소개
AutoSteer 키트는 잔디 살포용 차량에 사용되는 GeoLink™ 스프레이 시스템용 액세서리이며, 전문 작업자가 상업용으로 사용해야 합니다. 주로 공원, 골프 코스, 경기장, 상업지 등의 관리가 잘 된 잔디에서 살포 작업을 하도록 설계되었습니다. 이 제품을 지정되지 않은 용도로 사용하면 작업자나 주변 사람들이 위험해질 수 있습니다.
이 정보를 주의 깊게 읽고 제품을 제대로 조작 및 유지관리하는 방법과 부상 및 제품 손상을 방지하는 방법에 대해 익히십시오. 사용자는 제품을 제대로 안전하게 조작해야 할 책임이 있습니다.
제품 안전성과 사용법 교육 자료, 액세서리 관련 정보 등이 필요하거나 판매점 연락처 정보를 얻거나 제품을 등록하려면 www.Toro.com을 방문하십시오.
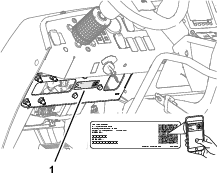
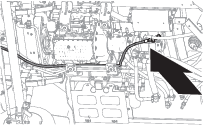
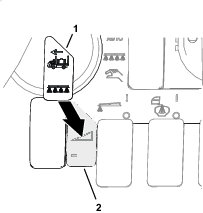
서비스, Toro 순정 부품 또는 추가 정보가 필요하면 지정 서비스점 또는 Toro 고객 서비스에 연락하여 제품의 모델 번호와 일련 번호를 알려 주십시오. 그림 1은 제품의 모델 번호와 일련번호의 위치를 보여 줍니다. 마련된 빈칸에 이 번호를 적어 두십시오.
Important: 모바일 기기에서는 일련번호판의 QR 코드(장착한 경우)를 스캔하여 보증, 부품 및 기타 제품 정보를 액세스할 수 있습니다.
본 설명서는 잠재적인 위험에 대해 설명하고 있으며, 권장 예방 조치를 따르지 않을 경우 심각한 부상이나 사망을 초래할 수 있는 위험에 대해서는 안전 경고 기호(그림 2)로 표시합니다.

본 설명서에서는 2가지 단어를 사용하여 정보를 강조합니다. 중요는 특별한 기계적 정보에 대한 주의를 환기시키며 참고는 특별한 주의를 기울일 필요가 있는 일반 정보를 강조합니다.
안전
경고
스프레이 시스템에 사용되는 화학물질은 운전자, 주변 사람, 동물, 식물, 토양 등에 유해하거나 유독할 수 있습니다.
-
사용하는 모든 화학물질의 화학물질 경고 라벨 및 안전보건자료(SDS)를 주의하여 읽고 화학물질 제조사의 권고 사항에 따라 자신을 보호하십시오. 예를 들어, 안면보호대, 보안경, 장갑 등의 적절한 개인보호장비(PPE)를 사용하여 화학물질과 접촉하지 않도록 하십시오.
-
1개 이상의 화학물질을 사용할 수 있으며 각 화학물질에 대한 정보를 참조하여 평가하십시오.
-
이 정보가 없으면 스프레이어 작동 또는 작업을 수행하지 마십시오.
-
스프레이 시스템을 사용하기 전에 화학물질 제조사의 권고 사항에 따라 시스템을 삼중으로 세척 및 중화하고 모든 밸브를 3번 순환시켰는지 확인하십시오.
-
주변에 깨끗한 물과 비누를 준비하고 화학물질과 접촉하면 즉시 씻어 내십시오.
장비를 끄고 키를 뺀 다음(꽂혀 있는 경우) 모든 움직임이 멈출 때까지 기다려 운전석에서 내리십시오. 장비가 식은 후에 장비를 조정, 정비, 청소 또는 보관하십시오.
이 장비를 잘못 사용하거나 정비하면 사람이 다치는 사고가 생길 수 있습니다. 부상 위험을 줄이려면 여기에 나와
있는 안전 지침을 따르고 주의, 경고 또는 위험과 같은 개인 안전 지침을 의미하는 안전 경고 기호( )에 항상 주의를 기울이십시오.
이 지침을 따르지 않으면 사람이 다치거나 사망하는 사고가 발생할 수 있습니다.
)에 항상 주의를 기울이십시오.
이 지침을 따르지 않으면 사람이 다치거나 사망하는 사고가 발생할 수 있습니다.
안전 및 교육용 전사지
|
안전 문구 데칼과 지침은 운전자의 눈에 쉽게 보이며 잠재적인 위험이 있는 모든 부분에 부착되어 있습니다. 손상되거나 유실된 데칼은 교체하십시오. |


설치
휠 제거
-
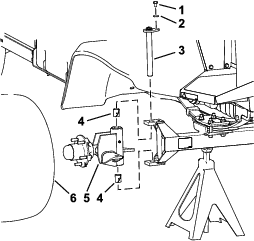
장비를 들어 올린 다음 잭스탠드로 지탱합니다. 장비 사용 설명서를 참조하십시오.
-
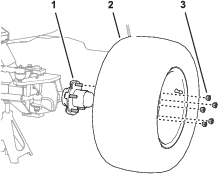
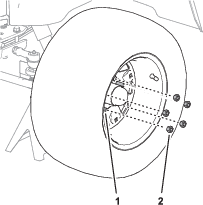
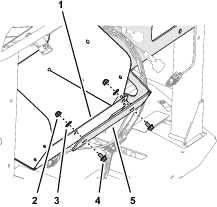
왼쪽 타이어와 휠을 휠 허브에 고정하는 휠 너트 5개를 제거하고 장비에서 휠을 분리합니다(그림 4).
휠 각도 센서 끼움쇠 설치
-
왼쪽 앞 타이어를 분리합니다.
-
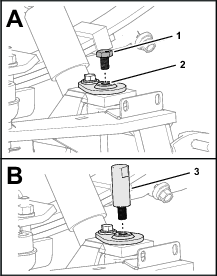
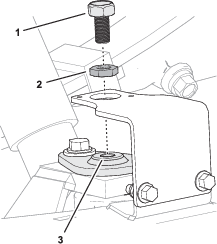
킹핀의 상단에서 볼트와 와셔를 제거한 다음 킹핀을 분리합니다.
-
장비에서 휠 허브/스핀들 어셈블리를 회전합니다.
-
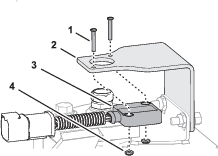
휠 허브/스핀들 어셈블리에 끼움쇠를 설치합니다.
-
휠 허브/스핀들 어셈블리, 킹핀, 휠을 설치합니다. 75~102 N·m로 러그 너트를 조입니다.
-
장비를 운전하고 문제가 해결되었는지 확인합니다.
조종 위치 센서 설치
이 절차를 수행하는 데 필요한 부품:
| 조종 위치 센서(자석 타깃과 센서) | 1 |
| 잼 너트(10 mm) | 1 |
| 센서 브래킷 | 1 |
| 센서 정렬 도구 | 1 |
| 팬 헤드 나사(#4 x 3/4 인치) | 2 |
| 록너트(#4) | 2 |
| 플랜지 헤드 캡나사(1/4 x 3/4 인치) | 2 |
| 록너트(¼ 인치) | 2 |
센서 브래킷 설치
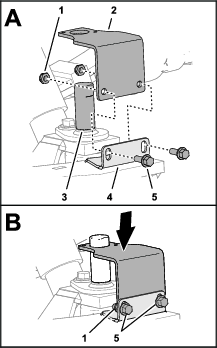
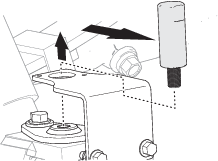
자석 타깃과 센서 조립
자석 타킷 조정
소프트웨어 버전 확인
-
키를 RUN(운행)(휘발유) 또는 PREHEAT/RUN(예열/운행)(디젤) 위치로 돌립니다.
-
제어 콘솔의 왼쪽 상단에 있는 ABOUT(정보)(Toro) 아이콘을 누릅니다(그림 13).
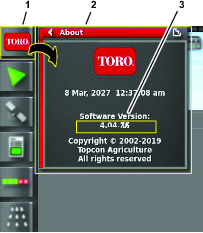
-
소프트웨어 버전이 올바르면 About(정보) 대화창에 소프트웨어 버전 4.04 이상이 표시됩니다.
Note: 소프트웨어 버전이 다를 경우, Toro 기술 지원 센터에 문의하시기 바랍니다.
최소 하드웨어 요건 확인
Danfoss PLUS+1® 정비 도구를 설치하기 전에 노트북 컴퓨터이 하드웨어, 운영 체제, 애플리케이션 요건을 충족하는지 확인하십시오. 하기 표를 참조하십시오.
|
구성품 |
최소 용량 |
|---|---|
|
CPU* |
1.5 GHz, 32비트, 1개 코어, 2008년식 이상 |
|
메모리 |
1 GB |
|
미사용 하드 드라이브 공간 |
1 GB 이상 |
|
최소 디스플레이 해상도 |
1024 x 768 |
|
USB 포트 |
버전 2.0 이상 |
|
* CPU는 노트북 전용이어야 합니다. 넷북, 태블릿이나 기타 유사한 장치용 프로세서는 권장하지 않습니다. |
|
|
소프트웨어 |
버전 |
|---|---|
|
운영 체제 버전 |
Microsoft Windows 7 - 32비트 |
|
OS 구성 요소 |
MSXML 4.0, 서비스 팩 2 (Microsoft XML 코어 서비스) |
|
사용자 계정 권한 |
로컬 관리자 접근권 |
|
소프트웨어 |
참고 |
|---|---|
|
이메일 클라이언트/리더 |
라이선스 등록용. |
|
PDF 리더 |
최신 표준을 준수하는 리더. |
|
웹 브라우저 |
최신 표준을 준수하는 웹 브라우저(HTML 기반 F1 도움말용) |
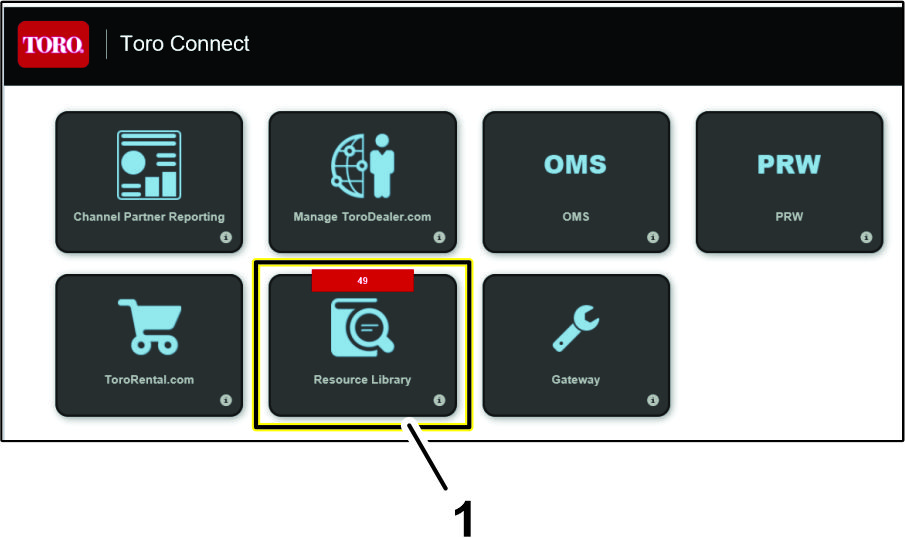
소프트웨어 및 진단 데이터 파일 다운로드
-
Toro Connect 웹 페이지에 액세스합니다(그림 14).
-
Resource Library(리소스 라이브러리) 아이콘을 좌클릭합니다(그림 14).
-
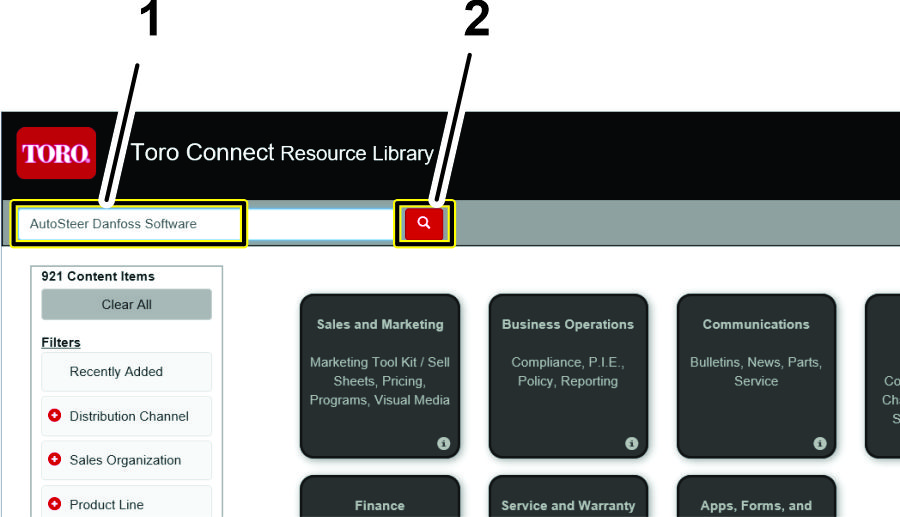
Enter Search Terms(검색 용어 입력) 텍스트 박스에 을 기입한 다음 검색 버튼을 좌클릭합니다(그림 15).
-
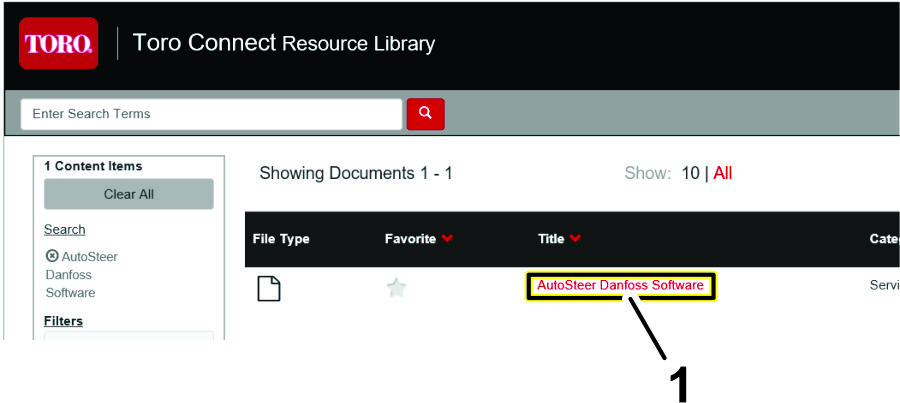
문서 보기 목록에서 AutoSteer Danfoss Software 하이퍼링크를 더블 클릭합니다(그림 16).
-
문서 정보 페이지에서 PVED-CLS 2.00 firmware release package.zip 하이퍼링크를 클릭합니다(그림 17).
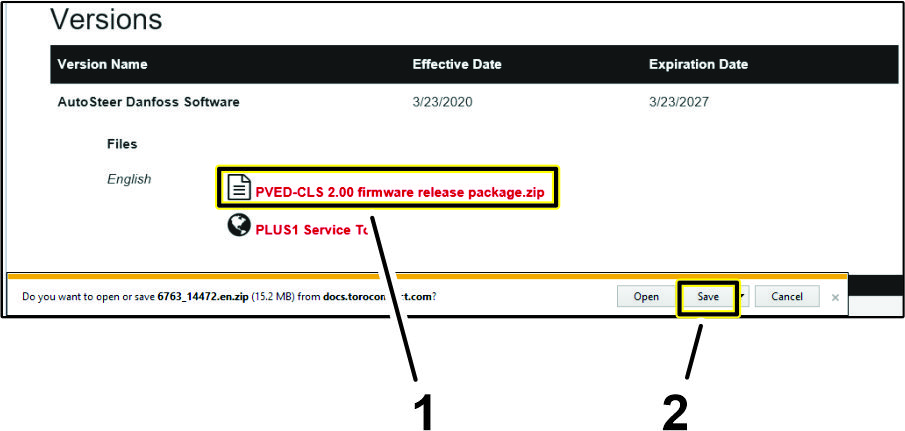
-
Save(저장) 버튼을 클릭합니다(그림 17).
Note: 노트북 컴퓨터의 다운로드 디렉터리에 파일이 저장됩니다.
-
문서 정보 페이지에서 Plus1 Service Tool 하이퍼링크를 클릭합니다(그림 18).
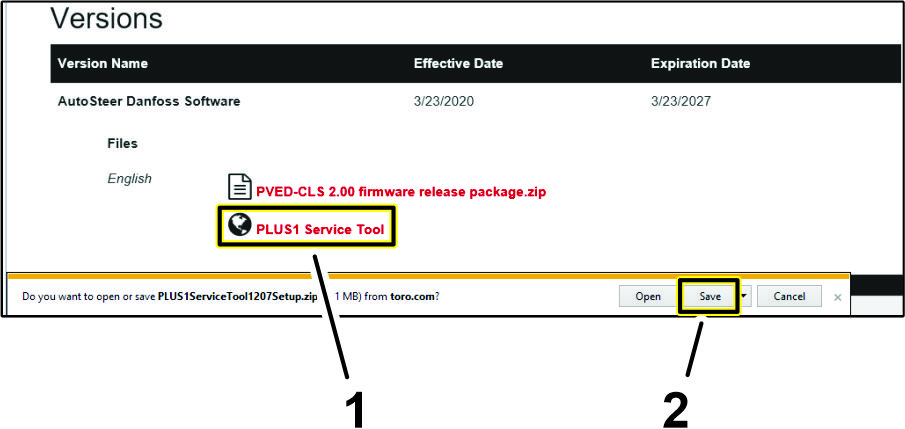
-
Save(저장) 버튼을 클릭합니다(그림 18).
Note: 노트북 컴퓨터의 다운로드 디렉터리에 파일이 저장됩니다.
소프트웨어 및 진단 데이터 파일 설치
소프트웨어 설치
Important: PLUS+1 정비 도구를 설치하는 사람은 노트북 컴퓨터에 대한 관리자 권한을 가지고 있어야 합니다.
-
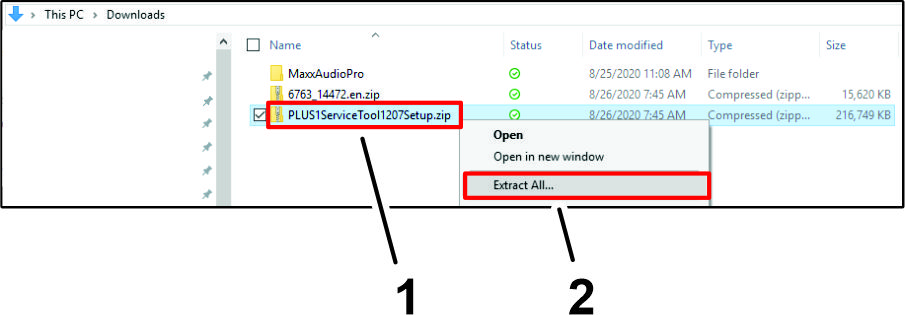
노트북 컴퓨터의 다운로드 디렉터리를 열고 PLUS1ServiceTool1207Setup.zip 파일 링크를 우클릭한 다음 드롭다운 메뉴에서 Extract All...(모두 추출...) 링크를 클릭합니다(그림 19).
-
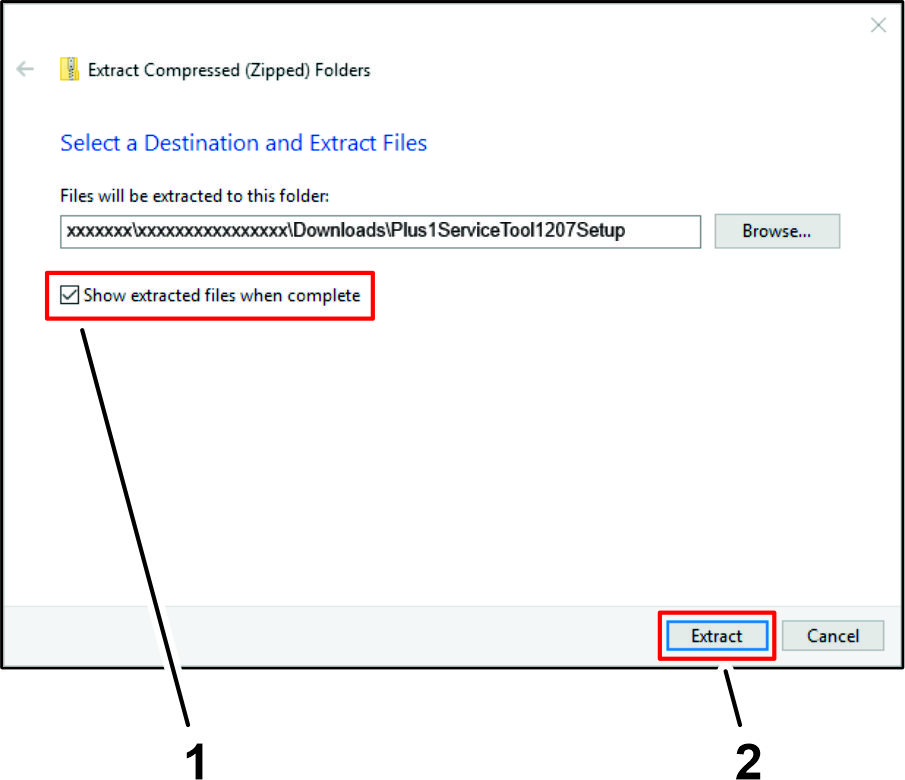
Extract Compressed dialog box(압출 파일 추출 대화상자)에서 (완료 후 추출 파일 표시) 체크 박스가 선택되었는지 확인한 다음 (추출) 버튼을 클릭합니다(그림 20).
-
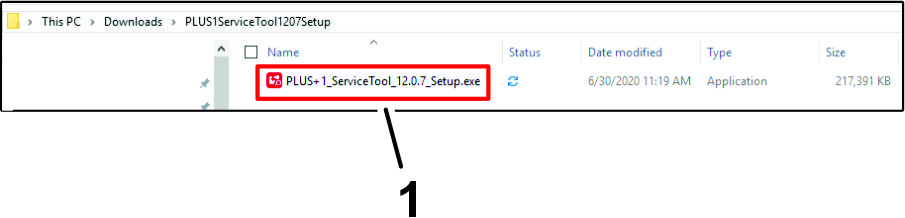
PLUS1SERVICETOOL1207SETUP 디렉터리에서 PLUS+1_ServiceTool_12.7_Setup.exe 파일을 더블 클릭합니다(그림 21).
-
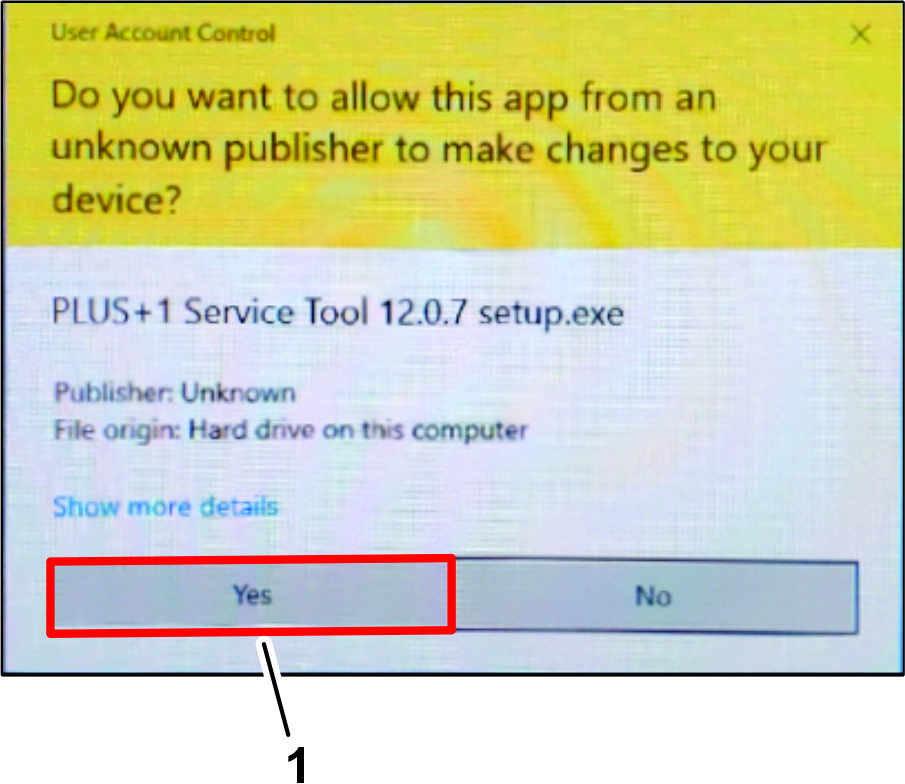
사용자 계정 제어 대화상자가 표시되면 YES(예) 버튼을 클릭합니다(그림 22).
-
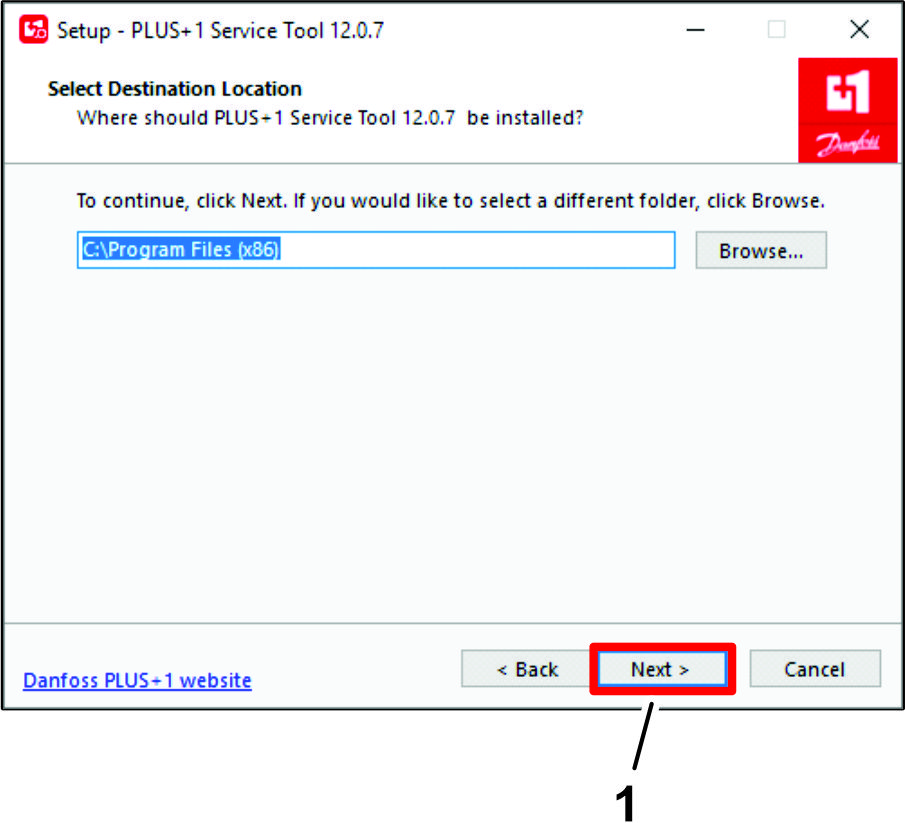
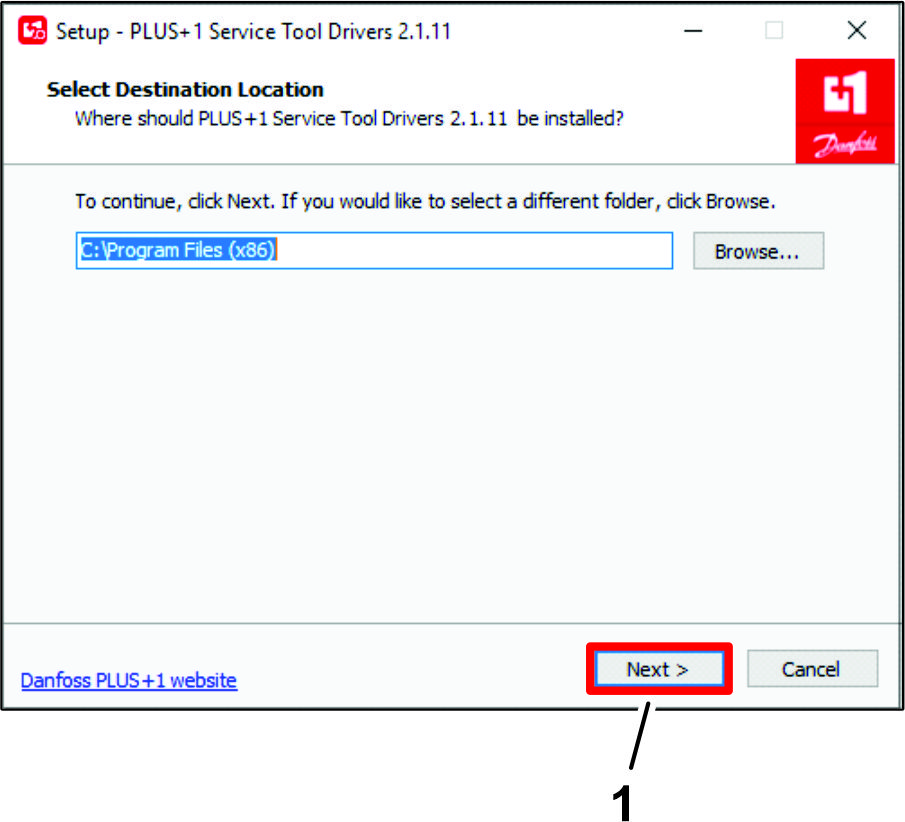
도착지 위치 선택 대화상자에서 NEXT(다음) 버튼을 클릭합니다(그림 23).
-
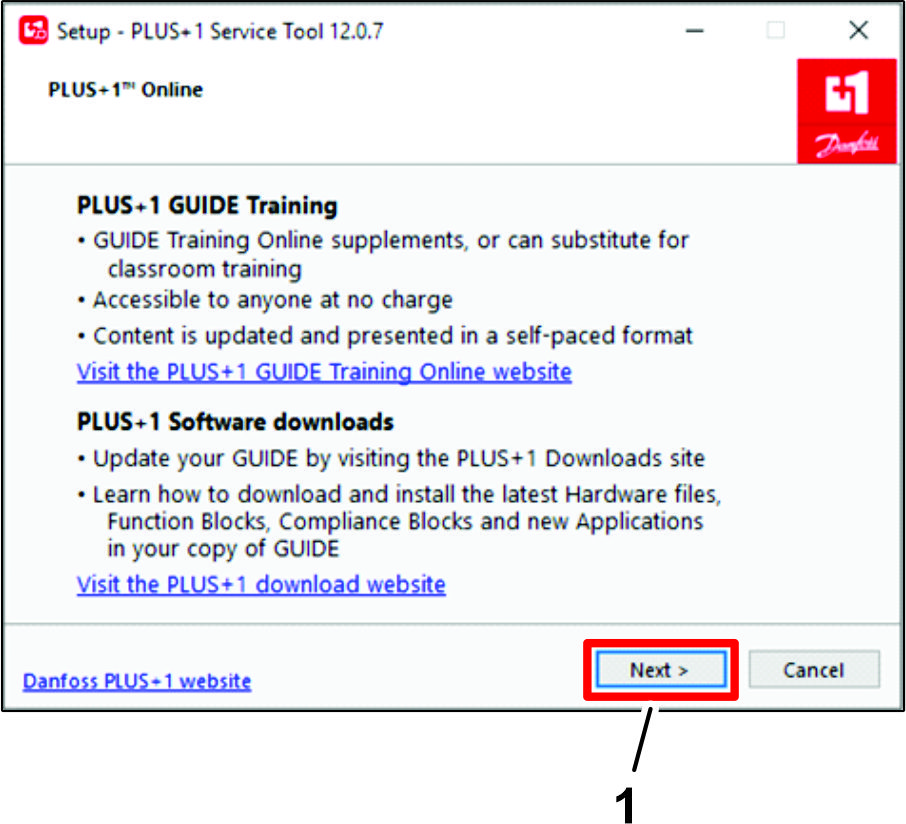
Plus+1 Online 대화상자에서 NEXT(다음) 버튼을 클릭합니다(그림 24).
-
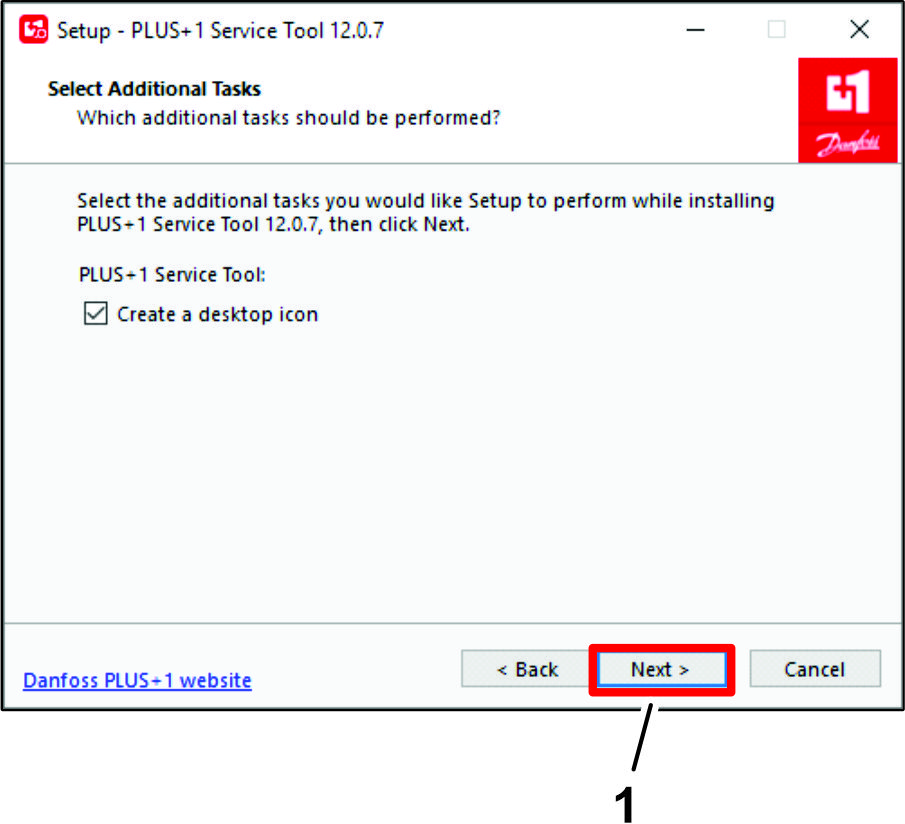
추가 작업 선택 대화상자에서 NEXT 버튼을 클릭합니다(그림 25).
-
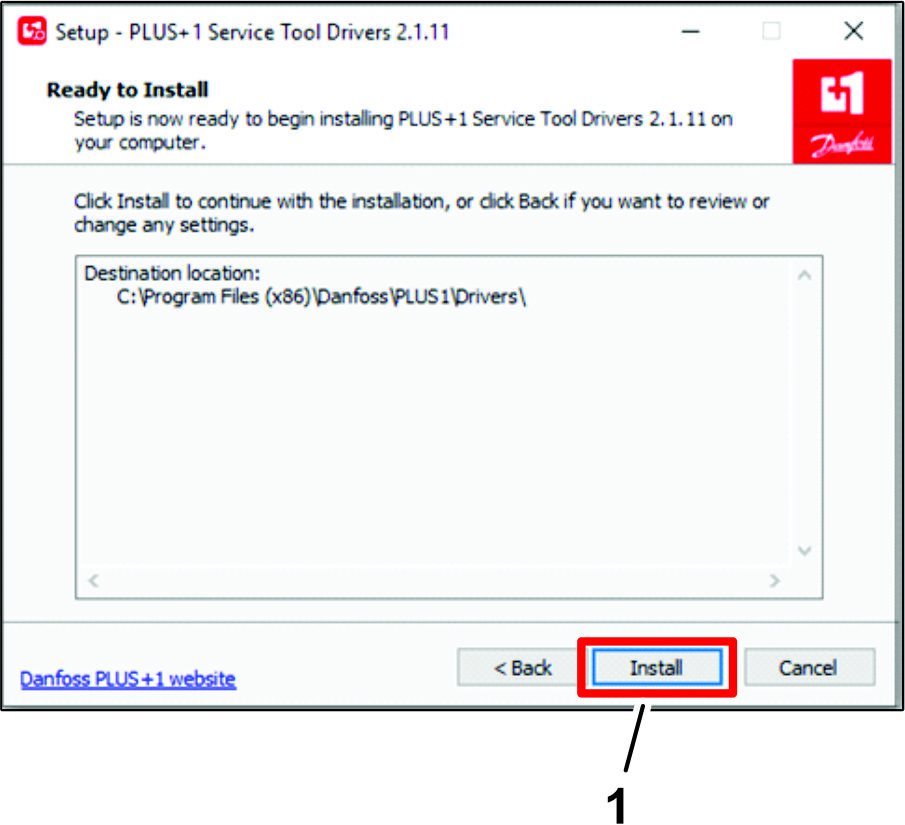
설치 준비 완료 대화상자에서 INSTALL(설치) 버튼을 클릭합니다(그림 26).
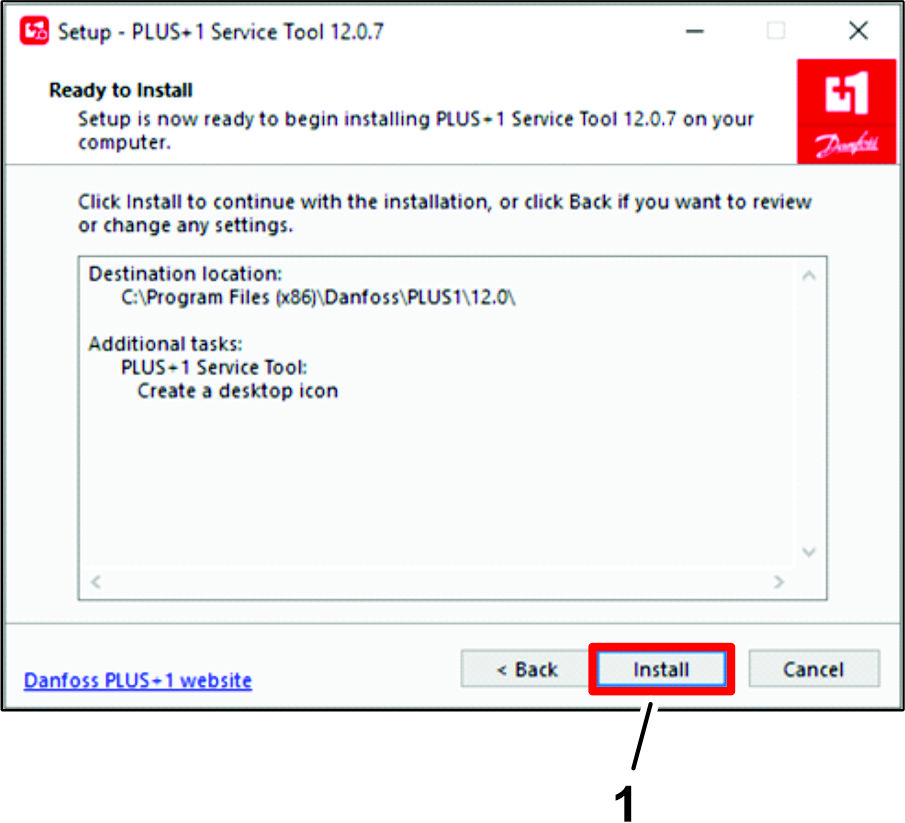
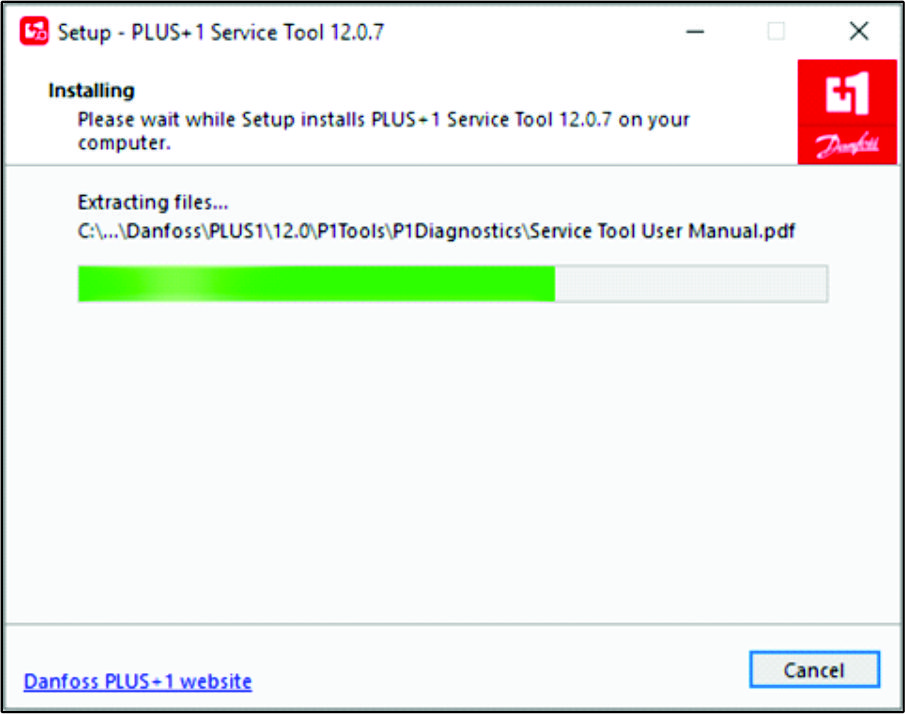
Note: 진행도 대화상자(그림 27)가 표시됩니다.
-
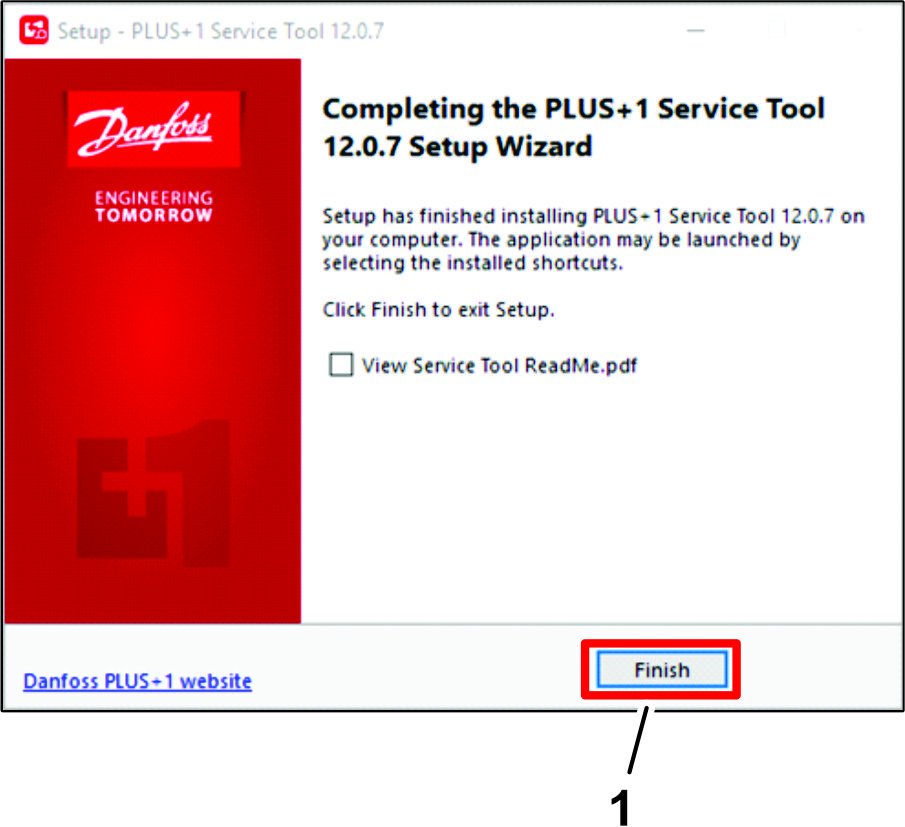
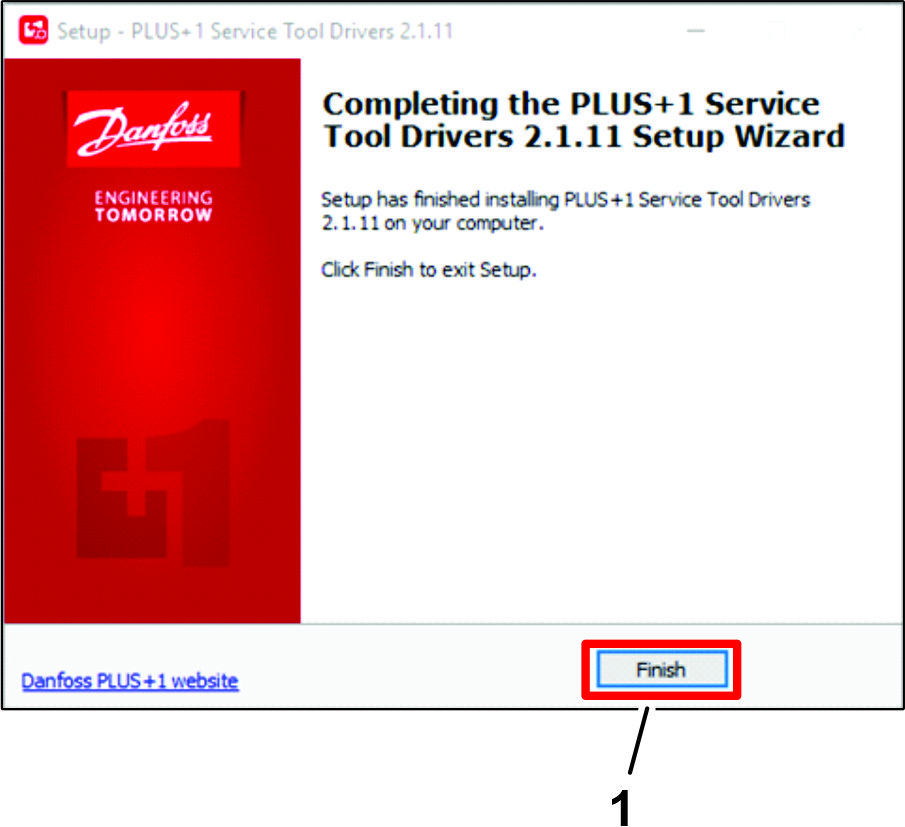
정비 도구 설정 마법사 완료 대화상자에서 FINISHED(완료) 버튼을 클릭합니다(그림 28).
드라이버 설치

진단 데이터 파일 준비
-
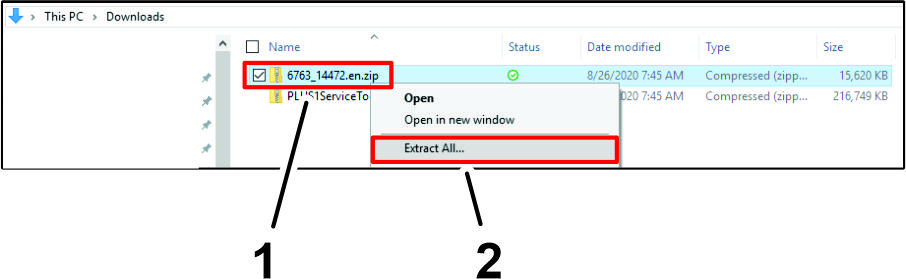
노트북 컴퓨터의 다운로드 디렉터리를 열고 6763_14472.en.zip 링크를 우클릭한 다음 드롭다운 메뉴에서 Extract All...(모두 추출...) 링크를 클릭합니다(그림 34).
-
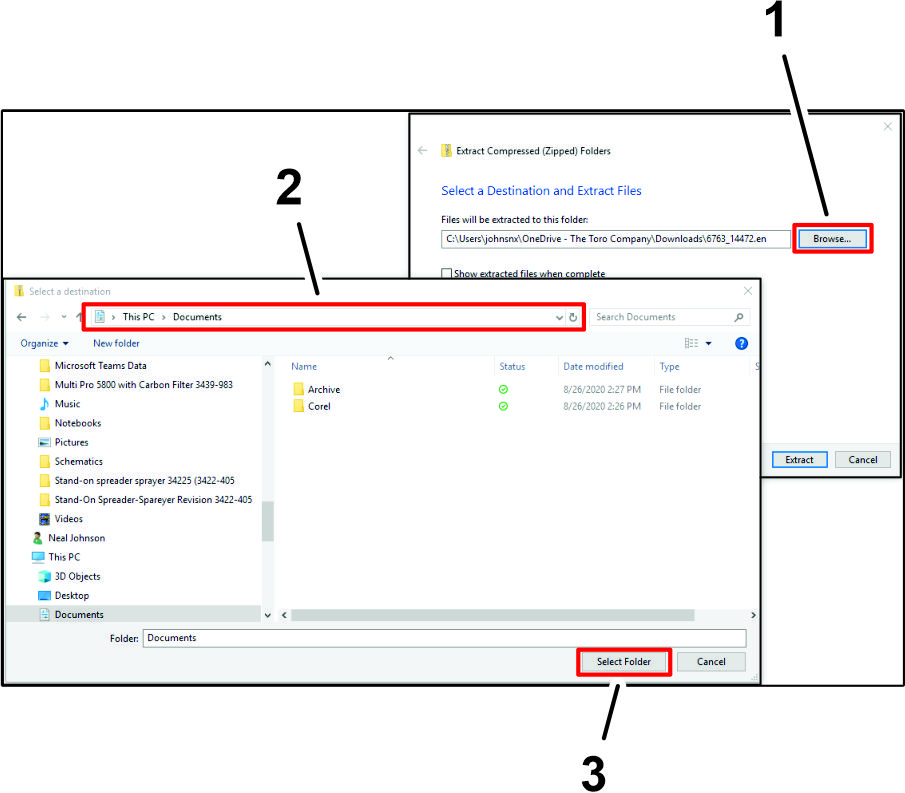
Extract Compressed dialog box(압출 파일 추출 대화상자)에서 (검색) 버튼을 클릭합니다(그림 35).
-
도착지 선택 대화상자에서 (문서) 폴더로 이동한 다음 버튼을 클릭합니다(그림 35).
-
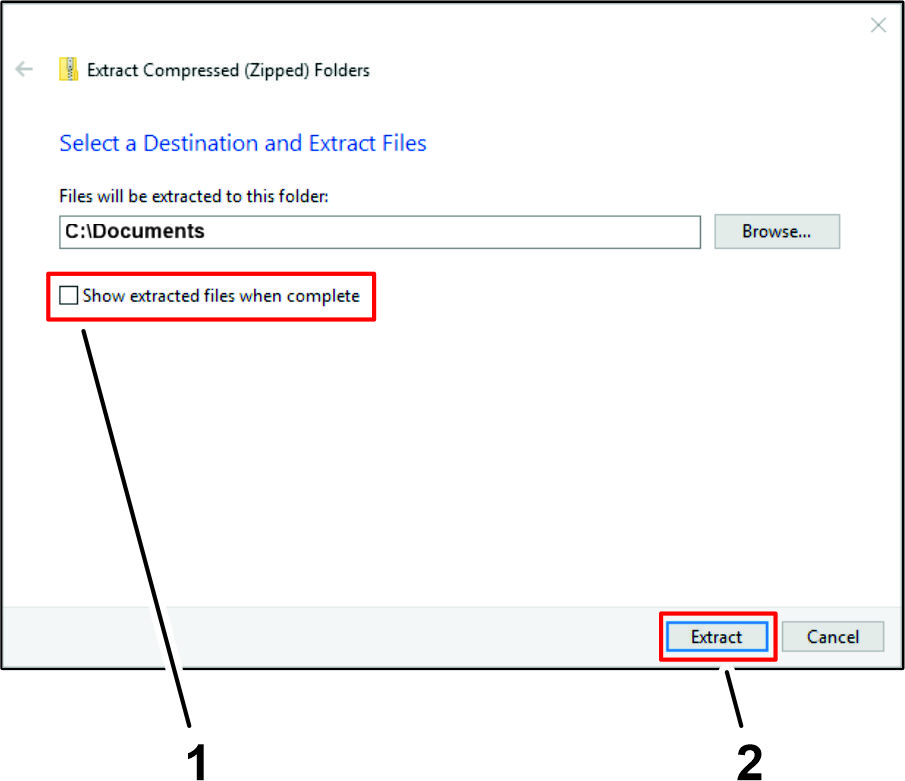
Extract Compressed dialog box(압출 파일 추출 대화상자)에서 (완료 후 추출 파일 표시) 체크 박스를 선택 해제한 다음 (추출) 버튼을 클릭합니다(그림 36).
게이트웨이 채널 선택
-
노트북의 USB 포트에 USB/CAN 인터페이스 케이블을 끼웁니다.
-
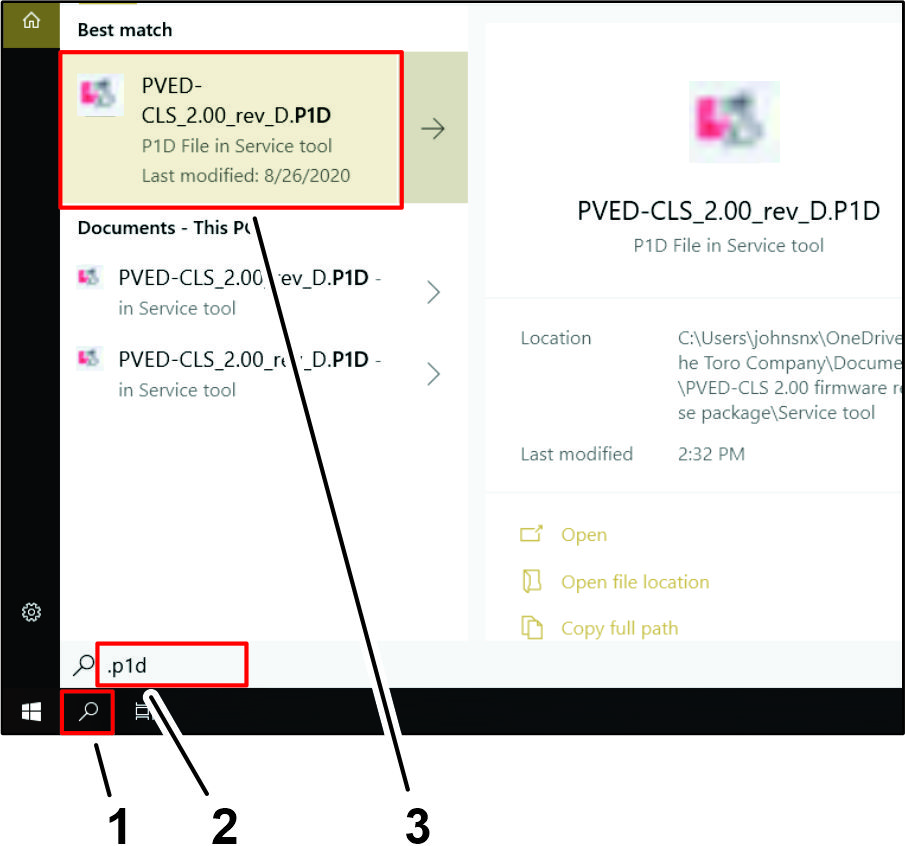
Windows 작업창에서 (검색) 아이콘을 클릭합니다(그림 37).
-
(검색하려면 여기에 입력) 텍스트 박스에서 를 입력한 다음 Enter 키를 누릅니다(그림 37).
-
PVED-CLS_2.00_rev_D.P1D 아이콘을 클릭합니다(그림 37).
Note: Plus+1 정비 도구 애플리케이션이 노트북에 표시됩니다(그림 38).
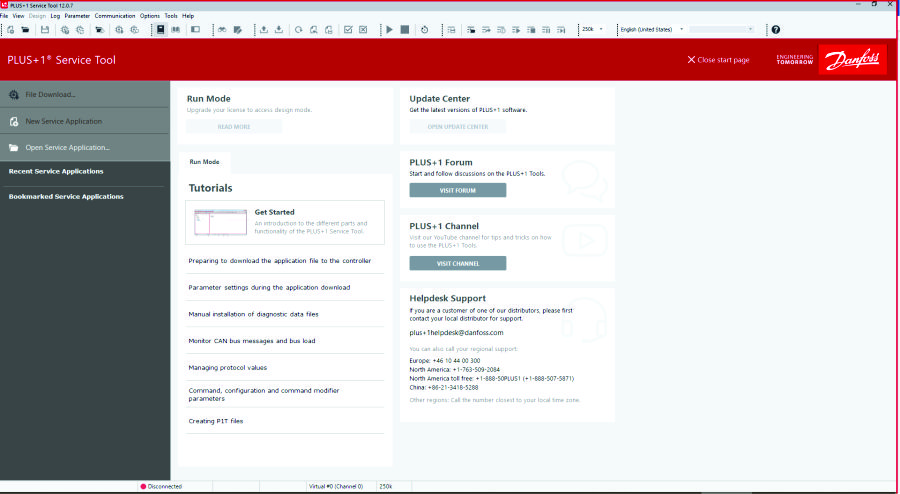
-
컴퓨터에 Select Gateway Channel 화면이 표시되면 10 단계를 건너 뜁니다.
-
리본 창에서 Communication(커뮤니케이션) 버튼을 클릭합니다(그림 39).
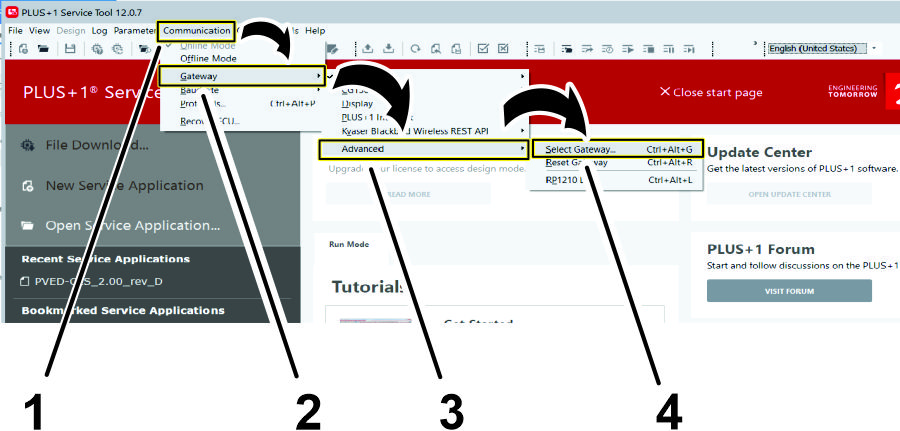
-
Communication(커뮤니케이션) 드롭다운 메뉴에서 Gateway(게이트웨이) 버튼을 클릭합니다(그림 39).
-
Gateway(게이트웨이) 드롭다운 메뉴에서 Advanced(고급) 버튼을 클릭합니다(그림 39).
-
Advanced(고급) 드롭다운 메뉴에서 Select Gateway...(게이트웨이 선택...) 버튼을 클릭합니다(그림 39).
-
Select Gateway Channel(게이트웨이 채널 선택) 화면에서 Gateways(게이트웨이) 목록의 Kvaser 옵션을 클릭합니다(그림 40).
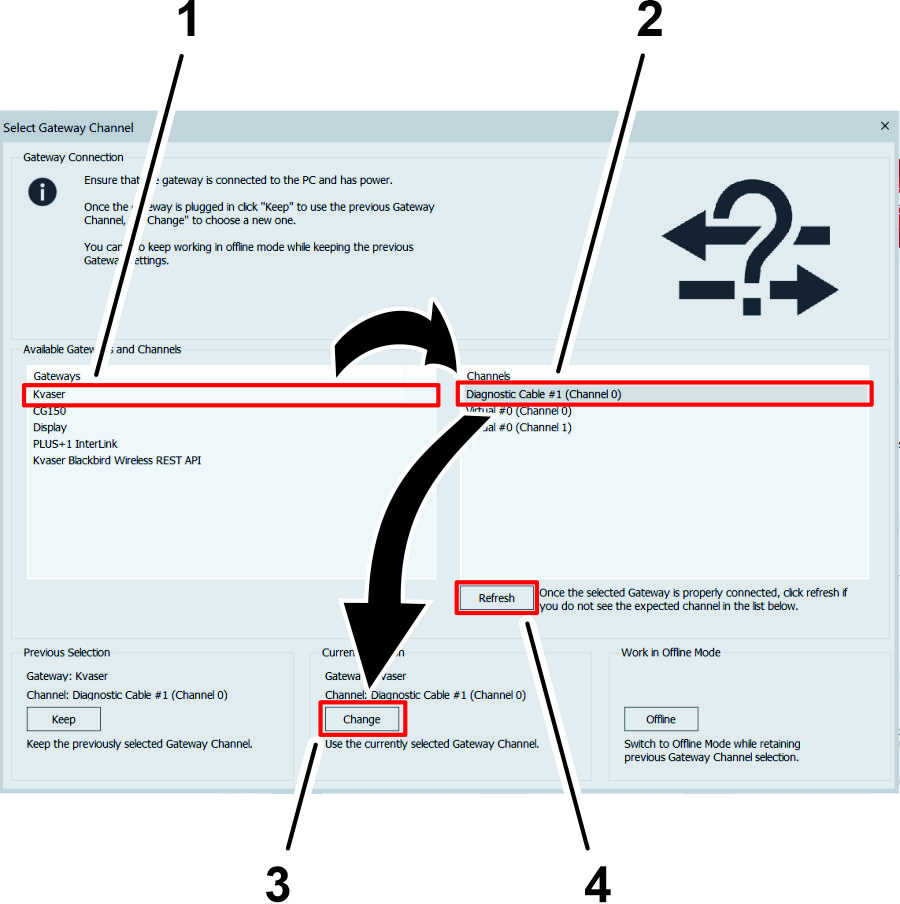
-
Channels(채널) 메뉴에서 Diagnostic Cable(진단 케이블) 옵션을 클릭합니다(그림 40).
Note: 진단 케이블 옵션에 채널 메뉴가 표시되지 않을 경우, Toro 진단 케이블이 노트북 컴퓨터의 USB 포트에 끼워져 있는지 확인한 다음 Select Gateway Channel(게이트웨이 채널 선택) 화면의 Refresh(새로 고침) 버튼(그림 40)을 누른 다음 Diagnostic Cable(진단 케이블) 옵션을 클릭합니다.
-
Current Selection(현재 선택) 제목 아래의 CHANGE(변경) 버튼을 클릭합니다(그림 40).
펌웨어 릴리스 패키지 파일 설치
APP_CLS_M 데이터 파일 설치
Important: PVED CLS 펌웨어 릴리스 패키지를 설치하려면 노트북의 관리자 권한이 있어야 합니다.
-
노트북 컴퓨터에서 노트북 컴퓨터의 Danfoss Plus+1 정비 도구를 엽니다.
-
(파일) 아이콘을 클릭한 다음 드롭다운 메뉴에서 (진단 데이터 설치...) 아이콘을 클릭합니다(그림 41).
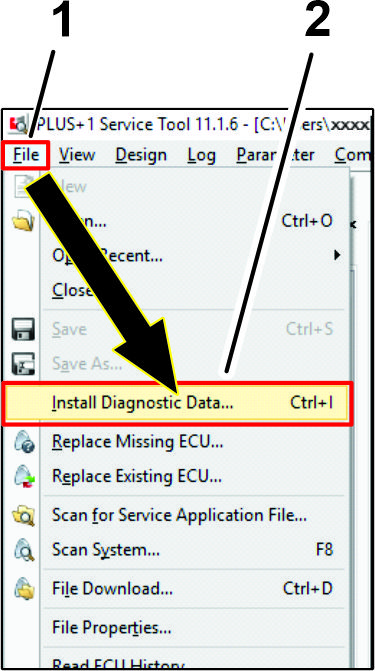
-
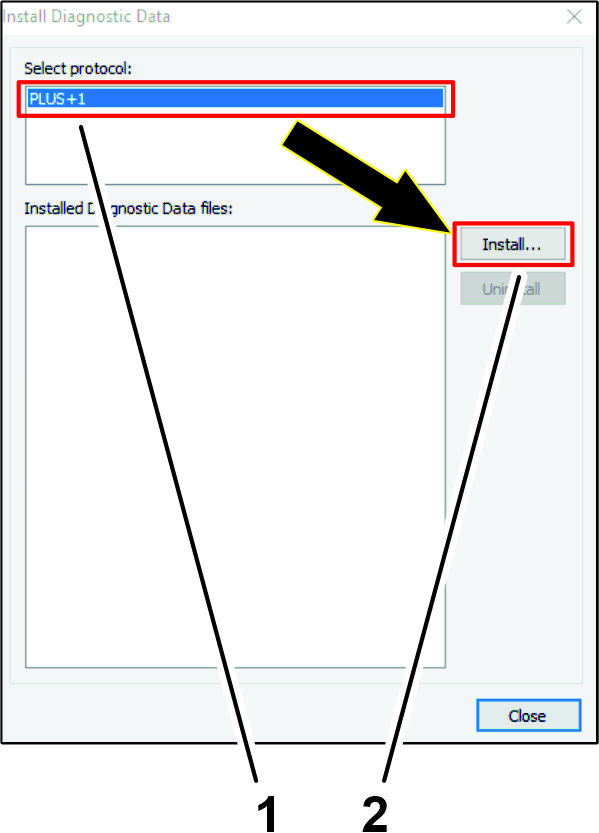
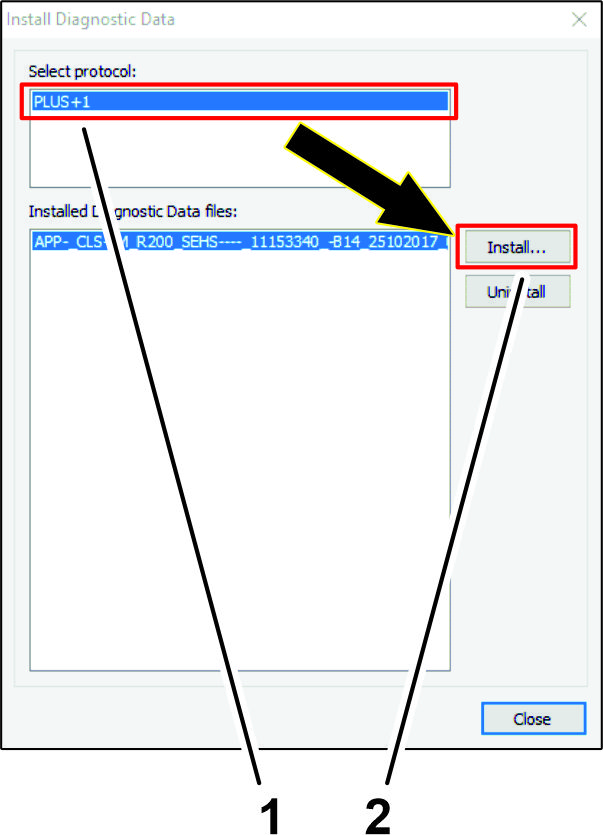
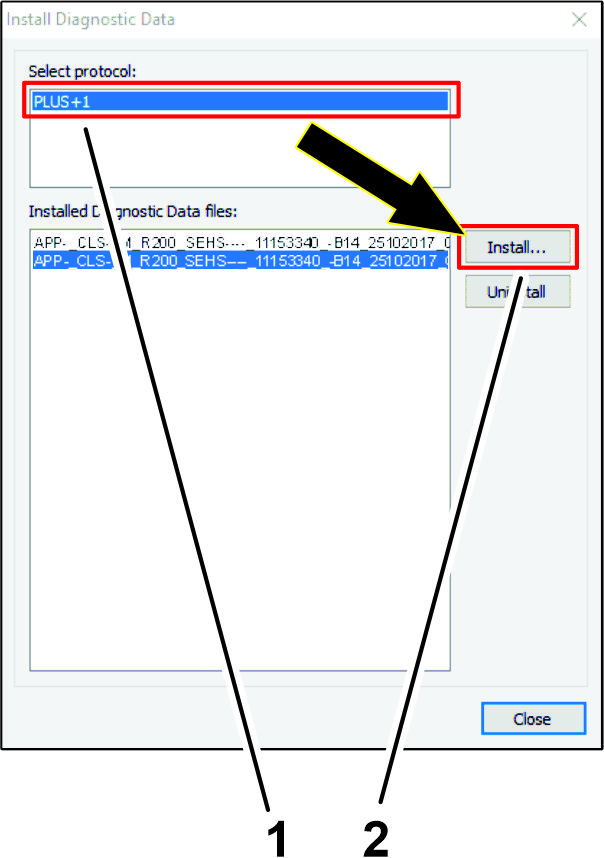
진단 데이터 설치 대화상자에서 PLUS+1 프로토콜 아이콘을 클릭한 다음 (설치) 아이콘을 누릅니다(그림 42).
-
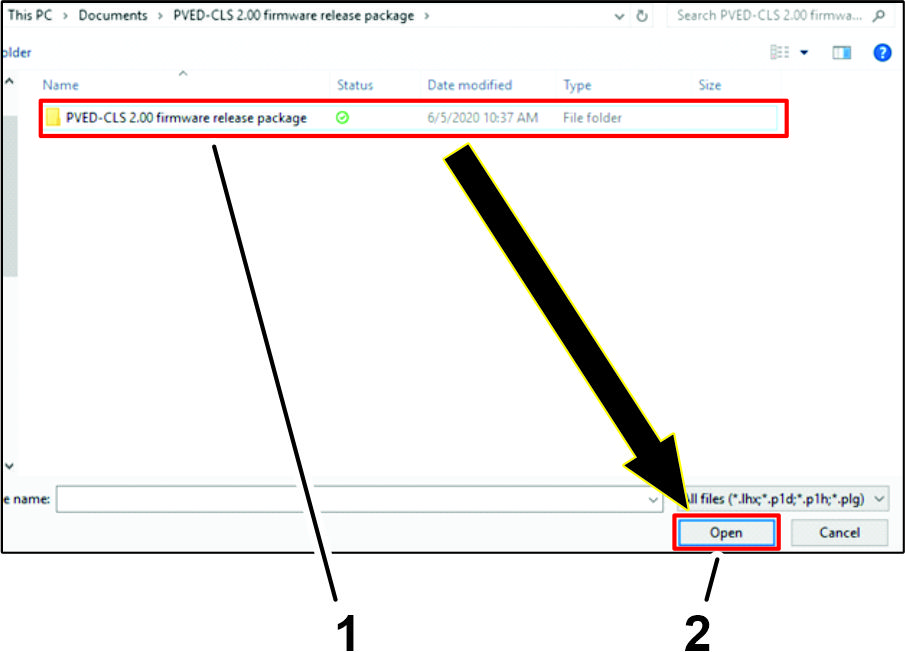
PVED-CLS 2.00 firmware release package.zip 파일을 검색한 다음 PVED-CLS 2.00 firmware release package(PVED-CLS 2.00 펌웨어 릴리스 패키지) 폴더를 클릭한 다음 (열기) 아이콘을 클릭합니다(그림 43).
-
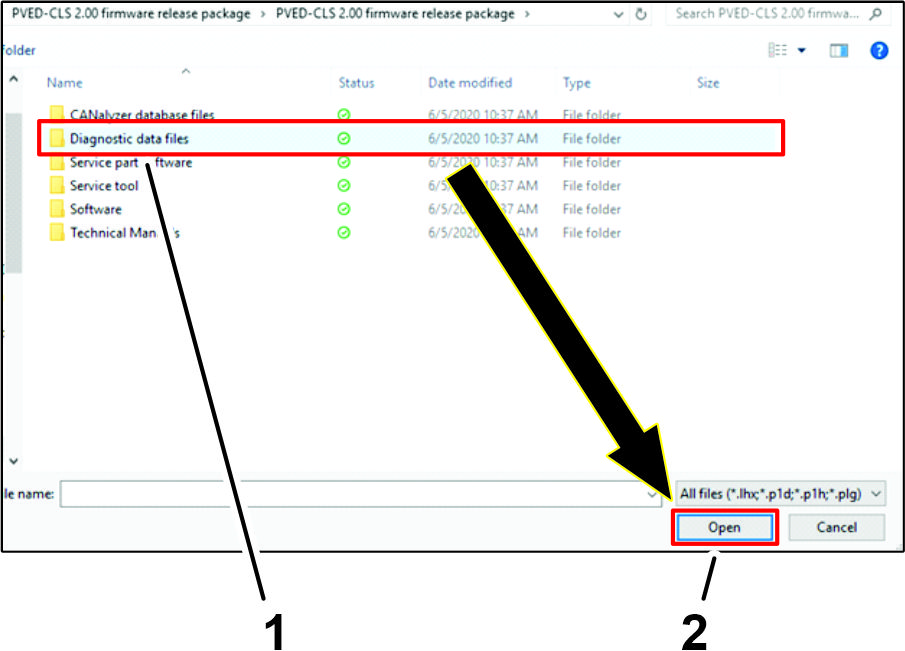
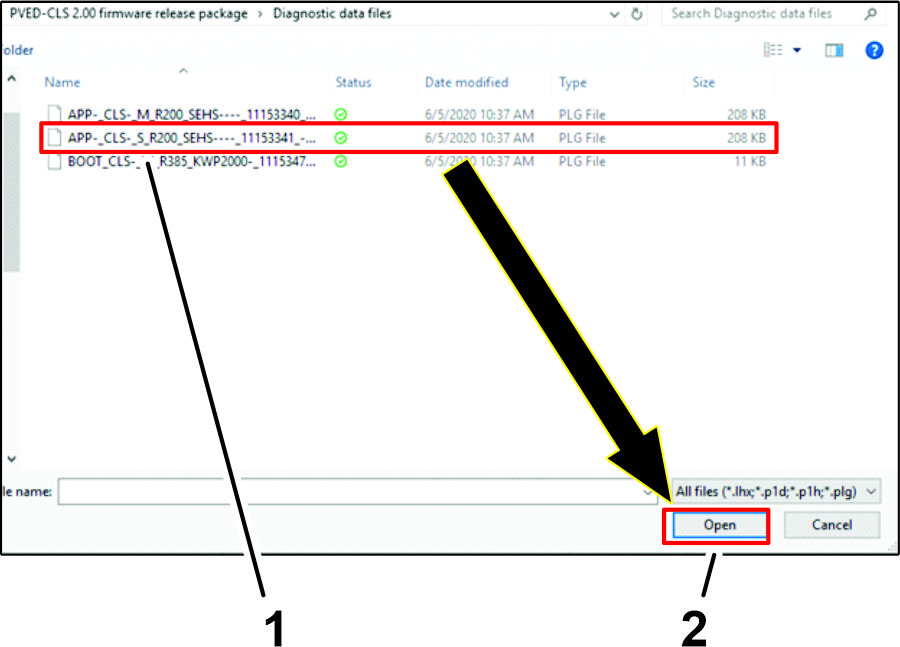
Diagnostic data files(진단 데이터 파일) 폴더를 클릭한 다음 (열기) 아이콘을 클릭합니다(그림 44).
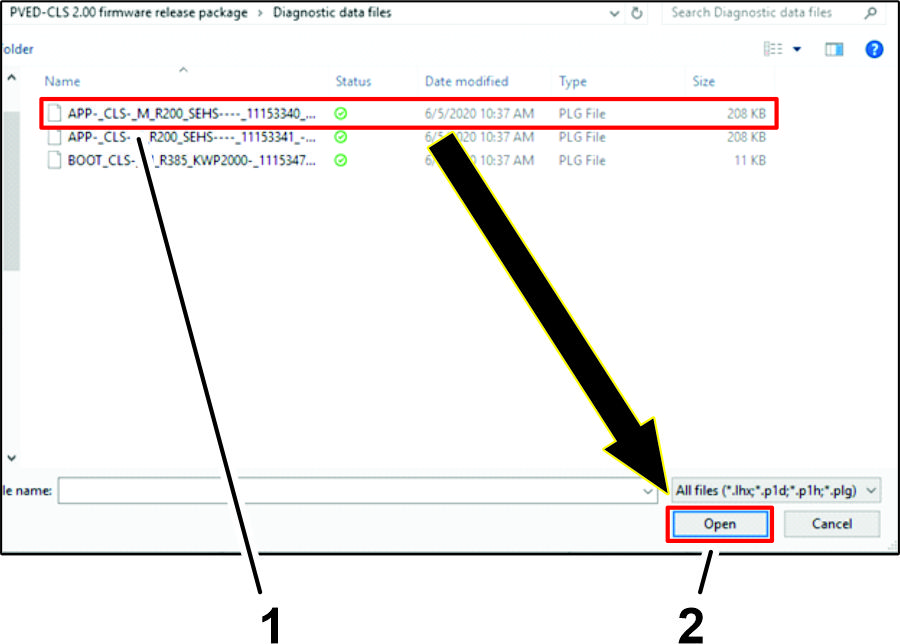
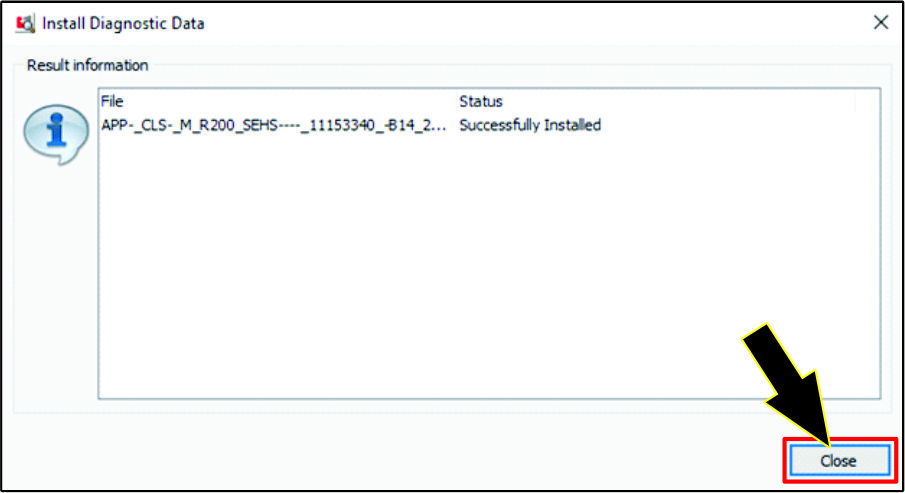
APP-_CLS-_M_R200_SEHS----_11153340_... 파일을 클릭한 다음 (열기) 아이콘을 클릭합니다(그림 45).
-
(결과 정보) 대화상자에서 (닫기) 아이콘을 클릭합니다(그림 46).
APP_CLS_S 데이터 파일 설치
-
(파일) 아이콘을 클릭한 다음 드롭다운 메뉴에서 (진단 데이터 설치...) 아이콘을 클릭합니다(그림 47).
-
Select Protocol(프로토콜 선택) 대화상자에서 PLUS+1 프로토콜 아이콘을 클릭한 다음 (설치) 아이콘을 누릅니다(그림 48).
-
PVED-CLS 2.00 firmware release package.zip 파일을 검색한 다음 PVED-CLS 2.00 firmware release package(PVED-CLS 2.00 펌웨어 릴리스 패키지) 폴더를 클릭한 다음 (열기) 아이콘을 클릭합니다(그림 49).
-
Diagnostic data files(진단 데이터 파일) 폴더를 클릭한 다음 (열기) 아이콘을 클릭합니다(그림 50).
-
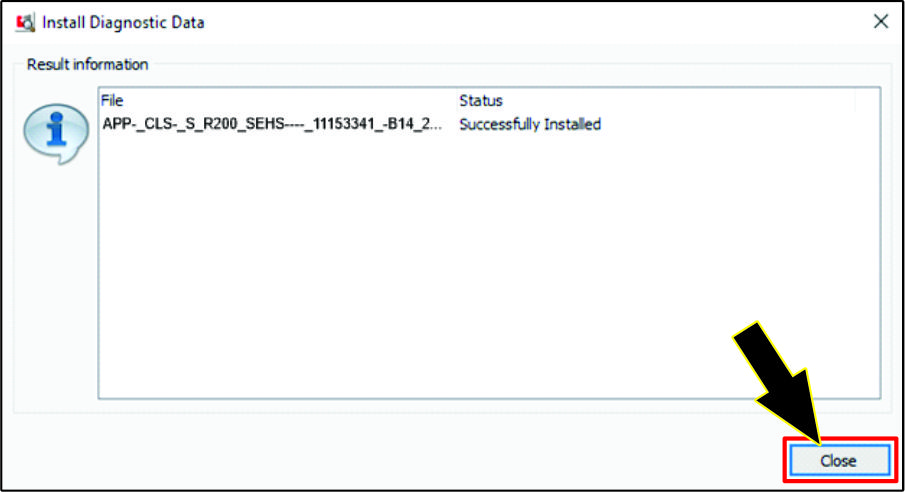
APP-_CLS-_S_R200_SEHS----_11153341_... 파일을 클릭한 다음 (열기) 아이콘을 클릭합니다(그림 51).
-
(결과 정보) 대화상자에서 (닫기) 아이콘을 클릭합니다(그림 52).
BOOTP_CLS 데이터 파일 설치
-
File(파일) 아이콘을 클릭한 다음 드롭다운 메뉴에서 Install Diagnostic Data . . .(진단 데이터 설치...) 아이콘을 클릭합니다(그림 53).
-
Select Protocol(프로토콜 선택) 설치 대화상자에서 PLUS+1 프로토콜 아이콘을 클릭한 다음 (설치) 아이콘을 누릅니다(그림 54).
-
PVED-CLS 2.00 firmware release package(PVED-CLS 2.00 펌웨어 릴리스 패키지) 폴더를 클릭한 다음 (열기) 아이콘을 클릭합니다(그림 55).
-
Diagnostic data files(진단 데이터 파일) 폴더를 클릭한 다음 (열기) 아이콘을 클릭합니다(그림 56).
-
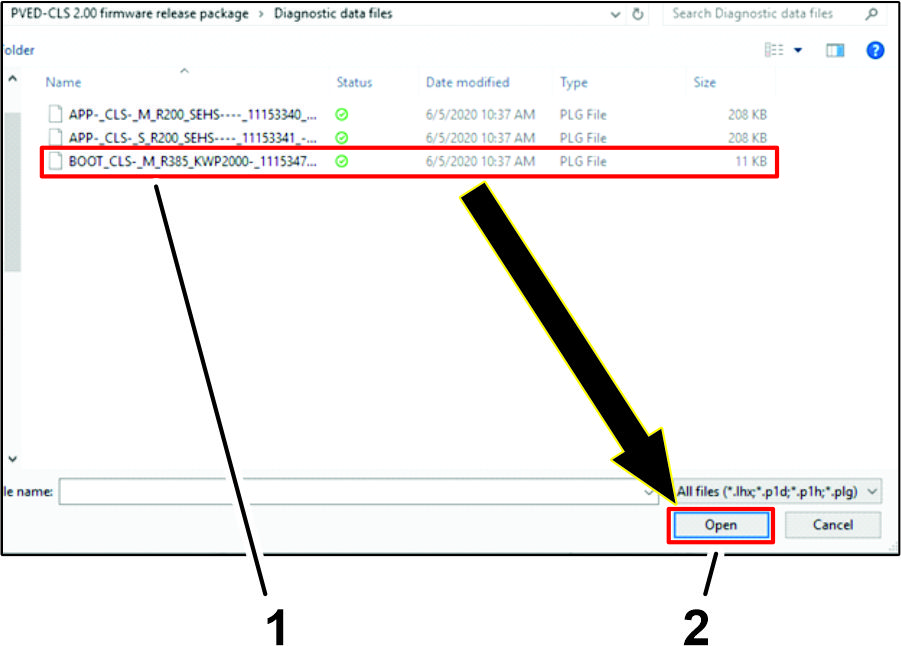
BOOT-_CLS-_M_R385_KWP2000-_1115347_... 파일을 클릭한 다음 (열기) 아이콘을 클릭합니다(그림 57).
-
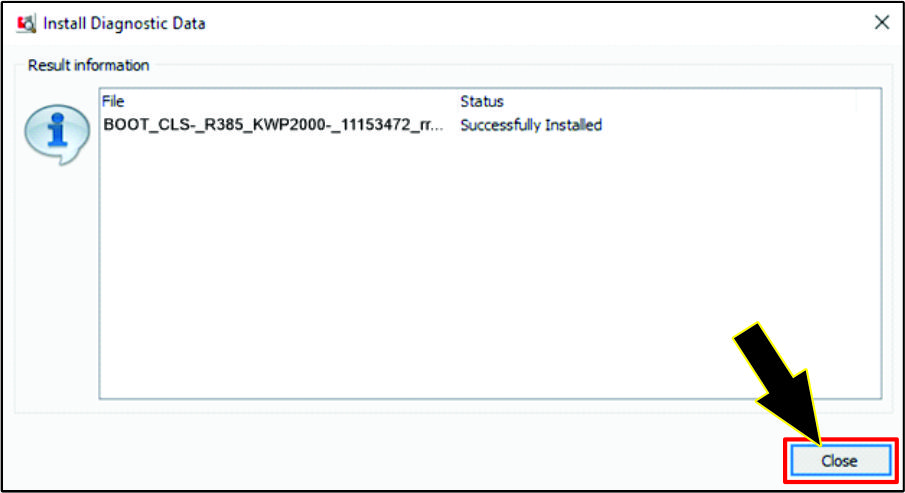
(결과 정보) 대화상자에서 (닫기) 아이콘을 클릭합니다(그림 58).
장비 준비
주의
화학물질은 유해하며 신체 부상을 유발할 수 있습니다.
-
화학물질을 취급하기 전에 화학물질 라벨의 지침을 숙독하고 제조사의 모든 권장 사항 및 주의 사항을 따르십시오.
-
화학물질이 피부에 닿지 않게 하십시오. 피부와 접촉하면 비누와 깨끗한 물로 접촉 부위를 철저히 씻으십시오.
-
화학물질 제조사가 권장한 보안경 및 기타 보호장비를 착용하십시오.
-
장비를 평지에 주차합니다.
-
주차 브레이크를 겁니다.
-
타이어가 똑바로 앞을 향하도록 정렬합니다.
-
엔진을 끄고 키를 뺍니다.
-
모든 움직임이 멈출 때까지 기다린 다음 운전석에서 내립니다.
-
스프레이어를 세척합니다. 장비 사용 설명서의 스프레이어 세척을 참조하십시오.
-
장비의 부품을 식힙니다.
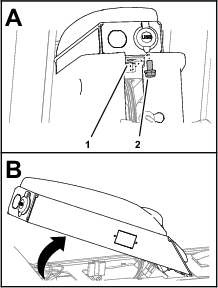
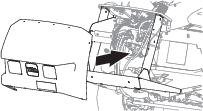
후드 분리
-
헤드라이트 전구의 커넥터에서 장비 와이어 하니스 헤드라이트 커넥트를 제거합니다(그림 59).
-
다른 헤드라이트에서 1 단계를 반복합니다.
-
장비에 후드 하단 플랜지를 고정하는 4개의 푸시인 패스너를 제거합니다(그림 60).

-
장비의 하단 플랜지를 고정하는 플랜지 헤드 볼트(5/16 x 1 인치) 2개를 제거합니다(그림 60).
-
대시 지지대의 후드를 고정하는 필립스 팬 헤드 나사(1/4 x 1 인치) 4개를 제거합니다(그림 61).

-
대시 지지대에 후드를 고정하는 푸시인 패스너 2개를 제거합니다(그림 61).
-
장비에서 후드를 분리합니다(그림 62).
Note: 후드, 플랜지 헤드 볼트 2개, 필립스 팬 헤드 나사 4개를 따로 보관하십시오.

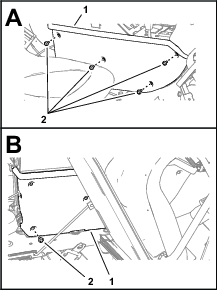
발열 보호대와 언더캐리지 측판 제거
장착된 경우, 장비 하부에서 발열 보호대와 측판을 제거합니다. 장비의 사용 설명서를 참조하십시오.
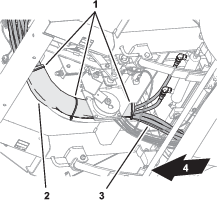
스티어링 밸브 호스 제거
이 절차를 수행하는 데 필요한 부품:
| 캡 | 1 |
호스 지지 클램프 제거
-
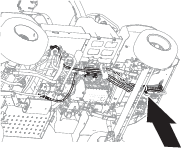
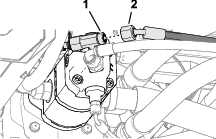
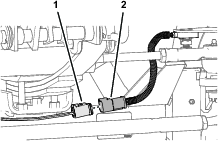
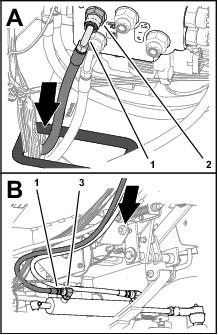
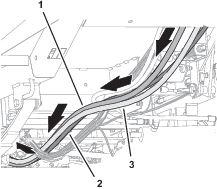
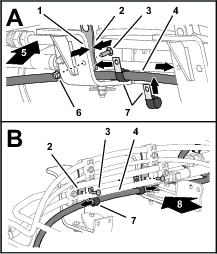
바닥판 아래에서 클러치 플레이트에 유압 호스를 지탱하는 클램프를 고정하는 너트(1/4 인치), 록너트(1/4 인치), 와셔(3/8 x 7/8 인치), 캡나사(1/4 x 7/8 인치)를 제거하고 클램프를 분리합니다(그림 63).
-
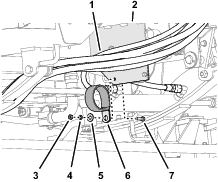
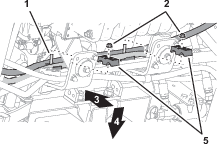
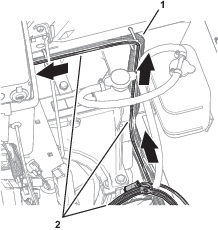
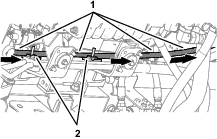
엔진 마운트에 스티어링 밸브의 반환 호스를 지탱하는 클램프 2개를 고정하는 플랜지 록너트(5/16 인치), 캐리지 볼트(5/16 x 1 인치), 캐리지 볼트(5/16 x 1 1/2 인치)를 제거한 다음 클램프를 분리합니다(그림 64).
-
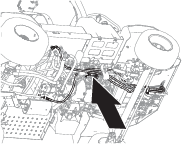
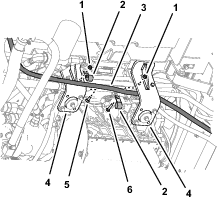
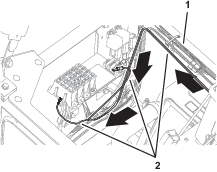
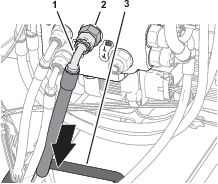
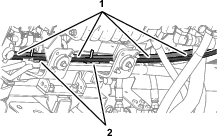
그림 65과 같이 상단 튜브 클램프 해프 2개를 고정하는 플랜지 록너트(5/16)을 제거한 다음 클램프 해프를 분리합니다.
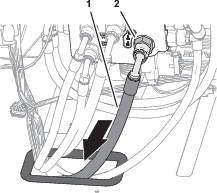
스티어링 밸브용 반환 호스 제거
스티어링 밸브용 압력 호스 제거
스티어링 실린더 호스 제거
-
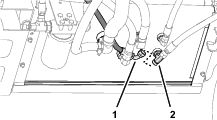
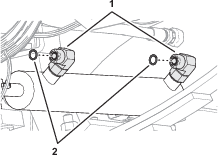
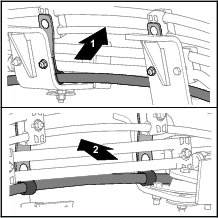
스티어링 실린더의 확장 및 수축 포트에 있는 90° 피팅에서 스티어링 실린더 호스를 제거합니다(그림 73).

-
장비에서 스티어링 실린더 호스를 제거합니다.
Note: 스티어링 실린더 호스를 폐기합니다.
EHI 스티어링 밸브 설치
이 절차를 수행하는 데 필요한 부품:
| 매니폴드 마운트 | 1 |
| 플랜지 헤드 캡나사(1/4 x 1/2 인치) | 2 |
| 와셔(¼ 인치) | 2 |
| 플랜지 록너트(¼ 인치) | 2 |
| U 볼트(3/8 인치) | 2 |
| 플랜지 록너트(⅜ 인치) | 4 |
| 모델/일련번호 | 1 |
| EHI 스티어링 밸브 | 1 |
| 직선형 유압 피팅(-6 x 12 mm) | 2 |
| 직선형 유압 피팅(-8 x 22 mm) | 4 |
| 직선형 유압 피팅(-6 x 18 mm) | 4 |
| 플랜지 헤드 캡나사(8 x 16 mm) | 3 |
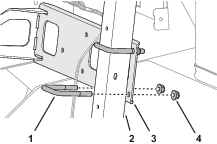
매니폴드 마운트 장착
-
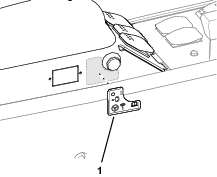
그림 74와 같이 장비 전면에 매니폴드 마운트를 정렬합니다.

-
보관함 플랜지의 슬롯과 매니폴드 마운트 구멍을 정렬합니다(그림 75).
Note: 와이어 하니스가 마운트 및 보관함 사이의 끼이지 않도록 하십시오.
-
플랜지 헤드 캡나사(1/4 x 1/2 인치) 2개 및 와셔(1/4 인치), 2개, 플랜지 록너트(1/4 인치) 2개를 이용하여 매니폴드 마운트를 풀랜지(그림 75)에 느슨하게 조립합니다.
-
U 볼트(3/8 인치) 및 플랜지 록너트(3/8 인치)를 사용하여 대시 지지 튜브(그림 76)에 매니폴드 마운트를 느슨하게 조립합니다.
-
캡나사, U 볼트, 록너트를 조입니다.
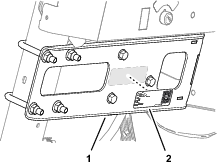
모델/일련번호 부착
-
모델/일련번호 데칼의 후면을 제거합니다.
-
그림 77과 같이 매니폴드 마운트에 데칼을 부착합니다.
EHI 스티어링 밸브 준비

콘솔 베이스에 구멍 뚫기
이 절차를 수행하는 데 필요한 부품:
| 그로밋 | 1 |
-
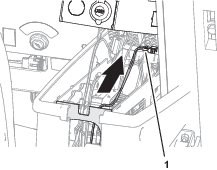
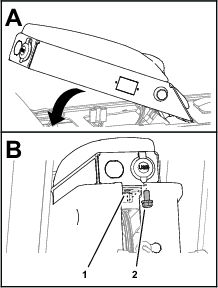
콘솔 베이스에 액세스하기 위하여 승객 시트를 앞으로 기울입니다(그림 82).

-
베이스와 베이스 하부의 와이어 하니스 사이에 있는 콘솔 베이스 받침대 슬롯을 통해 약 120 mm 폭의 판금 피스를 정렬합니다.
Note: 판금은 콘솔 베이스에 구멍을 뚫을 때 와이어 하니스를 보호합니다.
-
콘솔 베이스의 받침대 슬롯 사각형 구멍에서 뒤쪽으로 69 mm를 측정한 다음 콘솔 베이스에 표시합니다(그림 83).
-
콘솔 베이스의 구멍 뚫린 플랜지에서 안쪽으로 45 mm를 측정한 다음 콘솔 베이스에 표시합니다(그림 83).
-
마크 교차점의 콘솔 베이스 중심을 펀칭합니다.
-
32 mm 드릴 비트로 콘솔 베이스의 중심 펀칭 마크에 드릴로 구멍을 뚫습니다()그림 83.
-
판금 피스를 제거한 다음 구멍 주변의 자국을 제거합니다.
-
구멍에 그로밋을 설치합니다그림 84
전기 하니스 설치
이 절차를 수행하는 데 필요한 부품:
| 2-위치 스위치 | 1 |
| 이동 데칼 | 1 |
| 와이어 하니스 | 1 |
| 케이블 타이 | 7 |
| 퓨즈(10 A) | 1 |
| 푸시 버튼 스위치, 잼 너트 및 록와셔 | 1 |
| AutoSteer 원격 체결 데칼 | 1 |
로드 스위치를 대시 패널에 조립
대시 패널에 와이어 하니스 배선하기
-
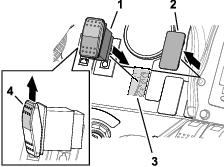
장비 전면에서 바닥판 바닥을 통해 다음 라벨로 와이어 하니스 커넥터를 배선합니댜(그림 90).

-
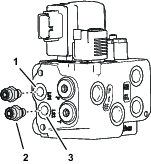
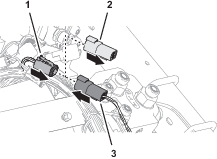
라벨이 부착된 와이어 하니스 커넥터를 EHI 스티어링 밸브의 12-핀 커넥터에 끼웁니다(그림 91).

-
라벨이 부착된 2-소켓 와이어 하니스 커넥터를 EHI 솔레노이드의 2-핀 커넥터에 끼웁니다(그림 91).
-
라벨이 부착된 4-소켓 커넥터 GeoLink 와이어 하니스의 캡을 제거합니다(그림 92).
-
라벨이 부착된 키트 와이어 하니스의 4-핀 커넥터를 라벨이 부착된 4-소켓 커넥터에 끼웁니다(그림 92).
-
라벨이 부착된 카트 와이어 하니스의 8-소켓 커넥터를 로드 스위치를 대시 패널에 조립에서 설치한 2-위치 스위치에 끼웁니다(그림 93).
운전자 플랫폼 아래에 와이어 하니스 배선
휠 각도 센서 연결
-
라벨이 부착된 키트 와이어 하니스의 6-소켓 커넥터에 각도 센서 하니스의 6-핀 커넥터를 끼웁니다(그림 96).
-
케이블 타이 2개로 차축 튜브에 휠 각도 센서의 하니스와 키트 와이어 하니스의 각도 센서 브랜치를 고정합니다.
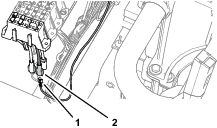
와이어 하니스를 접지 블록과 퓨즈 블록에 연결
-
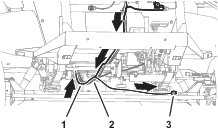
장비 와이어 하니스를 따라서 라디에이터 상단에 걸쳐 및 라벨이 부착된 단자에 와이어 하니스 브랜치를 배선합니다(그림 97).
-
접지 블록에서 단자 나사를 제거합니다(그림 98).
-
단자 나사를 사용하여 지면에 대한 라벨이 부착된 키트 와이어 하니스의 링 단자를 조립합니다(그림 98).
-
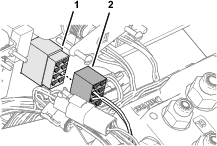
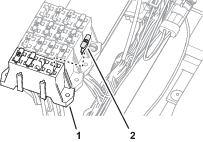
퓨즈 블록의 옵션 전원에 대한 블레이드 커넥트에 라벨이 부착된 키트 와이어 하니스를 끼웁니다(그림 99).
Note: 장비의 퓨즈 블록에 사용 가능한 옵션 전원 회로가 없는 경우, 추가 옵션 퓨즈 블록을 설치합니다. Toro 공인 판매대리점에 문의하십시오.
-
4 단계에서 사용된 옵션 전원 회로에 대한 퓨즈 블록 소켓(그림 100)에 퓨즈(10 A)를 끼웁니다.
-
케이블 타이 4개로 장비 와이어 하니스에 스위치 모든 전원 및 접진 브랜치를 고정합니다.
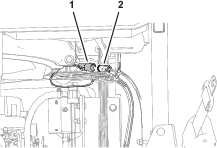
원격 체결 커넥터 연결
라벨이 부착된 GeoLink 와이어 하니스의 2-소켓 커넥터에 라벨이 부착된 키트 와이어 하니스의 2-핀 커넥터를 끼웁니다(그림 101).
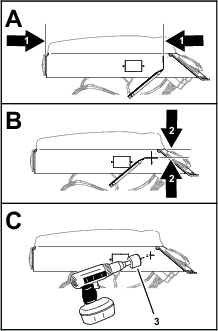
팔걸이 제거
팔걸이에 구멍 뚫기
와이어 하니스를 원격 체결 스위치에 배선
-
에서 설치한 그로밋()을 통해 그림 106원격 체결 스위치콘솔 베이스에 구멍 뚫기 라벨이 부착된 와이어 하니스 브랜치를 배선합니다.
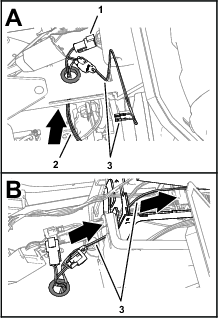
-
중앙 콘솔에 원격 체결 스위치 라벨이 부착된 와이어 하니스 브랜치를 배선합니다(그림 106).
-
암 패널을 향해 원격 체결 스위치 라벨이 부착된 와이어 하니스 브랜치를 배선합니다(그림 107).
-
푸시 버튼 스위치의 단자에 원격 체결 스위치 라벨이 부착된 와이어 하니스 브랜치 단자를 조립합니다(그림 108).
-
케이블 타이로 장비 와이어 하니스에 와이어 하니스 브랜치를 고정합니다.
콘솔 프레임에 암 패널 조립
스티어링 밸브 O-링 교체
호스 설치
이 절차를 수행하는 데 필요한 부품:
| 호스 6 x 203 mm; -6(직선형) 및 -6(45°) 피팅 | 1 |
| O-링 12.4/1.8 mm | 2 |
| 호스 6 x 2819 mm(1/4 x 111 인치); -4(90°직선형) 및 -6(90°) 피팅 | 1 |
| 호스 6 x 673 mm(1/4 및 x 26 1/2 인치); -4(직선형) 및 -6(90°) 피팅 | 1 |
| 호스 6 x 711 mm(1/4 x 28 인치); -4(직선형) 및 -6(90°) 피팅 | 1 |
| 호스 10 x 187 mm(3/8 x 7 3/8 인치); -6(직선형) 및 -8(90°) 피팅 | 1 |
| 호스 10 x 264 mm(3/8 및 x 10 3/8 인치); -8(90°) 및 -6(45°) 피팅 | 1 |
| O-링 9.2/1.8 mm | 2 |
| 호스 6 x 1397 mm(1/4 x 55 인치); -6(직선형) 및 -6(90°) 피팅 | 1 |
| 호스 6 x 1270 mm(1/4 x 50 인치); -6(직선형) 및 -6(90°) 피팅 | 1 |
| 호스 10 x 2921 mm(3/8 x 115 인치); -8(90°) 및 -8(90°) 피팅 | 1 |
| O-링 7.6/1.8 mm | 1 |
| 케이블 타이 | 3 |
스티어링 밸브 호스 제거
-
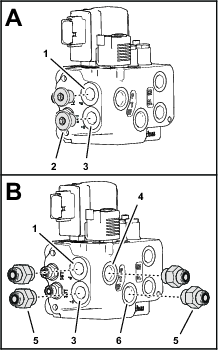
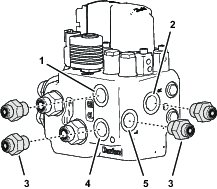
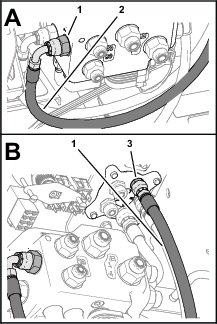
EHI 스티어링 밸브의 포트 LS2 피팅에 호스 6 x 203 mm의 45° 피팅을 조립합니다(그림 113).
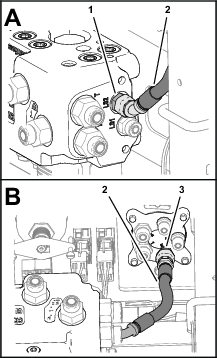
-
스티어링 밸브의 포트 E 피팅에 호스 6 x 203 mm의 직선형 피팅을 조립한 다음 호스 피팅을 모두 조입니다(그림 113).
-
바닥판 그로밋을 통해 -4, 90° 피팅과 유압 호스 6 x 2819 mm 단부를 배선합니다(그림 114).
-
EHI 스티어링 밸브의 포트 LS1 피팅에 호스 6 x 2819 mm의 -6, 90° 피팅을 조립한 다음 호스 피팅을 조입니다(그림 114).
-
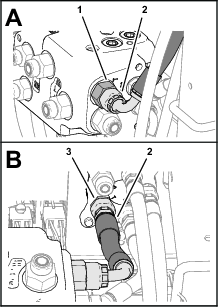
EHI 스티어링 밸브의 포트 R 피팅에 호스 6 x 673 mm의 90° 피팅을 조립합니다(그림 115).
-
스티어링 밸브의 포트 R 피팅에 호스 6 x 673 mm의 직선형 피팅을 조립한 다음 호스 피팅을 모두 조입니다(그림 115).
-
EHI 스티어링 밸브의 포트 L 피팅에 호스 6 x 711 mm의 90° 피팅을 조립합니다(그림 116).
-
스티어링 밸브의 포트 L 피팅에 호스 6 x 711 mm의 직선형 피팅을 조립한 다음 호스 피팅을 모두 조입니다(그림 116).
-
EHI 스티어링 밸브의 포트 T 피팅에 호스 10 x 187 mm의 90° 피팅을 조립합니다(그림 117).
-
스티어링 밸브의 포트 T 피팅에 호스 10 x 187 mm의 직선형 피팅을 조립한 다음 호스 피팅을 모두 조입니다(그림 117).
-
EHI 스티어링 밸브의 포트 P 피팅에 호스 10 x 264 mm의 90° 피팅을 조립합니다(그림 118).
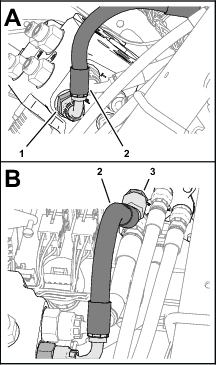
-
스티어링 밸브의 포트 P 피팅에 호스 10 x 264 mm의 45° 피팅을 조립한 다음 호스 피팅을 모두 조입니다(그림 118).
스티어링 실린더 호스 설치
-
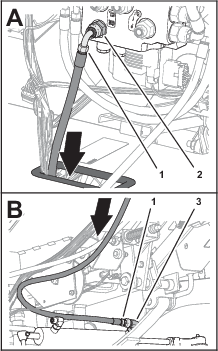
바닥판 그로밋을 통해 직선형 피팅으로 호스 6 x 1397 mm 단부를 배선합니다(그림 119).
-
EHI 스티어링 밸브의 포트 CR 피팅에 호스 6 x 1397 mm의 90° 피팅을 조립합니다(그림 119).
-
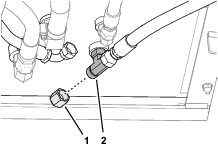
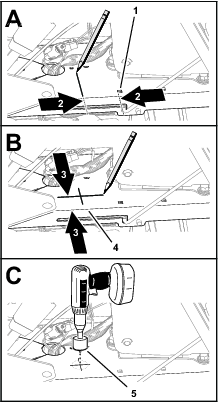
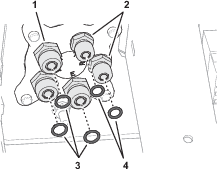
스티어링 실린더의 확장 및 수축 포트에 있는 90° 피팅 전방에서 O-링 2개를 제거합니다(그림 120).
Note: O-링을 폐기합니다.
-
새로운 O-링 9.2/1.8 mm 2개를 90° 피팅의 홈에 설치합니다(그림 120).
-
스티어링 실린더의 수축 포트에 호스 6 x 1397 mm의 직선형 피팅을 조립한 다음 호스 피팅을 모두 조입니다(그림 119).
-
바닥판 그로밋을 통해 직선형 피팅으로 호스 6 x 1270 mm 단부를 배선합니다(그림 121).
-
EHI 스티어링 밸브의 포트 CL 피팅에 호스 6 x 1270 mm의 90° 피팅을 조립합니다(그림 121).
-
스티어링 실린더의 확장 포트에 호스 6 x 1270 mm의 직선형 피팅을 조립한 다음 호스 피팅을 조입니다(그림 121).
EHI 스티어링 밸브에 탱크 반환 호스 및 유압 펌프 호스를 조립합니다.
-
피팅(90°) 2개로 달린 탱크 반환 호스 10 x 2921 mm를 식별합니다.
-
바닥판 그로밋을 통해 탱크 반환 호스 10 x 2921 mm 단부를 배선합니다(그림 122).
-
EHI 스티어링 밸브의 포트 EF 피팅에 탱크 반환 호스 10 x 2921 mm의 90° 피팅을 조립한 다음 호스 피팅을 조입니다(그림 122).
-
90° 피팅 및 45° 피팅이 달린 유압 펌프 호스 10 x 2921 mm를 식별합니다.
-
바닥판 그로밋을 통과하여 45° 피팅과 유압 펌프 호스 10 x 2921 mm 단부를 배선합니다(그림 123).
-
EHI 스티어링 밸브의 포트 PT 피팅에 유압 펌프 호스 10 x 2921 mm의 90° 피팅을 조립한 다음 호스 피팅을 조입니다(그림 123).
-
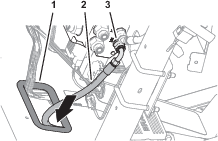
장비의 우측 프레임 튜브를 따라서 유압 펌프 호스 및 탱크 반환 호스를 뒤쪽으로 배선합니다(그림 124).
유압 펌프 호스 배선
-
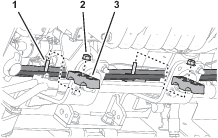
상단 위치에 있는 튜브 클램프 해프의 상단 홈에 45° 피팅과 유압 펌프 호스 10 x 2921 mm(EHI 스티어링 밸브 포트 PT)를 배선합니다(그림 125).
-
유압 호스 방향으로 호스의 45° 피팅을 배선합니다.
-
상단 위치에 있는 튜브 클램프 해프의 하단 홈에 90° 피팅과 유압 펌프 호스 6 x 2819 mm(EHI 스티어링 밸브 포트 LS1)를 배선합니다(그림 126).
-
유압 호스 방향으로 호스의 90° 피팅을 배선합니다.
-
캡나사의 튜브 클램프 해프 2개를 조립하고 플랜지 헤드 록나사(5/16 인치)로 튜브 클램프 해프와 호스(그림 127)를 고정합니다.
유압 탱크 반환 호스 설치
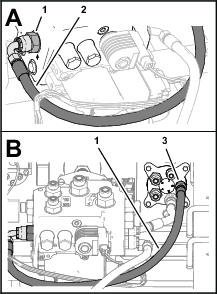
-
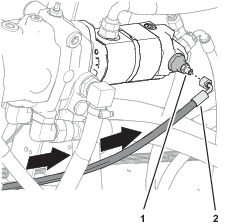
우측 엔진 마운트 브래킷 상단에 걸쳐 탱크 반환 호스 6 x 2819 mm를 배선합니다(그림 128).
-
그림 128와 같이 호스에 P-클팸프 2개를 조립합니다.
-
튜브 클램프 마운트 플레이트 및 엔진 마운트 브래킷 사이에 P-클팸프 2개를 정렬합니다(그림 128).
-
캐리지 볼트(5/16 x 1 인치) 2개 및 플랜지 록너트(5/16 인치) 2개로 엔진 마운트 브래킷(그림 128 및 그림 129)에 클램프 마운트 플레이트 및 P-클팸프를 고정합니다.
-
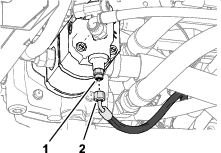
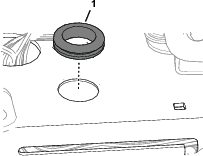
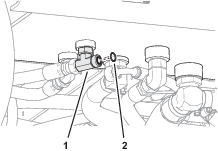
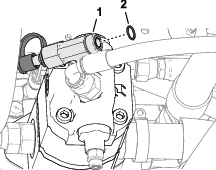
유압 탱크의 T형 피팅 전면에서 O-링을 제거합니다(그림 130).
Note: O-링을 폐기합니다.
-
새로운 O-링 12.4/1.8 mm를 T형 피팅의 홈에 설치합니다(그림 130).
-
T형 피팅에 탱크 반환 호스 6 x 2819 mm의 90° 피팅을 조립한 다음 호스 피팅을 조입니다(그림 131).
유압 펌프 호스 설치
-
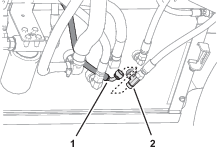
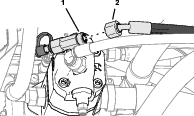
유압 펌프 단부의 T형 피팅 전면에서 O-링을 제거합니다(그림 132).
Note: O-링을 폐기합니다.
-
새로운 O-링 12.4/1.8 mm를 T형 피팅의 홈에 설치합니다(그림 132).
-
T형 피팅에 호스 10 x 2921 mm의 45° 피팅을 조립한 다음 호스 피팅을 조입니다(그림 133).
-
유압 펌프 단부의 직선형 피팅 전면에서 O-링을 제거합니다(그림 134).
Note: O-링을 폐기합니다.
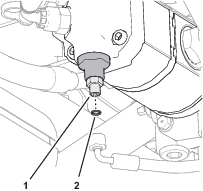
-
새로운 O-링 7.6/1.8 mm를 직선형 피팅의 홈에 설치합니다(그림 134).
-
직선형 피팅에 호스 6 x 2819 mm의 90° 피팅을 조립한 다음 호스 피팅을 조입니다(그림 135).
하단 호스 커버 설치
-
바닥판 아래에서, 그림 136에서 제거한 지지 클램프, 캡나사(1/4 x 7/8 인치), 너트(1/4 인치), 록워셔(1/4 인치), 와셔(3/8 x 7/8 인치)를 사용하여 호스 지지 클램프 제거와 같이 클러치와 클러치 플레이트에 호스와 와이어 하니스를 고정합니다.

-
하단 호스 커버를 스티어링 호스 위에 조립합니다(그림 137).
-
케이블 타이 3개로 호스에 커버를 고정합니다(그림 137).
유압 시스템에서 공기 퍼징
-
엔진을 시동합니다.
-
바퀴가 부드럽게 회전할 때까지 스티어링 휠을 좌우로 완전히 돌립니다.
-
엔진을 끄고 키를 뺍니다.
유압 누출 여부 점검
-
EHI 스티어링 밸브와 스티어링 밸브에서 유압 오일이 누출되는지 호스와 피팅을 점검합니다.
Important: 호드를 설치하기 전에 모든 누출 부위를 수리합니다.
-
유압 탱크 및 유압 펌프에서 누출이 있는지 호스와 피팅을 점검합니다.
Important: 모든 누출 부위를 수리합니다.
후드 설치
이 절차를 수행하는 데 필요한 부품:
| 푸시인 패스너 | 6 |
-
장비의 섀시 구성과 후드 구멍을 맞춥니다(그림 139).
-
푸시인 패스너 2개로 대시 패널 지지대에 후드를 조립합니다(그림 140).
-
필립스 팬 헤드 나사(1/4 x 1 인치) 4개로 대시 패널 지지대에 후드를 고정합니다(그림 140).
-
푸시인 패스너 4개로 장비에 후드의 바닥 플랜지를 조립합니다(그림 141).

-
플랜지 헤드 캡나사(5/16 x 3/4 인치) 2개를 사용하여 장비에 플랜지를 고정합니다(그림 141).
-
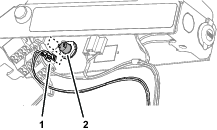
헤드라이트 전구의 커넥터에 장비 와이어 하니스의 헤드라이트 커넥터를 조립합니다(그림 142).
-
다른 헤드라이트에서 6 단계를 반복합니다.
발열 보호대와 언더캐리지 측판 설치
제거된 경우, 장비 하부에 발열 보호대와 언더캐리지 측판을 설치합니다. 장비의 사용 설명서를 참조하십시오.
소프트웨어 설정 및 보정
콤파스 보정
GeoLink 콤파스를 보정합니다. 장비에 대한 X25 GeoLink 사용 설명서를 참조하십시오.
장비 보정 준비
설치자가 제공하는 장치: USB/CAN 인터페이스 케이블(Toro 진단 케이블) 부품 번호 115-1944
-
평평한 잔디밭 위에 장비를 주차합니다.
-
엔진을 끄고 주차 브레이크를 체결합니다.
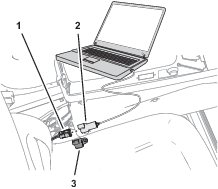
장비에 노트북 연결
Note: 소프트웨어 보정을 위하여 정비에 노트북을 연결하기 전에 다음 절치를 완료해야 합니다.
-
Toro 진단 애플리케이션이 노트북에서 실행될 경우, Toro 진단 애플리케이션을 종료합니다.
Important: Toro 진단 애플리케이션이 노트북에서 실행되는 경우, 보정 절차를 시작하지 마십시오.
-
노트북의 USB 포트에 USB/CAN 인터페이스 케이블을 끼웁니다.
-
장비에서 ON(켜짐) 위치로 키를 돌립니다.
-
Windows 작업창에서 (검색) 아이콘을 클릭합니다(그림 143).
-
(검색하려면 여기에 입력) 텍스트 박스에서 를 입력한 다음 Enter 키를 누릅니다(그림 143).
-
PVED-CLS_2.00_rev_D.P1D 아이콘을 클릭합니다(그림 143).
Note: Plus+1 정비 도구 애플리케이션이 노트북에 표시됩니다(그림 144).
-
DUPLICATE DIAG CONNECTOR(이중 진단 커넥터) 라벨이 부착된 키트 와이어 하니스 CAN 포트의 3-소켓 커넥터에서 캡을 제거하고 3-소켓 커넥터에 3-핀 커넥터 인터페이스 USB/CAN 인터페이스 케이블을 끼웁니다(그림 145).
-
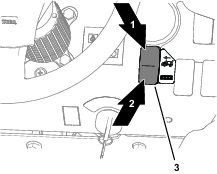
장비의 대시 패널에서 활성화/이동 스위치를 ENABLE MODE(활성화 모드) 위치로 누릅니다(그림 146).
-
노트북에서 PVED-CLS_2.00_REV_D.P1D 파일을 클릭합니다.
-
System Navigator(시스템 검색) 탭에서 AUTO CALIBRATION(자동 보정) 디렉터리를 검색한 다음 +를 클릭합니다(그림 147).
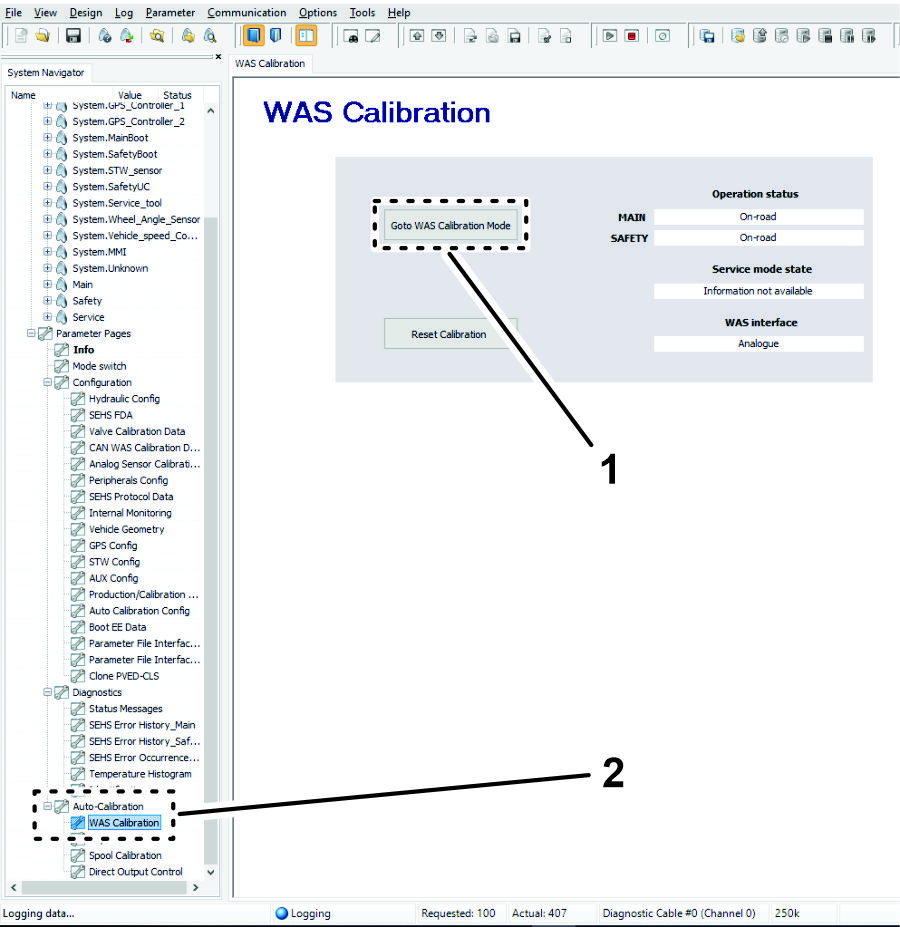
-
WAS CALIBRATION(WAS 보정) 아이콘을 클릭합니다(그림 147).
스티어링 값 캡처하기
-
장비의 엔진을 시동합니다.
-
WAS CALIBRATION(WAS 보정) 화면에서 GOTO WAS CALIBRATION MODE(WAS 보정 모드로 이동) 아이콘을 클릭합니다(그림 147).
-
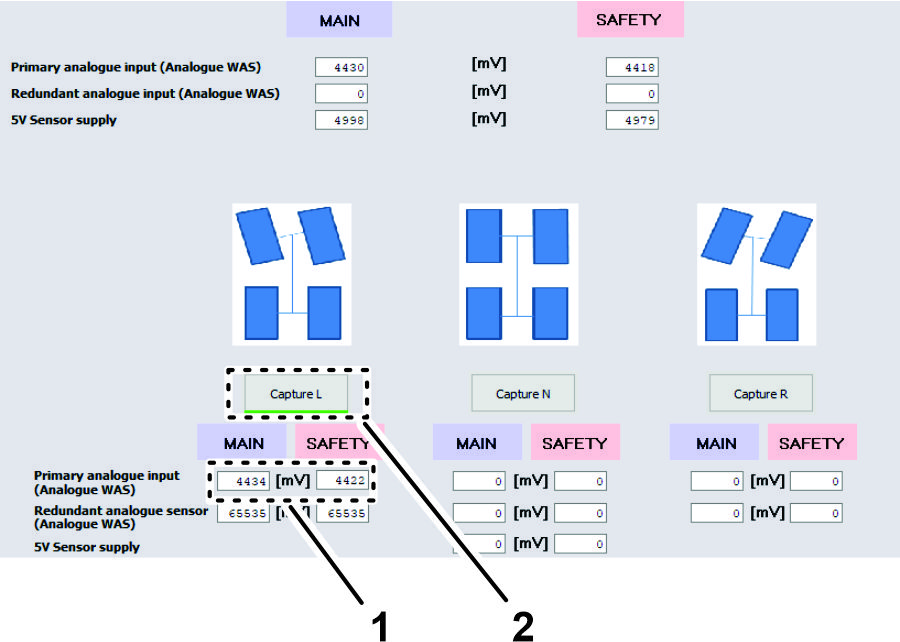
스티어링 휠을 왼쪽으로 완전히 돌린 다음 정지합니다.
-
CAPTURE L(L 캡처) 아이콘을 클릭합니다(그림 148).
Note: 스티어링 휠을 돌릴 때 센서 값이 변합니다.
-
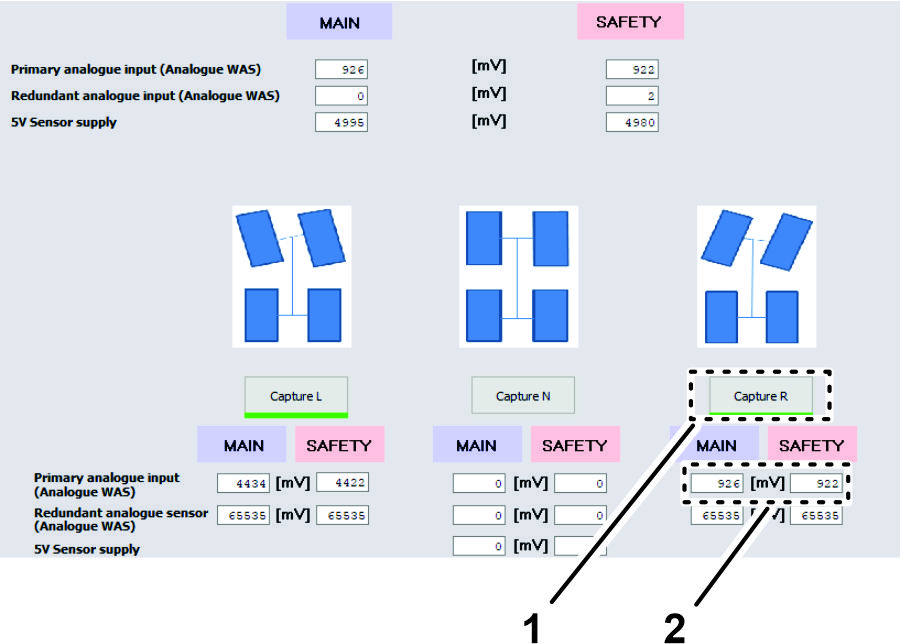
스티어링 휠을 오른쪽으로 완전히 돌린 다음 멈춥니다.
-
CAPTURE R(R 캡처) 아이콘을 클릭합니다(그림 149).
Note: 스티어링 휠을 돌릴 때 센서 값이 변합니다.
-
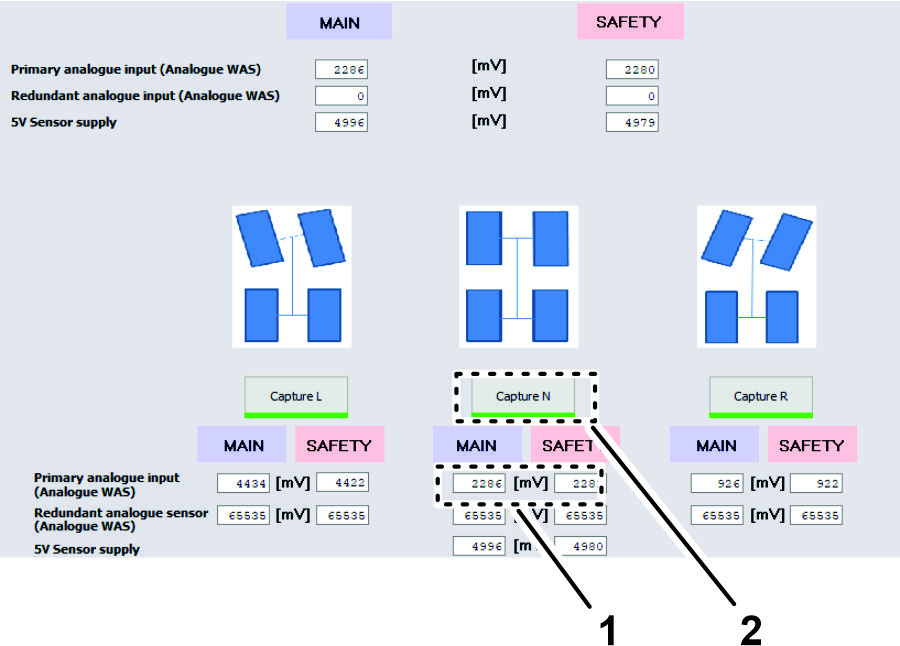
타이어를 앞으로 똑바로 정렬할 때까지 스티어링 휠을 돌린 다음 멈춥니다.
-
CAPTURE N(N 캡처) 아이콘을 클릭합니다(그림 150).
Note: 스티어링 휠을 돌릴 때 센서 값이 변합니다.
-
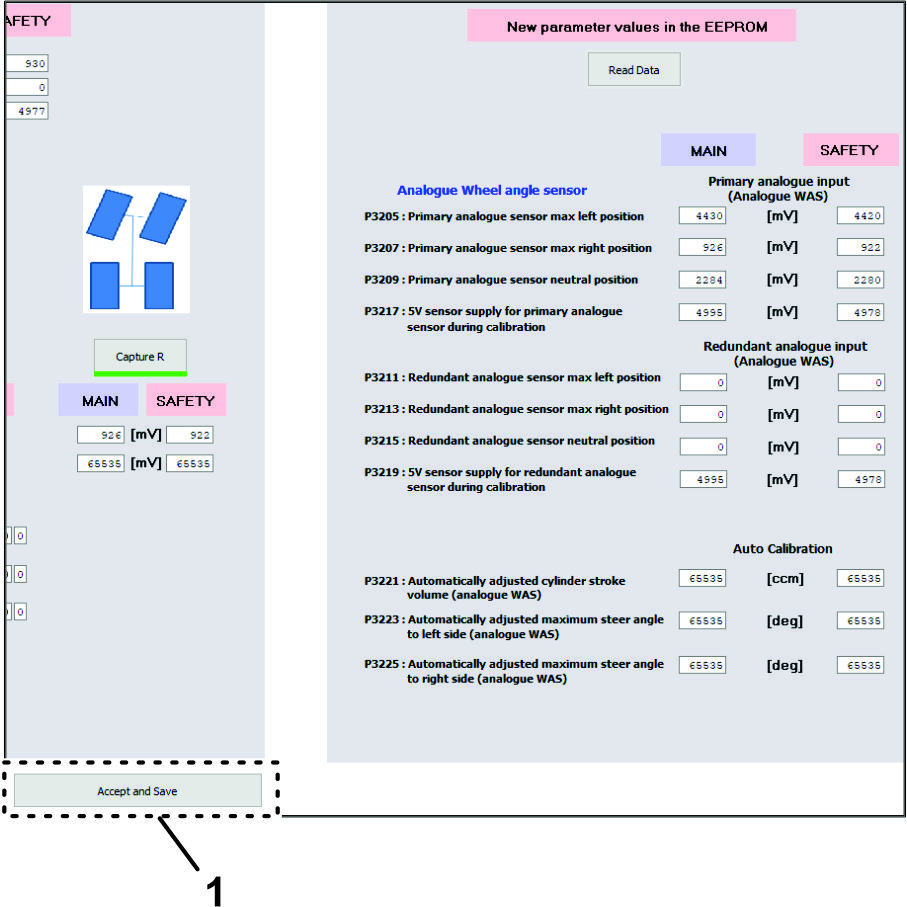
ACCEPT AND SAVE(수락 및 저장) 아이콘을 클릭합니다(그림 151).
스풀 보정 프로세스 실행
-
앞타이어가 똑바로 되도록 스티어링 휠을 돌립니다.
-
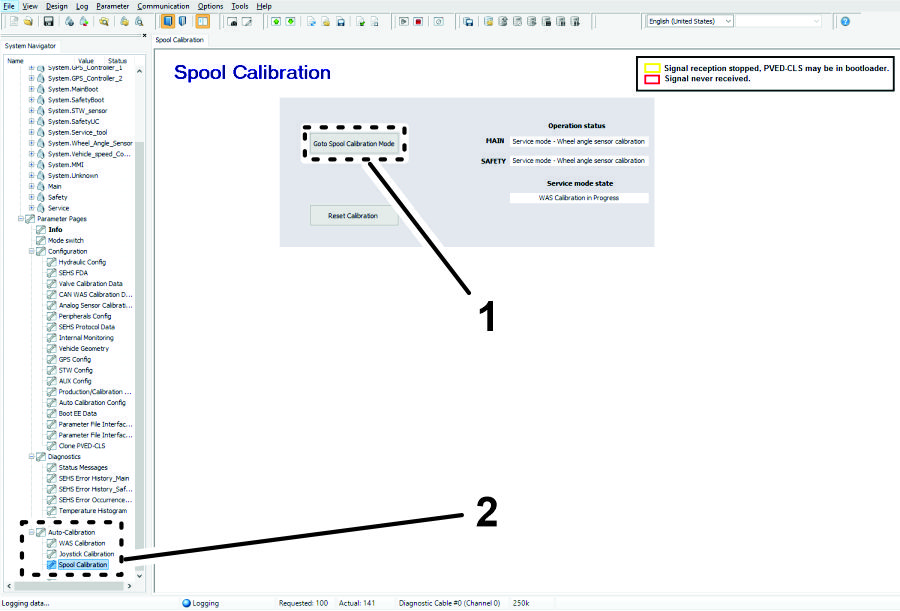
노트북에서 SPOOL CALIBRATION(스풀 보정) 아이콘을 클릭합니다(그림 152).
-
스풀 보정 페이지에서 GOTO SPOOL CALIBRATION MODE(스풀 보정 모드로 이동) 아이콘을 클릭합니다(그림 152).
-
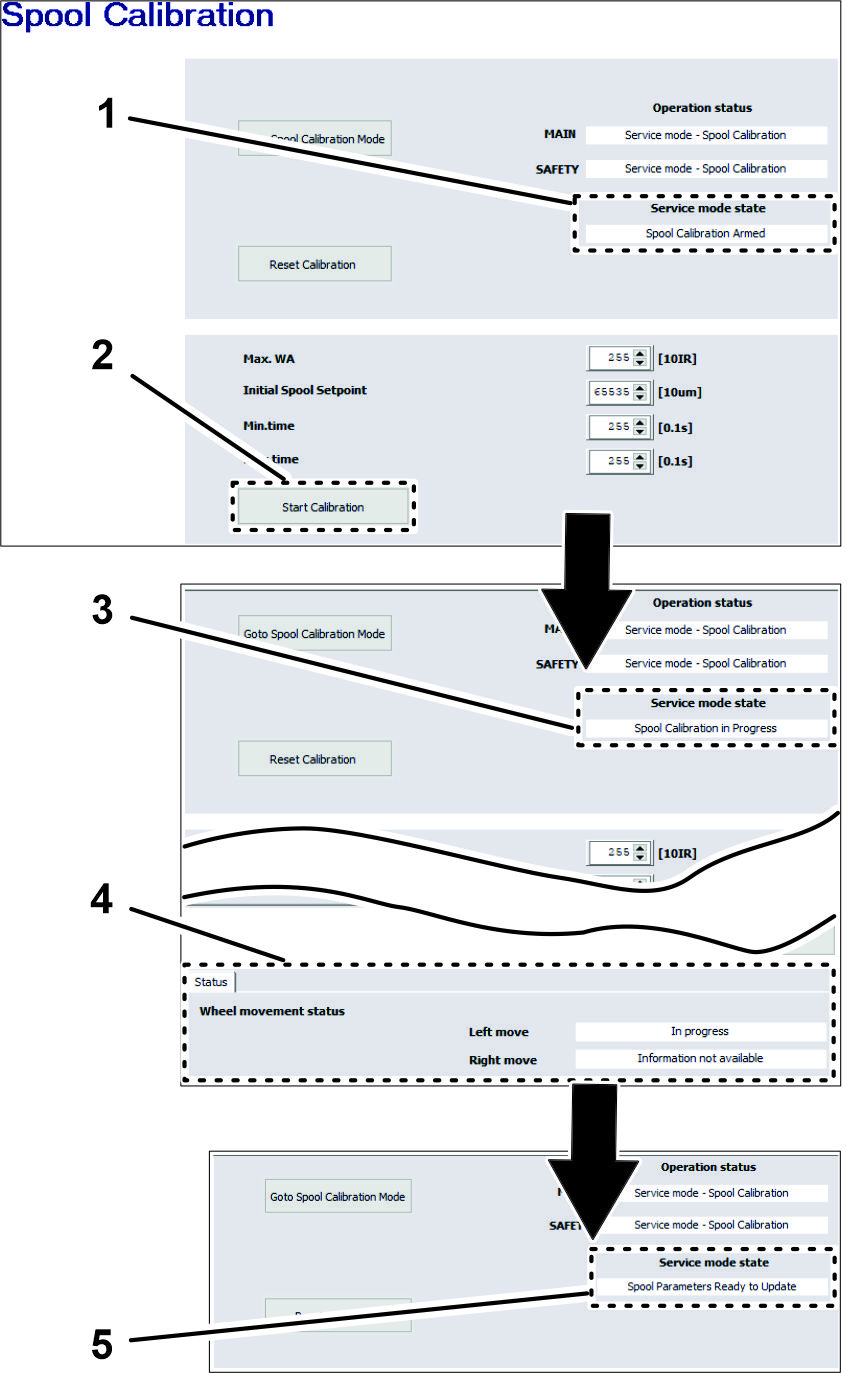
START CALIBRATION(보정 시작) 아이콘을 클릭합니다(그림 153).
Note: 보정을 시작하기 전에 정비 모드 상태에는 Spool Calibration Armed(스풀 보정 준비 완료)가 표시되어야 합니다.
Important: 스티어링 휠을 만지지 마십시오.
스풀 보정이 진행되면서 스티어링 휠이 움직입니다. 스풀 보정 프로세스에서 몇 분 정도 걸립니다. Status(상태) 탭에서 휠 동작 상태가 변경됩니다. 정비 모드 상태 필드에 SPOOL PARAMETERS READY TO UPDATE(스풀 매개변수를 업데이트할 준비 완료)가 표시되면 보정이 완료됩니다.
-
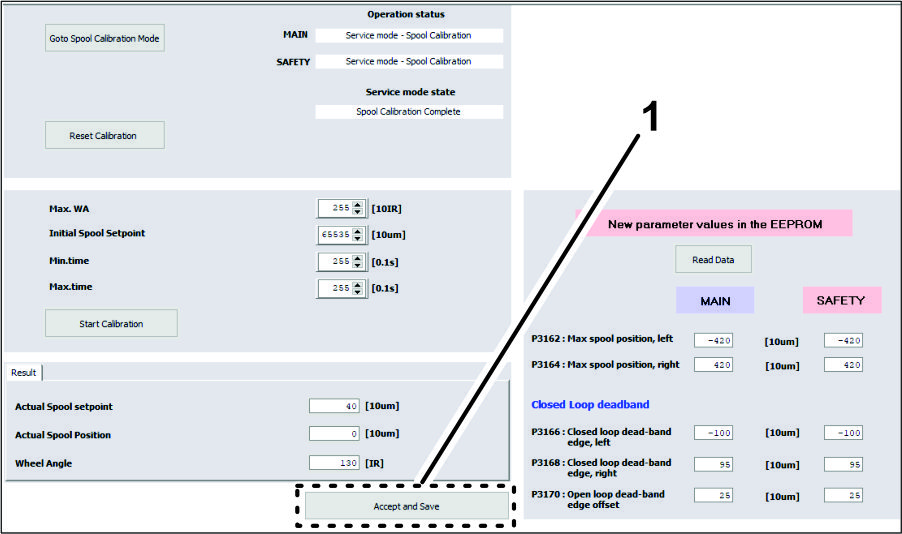
스풀 보정 화면 하단에서 ACCEPT AND SAVE(수락 및 저장) 아이콘을 클릭하니다(그림 154).
-
엔진을 끕니다.
-
키트 와이어 하니스의 커넥터에서 USB/CAN 인터페이스 케이블 커넥터를 분리한 다음 와이어 하니스 커넥터의 캡을 설치합니다(그림 155).
AutoSteer 활성화
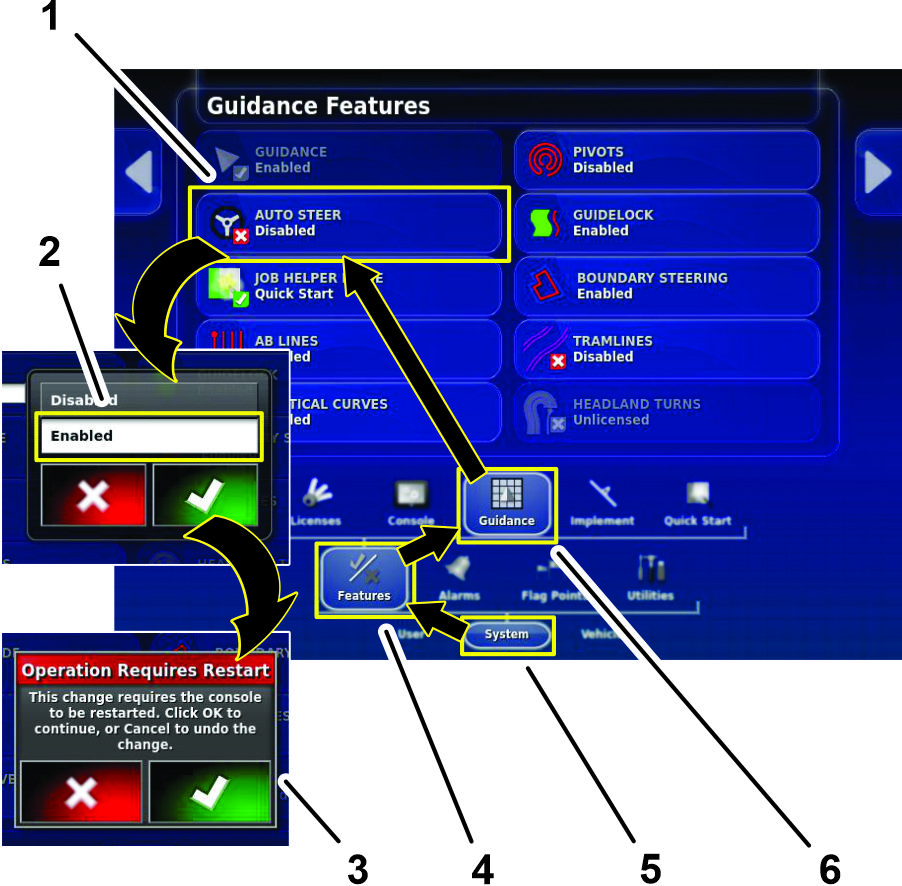
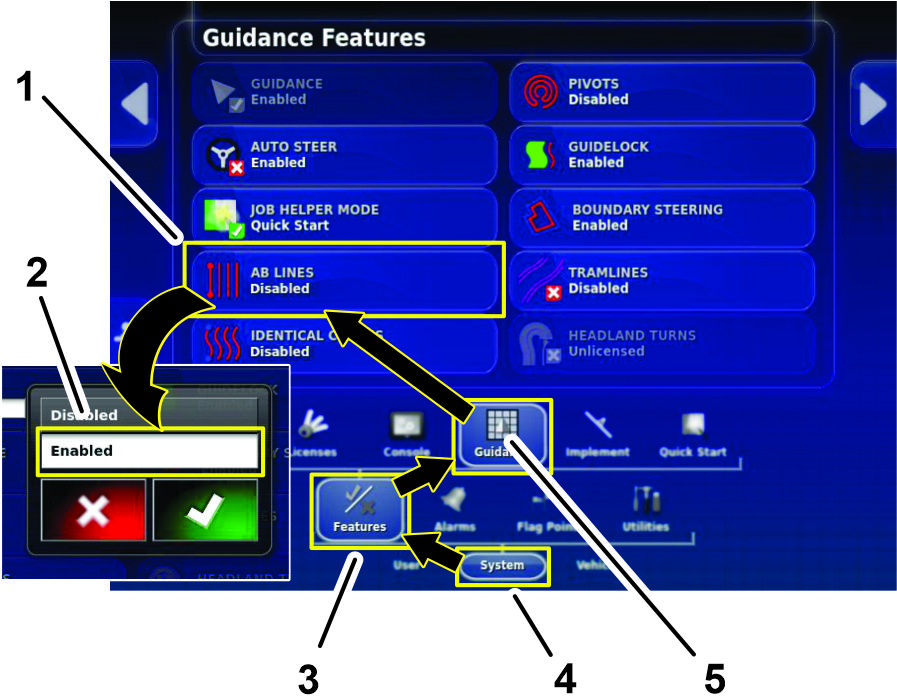
AB 라인 활성화
스티어링 체결 값 설정
-
설정 화면에서 USER(사용자) 아이콘으 누른 다음 ACCESS LEVEL(액세스 레벨) 아이콘을 누릅니다(그림 158).
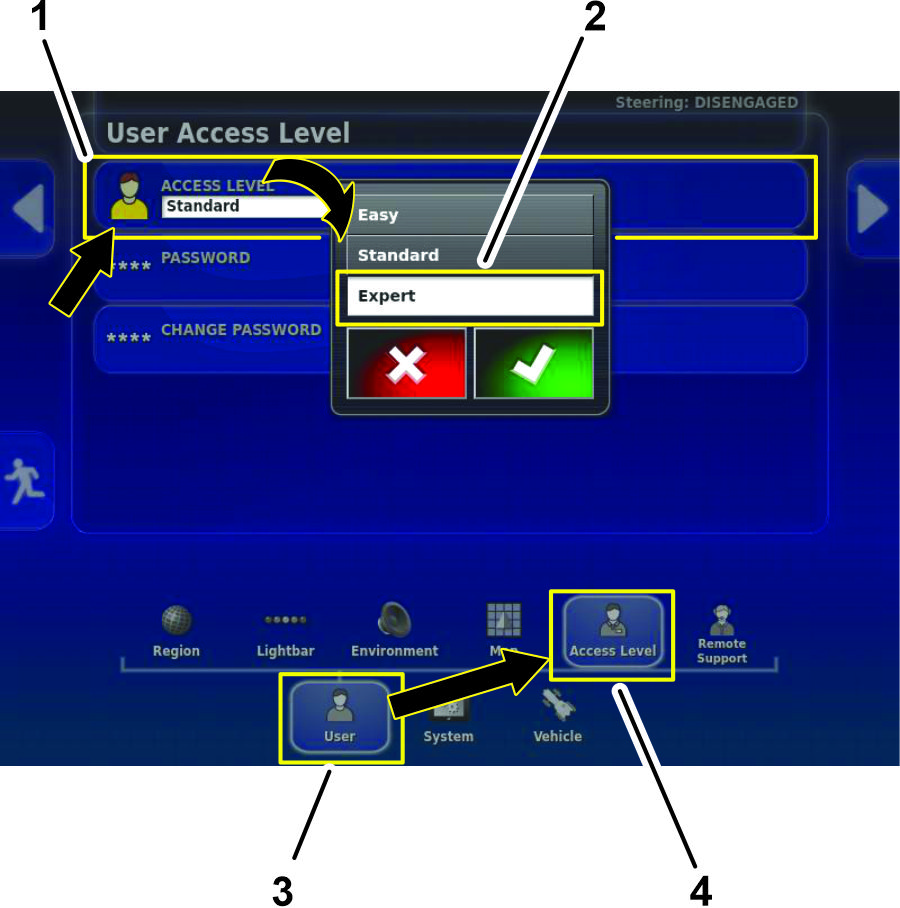
-
사용자 액세스 화면에서 ACCESS LEVEL(액세스 레벨) 아이콘을 누릅니다(그림 158).
-
대화 상자에서 EXPERT(전문가) 아이콘을 누른 다음 확인 아이콘을 누릅니다(그림 158).
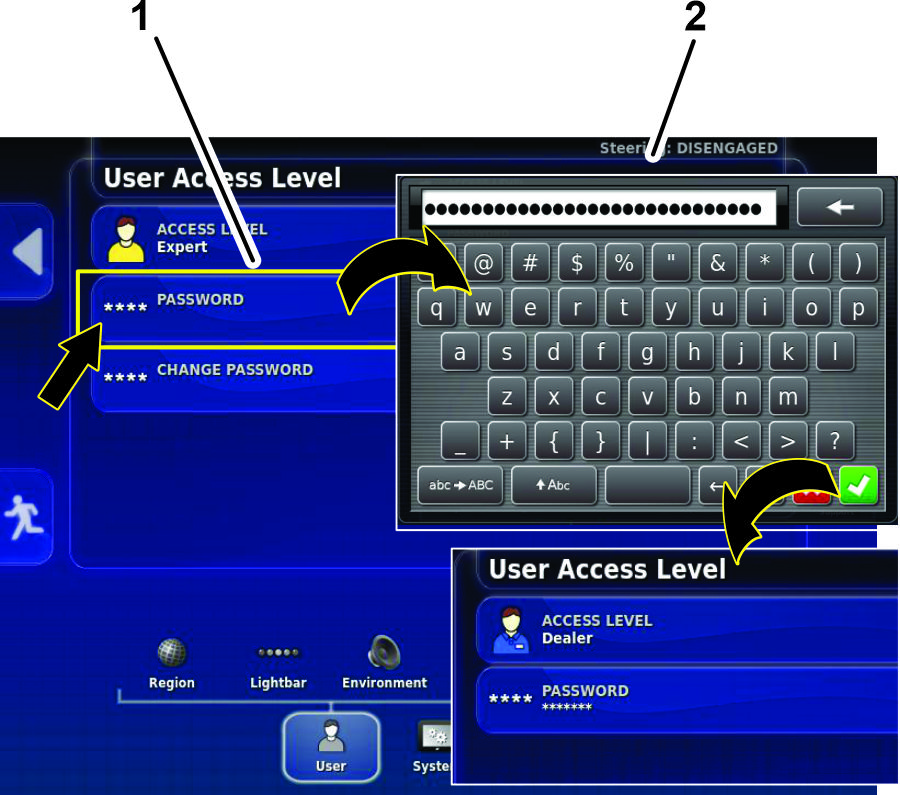
-
PASSWORD(암호) 아이콘을 누르고 팝업 키드보 창으로 딜러 암호를 입력한 다음 확인 아이콘을 누릅니다(그림 159).
Note: 사용자 액세스 레벨이 딜러를 표시합니다.
-
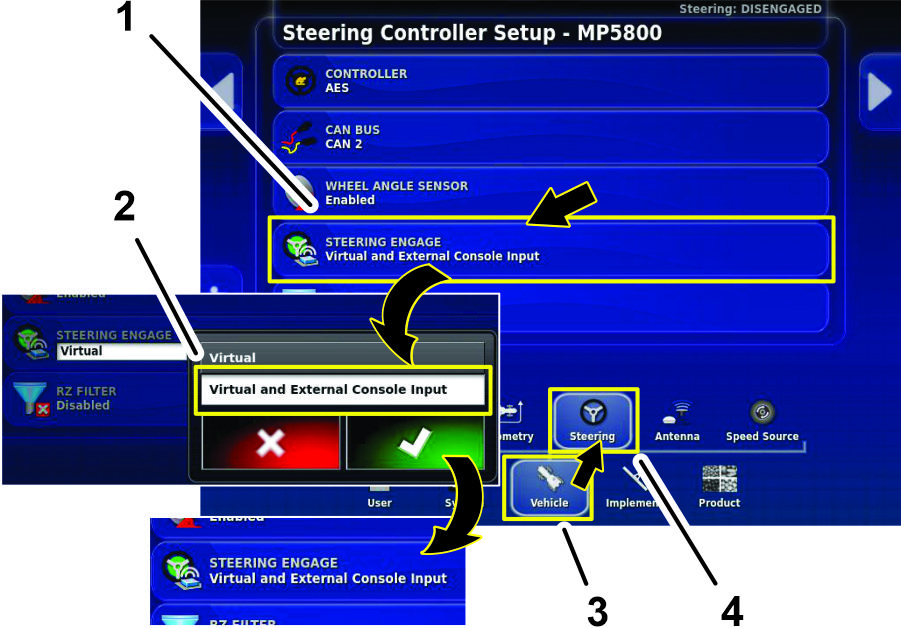
VEHICLE(차량) 아이콘에서 STEERING(스티어링) 아이콘을 누릅니다(그림 160).
-
STEERING ENGAGE(스티어링 체결) 아이콘을 누릅니다(그림 160).
-
대화 상자에서 VIRTUAL AND EXTERNAL CONSOLE INPUT(가상 및 외부 콘솔 입력) 아이콘을 누른 다음 확인 아이콘을 누릅니다(그림 160).
휠 각도 센서 보정
-
나무와 건물이 없으며, 92 직선으로 92 m 운전할 수 있는 열린 평지로 이동합니다.
-
STEERING OPTIONS(스티어링 옵션) 아이콘을 누릅니다(그림 161).
스티어링 옵션 메뉴가 표시됩니다.

-
AUTO STEER CALIBRATION(자동 조종 보정) 아이콘을 누릅니다(그림 161).
스티어링 보정 메뉴가 표시됩니다.
-
WHEEL ANGLE SENSOR(휠 각도 센서) 아이콘을 누릅니다(그림 161).
휠 각도 센서 보정 마법사가 시작됩니다.
Note: 제어 콘솔에 NOT INITIALIZED(시작되지 않음) 메시지가 표시되면 몇 분 동안 장비를 구동합니다.
-
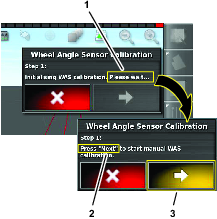
1단계에서 휠 각도 센서 보정이 시작될 때까지 기다린 후 다음 단계 아이콘을 누릅니다(그림 162).
-
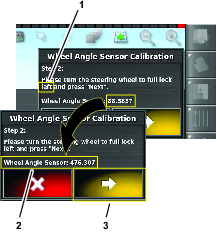
2단계에서 스티어링 휠을 왼쪽으로 완전히 돌린 다음 멈추고, 다음 단계 아이콘을 누릅니다(그림 163).
Important: 스티얼 휠이 회저할 때 휠 각도 센서 값이 변경되는지 확인합니다
-
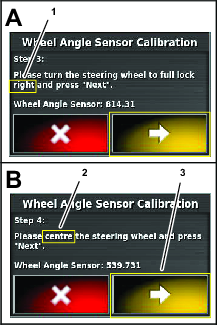
3단계에서 스티어링 휠을 오른쪽으로 완전히 돌린 다음 멈추고, 다음 단계 아이콘을 누릅니다(그림 164).
-
4단계에서 타이어가 앞으로 정렬할 때까지 스티어링 휠을 돌린 다음 멈추고, 다음 단계 아이콘을 누릅니다(그림 164).
-
5단계에서 휠 각도 센서 보정이 데이터를 저장할 때 기다린 후 다음 단계 아이콘을 누릅니다(그림 165).
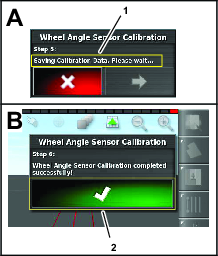
-
6단게에서 확인 아이콘을 누릅니다(그림 165).
자동 조종에 대한 장착 편향 보정
이 절차를 사용하여 장비의 리시버 위치를 보정합니다. 처음 설치되었거나 위성 리시버를 교체한 경우, 위성 리시버 장착 편향을 보정합니다.
Note: 이 보정에서는 76 m 이상 직선으로 운전할 수 있는 열린 평지가 필요합니다.
-
STEERING OPTIONS(스티어링 옵션) 아이콘을 누릅니다(그림 166).
스티어링 옵션 메뉴가 표시됩니다.
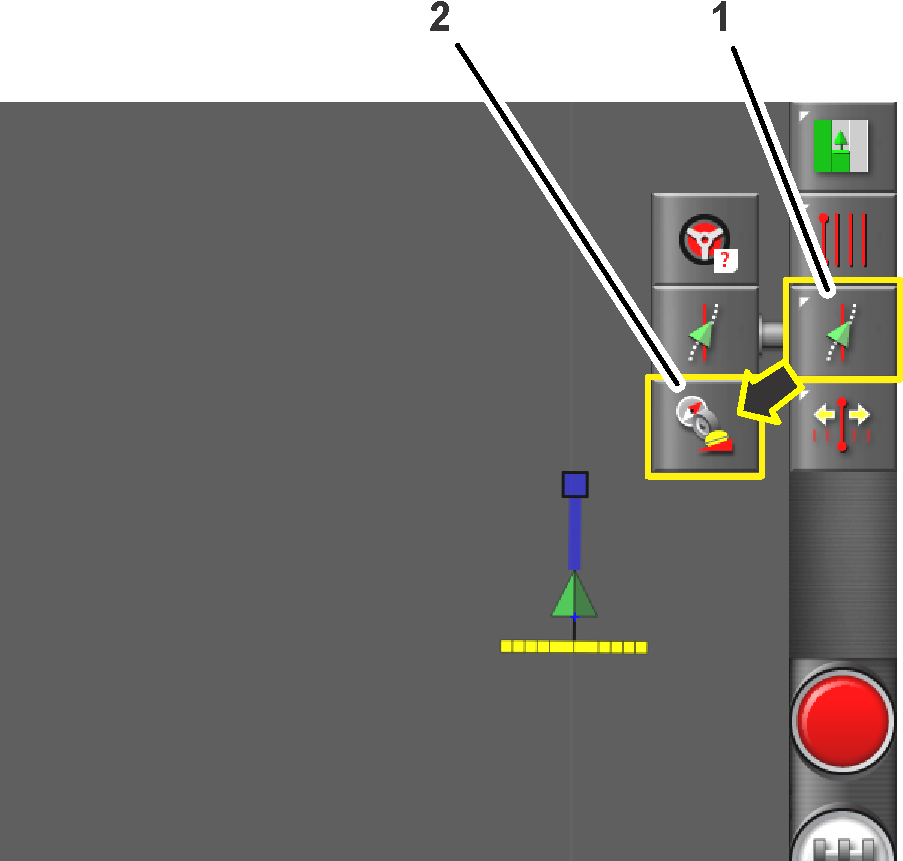
-
STEERING CALIBRATION(스티어링 보정) 아이콘을 누릅니다(그림 166).
스티어링 보정 메뉴가 표시됩니다.
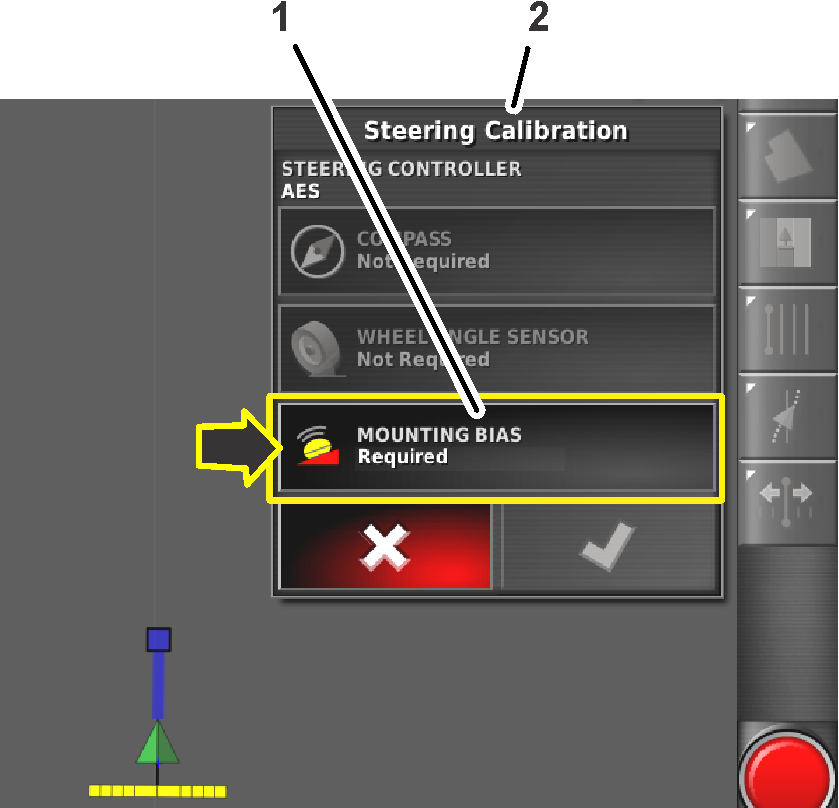
-
MOUNTING BIAS(장착 편향) 아이콘을 누릅니다(그림 167).
장착 편향 보정 마법사가 표시됩니다.
Note: 장착 편향 아이콘이 NOT REQUIRED(필요하지 않음)을 표시한 경우 장착 편향 설정을 보정할 필요가 없습니다.
-
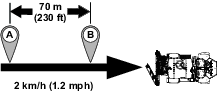
장비를 열린 지역의 끝까지 운전한 다음 직선으로 정렬하고 POSITION A(위치 A) 아이콘을 누릅니다
Note: 포인트 A 기호가 제어 콘솔에 나타납니다.
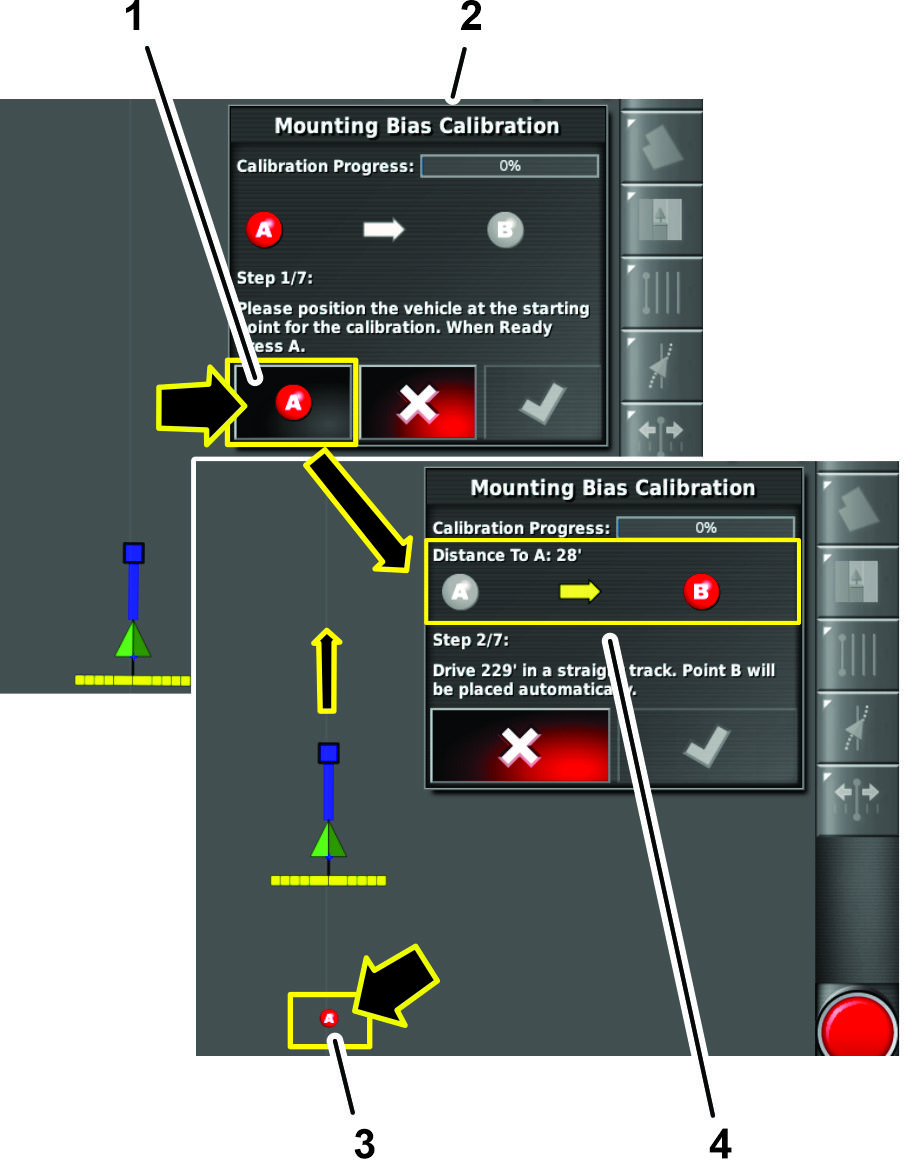
-
2 km/h 속도로 장비를 전방(그림 169)으로 수동으로 운전합니다.
Note: 장비가 70 m를 이동하면 GeoLink는 디스플레이에 위치 B 기호를 자동으로 삽입합니다.
-
명령 콘솔은 다음 보정 프로세스 화면을 표시합니다.
장비를 회전하고 정비를 제어 콘솔의 위치 A 및 B 가이드라인과 정렬합니다(그림 170).
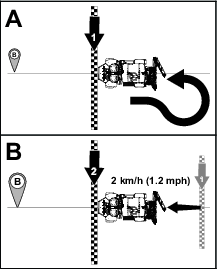
-
장비를 위치 B를 향해 운전하고 AUTO STEER(자동 조종) 아이콘
 을 누릅니다.
을 누릅니다.Important: 자동 조종 기능이 장비를 조종하도록 허용합니다.
-
위치 B에 도달하기 전에 이동 속도를 2 km/h로 설정하고 장비의 스로틀 잠금장치를 체결합니다(그림 170).
Note: Autosteer가 위치 B 및 A 사이에서 장비를 조정합니다(그림 171).

-
장비를 멈춥니다.
-
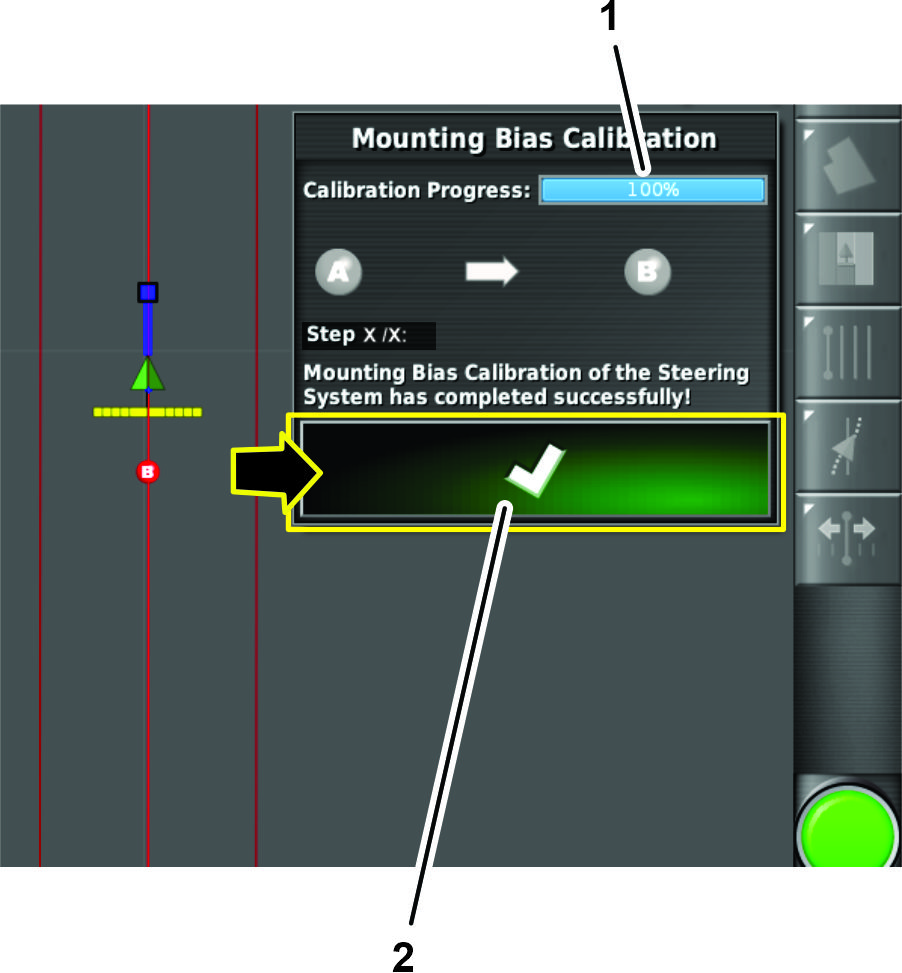
명령 콘솔이 다음을 표시합니다.
-
대화 상자가 100% 보정 진행을 표시하면 확인 아이콘을 누릅니다(그림 172).
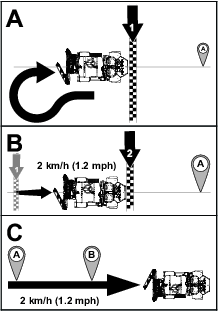
-
위치 A에서 위치 B 장착 편향 보정 패스를 수행하는 추가 단계를 포함하는 대화 상자.
Note: 위치 A에서 위치 B 장착 편향 보정 패스를 수행한 후 시스템이 100% 보정 진행을 표시하지 않을 경우, Toro 기술 지원 센터로 문의하십시오.
-

유압 오일 레벨 점검
유압 오일 레벨을 점검하십시오. 오일 레벨이 낮으면 유압 오일 탱크에 오일을 보충합니다. 유압 오일 사양과 점검 절차는 사용 설명서를 참조하십시오.
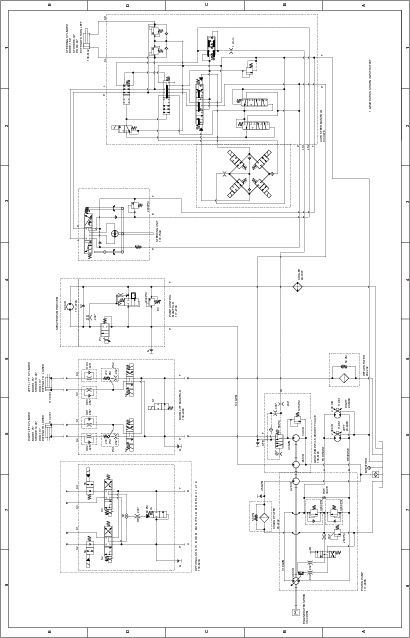
개요도
유압 도면 138-6255