Apresentação do produto
Apresentação do produto Cortador robótico da série
Turf Pro
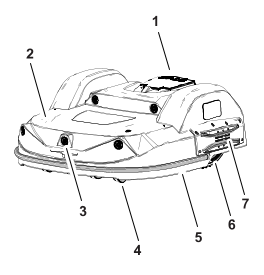
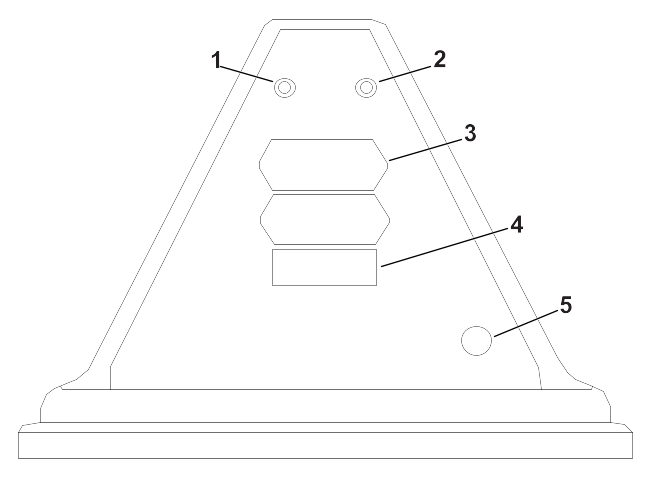
Vista superior
G538206
-
Botão de paragem
-
Estrutura
-
Sonares de deteção de
obstáculos
-
Rodas fronteiras
-
Para-choques
-
Rodas traseiras
-
Contactos de carregamento
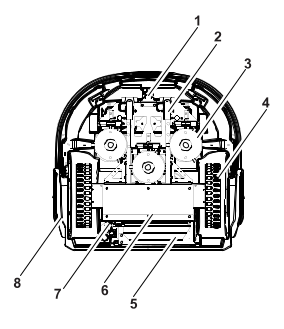
Vista inferior(modelo 300)
G538280
-
Bobina
-
Rodas fronteiras
-
Cabeças de corte
-
Rodas traseiras
-
Bateria
-
Caixa eletrónica selada (smartbox)
-
Interruptor de alimentação
-
Contactos de carregamento
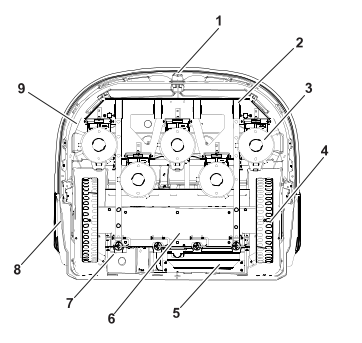
Vista inferior(modelo 500)
G529049
-
Bobina
-
Rodas fronteiras
-
Cabeças de corte
-
Rodas traseiras
-
Bateria
-
Caixa eletrónica selada (smartbox)
-
Interruptor de alimentação
-
Contactos de carregamento
-
Proteção do disco
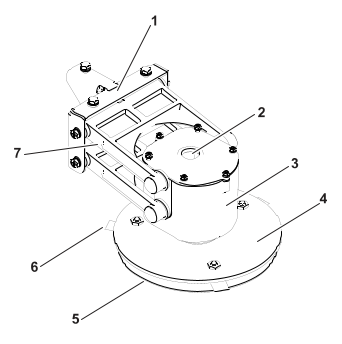
Cabeça de corte
G526500
-
Suporte
-
Entrada do cabo
-
Caixa do motor
-
Disco de apoio da lâmina
-
Disco de antifricção
-
Lâmina de corte
-
Pantógrafo
Nota: O disco de apoio da lâmina , o disco de antifricção
, o disco de antifricção e as lâminas de corte
e as lâminas de corte são designadas coletivamente
como "disco de corte".
são designadas coletivamente
como "disco de corte".
Interruptor de alimentação
(modelo 300)
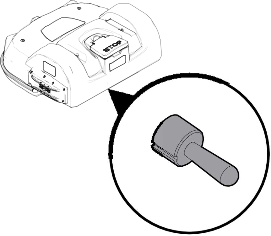
|
O interruptor de alimentação
está localizado por baixo da carcaça, na parte esquerda
traseira do robô. Coloque o interruptor de alimentação
para a direita, na posição ON, para ligar o robô. Coloque o interruptor de alimentação
para a esquerda, na posição OFF, para períodos de inatividade
prolongada ou armazenamento durante o inverno.
|
Interruptor de alimentação
(modelo 500)
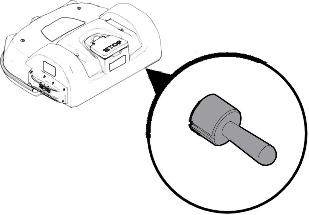 |
O interruptor de alimentação
está localizado por baixo da carcaça, na parte direita traseira
do robô. Coloque o interruptor de alimentação
para cima, na posição ON, para ligar o robô. Coloque o interruptor de alimentação
para baixo, na posição OFF, para períodos de inatividade
prolongada ou armazenamento durante o inverno.
|
Antena GPS RTK
G519918
Esta é um antena GNSS específica
instalada na parte central frontal da estrutura. É utilizada
para receber dados de satélites sobre
o posicionamento global do robô.
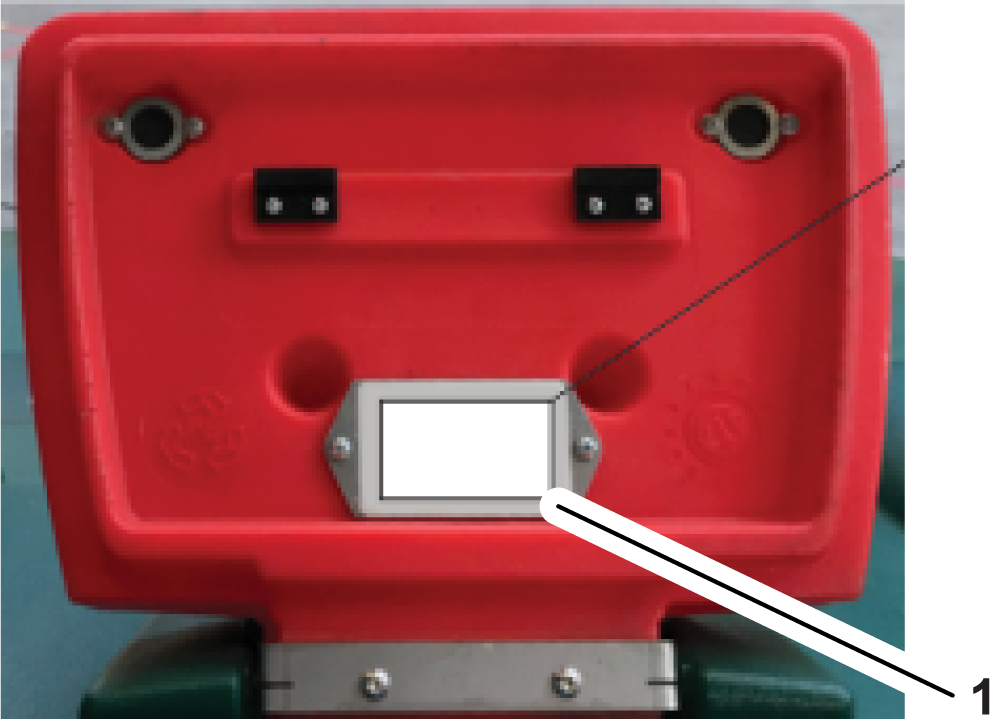
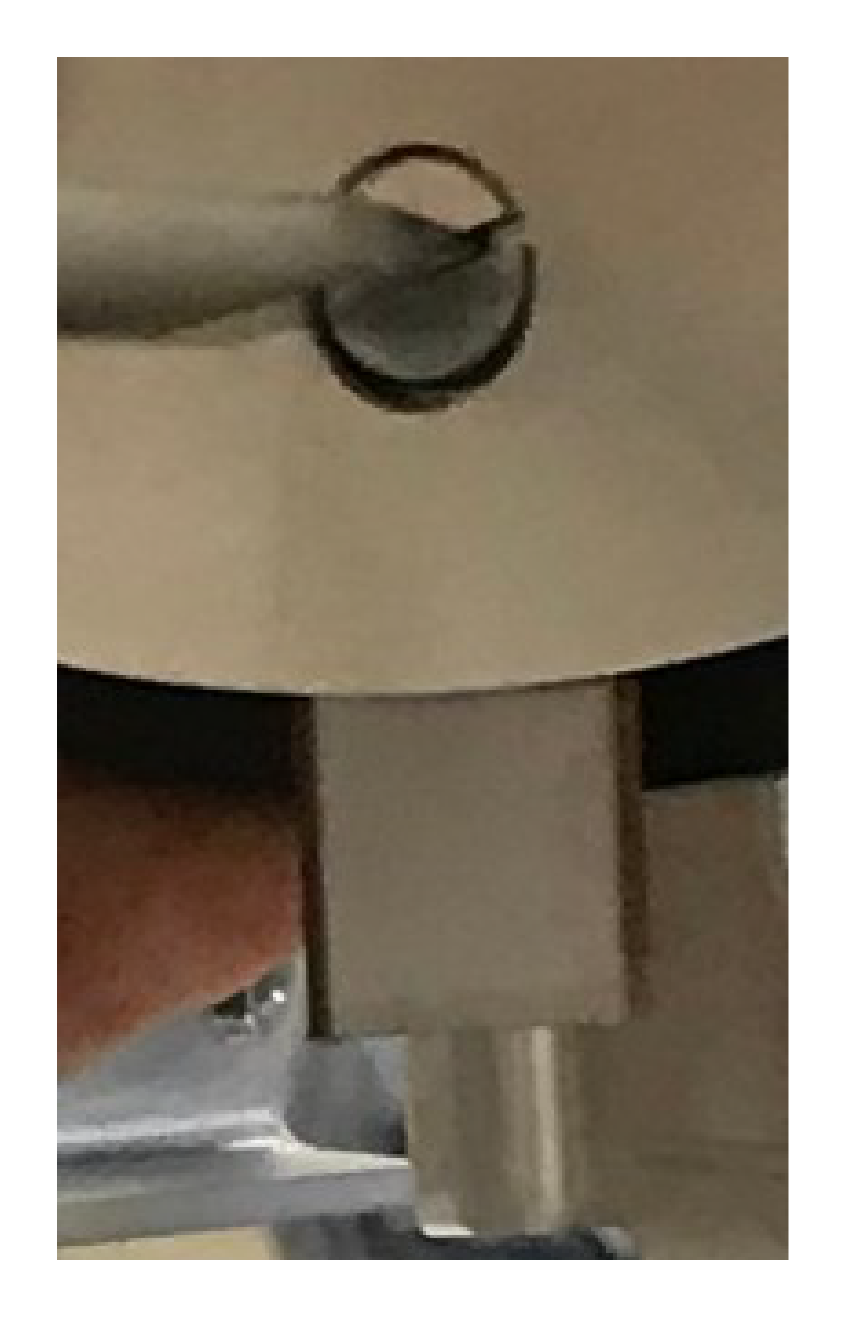
Autocolante do número de
série
A placa de identificação
pode ser encontrada dentro da tampa do botão de paragem, conforme
mostrado abaixo.
G541779
-
Autocolante do número de
série
Visão geral dos sensores
A máquina
está equipada com um conjunto alargado de sensores que garantem
um funcionamento seguro. Os sensores garantem que
o robô pode detetar e reagir se um obstáculo estiver
no caminho.
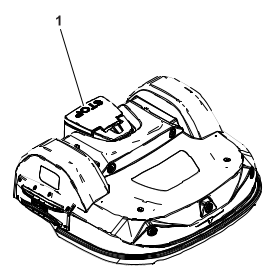
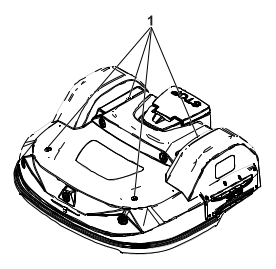
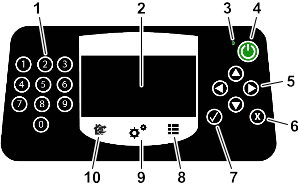
Botão de paragem
O botão de paragem  está facilmente visível,
localizado na parte superior do robô. Premir este botão
fará com que o robô pare de se mover e de
cortar. O botão de paragem também funciona
como uma tampa que, quando levantada, permite aceder à interface
do utilizador de controlo do robô.
Tem de ser emitida uma instrução utilizando esta interface
de controlo para reiniciar o robô.
está facilmente visível,
localizado na parte superior do robô. Premir este botão
fará com que o robô pare de se mover e de
cortar. O botão de paragem também funciona
como uma tampa que, quando levantada, permite aceder à interface
do utilizador de controlo do robô.
Tem de ser emitida uma instrução utilizando esta interface
de controlo para reiniciar o robô.
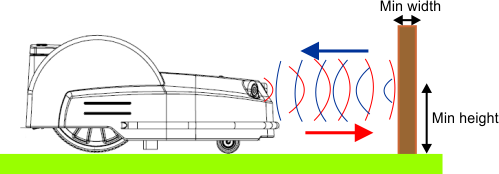
Sonares de deteção de obstáculos
O robô está equipado
com um conjunto de sensores de sonar para detetar obstáculos.
O robô reduzirá a velocidade se os sonares
de deteção identificarem um obstáculo.
Deteção de obstáculos
por sensores de sonar
G525070
Se o robô estiver
sempre a deslocar-se numa velocidade reduzida, mesmo que não
haja obstáculos visíveis, significa que há
um problema com os sensores. Neste caso, deve entrar
em contacto com a equipa de manutenção para obter ajuda
na análise do problema.
Para-choques
O para-choques é um sensor
de pressão que deteta quando o robô toca num obstáculo.
Quando o para-choques toca num obstáculo,
o robô mover-se-á para trás e irá rodar
através de um ângulo até poder evitar o obstáculo.
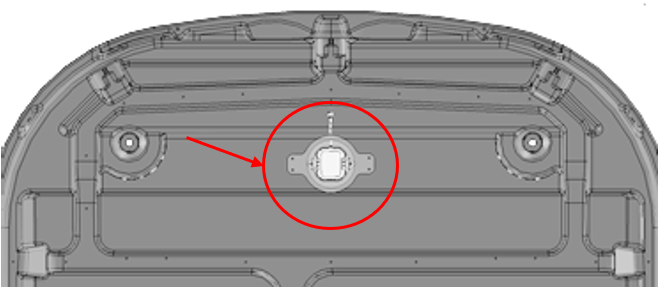
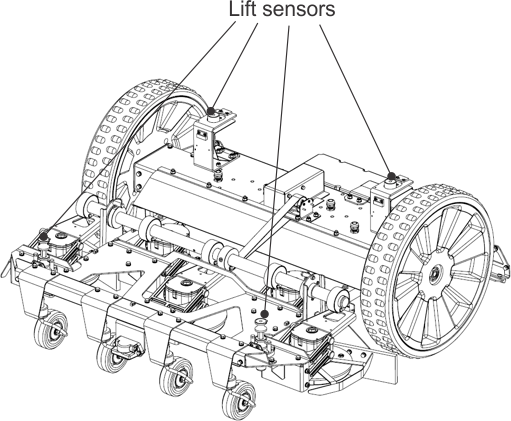
Sensores de elevação e de deslocamento da estrutura
Localização dos acessórios
de sensores de elevação
G538312
-
Acessórios de sensores de
elevação
Sensores de elevação
(ilustração da série 500)
G525072
Os sensores de elevação
estão encaixados na estrutura do robô, em 4 localizações
distintas. Se o robô tocar num objeto baixo,
que empurra o corpo do robô para cima, ou se alguém
tentar levantar o robô, os sensores de elevação irão
reagir. O robô parará de cortar
e mover-se-á para trás. Se este movimento libertar o obstáculo
da estrutura, o robô executará uma manobra para evitar
o objeto e continuar a cortar. Caso contrário,
o robô registará um alarme após 10 segundos e permanecerá
em modo de segurança (estacionário)
até que o obstáculo seja removido.
Bobina
A
bobina de indução detete a intensidade do campo magnético
que é gerado dentro do fio periférico. A intensidade máxima
está localizada no fio, que faz com
que o robô pare, rode e continue a cortar numa nova direção.
Sensor de inclinação
O sensor de inclinação
deteta o ângulo de inclinação em que o robô se
encontra. É emitido um alarme e o robô para de se mover
se o ângulo de inclinação
for excedido.
Sensor de capotamento
O sensor de capotamento deteta
se o robô capotou ou se alguém está a tentar ligar
o motor quando o robô está de pernas para
o ar.
Sensor de temperatura
O sensor de temperatura mede a
temperatura do ambiente e irá impedir que o robô funcione
se a temperatura for demasiado baixa. A
temperatura mínima na qual o robô pode funcionar está
definida como um parâmetro de funcionamento.
Recetor GPS RTK
Este sensor recolhe dados de satélites
para definir a localização global exata do robô.
Acessórios
Está disponível uma
seleção de acessórios aprovados pela Toro para utilização
com a máquina, para melhorar e expandir as suas capacidades.
Contacte o seu representante de assistência
autorizado ou distribuidor autorizado Toro ou visite www.Toro.com para obter uma lista de
todos os acessórios aprovados. Para assegurar o desempenho ideal
e certificação de segurança continuada da máquina,
utilize sempre peças de substituição
e acessórios genuínos Toro.
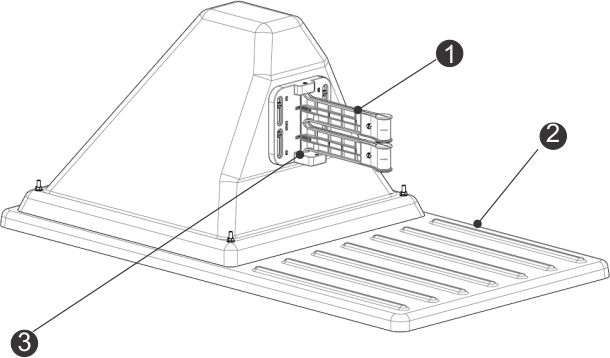
Apresentação da estação de carregamento
Nota: Ilustração do modelo 303914EU. O aspeto varia ligeiramente
de acordo com o modelo. Consulte o manual de carregamento para
mais informações.
Componentes da estação de carregamento
G520730
- Braços
de carregamento
- Base
- Sensor
de ocupação
Vista traseira da estação
de carregamento
G537669
- Indicadores
LED Za
- Indicadores
LED ZL
- Placa
de identificação
- Autocolante
- Entrada
do cabo de alimentação
Vista de baixo da estação
de carregamento
G538193
- Entrada
do cabo periférico
Indicadores LED
Os indicadores LED apresentam
o estado atual de cada fio. Consulte a tabela seguinte.
| Verde a piscar
|
O fio está a funcionar normalmente. |
| Vermelho a piscar |
Nenhum fio periférico detetado.
O fio pode ter sido cortado ou é demasiado comprido. |
| Vermelho opaco
|
Indica um problema. O fio pode
ser demasiado curto (menos de 200 m) ou um problema com a vertente
eletrónica. |
Os LED estão rotulados da
seguinte forma:
- ZL: Fio para a zona em loop da
estação
- Za: Fio para a área de funcionamento
A
- Zb: Fio para a área de funcionamento
B
Nota: Se estiver a utilizar uma estação de carregamento com vários
loops e não estiver a utilizar um dos loops, o LED piscará
na cor vermelha. Para fazer com que o LED
pare de piscar na cor vermelha, mude o canal da placa para 9.
Especificações
Nota: As especificações e o design estão sujeitos a alterações
sem aviso prévio.
Capacidade
| Área máxima de trabalho
[m2]
|
75.000 m2 (18,5 acres) |
75.000 m2 (18,5 acres) |
45.000 m2 (11,1 acres) |
| Área recomendada de trabalho
[m2]
|
55.000 m2 (13,6 acres) |
55.000 m2 (13,6 acres) |
35.000 m2 (8,6 acres) |
| Largura de corte [mm] |
1033 mm (40,7 pol.) |
1033 mm
|
633 mm
|
| Velocidade de trabalho [km/h] |
3,6 km/h
|
3,6 km/h
|
2,8 km/h
|
| Inclinação máxima
[%] |
45% (24°)
|
30% (17°)
|
35% (19,5°)
|
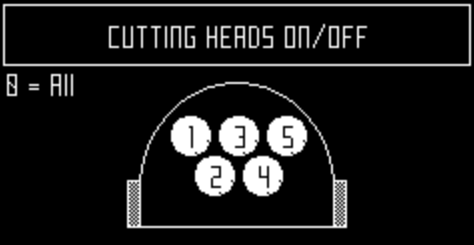
Corte
| Número de cabeças de
corte |
5
|
3
|
| Número de lâminas de
corte |
15
|
9
|
| Altura de corte mínima (disco
de série / disco de altura baixa)
|
20 mm / 15 mm(0,8/0,6 pol.) |
20 mm / 15 mm (0,8/0,6 pol.) |
| Altura de corte mínima (disco
de série / disco de altura baixa)
|
100 mm / 90 mm(3,9/3,5 pol.) |
100 mm / 90 mm (3,9/3,5 pol.) |
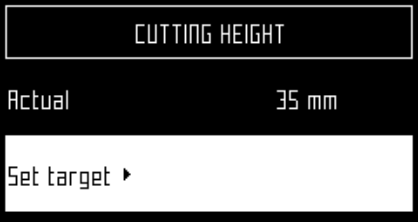
| Ajuste das cabeças de corte |
Eletrónico
|
Eletrónico
|
| Nível máximo de ruído
(medido a 5 m) |
52 db(A)
|
52 db(A)
|
Bateria
| Tipo
|
LIFePo4
|
LIFePo4
|
| Tensão normal [V] |
25,6 V
|
25,6 V
|
| Capacidade nominal [Ah] |
19,0 Ah
|
19,0 Ah
|
| Energia [Wh]
|
486,4 Wh
|
486,4 Wh
|
| Intervalo da temperatura de funcionamento |
-5°C a +60°C |
-5°C a +60°C |
| Tempo de corte médio [min.] |
110
|
280
|
| Tempo médio para carga completa
[min.] |
90
|
90
|
Peso e dimensões
| Peso [kg]
|
71 kg(156,5 lb)
|
52 kg
|
| Comprimento [mm]
|
1110 mm (43,7 pol.) |
1002 mm
|
| Largura [mm]
|
1278 mm (50,3 inches) |
1044 mm
|
| Altura [mm]
|
515 mm (20,2 pol.) |
466 mm
|
Software e monitorização
| Código PIN de segurança |
Sim
|
Sim
|
| Localização GPS |
RTK
|
RTK
|
| Gestão do robô através
de servidor e app. |
De série
|
De série
|
Inteligência
| Deteção de obstáculos
com sonar |
Várias
|
Várias
|
| Regresso à estação
através de GPS |
Sim
|
Sim
|
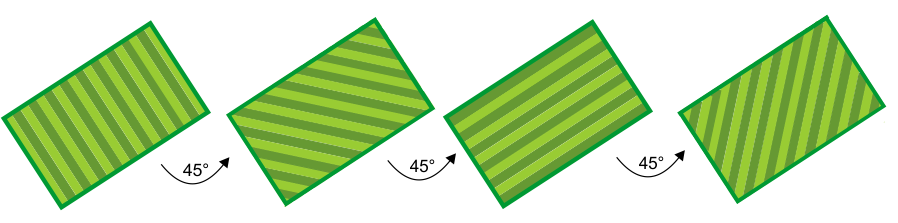
| Tipo de corte
|
Padronizado
|
Padronizado
|
| Várias zonas de arranque |
Sim
|
Sim
|
| Vários campos (opcional) |
Sim
|
Sim
|
| Vários robôs/estações |
Não
|
Não
|
| Sonares para deteção
de obstáculos |
5
|
5
|
| Para-choques resistente contra
colisões |
1
|
1
|
| Sensores de elevação
frontal |
2
|
2
|
| Sensores de elevação
traseira |
2
|
2
|
| Sensores de colisão traseiros |
2
|
2
|
| Sensor de capotamento / inclinação |
1
|
1
|
| Defletores para cabeças de
corte |
2 (1 para cada cabeça de
corte exterior) |
Nenhum
|
Manutenção
Visão geral da manutenção
- Manutenção refere-se
ao conjunto de tarefas que devem ser efetuadas regularmente durante
uma temporada de corte.
- O intervalo de manutenção
depende, em certa medida, na carga operacional do seu robô, mas
é recomendado que seja objeto de manutenção
por um técnico autorizado pelo menos uma vez por ano.
- Enquanto efetua a manutenção
do seu robô para obter um desempenho otimizado, não tente
efetuar alterações ao seu robô. Corre
o risco de comprometer o seu funcionamento, causando
um acidente ou danificando peças.
Nota: Se notar qualquer comportamento ou dano anormais, contacte um técnico.
- Quando levar a cabo estes procedimentos
de manutenção, os regulamentos de segurança seguintes
devem ser tidos em conta:
- Pare a máquina: desligue
sempre a alimentação e aguarde até que todas as peças
móveis parem antes de manusear a máquina.
- Acione o dispositivo de desativação
antes de efetuar o seguinte:
- Antes de trabalhar na máquina
ou antes de levantá-la.
- Antes de limpar uma obstrução.
- Antes de examinar, limpar ou trabalhar
na máquina.
- Após atingir um objeto desconhecido
para inspecionar a máquina relativamente a danos.
- Se a máquina começar
a vibrar de um modo estranho.
- Guarde todas as porcas e parafusos
para se assegurar de que a máquina funcionará em perfeitas
condições.
- Utilize luvas: deve utilizar luvas
de proteção sempre que efetuar tarefas de manutenção
na máquina.
- Utilize sempre peças OEM
(equipamento original do fabricante). Além de o risco de acidentes,
a utilização de peças que não
sejam OEM pode resultar na anulação
da garantia independentemente dos danos.
Programa de manutenção
recomendado
Nota: Estes procedimentos devem ser levados a cabo na frequência recomendada
pelo utilizador regular do robô.
Nota: Ao longo da temporada de corte, deve verificar regularmente se todos
os parafusos e porcas estão devidamente apertados. Aperte
todos os que não estiverem devidamente apertados,
e se houver danos ou evidências de problemas, entre em contacto
com um distribuidor autorizado da Toro.
| Antes de cada utilização
ou diariamente |
|
| A cada 40 horas |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| Cada 6 meses |
|
| |
| Anualmente ou antes do armazenamento |
|
| |
Manutenção da unidade
de corte
Inspeção da unidade
de corte
-
Inspecione
as lâminas, os parafusos das lâminas e o conjunto do disco
de corte todas as semanas para manter uma funcionalidade
de corte adequada.
Substituição das lâminas
de corte
A condição das lâminas
de corte é essencial para um funcionamento de corte satisfatório.
A manutenção da vida útil das lâminas
depende de vários fatores. As peças para
o conjunto dos discos de corte devem ser substituídas sempre
que estiverem danificadas.
 |
Aviso |
|
As lâminas são afiadas;
tocar nas lâminas pode resultar em morte ou ferimentos graves.
Seja
cuidadoso quando substituir ou limpar as lâminas.
-
Rode o disco
de forma a que a cabeça do parafusos que prende a lâmina
fique visível.
-
Remova a
lâmina removendo o parafuso.
-
Instale a
nova lâmina e aperte o parafuso.
Nota: Após qualquer intervenção nas cabeças de corte,
rode cada uma delas de forma independente e verifique se rodar uma
cabeça não faz com que
as outras também rodem.
Visão geral da substituição
das lâminas
A
frequência com que as lâminas precisam de ser substituídas
depende do tipo de robô, da sua utilização e do solo
em que opera. Uma vez que as condições
das lâminas é essencial para um corte satisfatório,
é recomendado que verifique esta peça do seu
robô todas as semanas após a instalação
e no início de cada nova temporada de corte.
O pantógrafo
permite que a lâmina siga as curvas do solo. Se o pantógrafo
não funcionar corretamente, as lâminas podem dobrar-se
ou partir-se. O pantógrafo deve ser verificado
e limpo regularmente.
Consulte a seguinte lista de formas
que permitem prolongar a vida útil das suas lâminas de corte.
- Certifique-se de que o terreno
é plano. Se o terreno tiver depressões, a cabeça de
corte pode não ser capaz de seguir os contornos
do terreno e as lâminas batem no solo. Tente
nivelar o terreno e, se necessário, excluir partes irregulares
da área de corte.
Nota: Podem aparecer regos juntos da estação de carregamento.
Por isso, é recomendado nivelar o solo junto da estação
ou colocar relva artificial.
- Remova montículos. Quando
os robôs embatem em montículos, as lâminas abrandam
ou param. Após passar o montículo, a lâmina
volta para a velocidade normal. A resistência
da terra e as mudanças de velocidade podem desapertar os parafusos
(ou danificar os furos dos parafusos).
- Evite partes sem relva. A presença
de partes sem relva em zonas com relva irão causar a mudança
da velocidade rotacional. Se esta alteração
de velocidade ocorrer demasiadas vezes, pode danificar a articulação
e o furo do parafuso. Para evitar este
problema, pode aumentar a altura de corte de forma a que o robô
corte menos relva e as diferenças de velocidade sejam diminuídas.
Como alternativa, é possível
semear relva nas partes sem relva.
- Evite o contacto com o marcador
de solo em nylon. Estes cegam as lâminas. É recomendado
diminui-las para baixo da sua altura
de corte.
- Evite obstáculos sólidos
na relva. Inclui aspersores, pedras e raízes. As pedras e outros
objetos móveis devem ser removidas.
Para evitar objetos sólidos permanentes, como aspersores,
defina a altura de corte de forma a que seja superior ao obstáculo,
ou adapte a área de corta à
sua volta.
Nota: As balizas removíveis são outro exemplo de obstáculo
sólido que não pode ser detetado pelo robô. Certifique-se
de que são removidas antes de
programar o corte.
- Remova todas as ervas altas junto
do fio periférico. As plantas altas e resistentes podem danificar
ou cegar as lâminas. Posto isto,
é preferível manter a área à volta dos seus fios
periféricos limpa.
Limpeza
Limpeza da máquina
Durante períodos chuvosos,
é necessário garantir que a lama e relva não se acumulam
nas peças móveis, que são as rodas e as
cabeças de corte. Estas peças devem ser inspecionadas
e limpas diariamente.
-
Prima o botão
vermelho para parar o robô.
-
Coloque a
máquina sobre a sua traseira.
-
Desligue
a máquina.
-
Remova o
acúmulo de relva e sujidade com um soprador, ar comprimido e/ou
uma escova de arame.
-
Esfregue
a estrutura com um pano ou esponja húmida e macia.
-
Se a estrutura
estiver muito suja, utilize uma solução com sabão.
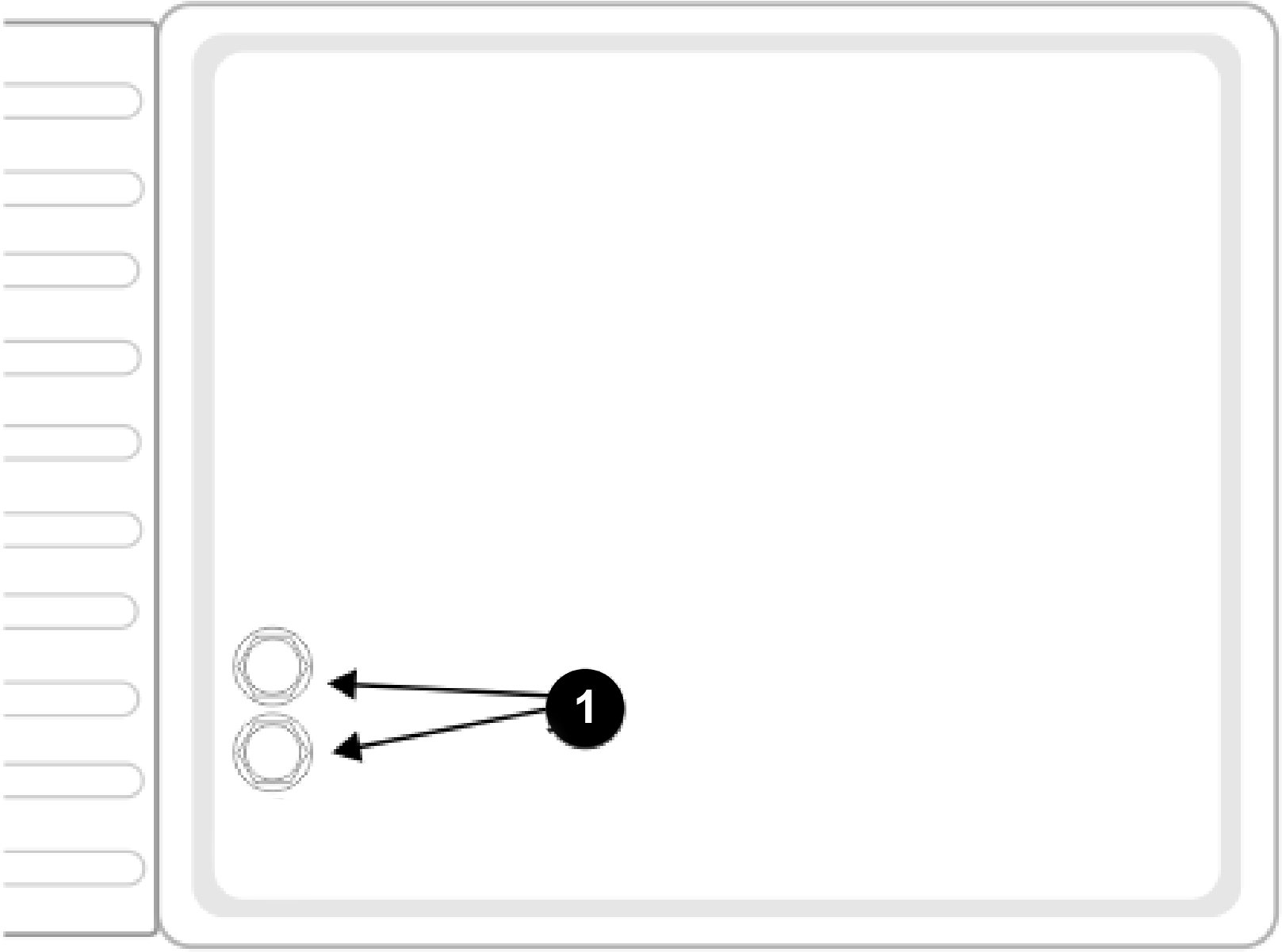
Limpeza dos contactos de carregamento
-
Esfregue
os contactos de carregamento com uma lixa (grão 280) até
ficarem limpos.
Limpeza do para-choques
-
Verifique
se o material do para-choques está intacto. Se observar cortes
ou rasgões, entre em contacto com um representante
autorizado da Toro.
-
Limpe o para-choques
com um pano húmido.
Limpeza dos sensores de sonar
Os sensores de sonar devem estar
sempre limpos para funcionarem corretamente. Todos os sensores devem
funcionar corretamente. Se algum dos sensores
não funcionar corretamente, é emitido um alarme.
-
Remova a
lama, relva ou sujidade e limpe com um pano húmido.
Limpeza das rodas frontais
-
Remova a
lama e a relva com uma escova de arame ou um pano..
-
Verifique
se as rodas rodam livremente e que não há nenhum problema.
Se existir demasiada folga, substitua as rodas.
Limpeza do eixo das rodas frontais
-
Limpe o eixo
das rodas frontais com uma escova e/ou um pano.
-
Inspecione
visualmente o eixo. Se existir um problema, substitua o eixo.
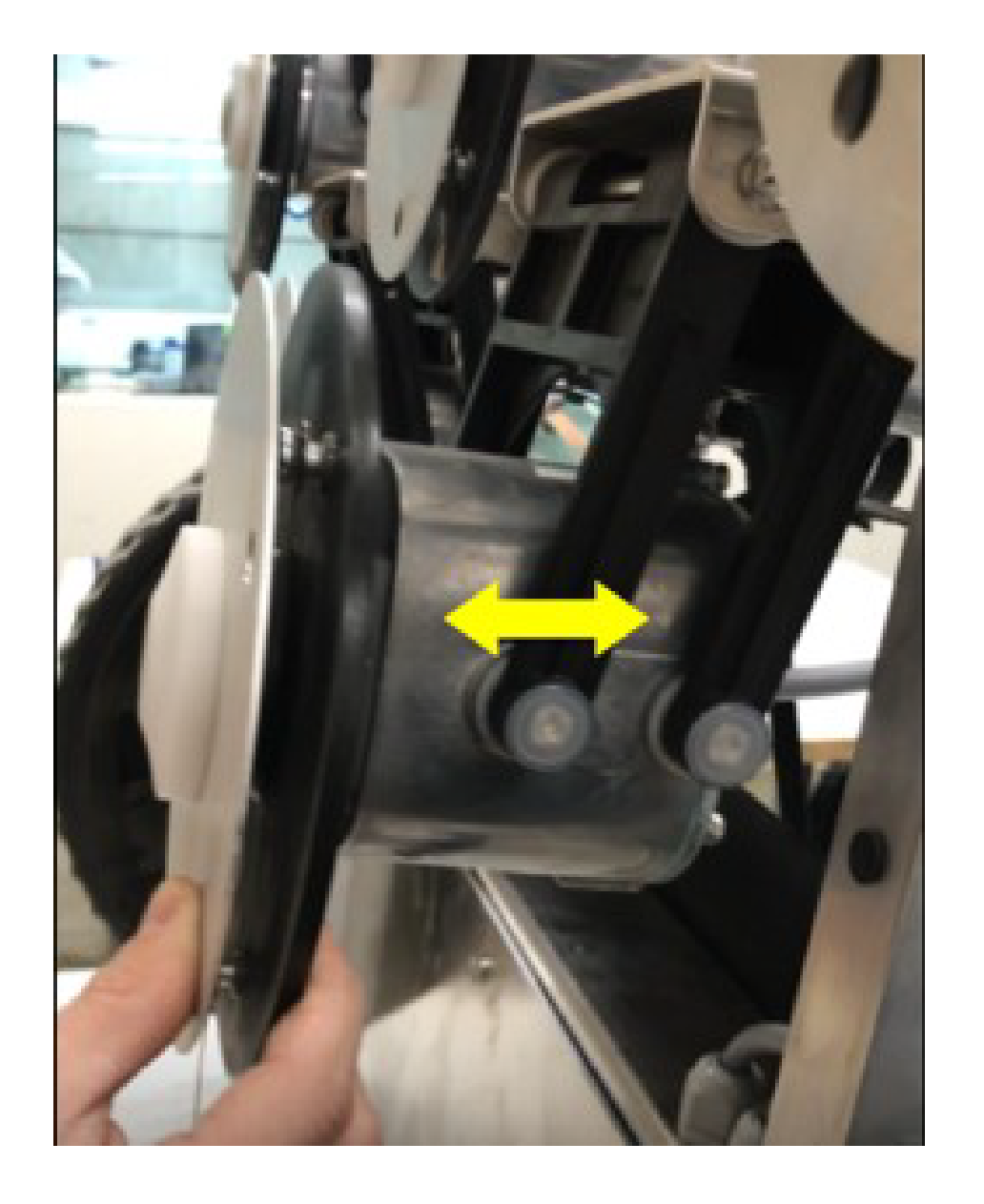
Limpeza da cabeça de corte
-
Limpe a cabeça
de corte utilizando uma escova. Se tiver ar comprimido à sua
disposição, é preferível utilizá-lo.
-
Verifique
se a cabeça de corte se move corretamente para a frente e para
trás, conforme mostrado pela seta na figura que se
segue.
Limpeza do disco de corte
Este procedimento deve ser realizado
semanalmente. Este procedimento é importante se a altura de corte
estiver configurada em 25 mm (0,98 pol.) ou
menos. Se for o caso, o desgaste do disco de antifricção
é aumentado e precisará de ser substituído,
pelo menos, a cada 2 meses.
-
Limpe o disco
de corte utilizando uma escova. Se tiver ar comprimido à sua
disposição, é preferível utilizá-lo.
-
Verifique
se o disco de corte roda corretamente. Se existir um problema, substitua
os discos de corte.
Limpeza das rodas traseiras
-
Remova a
lama e a relva com uma escova de arame.
Manutenção do sistema
elétrico
Verificação dos fios
-
Inspecione
visualmente os fios por baixo do robô. Se identificar algum problema,
entre em contacto com um distribuidor autorizado
da Toro.
Manutenção da bateria
O funcionamento
automático (programado) do robô prolonga a vida útil
da bateria. É aconselhado permitir que o robô gira os
seus ciclos de trabalho. Se estes ciclos de
trabalho forem anormalmente curtos, entre em contacto com um distribuidor
autorizado da Toro para verificar as condições
da bateria.
Nota: É possível monitorizar estes ciclos através do portal.
Glossário
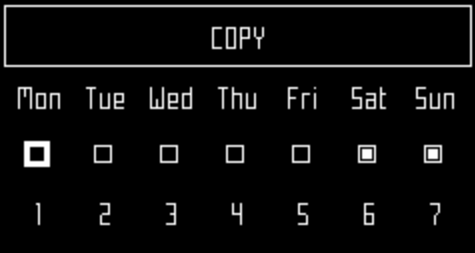
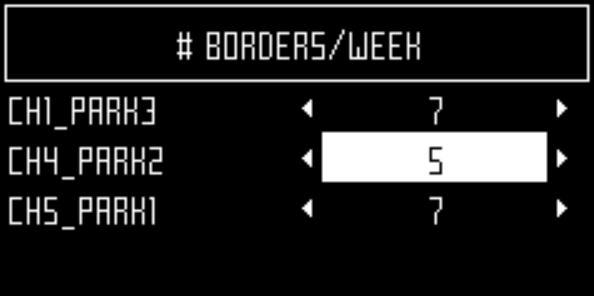
Modo limítrofe
Quando o robô
corta a relva na borda do campo. Este procedimento é efetuado
várias vezes por semana.
Ciclo
Um ciclo corresponde a
uma sessão de trabalho do robô. O ciclo começa quando
o robô abandona a estação e termina quando regressa
à estação ou quando há um problema
que interrompe o ciclo.
Entidade
Uma coleção de
robôs e utilizadores que operam dentro de uma instalação.
As informações sobre os robôs numa entidade podem
ser visualizadas no portal Web.
Zona de navegação GPS
Esta é
uma zona GPS RTK que está definida por um processo de descoberta
de limite. Inclui a totalidade da área de trabalho.
Assim, podem ser criadas subzonas copiando e editando esta
zona para otimizar a eficiência do robô.
Ponto GPS
Um ponto específico
dentro de uma parcela que o robô utiliza para regressar ou sair
da estação. O ponto é definido pela sua
latitude e longitude. O robô assume uma rota direta para
este pontos e depois segue para a faixa do limite e para o fio em
loop para regressar à estação.
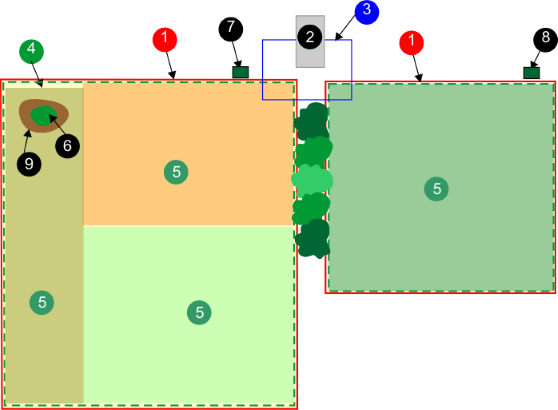
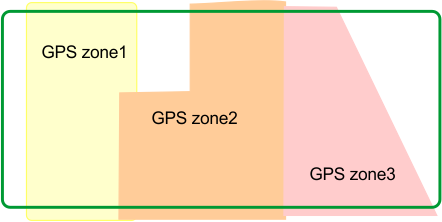
Zona GPS
A Zona GPS é definida
pelo conjunto das coordenadas GPS. Isto permite-lhe dividir uma parcela
com fio sem ter de utilizar fios e canais adicionais.
Zonas GPS numa parcela com fio
G520046
Isto fornece uma flexibilidade
superior ao definir áreas de trabalho, uma vez que o robô
pode ser programado para funcionar com eficiência
otimizada nestas zonas.
Ralenti
Um robô entrará
no modo ralenti se a tarefa atual for terminada com o Botão de
paragem. Por definição, o robô irá entrar no
modo de suspensão.
Ilha
Um loop no fio periférico
particularmente instalado para evitar que o robô trabalhe dentro
dele. O fio periférico é passado à
volta do obstáculo e os fios de aproximação e regresso
são colocados um ao lado do outro.
Mapa
Mapa das rotas dos robôs
no portal.
Mapeamento
As informações
acumuladas pelo robô utilizando dados GPS.
Zona proibida
As zonas proibidas
definidas por GPS são regiões do campo definidas por coordenadas
GPS onde o robô nunca pode entrar durante os
seus estados de funcionamento autónomo. As zonas proibidas definidas
por GPS são utilizadas para excluir zonas da área
de trabalho do robô que não podem ser detetadas
durante a descoberta de limites. A utilização de zonas proibidas
definidas por GPS permite que o robô calcule
o padrão de corte mais eficiente com antecedência. As zonas
proibidas definidas por GPS são utilizadas
para excluir obstáculos, normalmente feito em ilhas e pseudo-ilhas.
Obstáculo
Um objeto no
campo que o robô deve evitar. Os obstáculos podem ser permanentes
(p. ex.: árvores, móveis) ou transitórios (p.
ex.: animais). Os obstáculos são detetados
pelos sensores. Os obstáculos permanentes podem ser evitados
efetuando loops no fio periférico para formar
"ilhas” ou "pseudo-ilhas".
Parcela
Uma área a ser cortada
dentro de um fio periférico. Pelo menos uma parcela está
associada a um fio. Podem ser definidas várias
parcelas.
Percentagem
Isto representa a proporção
de tempo que o robô irá dedicar trabalhando numa parcela
em particular. Se só existir uma parcela, o
robô irá dedicar 100% do seu tempo a essa parcela.
Fio periférico
Um fio passado
por baixo da superfície do campo que define a área em que
o robô trabalha. A área definida pelo fio periférico
é designada de "parcela".
Pseudo-ilha
O fio periférico é
passado à volta do obstáculo, mantendo uma distância
específica entre os fios de aproximação e regresso.
Valores dos estados do robô
- Desligado (Off)
O robô foi desligado.
- Desligado após alarme
O robô desliga-se após
um alarme.
- Alarme
O robô está num estado
de alarme.
- Permanecer
O robô está à espera
na estação de carregamento.
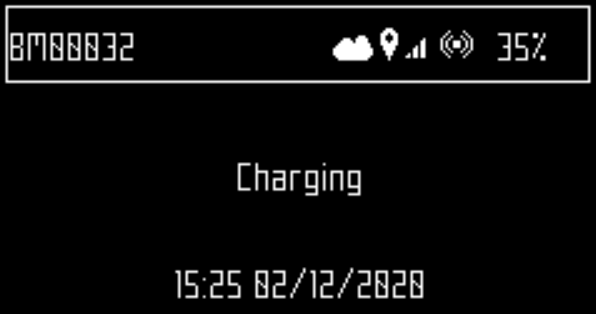
- A carregar
O robô está a carregar
a bateria
- A dirigir-se para descarregar
na estação
O
robô está a dirigir-se para descarregar bolas. Este estado
começa quando o robô decide regressar à estação.
- A dirigir-se para a estação
de carregamento
O robô
está a dirigir-se para a estação de carregamento. Este
estado começa quando o robô decide regressar à estação.
- A abandonar estação
O robô está a abandonar
a estação para iniciar o trabalho.
Zona GPS RTK
A área de trabalho
para um robô efetuar um corte em padrão. A zona GPS RTK
é definida pelo robô que efetua o trajeto do fio
periférico.
Instalação
A área
total que inclui a área em que o robô trabalha.
Suspensão
O robô
entra no modo de suspensão 15 minutos após ocorrer um alarme
que não foi resolvido. Após 2 dias no modo de suspensão,
o robô entrará no modo OFF (desligado).
Isto também ocorre quando o nível da carga da bateria fica
baixo. No modo de suspensão, o robô utiliza
o mínimo de energia para reduzir o risco de danos na bateria.
O robô
pode sair do modo de suspensão:
- parando o alarme e ligando o robô
através do botão no ecrã LED
- empurrando o robô para a
estação de carregamento, se a bateria acabar
- enviando um comando de "despertar"
remoto através do portal Web
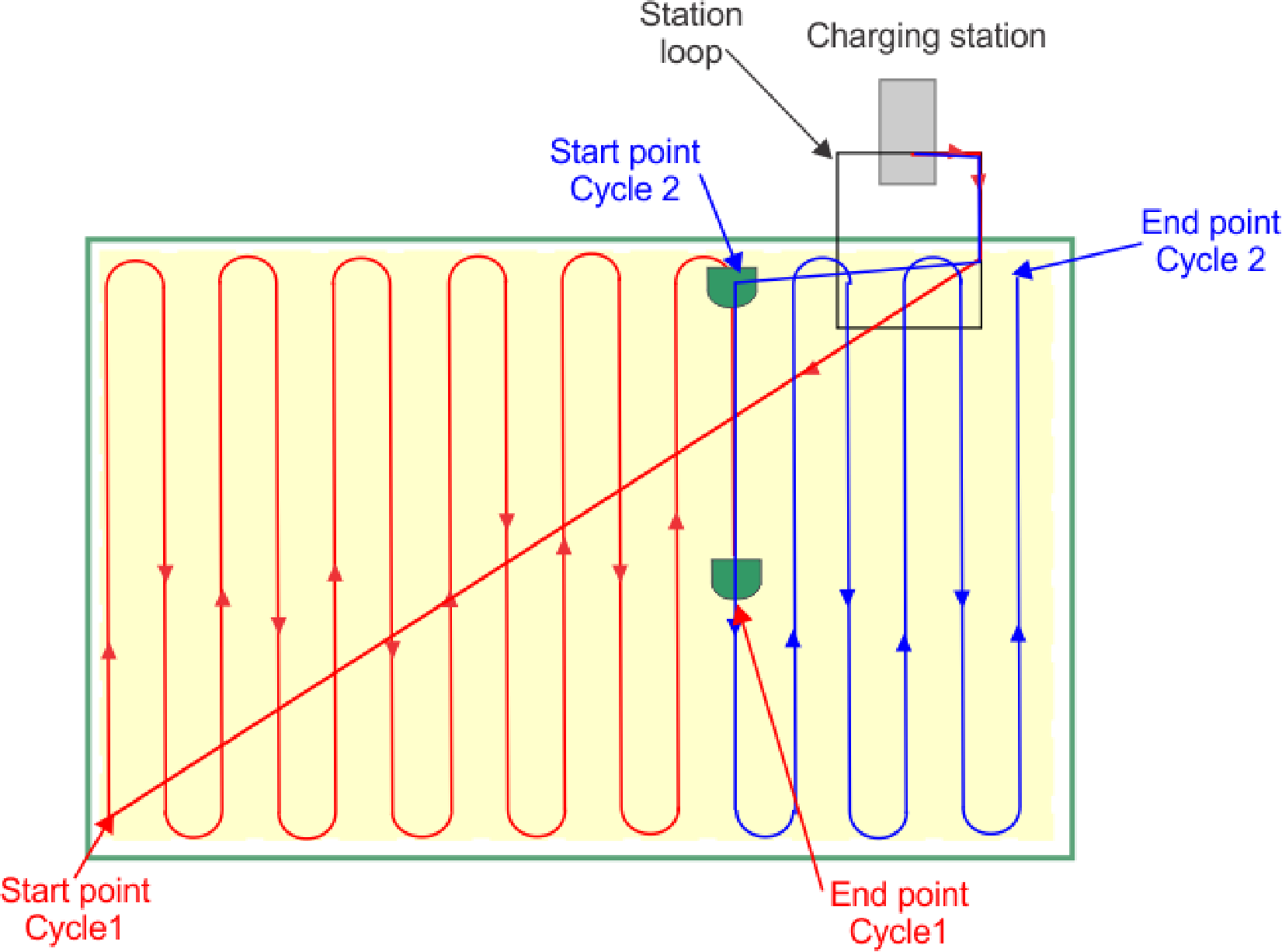
Estação em loop
Uma estação
em loop é um fio curto à volta da estação de carregamento
que é utilizada para guiar o robô para a estação.
Quando o robô deteta que está numa estação
em loop, o robô segue o fio até chegar à estação.
Terreno
Uma área de relva
à volta do campo que não é para ser cortada.
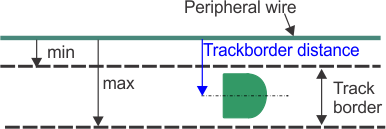
Faixa limite (Track border)
Uma faixa de
relva à volta do limite da parcela em que o robô trabalha.
O robô segue a faixa limite quando sai ou regressa
a uma estação, exceto se utilizar GPS. Não
existe uma faixa limite especificada para um fio que age como um "voltar
para a estação em loop".
Faixa limite (Track border)
G525155
A faixa limite fica junto do fio
periférico, e é definida por dimensões mínimas
e máximas como parâmetros de instalação. É
mais larga que o robô. O caminho feito pelo
robô dentro da faixa limite é selecionado de forma aleatória.
Isto garante que o robô não se move repetidamente
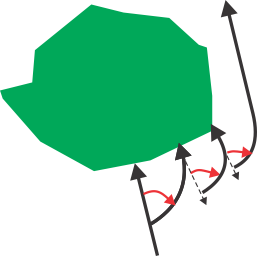
ao longo do mesmo caminho e cria sulcos no campo. Se o robô se
deparar com um obstáculo enquanto está
na faixa limite, os sensores irão reverter a sua direção
e depois roda ao longo de um ângulo aleatório para continuar.
Se necessário, isto pode ser repetido várias
vezes.
Manobras para evitar um obstáculo
dentro da faixa limite.
G520315