสวิตช์กระดก (รูป 36)
-
สอดสวิตช์กระดกเข้าไปในช่องแผงควบคุม จนกระทั่งสวิตช์ล็อกเข้าที่
(รูป 36)
Note: วางสวิตช์ โดยให้ส่วนหางอยู่ด้านล่าง
-
วางตำแหน่งให้รูบนแผงควบคุมตรงกับรูที่ด้านบนของคอนโซล
(รูป 36)
-
ยึดแผงฝาครอบเข้ากับคอนโซล โดยใช้สลักเกลียว (รูป 36) ที่ถอดออกมาในขั้นตอนที่ 1
การต่อสวิตช์ยกแขนบูมเข้ากับชุดสายไฟแขนบูมโซนิก
การต่อสวิตช์เข้ากับชุดสายไฟ
Multi Pro 1750 หรือ Multi Pro WM
-
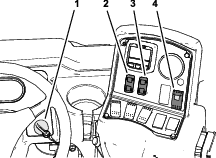
ถอดสลักเกลียวหน้าแปลน (1/4 x 1/2 นิ้ว)
4 ตัวที่ยึดแผงสวิตช์เข้ากับคอนโซลกลางออก และยกแผงสวิตช์ขึ้น (รูป 37 หรือ รูป 28)
-
ถอดขั้วต่ำ 8 รูของชุดสายไฟอุปกรณ์ออกจากสวิตช์ยกแขนบูม
(รูป 37 หรือ รูป 38)
Note: หากต้องการเพิ่มระยะห่าง ให้ถอดสวิตช์ยกแขนบูมออกจากแผงสวิตช์
-
ต่อสวิตช์กระดกเข้ากับขั้วต่อตัวเมีย 8 รูของชุดสายไฟสำหรับชุดเสริมแขนบูมอัลตราโซนิก
(รูป 37 หรือ รูป 38)
Note: ตรวจดูว่าขั้วต่อของชุดสายไฟแขนบูมโซนิกที่ติดป้ายว่า สวิตช์แอคชูเอเตอร์ด้านซ้าย ตรงกับช่องสวิตช์ด้านซ้ายบนแผงสวิตช์
-
หากคุณถอดสวิตช์ออกมาจากแผงสวิตช์ ให้สอดสวิตช์ยกแขนบูมเข้าไปในช่องบนแผงคอนโซลตรงกลาง
จนกระทั่งสวิตช์เข้าที่
-
จัดตำแหน่งของรูบนแผงสวิตช์ให้ตรงกับช่องบนคอนโซล (รูป 37 หรือ รูป 38)
-
ยึดฝาครอบด้านข้างบนคอนโซลกลางด้วยสลักเกลียวหน้าแปลน
(1/4 x 1/2 นิ้ว) 4 ตัว (รูป 37 หรือ รูป 38) ที่ถอดออกมาในขั้นตอนที่ 1
การต่อสวิตช์เข้ากับชุดสายไฟ
อุปกรณ์ Multi Pro 5800
-
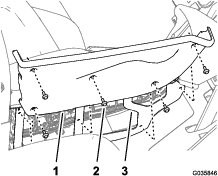
ถอดสลักเกลียวหน้าแปลน (1/4 x 3/4 นิ้ว)
5 ตัวที่ยึดฝาครอบด้านขวาเข้ากับคอนโซลกลาง (รูป 39) ออก
-
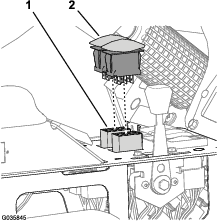
ถอดสวิตช์กระดกสำหรับส่วนควบคุมการยกแขนบูมซ้ายและขวาออกจากแผงคอนโซลกลาง
(รูป 39)
-
ถอดขั้วต่อตัวเมีย 8 รูของชุดสายไฟอุปกรณ์ออกจากสวิตช์ยกแขนบูมสำหรับวงจรควบคุมการยกแขนบูมด้านซ้ายและขวา
(รูป 40)
Note: เก็บขั้วต่อของชุดสายไฟอุปกรณ์ไว้ด้วยกันกับชุดสายไฟ
-
ต่อสวิตช์กระดกเข้ากับขั้วต่อตัวเมีย 8 รูของชุดสายไฟสำหรับชุดเสริมแขนบูมอัลตราโซนิก
(รูป 40)
Note: ตรวจดูว่าขั้วต่อของชุดสายไฟแขนบูมโซนิกที่ติดป้ายว่า สวิตช์แอคชูเอเตอร์ด้านซ้าย ตรงกับช่องบนแผงคอนโซลกลาง
-
สอดสวิตช์ยกแขนบูมเข้าไปในช่องบนแผงคอนโซลกลางจนกระทั่งสวิตช์ล็อกเข้าที่
(รูป 40)
-
จัดตำแหน่งให้รูบนฝาครอบด้านขวาตรงกับโครงของคอนโซลกลาง
(รูป 39)
-
ยึดฝาครอบด้านข้างบนคอนโซลกลาง (รูป 39) ด้วยสลักเกลียวหน้าแปลน (1/4
x 3/4 นิ้ว) 5 ตัว ที่ถอดออกมาในขั้นตอนที่ 1
ขั้นตอนสุดท้ายในการติดตั้งชุดปรับระดับแขนบูมอัลตราโซนิก
-
ต่อสายไฟแบตเตอรี่ขั้วลบเข้ากับแบตเตอรี่ โปรดดูคู่มือผู้ใช้ของอุปกรณ์
-
สำหรับอุปกรณ์รุ่น Multi Pro 1750 และ Multi Pro 5800
ให้หมุนเบาะนั่งลง
การปรับเทียบแขนบูมโซนิก
หลังจากสั่งให้ตัวประมวลผลของส่วนควบคุมทำการปรับเทียบ คุณจะมีเวลา
20 วินาทีในการปรับเทียบเซนเซอร์บนแขนบูม ระยะห่างระหว่างเซนเซอร์บนแขนบูมแต่ละฝั่งกับพื้นดินที่คุณตั้งค่าหลังจากระยะเวลาปรับเทียบ
20 วินาที คือค่าความสูงของแขนบูมในโหมดอัตโนมัติ จนกว่าคุณจะทำการปรับเทียบเซนเซอร์ใหม่อีกครั้ง
Note: สำหรับแขนบูมแบบไม่ปิดฝาครอบ: ค่าความสูงเริ่มต้นจากหัวฉีดถึงพื้นดินคือ
51 ซม. (20 นิ้ว) ในกรณีที่คุณตั้งค่าความสูงของแขนบูมต่างจากค่าเริ่มต้นจากโรงงาน
หากต้องการคืนค่าการปรับเทียบกลับมาเป็นค่าเริ่มต้นจากโรงงาน ให้คุณปรับเทียบแขนบูมโดยให้แขนบูมอยู่ในราง สำหรับแขนบูมแบบปิดฝาครอบ: ค่าความสูงเริ่มต้นคือ 51 ซม.
(20 นิ้ว) สำหรับแขนบูมแบบปิดฝาครอบเท่านั้น คุณต้องปรับเทียบเซนเซอร์บนแขนบูมแบบปิดฝาครอบ
-
เครื่องพ่นสารเคมีในสนามต้องจอดอยู่ห่างจากต้นไม้ อาคาร
ยานพาหนะ เศษสิ่งสกปรก และระบบสาธารณูปโภคใต้ดินและระบบประปา
-
ลดแขนบูมลงมาในตำแหน่งแนวนอน
-
ปิดกุญแจสตาร์ท
-
กดสวิตช์แขนบูมโซนิกไปยังตำแหน่ง เปิด (รูป 41, รูป 42 หรือ รูป 43)
-
กดสวิตช์ควบคุมการยกแขนบูมด้านซ้ายค้างไว้ไปยังตำแหน่งยกลง และกดสวิตช์ควบคุมการยกแขนบูมด้านขวาค้างไว้ไปยังตำแหน่งยกขึ้น พร้อมกัน แล้วบิดกุญแจสตาร์ทเพื่อสตาร์ทอุปกรณ์
-
ปล่อยสวิตช์แขนบูม
Note: ไฟสถานะบนสวิตช์แขนบูมโซนิกจะกะพริบเร็วๆ ซึ่งแสดงว่าระบบแขนบูมโซนิกอยู่ในโหมดปรับเทียบ
ตอนนี้ คุณจะมีเวลา 20 วินาทีในการใช้สวิตช์ยกขึ้นและยกลงตั้งค่าระยะห่างระหว่างแขนบูมกับพื้นดิน
หลังจาก 20 วินาที ไฟสถานะจะกะพริบช้าๆ
-
ยกส่วนแขนบูมด้านนอกขึ้นและลงโดยใช้สวิตช์ควบคุมการยกแขนบูมเพื่อปรับความสูงของแขนบูมแต่ละฝั่ง
จนกระทั่งได้ระยะห่างระหว่างปลายแขนบูมกับพื้นดินตามต้องการ