The easiest way in which
to ensure that each zone and its border is mowed regularly is to implement
sequential scheduling. When sequential scheduling
is implemented, the robot will work in each zone in turn and mow the
border when the mowing is complete. The robot
works in conjunction with the defined working schedule.
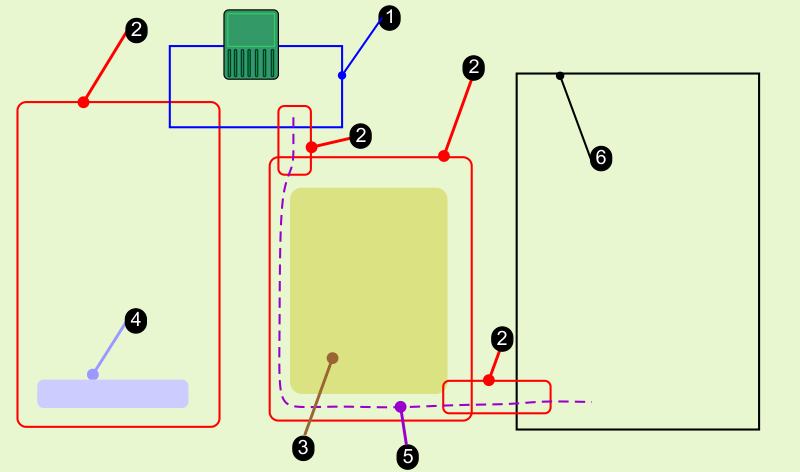
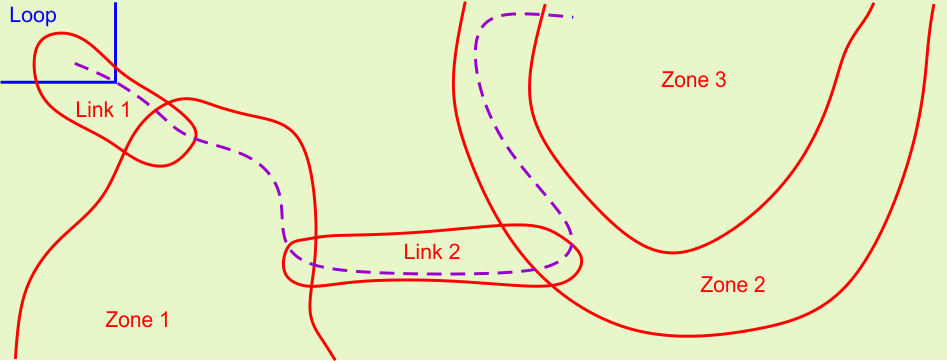
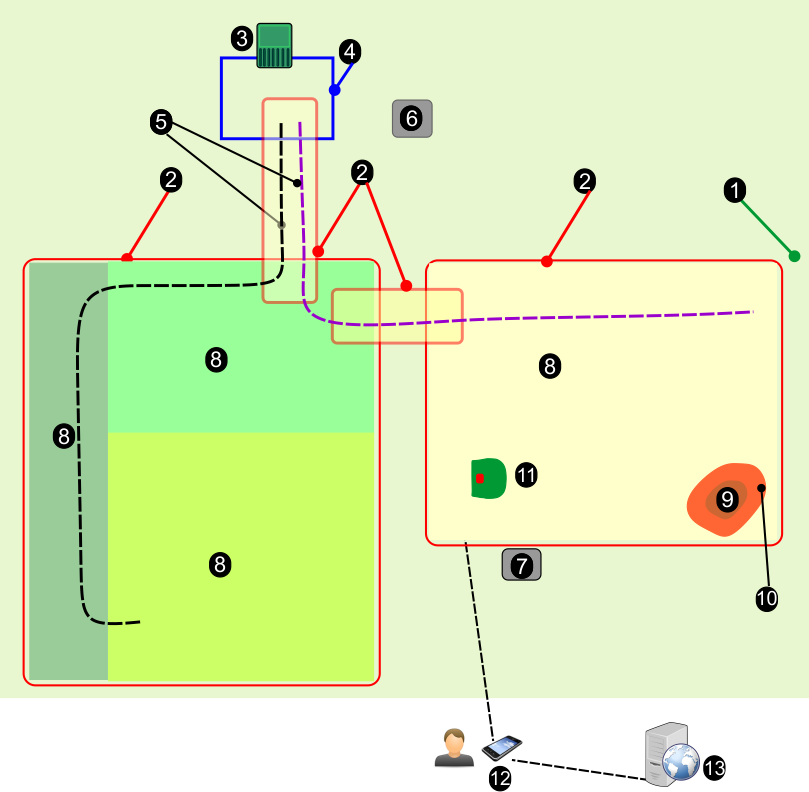
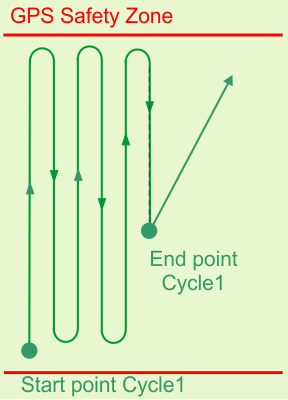
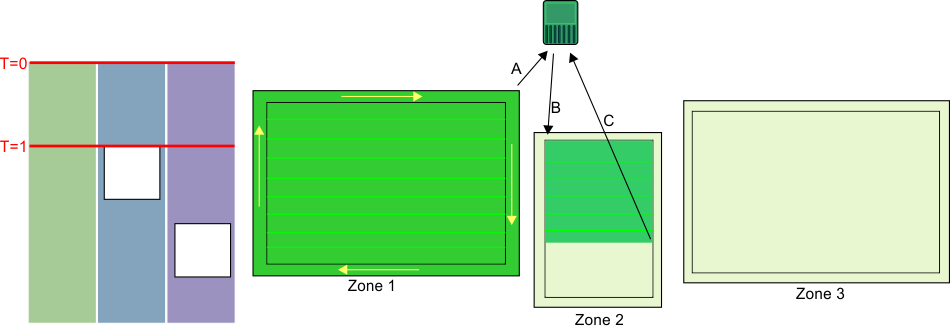
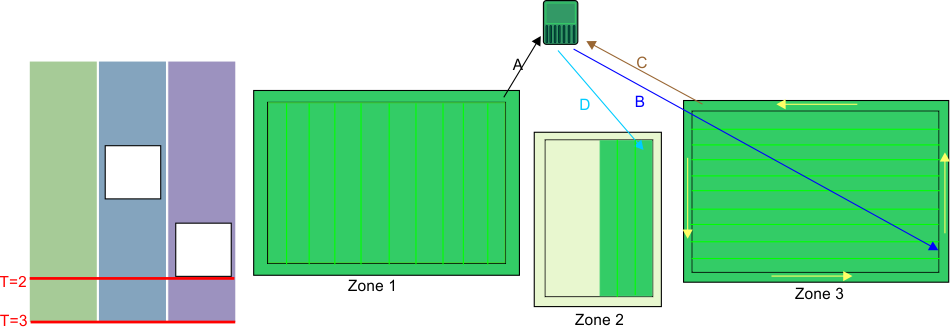
The process
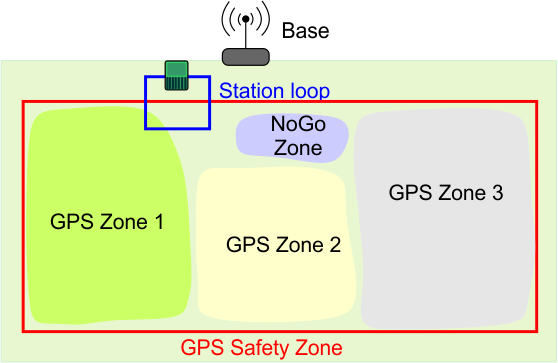
of sequential scheduling is shown in the following figure. Consider
the installation setup with three separate
zones to be mowed. The defined schedule dictates that zones 2 and
3 are unavailable for certain times of the day.
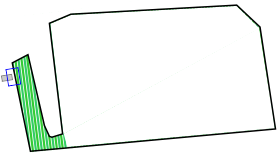
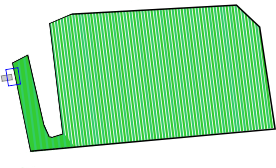
At time T=0, the robot starts
mowing zone 1. When the whole area has been mowed, it mows the border
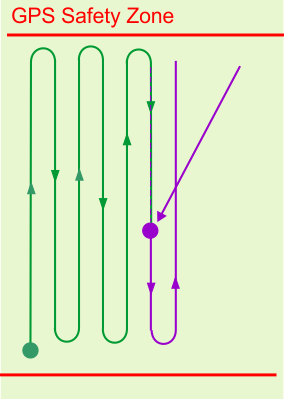
and then returns to the station (A). It then
moves to zone 2 (B), and mows until time T=1, at which point, the
defined schedule dictates that zone 2 is unavailable.
The robot returns to the station (C).
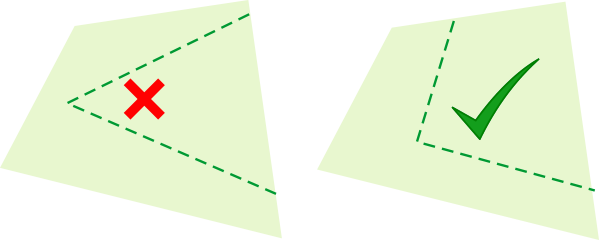
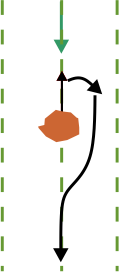
Note: When mowing the border, the robot follows the same direction as was
used when the border was discovered.
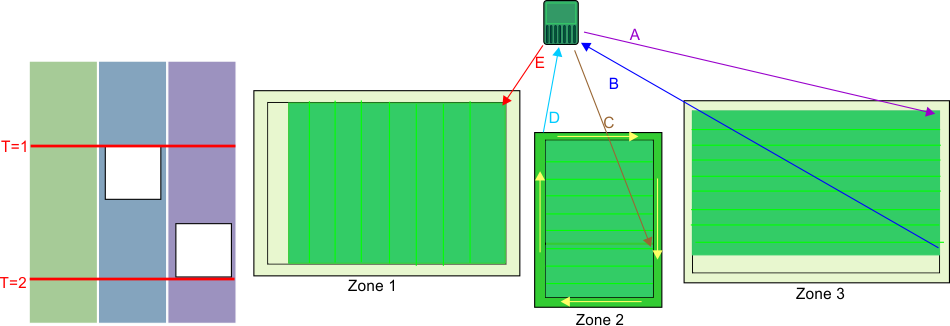
At the time T=1, the robot will
move to zone 3 (A) and mow there until the schedule dictates that
zone 3 is unavailable. The robot will return
to the station (B) and then return to finish mowing zone 2 (C). When
the area has been mowed, it will mow the border
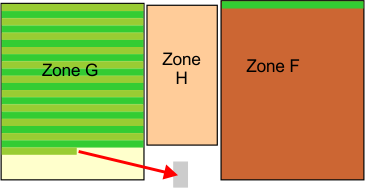
before returning to a station (D). Since zone 3 is still unavailable,
it will move to zone 1 and start mowing in
a new direction (E).
At time T=2, zone 1 is not complete,
when zone 3 becomes available.
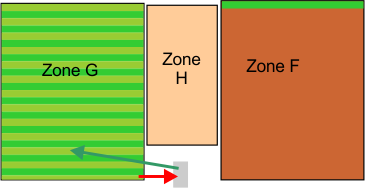
At time T=2, the robot will complete
mowing zone 1 and then mow the border before returning to the station
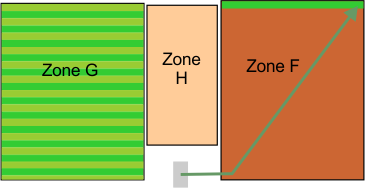
(A). It will then return to zone 3 (B) and
complete mowing the zone and the border. It will return to the station
(C) and then start mowing zone 2 in a new
direction (D).
Note: It is strongly recommended to use sequential scheduling. If it is
not used, it is necessary to define the percent of time
to be spent working in a particular zone and to specify
explicitly the number of times per week that the border is to be mowed.