Panoramica del prodotto
Panoramica del GPS RTK
- I dati sulla posizione GPS standard
ricevuti dai satelliti tramite GNSS (Global Navigation Satellite System,
sistema globale di navigazione satellitare)
offrono una precisione compresa tra 5 m e 10 m. Ciò
accade in quanto il segnale ricevuto da un
satellite viene distorto da condizioni atmosferiche e ambientali.
È possibile ottenere dei dati sulla posizione più precisi
utilizzando la tecnica RTK (Real-Time Kinematic,
cinematica in tempo reale).
- Tale tecnica prevede l'utilizzo di una base RTK posta in un luogo
fisso, che riceve dei segnali GNSS dai satelliti. Poiché
la base si trova in un luogo fisso, i dati da
questa ricevuti fanno riferimento alla sua posizione precisa.
- Anche i robot sono dotati di antenne,
e ricevono segnali GNSS dai satelliti per determinare la propria posizione.
Sia la base RTK sia i robot ricevono i
segnali GNSS da satelliti appartenenti a costellazioni satellitari
diverse (GPS, GLONASS, Galileo, BeiDou).
Tuttavia, dato che i robot si spostano, la stima della loro posizione
è meno precisa rispetto a quella della base
posta in un luogo fisso.
- La base RTK elabora dei dati di correzione per ciascuno dei satelliti
e li invia ai robot. I robot utilizzano quindi tali
dati di correzione per ottenere una precisione relativa
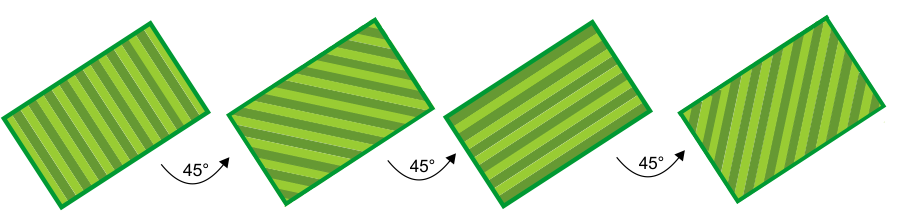
alla posizione compresa tra 2 cm e 3 cm. Grazie a dati sulla
posizione tanto precisi, i robot sono in grado
di seguire uno schema definito e coprire il prato seguendo una serie
di linee rette.
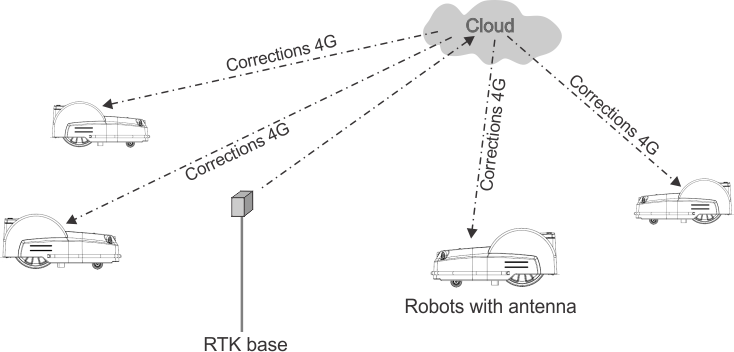
È inoltre
possibile effettuare delle correzioni tramite cloud utilizzando il
4G. In questo caso, gli ostacoli non impediscono
il trasferimento dei dati di correzione e la base può collegarsi
a un numero illimitato di robot fino a un massimo di 15 km
di distanza.
Trasferimento dei dati di correzione
utilizzando il 4G
G520851
Una stazione base può inviare
dati di correzione a più robot, ma ciascun robot deve ricevere
tali dati da 1 sola stazione base, al fine
di mantenere coerenti le correzioni.
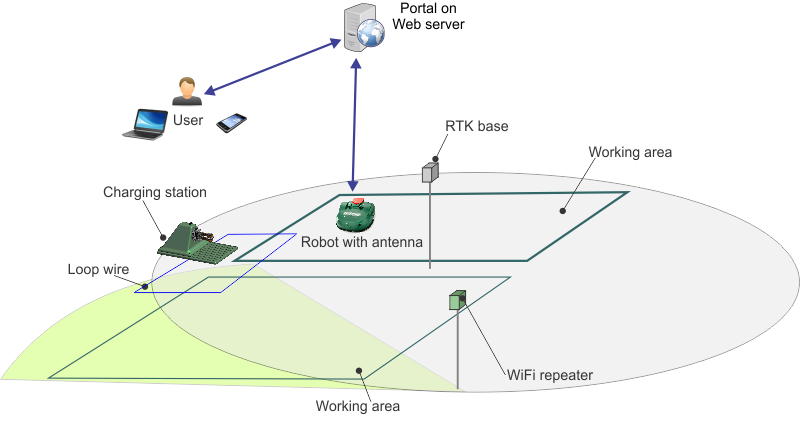
Componenti base del tosaerba dotato
di GPS RTK
G520852
In questa sezione vengono descritte
le caratteristiche meccaniche del robot.
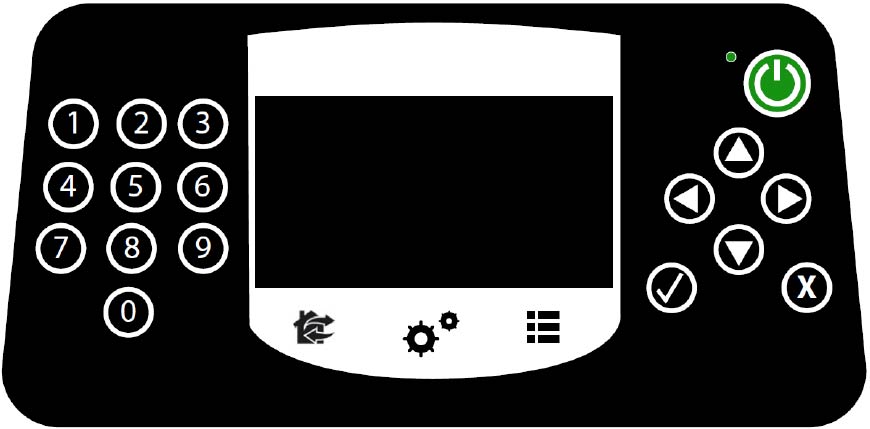
Un utente può controllare
direttamente il robot tramite l'interfaccia utente. Una volta che
un robot è stato registrato sul portale
web:
- Il robot può inviare informazioni
al server del portale, così che l'utente possa visualizzarle.
- L'utente può inviare dei
comandi al robot, verificarne le prestazioni e regolarne la configurazione.
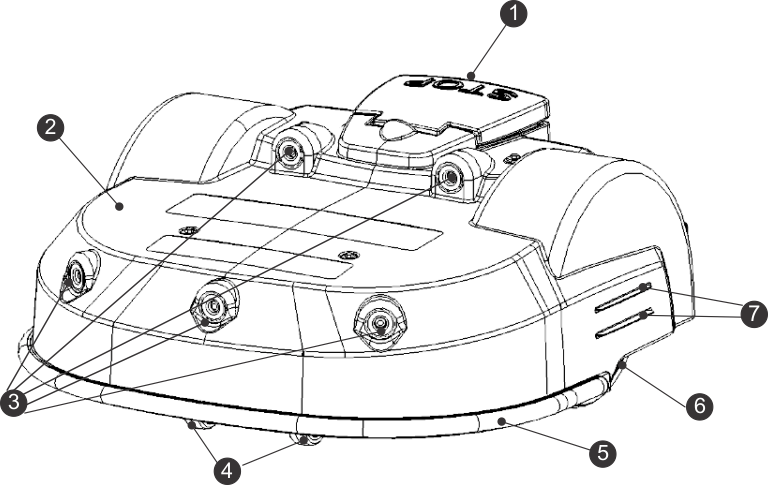
Panoramica del prodotto Turf Pro 500SL
Vista dall'alto
G519921
-
Pulsante Stop
-
Corpo
-
Sensori sonar per il rilevamento
degli ostacoli
-
Ruote anteriori
-
Paraurti
-
Ruote posteriori
-
Contatti di ricarica
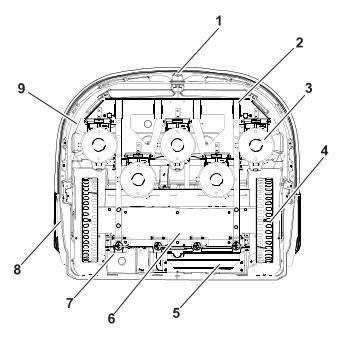
Vista inferiore
G529049
-
Bobina
-
Ruote anteriori
-
Teste di taglio
-
Ruote posteriori
-
Batteria
-
Scatola dell'elettronica sigillata
(smart box)
-
Interruttore di accensione/spegnimento
-
Contatti di ricarica
-
Disco di protezione
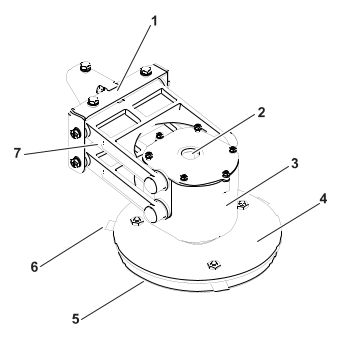
Testa di taglio
G526500
-
Staffa
-
Ingresso del cavo
-
Alloggiamento del motore
-
Disco di supporto delle lame
-
Disco antifrizione
-
Lama di taglio
-
Pantografo
Nota: Il disco di supporto delle lame (D), il disco antifrizione (E) e
le lame di taglio (F) sono denominati collettivamente "disco
di taglio".
Interruttore di accensione
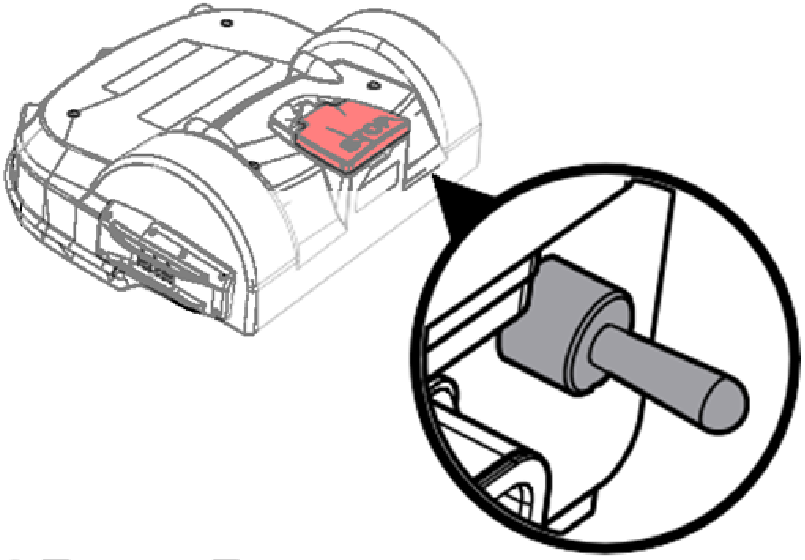 |
L'interruttore di accensione si
trova sotto la copertura sulla parte posteriore destra del robot. Per accendere il robot spostate
l'interruttore di accensione verso l'alto, in posizione ON.
Per tempi di
inattività prolungati o il rimessaggio invernale spostate l'interruttore
di accensione verso il basso, in posizione
OFF. |
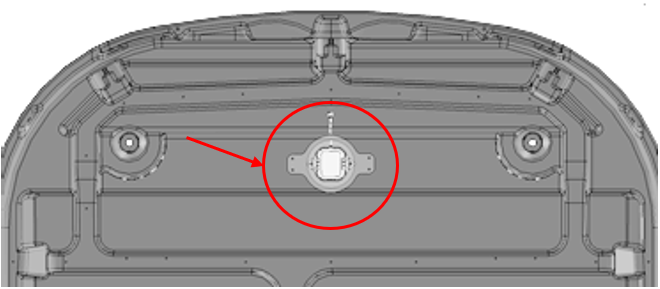
Antenna GPS RTK
G519918
Si tratta di un'antenna GNSS specifica
installata nella parte anteriore centrale della scocca. Serve a ricevere
dai satelliti dati relativi alla posizione
generale del robot.
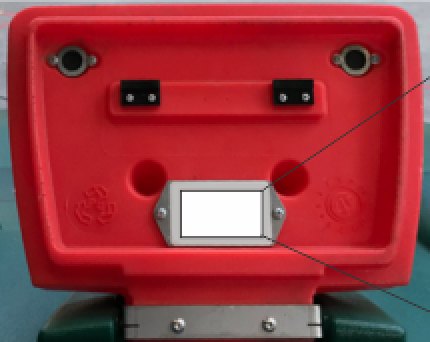
Etichetta identificativa
L'etichetta
identificativa si trova nella parte interiore del coperchio del pulsante
Stop, come illustrato di seguito.
G519938
Panoramica dei sensori
Turf Pro 500SL è dotato
di una serie completa di sensori che ne garantiscono il funzionamento
in sicurezza. Tali sensori assicurano che
il robot sia in grado di rilevare e di reagire a un ostacolo presente
sul suo percorso o un piccolo oggetto che potrebbe
venire danneggiato dalle lame di taglio.
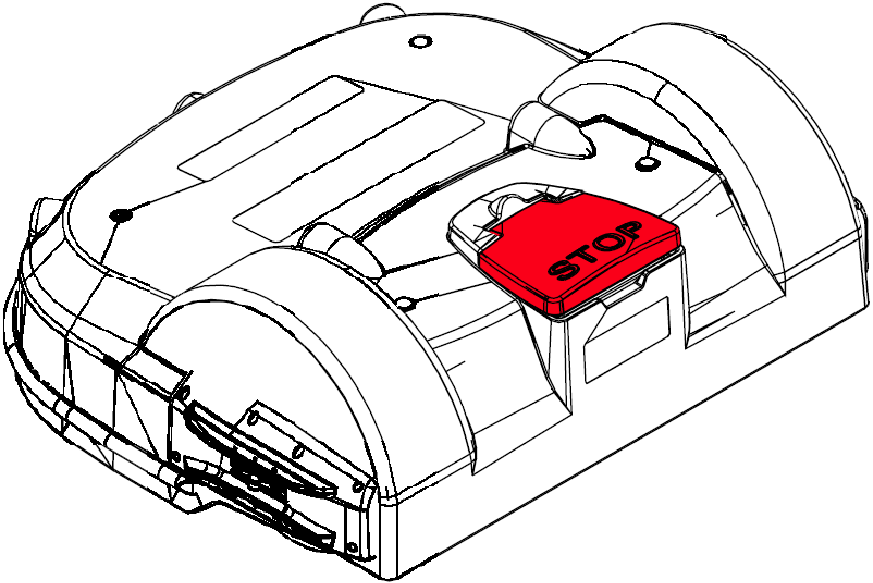
Pulsante Stop
Il pulsante Stop è
facilmente visibile e si trova sulla parte superiore del robot. Premendo
questo pulsante il robot smetterà
di muoversi e di tosare l'erba. Il pulsante Stop funge anche da coperchio,
e se sollevato consente di accedere all'interfaccia
utente del robot. Per riavviare il robot è necessario
immettere un comando tramite questa interfaccia utente.
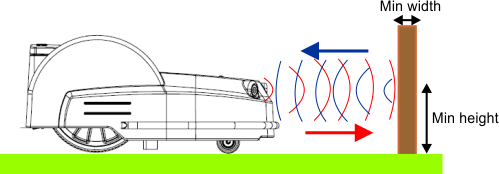
Sensori sonar per il rilevamento degli ostacoli
Il robot è dotato di una
serie di sensori sonar per rilevare gli ostacoli. Questi sensori trasmettono
un segnale sonar costante (40 kHz).
Quando il segnale incontra un ostacolo, le onde riflesse vengono ricevute
dai sensori e la velocità del robot viene
ridotta a 200 mm/s (meno di 1 km/h).
Rilevamento degli ostacoli tramite
i sensori sonar
G525070
Se il robot si sposta sempre
a velocità ridotta, anche nel caso in cui non siano visibili
degli ostacoli, i sensori presentano un
problema. In tale eventualità, contattate il team post-vendita
per ricevere assistenza nell'esaminare il problema.
Paraurti
Il
paraurti è un sensore di pressione che rileva quando il robot
entra a contatto con un ostacolo. Il robot, prima di toccare
l'ostacolo, si starà già muovendo
lentamente in quanto i sensori sonar avranno già rilevato l'ostacolo.
Quando il paraurti entra a contatto con
l'ostacolo, il robot si sposta in retromarcia e sterza fino a quando
non è in grado di aggirare l'ostacolo.
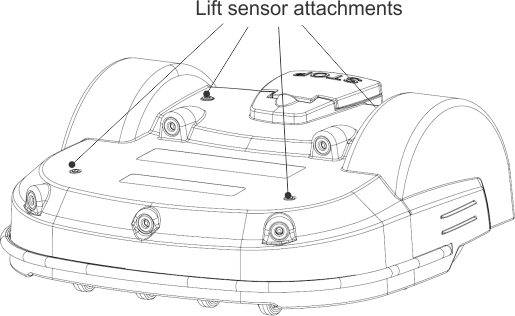
Sensori di sollevamento e spostamento del corpo del robot
Posizione dei fissaggi dei sensori
di sollevamento
G525071
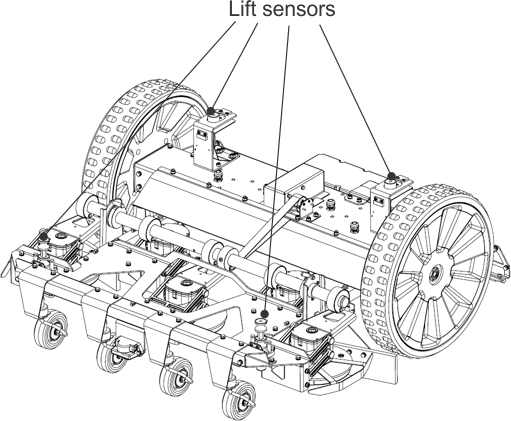
Sensori di sollevamento
G525072
I sensori di sollevamento
sono fissati in 4 punti del corpo del robot. Se il robot tocca
un oggetto basso che spinge la scocca verso
l'alto o se qualcuno tenta di sollevare il corpo del robot, i sensori
di sollevamento rilevano tali cambiamenti. Il
robot quindi si ferma e si sposta in retromarcia. Se questo
movimento libera il corpo dall'ostacolo, il robot effettua una
manovra per aggirare l'oggetto e continua
la tosatura del prato. In caso contrario, dopo 10 secondi si
attiva un allarme e il robot resta in modalità
di sicurezza (fermo) fino alla rimozione dell'ostacolo.
Bobina
La
bobina di induzione rileva l'intensità del campo magnetico generato
all'interno del cavo perimetrale. L'intensità massima
è in corrispondenza del cavo, e fa sì
che il robot si fermi, ruoti su se stesso e quindi continui a tosare
l'erba in una nuova direzione.
Sensore di inclinazione
Il sensore di inclinazione rileva
l'angolo della pendenza sulla quale sta lavorando il robot. Se tale
angolo supera i 30° (58%), si attiva
un allarme e il robot si ferma.
Sensore di ribaltamento
Il sensore di ribaltamento rileva
se il robot è stato rovesciato o se qualcuno sta cercando di
avviare il motore mentre il robot è
rovesciato.
Sensore di temperatura
Il sensore di temperatura misura
la temperatura ambientale e impedisce il funzionamento del robot nel
caso in cui la temperatura sia troppo bassa.
La temperatura minima alla quale il robot può funzionare viene
impostata come parametro di funzionamento.
Ricevitore GPS RTK
Questo sensore raccoglie dati
provenienti dai satelliti per determinare la posizione precisa del
robot.
Attrezzi/accessori
È disponibile una gamma di
attrezzi e accessori approvati Toro per l’impiego con la macchina, per ottimizzare
e ampliare le sue applicazioni. Richiedete un elenco di tutti gli
attrezzi e accessori approvati a un Centro Assistenza
o a un Distributore Toro autorizzati oppure visitate il
sito www.Toro.com.
Per ottenere prestazioni
ottimali e mantenere la certificazione di sicurezza della macchina,
utilizzate solo ricambi e accessori originali Toro.
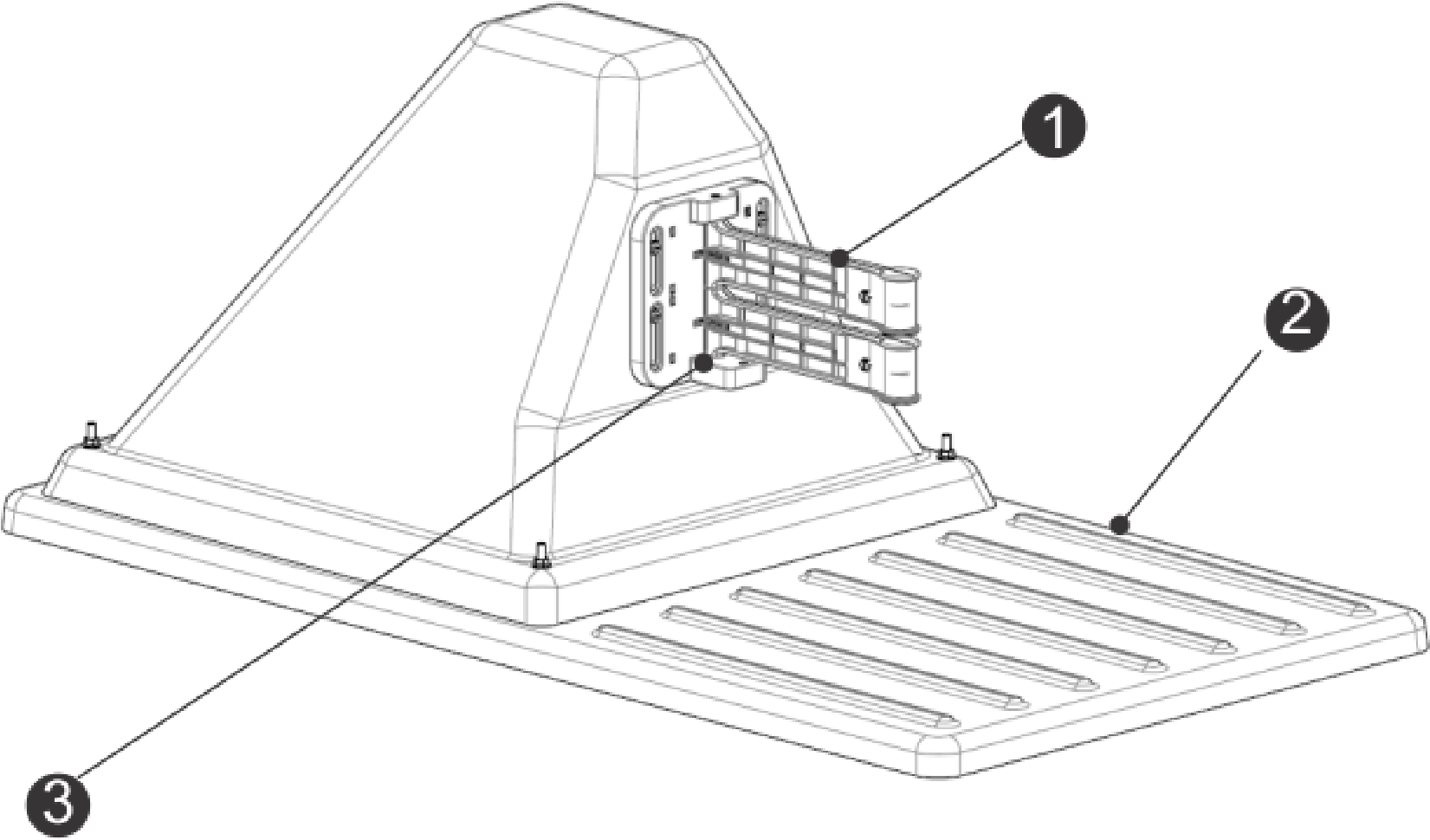
Panoramica stazione di ricarica
Componenti stazione di ricarica
G525910
-
Bracci di ricarica
-
Base
-
Sensore di occupazione
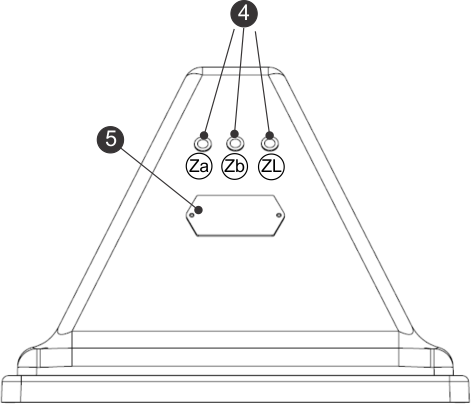
Vista posteriore della stazione
di ricarica (sono raffigurate configurazioni LED per 2 aree)
G520731
-
Indicatori LED
-
Etichetta identificativa
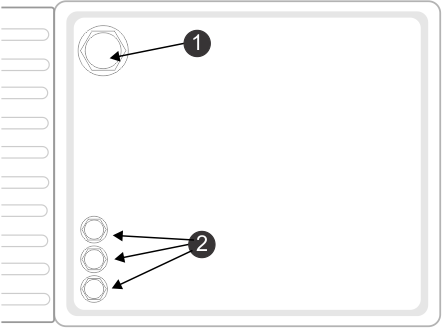
Vista inferiore della stazione
di ricarica(sono raffigurate configurazioni LED per 2 aree)
G520732
-
Input cavo di alimentazione
-
Input cavi perimetrali
Indicatori LED
Gli indicatori LED mostrano lo
stato attuale di ciascun cavo. Fate riferimento alla tabella seguente.
| Verde, lampeggiante |
Il cavo funziona come previsto. |
| Rosso, lampeggiante |
Impossibile rilevare un qualsiasi
cavo perimetrale. Ciò può verificarsi nel caso in cui il
cavo sia stato tranciato o sia
troppo lungo. |
| Rosso, fisso
|
È presente un problema. Ciò
può verificarsi nel caso in cui il cavo sia troppo corto (meno
di 200 m) o se vi è un problema
con i componenti elettrici.
|
I LED sono contrassegnati come
segue:
- ZL: cavo dell'area ciclica
- Za: cavo dell'area di lavoro A
- Zb: cavo dell'area di lavoro B
Specifiche
Nota: Specifiche e design possono subire variazioni senza preavviso.
Capacità
| Area di lavoro massima [m2]
|
75.000 m2 |
| Area di lavoro consigliata [m2]
|
55.000 m2 |
| Ampiezza di taglio [mm] |
1033 mm
|
| Velocità di funzionamento
[km/h] |
3,6 km/h
|
| Pendenza massima [%] |
45% (24°)
|
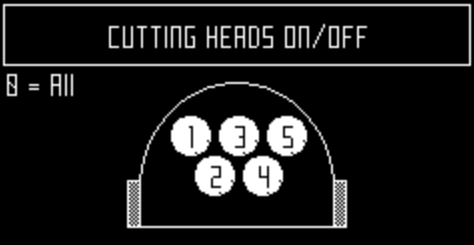
Taglio
| Numero di teste di taglio |
5
|
| Numero di lame di taglio |
15
|
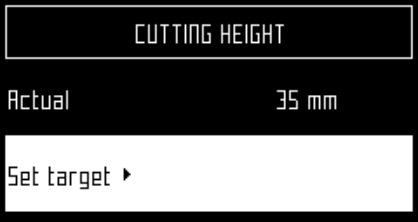
| Altezza di taglio minima (disco
standard/disco altezza ridotta)
|
20 mm / 15 mm
|
| Altezza di taglio massima (disco
standard/disco altezza ridotta)
|
100 mm / 90 mm
|
| Regolazione delle teste di taglio |
Elettronica
|
| Livello massimo di rumore (misurato
a 5 m) |
52 dB
|
Batteria
| Tipo
|
LiFePO4
|
| Tensione nominale [V] |
25,6 V
|
| Capacità nominale [Ah] |
19,2 Ah
|
| Energia [Wh]
|
491,5 Wh
|
| Intervallo di temperatura di funzionamento |
Da -5°C a +60°C |
| Tempo di tosatura medio [min] |
110
|
| Tempo medio per la ricarica completa
[min] |
90
|
Peso e dimensioni
| Peso [kg]
|
71 kg
|
| Lunghezza [mm]
|
1.110 mm
|
| Profondità [mm] |
1.278 mm
|
| Altezza [mm]
|
515 mm
|
Software e tracciamento
| Codice PIN di sicurezza |
Sì
|
| Localizzazione GPS |
RTK
|
| Gestione del robot tramite server
e app. |
Standard
|
Intelligenza
| Rilevamento via sonar degli ostacoli |
Multiplo
|
| Ritorno alla stazione via GPS |
Sì
|
| Tipo di tosatura
|
Con schema
|
| Area iniziale multipla |
Sì
|
| Prato multiplo (opzionale) |
Sì
|
| Robot/stazione multipli |
No
|
Sicurezza
| Sensori sonar per il rilevamento
degli ostacoli |
5
|
| Paraurti resistivo per le collisioni |
1
|
| Sensori di sollevamento anteriori |
2
|
| Sensori di sollevamento posteriori |
2
|
| Sensori di collisione posteriori |
2
|
| Sensore di ribaltamento/inclinazione |
1
|
| Deflettori delle teste di taglio |
2, 1 per ciascuna testa di taglio
esterna |
Manutenzione
Panoramica della manutenzione
- Il termine "manutenzione" fa riferimento
a una serie di azioni che devono essere svolte con regolarità
durante l'intera stagione di taglio dell'erba.
- Gli intervalli di manutenzione
variano in parte in base al carico operativo del robot, ma si consiglia
di affidare la manutenzione di quest'ultimo
a un tecnico autorizzato almeno una volta all'anno.
- Mentre effettuate operazioni di
manutenzione sul robot per garantirne le prestazioni ottimali, non
tentate di modificare in alcun modo il
robot. In caso contrario, potreste alterarne il funzionamento, causando
incidenti e danneggiando dei componenti.
Nota: Se notate un qualsiasi comportamento insolito o dei danni, rivolgetevi
a un tecnico.
- Quando seguite le procedure di
manutenzione, rispettate le seguenti norme per la sicurezza:
- Arrestate la macchina: spegnete
sempre la macchina e attendete che tutte le parti in movimento si
fermino prima di maneggiare la macchina.
- Utilizzate il dispositivo di disattivazione
nei seguenti casi:
- Prima di eseguire interventi sulla
macchina o di sollevarla.
- Prima di pulire un intasamento.
- Prima di controllare, pulire o
eseguire interventi sulla macchina.
- Dopo che la macchina è entrata
a contatto con un oggetto estraneo, prima di verificare l'eventuale
presenza di danni alla macchina.
- Se la macchina inizia a vibrare
in modo insolito.
Mantenete
adeguatamente serrati tutti i dadi, i bulloni e le viti, per assicurarvi
che la macchina funzioni nelle migliori
condizioni di sicurezza.
- Utilizzate dei guanti: è
necessario indossare dei guanti di protezione ogni volta che maneggiate
la macchina, e in particolare quando maneggiate
il sistema di taglio.
- Utilizzate sempre componenti OEM
(Original Equipment Manufacturer, del produttore originale delle apparecchiature).
Oltre a presentare un rischio di incidenti,
l'utilizzo di qualsiasi componente non OEM farà decadere la garanzia
in caso di danni da esso risultanti.
Piano di manutenzione consigliato
Nota: Le seguenti procedure devono essere seguite in base alla frequenza
consigliata se si impiega con regolarità il robot
Nota: Durante l'intera stagione di taglio dell'erba, controllate con regolarità
che tutti i dadi, i bulloni e le viti siano serrati
adeguatamente. Serrate eventuali dispositivi di fissaggio
lenti, e nel caso in cui vi siano danni o prove di un problema contattate
un tecnico autorizzato.
| Prima di ogni utilizzo o quotidianamente |
|
| Ogni 40 ore |
|
|
|
|
|
|
|
| |
|
|
|
|
|
|
|
|
| Ogni 6 mesi |
|
|
|
| Annualmente o prima del rimessaggio |
|
| |
Manutenzione dell'impianto elettrico
Controllo del cablaggio
-
Ispezionate
visivamente il cablaggio presente sotto il robot. Se notate dei problemi,
contattate un fornitore di assistenza autorizzato.
Manutenzione della batteria
Il funzionamento
automatico (programmato) del robot ottimizza la durata della batteria.
Si consiglia di lasciare che il robot gestisca
i propri cicli di lavoro. Se i cicli di lavoro vi sembrano insolitamente
brevi, contattate un fornitore di assistenza
autorizzato per verificare le condizioni della batteria.
Nota: È possibile monitorare i cicli di lavoro tramite il portale.
Manutenzione dell'apparato di
taglio
Ispezione dell'apparato di taglio
-
Ispezionate
le lame, i bulloni delle lame e il gruppo del disco di taglio con
cadenza settimanale per il corretto funzionamento
dell'apparato di taglio.
Sostituzione delle lame
Le buone condizioni delle lame
di taglio sono fondamentali per prestazioni di taglio soddisfacenti.
La durata della vita utile delle lame dipende
da una serie di fattori. Le parti del gruppo del disco di taglio devono
essere sostituite se danneggiate.
 |
Avvertenza |
|
Le lame sono affilate e potrebbero
causare la morte o gravi ferite in caso di contatto.
Fate attenzione
quando sostituite o pulite le lame.
-
Ruotate il
disco in modo che la testa della vite che fissa la lama sia visibile.
-
Rimuovete
la vite e quindi la lama.
-
Montate la
nuova lama e serrate la vite.
Nota: A seguito di qualsiasi intervento sulle teste di taglio, fate ruotare
ciascuna di esse indipendentemente dalle altre e controllate
che far ruotare una di loro non faccia
ruotare le altre.
Panoramica della sostituzione
delle lame
La frequenza
di sostituzione delle lame dipende dal tipo di robot, dal suo utilizzo
e dal terreno su cui opera. Poiché il
buono stato delle lame è fondamentale per una tosatura soddisfacente,
è consigliabile controllare questa parte del robot con
cadenza settimanale a seguito della configurazione
e all'inizio di ogni nuova stagione di taglio dell'erba.
Il pantografo
consente alle lame di seguire l'andamento del terreno. Se il pantografo
non funziona correttamente, le lame possono
perdere il filo o spezzarsi. Il pantografo dev'essere controllato
e pulito con regolarità.
Fate riferimento alla seguente
lista di modi per prolungare la vita utile delle lame di taglio.
- Assicuratevi che il terreno sia
pianeggiante. Se il terreno presenta irregolarità importanti,
le teste di taglio potrebbero non riuscire
a seguirne l'andamento e le lame potrebbero entrare a contatto con
il terreno. Se possibile, cercate di spianare
il terreno e, se necessario, escludete le aree più
irregolari dal taglio dell'erba.
Nota: Potrebbero comparire dei solchi nei pressi della stazione di ricarica.
Si consiglia pertanto di spianare il terreno nei pressi
della stazione di ricarica o ricoprirlo con
dell'erba artificiale.
- Rimuovete eventuali cumuli di
terra creati da talpe. Quando il robot entra a contatto con un cumulo
di terra, le lame rallentano o possono
fermarsi. Una volta superato il cumulo di terra, le lame tornano a
girare a velocità normale. La resistenza posta
dalla terra e le variazioni di velocità possono
allentare le viti o danneggiare i fori delle viti.
- Evitate aree non ricoperte d'erba.
La presenza di aree non ricoperte d'erba all'interno di un'area erbosa
fa variare la velocità di rotazione
delle lame. Se la variazione di velocità avviene troppo spesso,
può danneggiare i perni e i fori delle viti.
Per evitare questo problema è possibile aumentare
l'altezza di taglio, in modo che il robot tagli una porzione inferiore
dello stelo e le variazioni di velocità
siano meno accentuate. In alternativa, è possibile riseminare
le aree spoglie.
- Evitate il contatto delle lame
con marcatori da campo in nylon. Il contatto con i marcatori da campo
in nylon può far perdere il filo
alle lame. Si consiglia di abbassarli in modo che si trovino al di
sotto dell'altezza di taglio impostata.
- Evitate il contatto delle lame
con ostacoli solidi e bassi nascosti tra l'erba. Questi possono includere
irrigatori, sassi, radici e così
via. Rimuovete eventuali sassi e altri oggetti che è possibile
spostare. Per evitare oggetti solidi permanenti
come degli irrigatori, impostate l'altezza di taglio in
modo che sia superiore all'altezza dell'ostacolo o modificate l'area
di falciatura.
Nota: Delle porte da calcio rimovibili sono un altro esempio di ostacolo
solido non rilevabile dal robot. Assicuratevi di rimuoverle
prima che venga effettuato il taglio dell'erba.
- Rimuovete le erbacce alte nei
pressi del cavo perimetrale. Delle piante alte e coriacee possono
far perdere il filo alle lame o danneggiarle.
Si consiglia pertanto di rimuoverle dalle vicinanze del cavo perimetrale.
Pulizia
Pulizia della macchina
Durante periodi
caratterizzati da un clima umido è necessario assicurarsi che
non si verifichino accumuli di fango ed erba
sulle parti in movimento: le ruote e le teste di taglio. Tali parti
devono essere ispezionate e pulite con cadenza giornaliera.
-
Premete il
pulsante rosso per arrestare il robot.
-
Inclinate
la macchina sul fianco posteriore.
-
Spegnete
la macchina.
-
Rimuovete
eventuali accumuli di sporco ed erba utilizzando un soffiatore, dell'aria
compressa e/o una spazzola metallica.
-
Strofinate
il corpo della macchina con un panno morbido e umido o con una spugna.
-
Se il corpo
della macchina è molto sporco, utilizzate una soluzione saponosa
o del detergente per piatti.
Non
utilizzate mai dei solventi.
Pulizia dei contatti di ricarica
-
Strofinate
la superficie dei contatti di ricarica con della carta vetrata (grana 280)
fino a quando i contatti non appaiono puliti.
Pulizia del paraurti
-
Controllate
che il paraurti sia integro: non devono essere presenti tagli o incrinature.
Nel caso in cui il paraurti non sia integro,
contattate un tecnico manutentore autorizzato.
-
Pulite il
paraurti utilizzando un panno umido.
Non
utilizzate dell'acqua.
Pulizia dei sensori sonar
I sensori sonar devono restare
puliti per il corretto funzionamento. Tutti i sensori devono funzionare
correttamente. Nel caso in cui uno qualsiasi
dei sensori non funzioni come previsto, si attiverà un allarme.
-
Rimuovete
dai sensori eventuali tracce di fango, erba o sporco e puliteli utilizzando
un panno umido.
Non
utilizzate dell'acqua.
Pulizia delle ruote anteriori
-
Rimuovete
eventuali tracce di fango ed erba utilizzando una spazzola metallica
o un panno.
-
Controllate
che le ruote girino liberamente e che non ci sia un gioco eccessivo.
Nel caso in cui il gioco sia eccessivo, sostituite
le ruote con ricambi originali Toro.
Pulizia dell'assale delle ruote
anteriori
-
Pulite l'assale
delle ruote anteriori utilizzando una spazzola e/o un panno.
-
Ispezionate
visivamente l'assale. In caso di problemi, sostituite l'assale con
ricambi originali Toro.
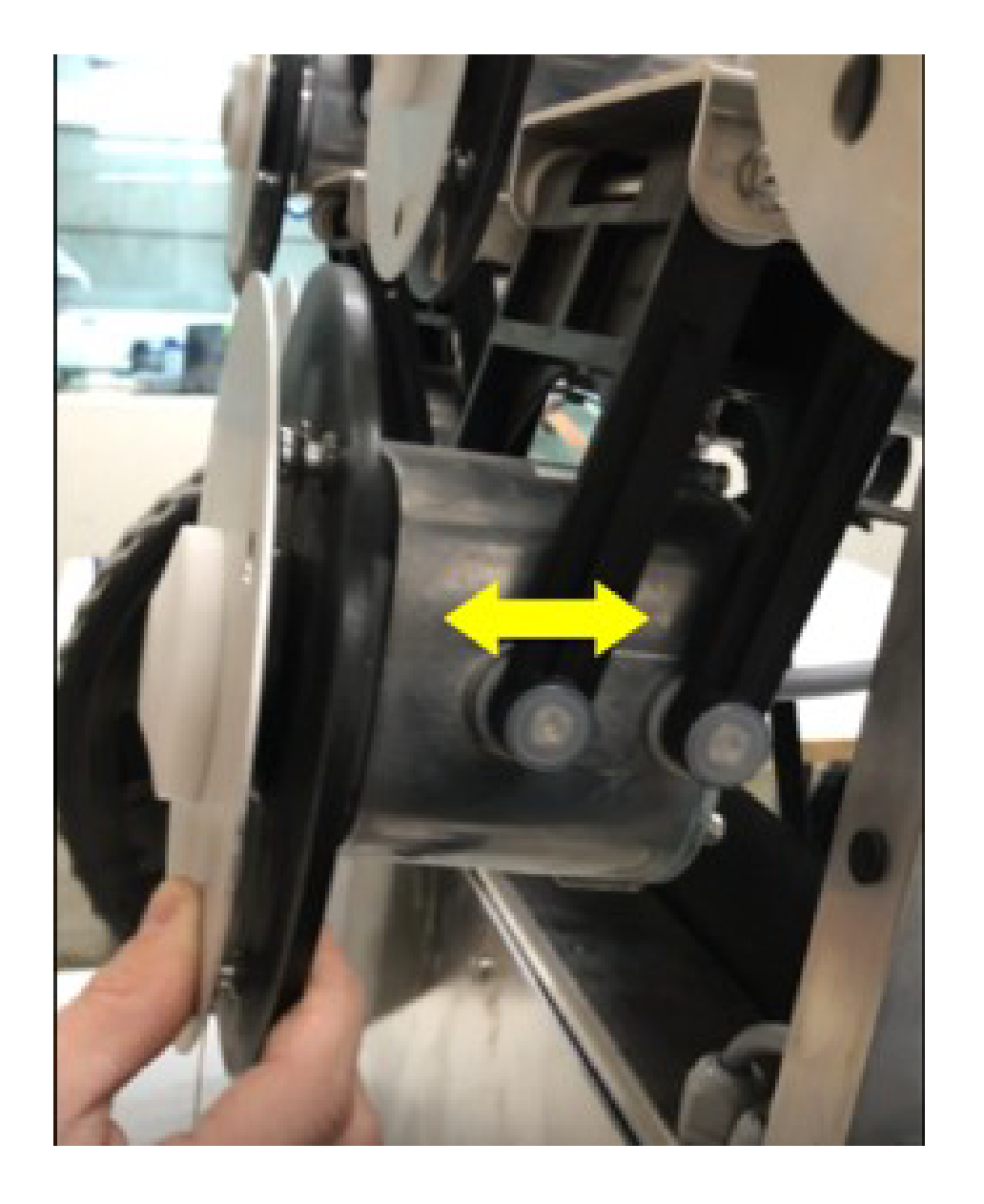
Pulizia delle teste di taglio
-
Pulite le
teste di taglio utilizzando una spazzola. Se avete a disposizione
dell'aria compressa, è preferibile utilizzare
quest'ultima per la pulizia.
-
Per ciascuna
testa di taglio, controllate che l'intera testa di taglio si muova
liberamente in avanti e all'indietro, come
illustrato dalla freccia nella figura sottostante.
Pulizia dei dischi di taglio
Questa procedura dev'essere effettuata
con cadenza settimanale. Ciò è particolarmente importante
nel caso in cui l'altezza di taglio sia stata
impostata a 25 mm (2,5 cm) o meno. In tale occorrenza, l'usura
sui dischi antifrizione è maggiore, ed
è necessario sostituire i dischi almeno una volta ogni 2 mesi.
-
Pulite i
dischi di taglio utilizzando una spazzola. Se avete a disposizione
dell'aria compressa, è preferibile utilizzare
quest'ultima per la pulizia.
-
Controllate
che i dischi di taglio ruotino liberamente. In caso di problemi, sostituite
i dischi di taglio con ricambi originali
Toro.
Pulizia delle ruote posteriori
-
Rimuovete
eventuali tracce di fango ed erba utilizzando una spazzola metallica.
Glossario
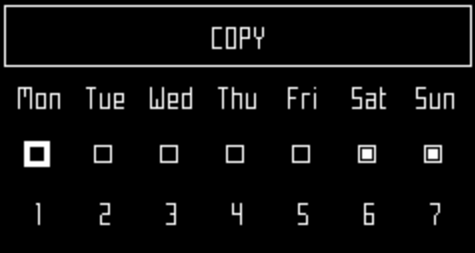
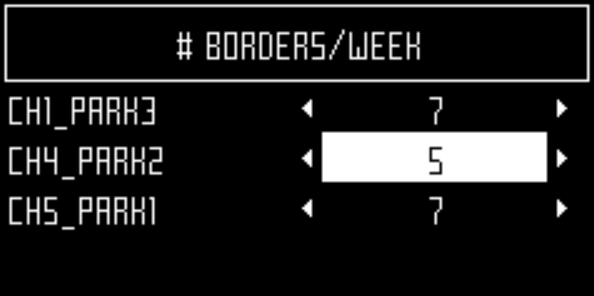
Modalità bordi
Quando il robot
falcia l'erba lungo i bordi del prato. Questa operazione viene svolta
un certo numero di volte alla settimana.
Ciclo
Una sessione di lavoro
del robot. Ha inizio quando il robot lascia la stazione e termina
quando fa ritorno alla stazione o si verifica un
problema che interrompe il ciclo di lavoro.
Entità
Un insieme di robot e utenti
che operano all'interno di un sito. Le informazioni relative ai robot
di un'entità sono visualizzabili all'interno
del portale web.
Area di spostamento GPS
Un'area GPS
RTK definita dal processo di rilevamento dei bordi. Include l'intera
area di lavoro. È possibile creare delle sottoaree
copiando e modificando questa area al fine di ottimizzare l'efficienza
del robot.
Punto GPS
Un punto specifico all'interno
di un'area che il robot utilizza per fare ritorno a una stazione o
lasciarla. Il punto è definito dalla sua latitudine
e longitudine. Il robot si dirige direttamente verso questo punto,
quindi segue il cavo perimetrale e il cavo dell'area
ciclica per fare ritorno alla stazione.
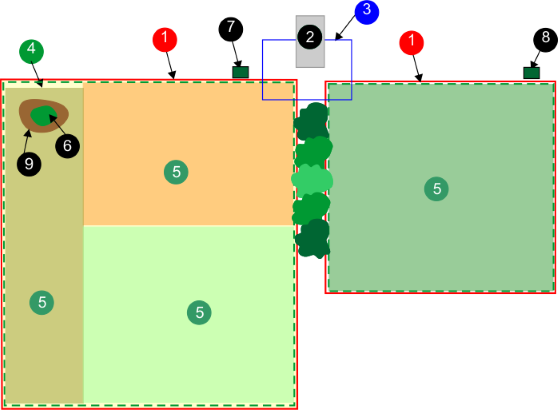
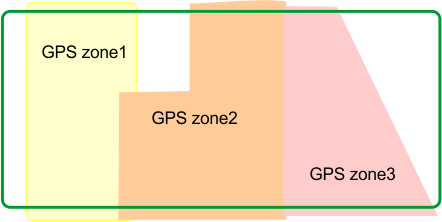
Area GPS
Un'area GPS è definita
da una serie di coordinate GPS. Consente a un'area definita tramite
cavo di essere suddivisa in più sottoaree senza
la necessità di utilizzare cavi e canali aggiuntivi.
Aree GPS all'interno di un'area
definita tramite cavo
G520046
Questa opzione offre una maggiore
flessibilità nella definizione delle aree di lavoro, in quanto
il robot può essere impostato per lavorare
con un'efficienza ottimale nelle varie aree.
Attesa
Il robot entra in modalità
di attesa se l'incarico attuale è stato interrotto utilizzando
il pulsante Stop. Per impostazione predefinita,
il robot entrerà in modalità di sospensione dopo 15 minuti.
Isola
Un anello del cavo perimetrale
installato appositamente per impedire che il robot operi al suo interno.
Il cavo perimetrale viene disposto attorno all'ostacolo
e i cavi di avvicinamento e di ritorno vengono posti l'uno accanto
all'altro.
Mappa
Mappa dei percorsi del
robot presente sul portale.
Mappatura
Le informazioni raccolte
dal robot utilizzando dati GPS.
Area di esclusione
Le aree di
esclusione definite tramite GPS sono regioni del prato definite da
coordinate GPS all'interno delle quali il robot
non può entrare durante i suoi stati operativi autonomi. Le aree
di esclusione definite tramite GPS sono utilizzate per escludere
dall'area di lavoro del robot delle aree che non
possono essere rilevate durante il rilevamento dei bordi. L'utilizzo
di aree di esclusione definite tramite GPS consente
al robot di calcolare in anticipo lo schema di taglio dell'erba più
efficiente. Le aree di esclusione definite tramite
GPS sono utilizzate per escludere ostacoli, in genere con la creazione
di isole e pseudo isole.
Ostacolo
Un oggetto presente all'interno
del prato che il robot deve evitare. Gli ostacoli possono essere permanenti
(ad esempio alberi o strutture) o transitori (ad
esempio animali). Gli ostacoli vengono rilevati dai sensori. Gli ostacoli
permanenti possono essere evitati creando degli
anelli con il cavo perimetrale al fine di formare delle isole o pseudo
isole.
Area
Una zona da tosare circoscritta
da un cavo perimetrale. A un cavo è associata almeno un'area.
È possibile definire più aree.
Percentuale
Questo elemento rappresenta
la proporzione di tempo che il robot impiegherà per occuparsi
di un'area specifica. Se è presente un'unica
area, il robot passerà il 100% del tempo al suo interno.
Cavo perimetrale
Un cavo disposto
al di sotto della superficie del prato che definisce la zona all'interno
della quale opera il robot. Questa zona definita
dal cavo perimetrale è definita area.
Pseudo isola
Il cavo perimetrale viene
fatto passare attorno a un ostacolo, mantenendo una distanza specifica
tra i cavi di avvicinamento e di ritorno.
Valori relativi allo stato del
robot
- Spegnimento
Il robot è stato spento.
- Spegnimento dopo un allarme
Il robot si è spento a seguito
di un allarme.
- Allarme
Il robot è in stato di allarme.
- Attesa
Il robot è in attesa presso
una stazione di ricarica.
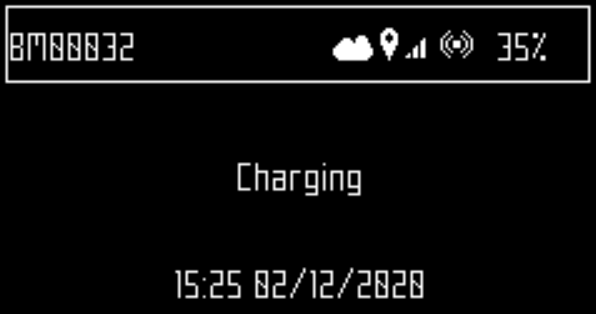
- Ricarica
Il robot sta effettuando la ricarica
della batteria.
- Spostamento verso la stazione
di scarico
Il robot si
sta dirigendo alla stazione di scarico per rilasciare le palline.
Questo stato ha inizio quando un robot decide
di fare ritorno alla stazione.
- Spostamento verso la stazione
di ricarica
Il robot si
sta dirigendo verso la stazione di ricarica. Questo stato ha inizio
quando il robot decide di fare ritorno alla
stazione.
- Uscita dalla stazione
Il robot sta lasciando la stazione
per iniziare i propri compiti.
Area GPS RTK
L'area di lavoro di un
robot che effettua la tosatura con schema. L'area GPS RTK è definita
dal robot percorrendo il cavo perimetrale.
Sito
L'intera zona che include l'area
all'interno della quale opera il robot.
Sospensione
Un robot entra in modalità
di sospensione 15 minuti dopo che un allarme si è attivato
e non è stato disattivato. Dopo 2 giorni
in modalità di sospensione, il robot entra in modalità
di spegnimento. Ciò si verifica anche nel caso in cui il livello
di carica della batteria diventi troppo basso. In
modalità di sospensione, il robot utilizza una quantità
di energia minima per ridurre eventuali rischi collegati
alla batteria.
Il robot può essere risvegliato
dalla modalità di sospensione:
- disattivando l'allarme e accendendo
il robot utilizzando il pulsante sullo schermo LED
- spingendo il robot fino alla stazione
di ricarica nel caso in cui la batteria sia scarica
- inviando un comando di riattivazione
remoto tramite il portale web
Area ciclica della stazione
Un'area ciclica
della stazione è costituita da una breve estensione di cavo disposta
attorno a una stazione di ricarica e utilizzata
per condurre il robot alla stazione. Quando il robot rileva di essere
all'interno dell'area ciclica della stazione, segue
il cavo fino ad arrivare alla stazione.
Terreno
Un'area con dell'erba intorno
al prato che non deve essere tosata.
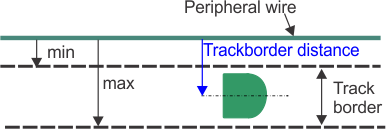
Confine
Una striscia d'erba lungo
il bordo dell'area all'interno della quale opera il robot. Il robot
segue il confine quando lascia o fa ritorno a una
stazione, a meno che non stia utilizzando il GPS. Non è specificato
alcun confine per un cavo che funge da ritorno all'area
ciclica della stazione.
Il confine si trova accanto al
cavo perimetrale, ed è definito da dimensioni minime e massime
impostate come parametri di configurazione. Il confine
è sempre più ampio del robot. Il percorso seguito dal robot
all'interno del confine viene selezionato in modo
casuale. Ciò garantisce che il robot non si sposti sempre lungo
lo stesso percorso, creando dei solchi nel prato.
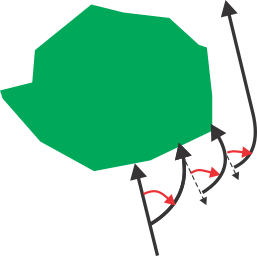
Se il robot incontra un ostacolo mentre si trova sul confine, i
sensori lo fanno muovere in retromarcia, quindi ruotare di
un'angolazione casuale prima di procedere. Questo processo
può ripetersi più volte, se necessario.
Manovre per evitare un ostacolo
sul confine
G520315
Seguire il cavo
Movimento del
robot lungo il cavo dell'area ciclica durante l'ingresso e l'uscita
dalla stazione.