Productoverzicht
Productoverzicht Turf Pro serie robotmaaier
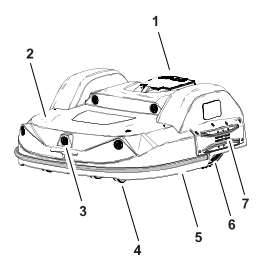
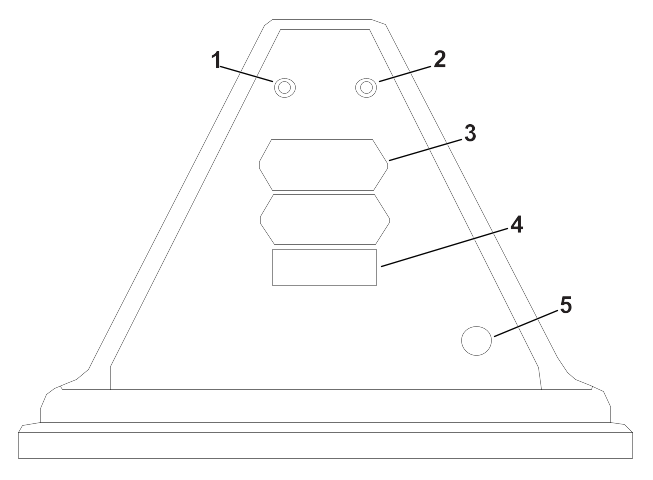
Bovenaanzicht
G538206
-
Stopknop
-
Behuizing
-
Sonars voor de detectie van obstakels
-
Voorwielen
-
Bumper
-
Achterwielen
-
Laadcontacten
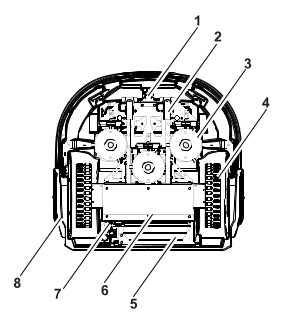
Onderaanzicht(300 model)
G538280
-
Spoel
-
Voorwielen
-
Maaikoppen
-
Achterwielen
-
Accu
-
Verzegelde elektronische doos
(smartbox)
-
Voedingsschakelaar
-
Laadcontacten
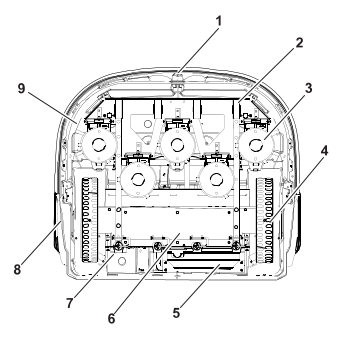
Onderaanzicht(500 model)
G529049
-
Spoel
-
Voorwielen
-
Maaikoppen
-
Achterwielen
-
Accu
-
Verzegelde elektronische doos
(smartbox)
-
Voedingsschakelaar
-
Laadcontacten
-
Beschermschijf
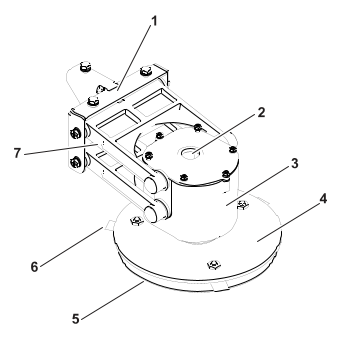
Maaikop
G526500
-
Beugel
-
Kabeldoorvoer
-
Motorbehuizing
-
Steunschijf maaimessen
-
Antifrictieschijf
-
Mes
-
Pantograaf
Opmerking: De steunschijf voor de maaimessen , de antifrictieschijf
, de antifrictieschijf en de maaimessen
en de maaimessen worden samen de 'maaischijf’ genoemd.
worden samen de 'maaischijf’ genoemd.
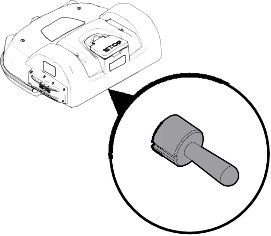
Aan-uitschakelaar (300 model)
|
De aan-uitschakelaar bevindt zich
onder de behuizing aan de linkerkant achteraan van de robot. Zet de aan-uitschakelaar naar
rechts (in de stand AAN) om de
robot te gebruiken. Zet de aan-uitschakelaar naar
links (naar de stand UIT) als
de robot langere tijd niet wordt gebruikt of in de winter wordt opgeslagen. |
Aan-uitschakelaar (500 model)
 |
De aan-uitschakelaar bevindt zich
onder de behuizing aan de rechterkant achteraan van de robot. Zet de aan-uitschakelaar omhoog
(in de stand AAN) om de
robot te gebruiken. Zet de aan-uitschakelaar naar
beneden (naar de stand UIT) als
de robot langere tijd niet wordt gebruikt of in de winter wordt opgeslagen. |
RTK gps-antenne
G519918
Dit is een specifieke GNSS-antenne
die vooraan in het midden van de behuizing is geïnstalleerd.
Ze wordt gebruikt om gegevens over de globale
positie van robot van satellieten te ontvangen.
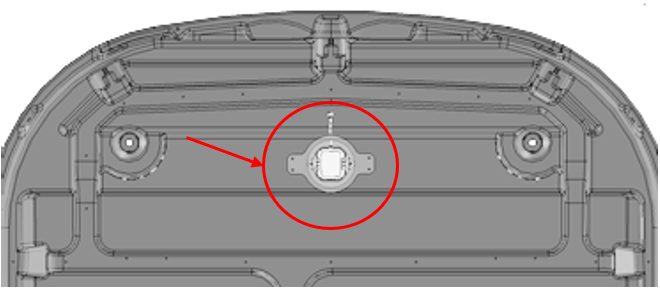
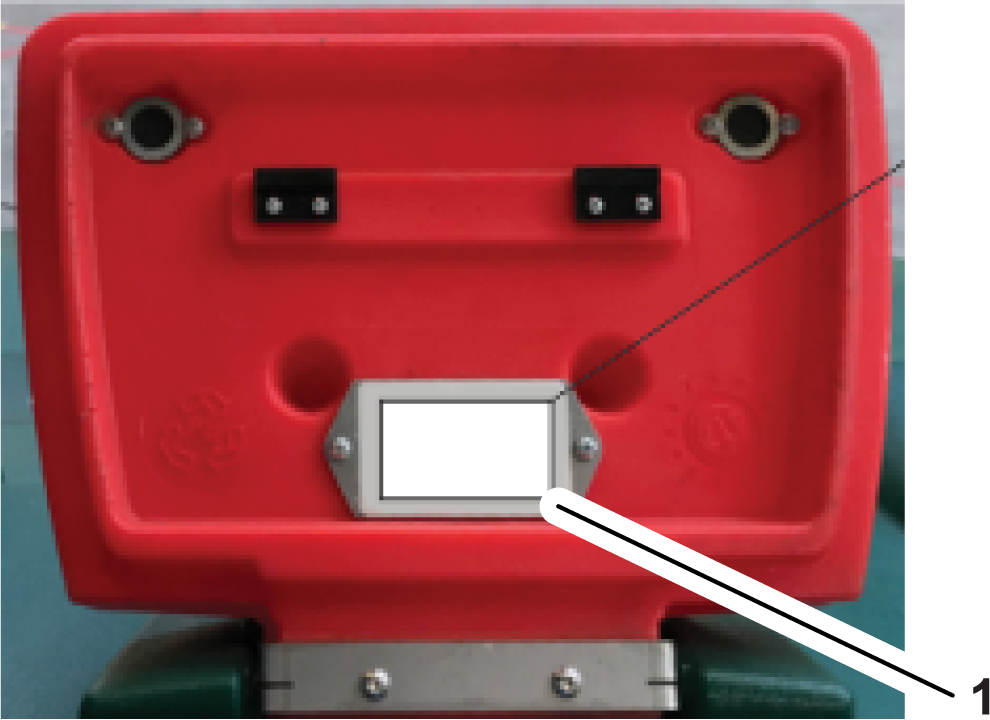
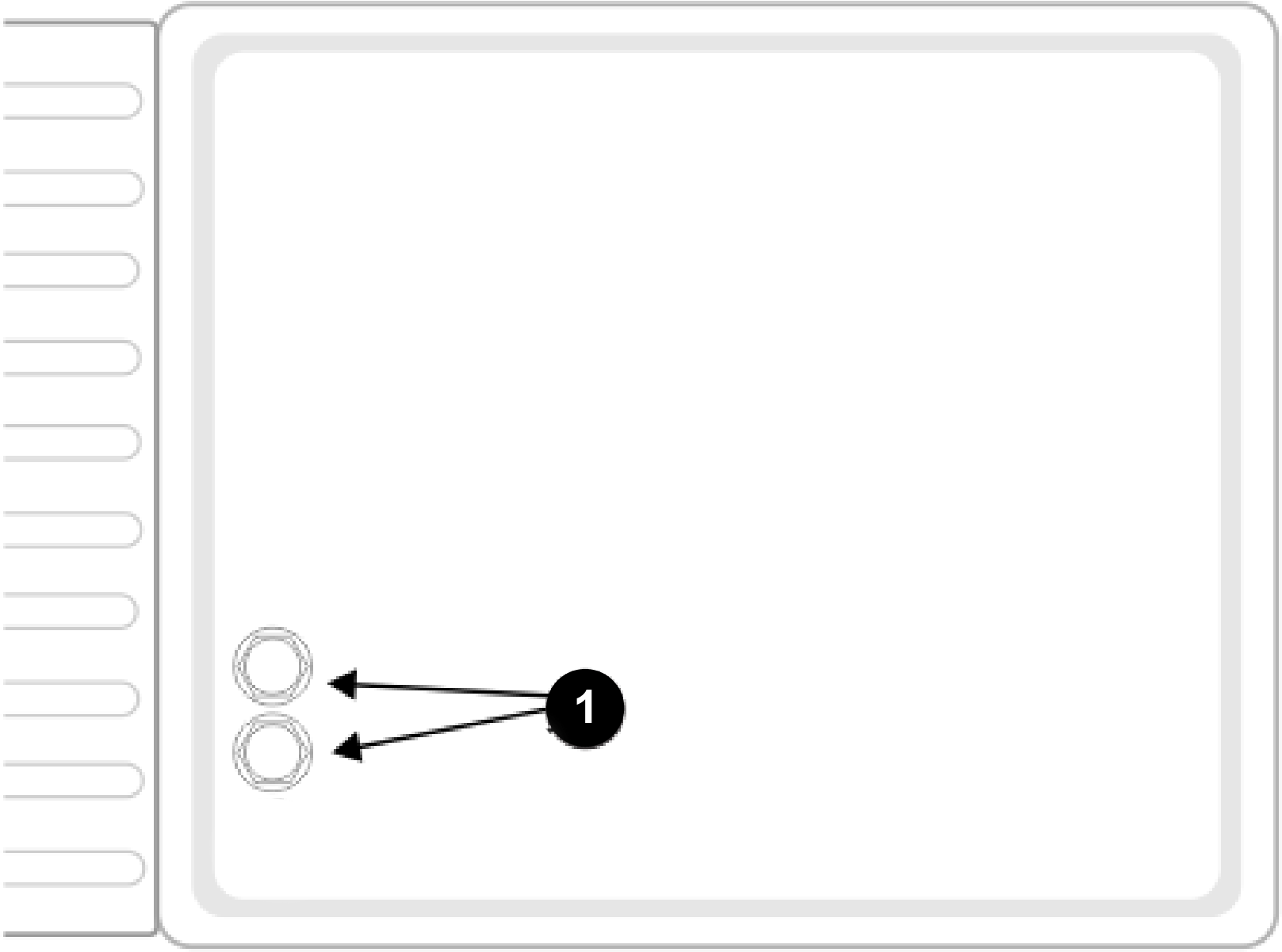
Plaatje met serienummer
Het
identificatielabel bevindt zich aan de binnenkant van het stopknopdeksel,
zoals hieronder afgebeeld.
G541779
-
Plaatje met serienummer
Overzicht sensoren
De machine is uitgerust
met een uitgebreid stel sensoren die voor een veilige werking zorgen.
Deze sensoren zorgen ervoor dat de robot kan
detecteren en reageren als er zich een obstakel op zijn pad bevindt.
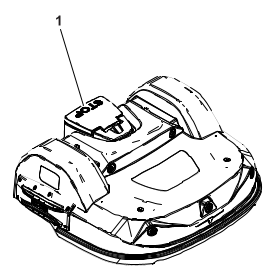
Stopknop
De stopknop  is makkelijk zichtbaar en bevindt
zich aan de bovenkant van de robot. Als u op deze knop drukt, stopt
de robot met bewegen en maaien. De stopknop
fungeert ook als een deksel, dat, wanneer deze wordt opgetild, toegang
geeft tot de gebruikersinterface van de
robot. Via deze gebruikersinterface moet een instructie worden gegeven
om de robot opnieuw te starten.
is makkelijk zichtbaar en bevindt
zich aan de bovenkant van de robot. Als u op deze knop drukt, stopt
de robot met bewegen en maaien. De stopknop
fungeert ook als een deksel, dat, wanneer deze wordt opgetild, toegang
geeft tot de gebruikersinterface van de
robot. Via deze gebruikersinterface moet een instructie worden gegeven
om de robot opnieuw te starten.
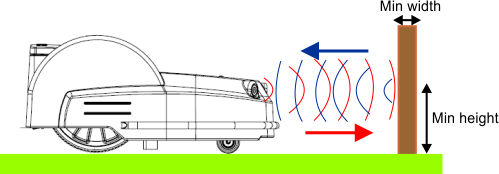
Sonars voor de detectie van obstakels
De robot is uitgerust met een
set sonarsensoren om obstakels te detecteren. De robot vermindert
snelheid als de sonardetectoren een obstakel
detecteren.
Detectie van obstakels door sonarsensoren
G525070
Als de robot altijd met
een lage snelheid beweegt, zelfs als er geen obstakels in zicht zijn,
duidt dit op een probleem met de sensoren.
In dit geval moet u contact opnemen met het serviceteam voor hulp
bij het analyseren van het probleem.
Bumper
De
bumper is een druksensor die detecteert wanneer de robot een obstakel
raakt. Wanneer de bumper het obstakel raakt, beweegt
de robot achteruit en draait dan in een hoek totdat
hij het obstakel kan ontwijken.
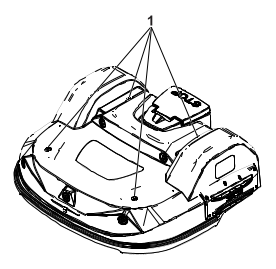
Hefsensoren en sensoren van de verplaatsing van de behuizing
Locatie van de bevestigingen van
de hefsensoren
G538312
-
Bevestigingen van de hefsensoren
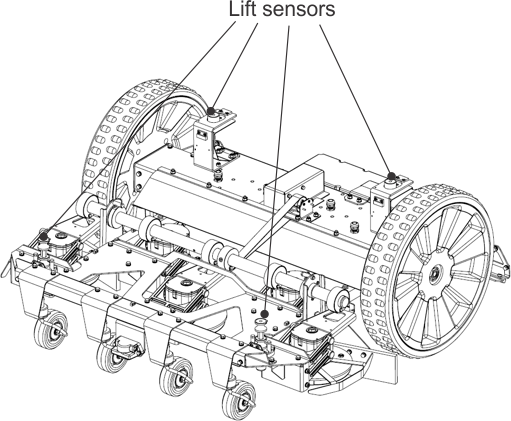
Hefsensoren (500 serie afgebeeld)
G525072
De hefsensoren zijn op
4 punten van de behuizing van robot bevestigd. Als de robot een laag
voorwerp raakt dat het koetswerk omhoogduwt
of als iemand de behuizing probeert op te tillen, zullen de hefsensoren
reageren. De robot stopt met maaien en
beweegt achteruit. Als deze beweging het obstakel van de behuizing
losmaakt, voert de robot een manoeuvre uit om het object
te ontwijken en gaat verder met maaien. Zo niet,
dan zal de robot na 10 seconden een alarm genereren en in de veilige
modus (stationair) blijven totdat het obstakel
is verwijderd.
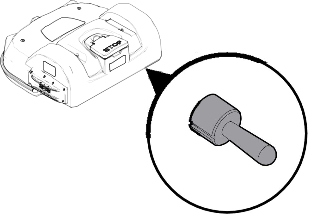
Spoel
De
inductiespoel detecteert de intensiteit van het magnetische veld dat
binnen de perimeterdraad wordt gegenereerd. De maximale
intensiteit bevindt zich op de draad waardoor de
robot stopt, draait, en vervolgens in een nieuwe richting verder maait.
Kantelsensor
De kantelsensor detecteert de
hoek van de helling waarop de robot werkt. Er gaat een alarm af en
de robot stopt met bewegen als de hoek
wordt overschreden.
Omrolsensor
De omrolsensor detecteert of de
robot ondersteboven gekanteld is of dat iemand de motor probeert te
starten wanneer de robot ondersteboven
staat.
Temperatuursensor
De temperatuursensor meet de omgevingstemperatuur
en voorkomt dat de robot werkt als deze temperatuur te laag is. De
minimumtemperatuur waarbij de robot kan
werken, wordt ingesteld als bedrijfsparameter.
RTK gps-ontvanger
Deze sensor verzamelt gegevens
van satellieten om de exacte locatie van de robot wereldwijd te bepalen.
Werktuigen/accessoires
Een selectie vanToro goedgekeurde werktuigen
en accessoires is verkrijgbaar voor gebruik met de machine om de mogelijkheden
daarvan te verbeteren en uit te breiden.Neem
contact op met uw erkende servicedealer of een erkendeToro distributeur, of bezoek www.Toro.com voor een lijst van alle
goedgekeurde werktuigen en accessoires.
Om de beste prestaties
te verkrijgen en ervoor te zorgen dat de veiligheidscertificaten van
de machine blijven gelden, moet u ter vervanging
altijd origineleToro onderdelen en accessoires aanschaffen.
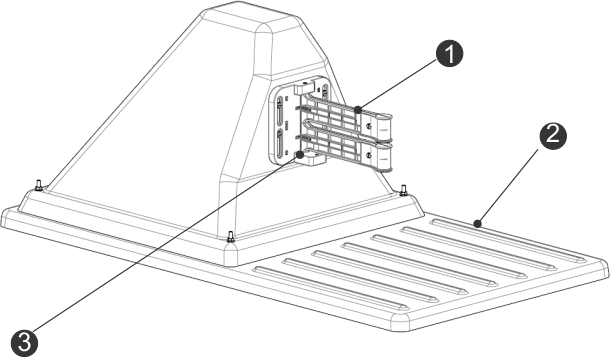
Overzicht laadstation
Opmerking: Model 30914EU afgebeeld. Het uiterlijk
varieert enigszins afhankelijk van het model. Raadpleeg de Handleiding
voor opladen voor meer informatie.
Onderdelen van het laadstation
G520730
- Laadarmen
- Basis
- Bezettingssensor
Achteraanzicht van het laadstation
G537669
- Za Ledindicator
- ZL Ledindicator
- Identificatielabel
- Sticker
- Ingang
voedingskabel
Onderaanzicht van het laadstation
G538193
- Ingang
perimeterdraad
Ledindicatoren
De ledindicatoren geven de huidige
status van elke draad aan. Raadpleeg de volgende tabel.
| Groen - knipperend |
De draad werkt normaal |
| Rood - knipperend |
Er kan geen perimeterdraad worden
gedetecteerd. De draad is mogelijk doorgesneden of is te lang. |
| Rood - ononderbroken |
Dit duidt op een probleem. De
draad kan te kort zijn (minder dan 200 m) of er is een probleem
met de elektronica. |
De leds zijn als volgt gelabeld:
- ZL: de draad voor de stationsluszone
- Za: de draad voor de werkzone
A
- Zb: de draad voor de werkzone
B
Opmerking: Als u een laadstation met meerdere
lussen gebruikt en u gebruikt een van de lussen niet, dan zal de led
rood knipperen. Om de led te laten stoppen
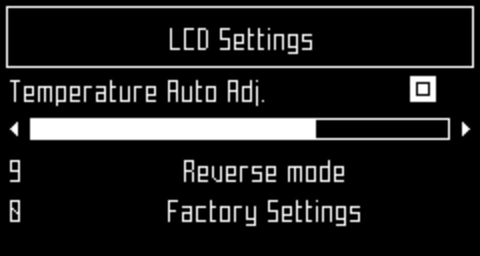
met rood knipperen, zet u het kanaal op het bord op 9.
Specificaties
Opmerking: Specificaties en ontwerp kunnen
zonder voorafgaande kennisgeving worden gewijzigd.
Capaciteit
| Maximaal werkgebied [m2] |
75.000 m2 |
75.000 m2 |
45.000 m2 |
| Aanbevolen werkgebied [m2]
|
55.000 m2 |
55.000 m2 |
35.000 m2 |
| Maaibreedte [mm]
|
1033 mm(40,7 inch) |
1033 mm (40,7 inch) |
633 mm (24,9 inch) |
| Werksnelheid [kph] |
3,6 km/h
|
3,6 km/h
|
2,8 km/h
|
| Maximale helling [%] |
45% (24°)
|
30% (17°)
|
35% (19,5°)
|
Maaien
| Aantal maaikoppen |
5
|
3
|
| Aantal maaimessen |
15
|
9
|
| Minimale maaihoogte (standaard
schijf of lage maaischijf) |
20 mm / 15 mm(0,8/0,6 inch) |
20 mm / 15 mm (0,8/0,6 inch) |
| Maximale maaihoogte (standaard
schijf of lage maaischijf) |
100 mm of 90 mm(3,9/3,5 inch) |
100 mm / 90 mm (3,9/3,5 inch) |
| Afstelling van maaikoppen |
Elektronisch
|
Elektronisch
|
| Maximaal geluidsniveau (gemeten
op 5 m) |
52 dB(A)
|
52 dB(A)
|
Accu
| Type
|
LIFePo4
|
LIFePo4
|
| Nominale spanning [V] |
25,6 V
|
25,6 V
|
| Nominale capaciteit [Ah] |
19,0 Ah
|
19,0 Ah
|
| Energie [Wh]
|
486,4 Wh
|
486,4 Wh
|
| Bereik van bedrijfstemperatuur |
-5°C tot +60°C |
-5°C tot +60°C |
| Gemiddelde maaitijd [min] |
110
|
280
|
| Gemiddelde tijd tot de machine
volledig opgeladen is [min] |
90
|
90
|
Gewicht en afmetingen
| Gewicht [kg]
|
71 kg156,5 lb
|
52 kg (114,6 lb)
|
| Lengte [mm]
|
1110 mm(43,7 inch) |
1.002 mm (39,4 inch) |
| Breedte [mm]
|
1278 mm(50,3 inches) |
1.044 mm (41,1 inch) |
| Hoogte [mm]
|
515 mm(20,2 inches) |
466 mm (18,3 inch) |
Software en monitoring
| Pincode voor beveiliging |
Ja
|
Ja
|
| Gps-locatie
|
RTK
|
RTK
|
| Robotbeheer via server en app. |
Standaard
|
Standaard
|
Intelligentie
| Sonardetectie van obstakels |
Meerdere
|
Meerdere
|
| Terugkeren naar station via gps |
Ja
|
Ja
|
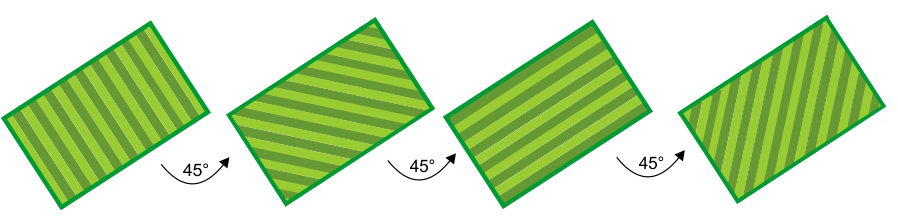
| Type maaien
|
Met patroon
|
Met patroon
|
| Meervoudige startzone |
Ja
|
Ja
|
| Meerdere velden (optioneel) |
Ja
|
Ja
|
| Meerdere robots/station |
Nee
|
Nee
|
| Sonars voor de detectie van obstakels |
5
|
5
|
| Resistente bumper voor botsing |
1
|
1
|
| Hefsensoren vooraan |
2
|
2
|
| Hefsensoren achteraan |
2
|
2
|
| Botsingssensoren achteraan |
2
|
2
|
| Kantel- en omrolsensor |
1
|
1
|
| Maaikopdeflectoren |
2 (1 op elke buitenste maaikop) |
Geen
|
Onderhoud
Overzicht onderhoud
- Onderhoud verwijst naar een stel
taken die regelmatig moeten worden uitgevoerd tijdens het maaiseizoen.
- Het onderhoudsinterval hangt tot
op zekere hoogte af van de belasting van uw robot, maar we bevelen
aan om deze minstens een keer per jaar
door een erkende technicus te laten onderhouden.
- Probeer tijdens het onderhoud
van uw maaier voor optimale prestaties geen wijzigingen aan uw robot
aan te brengen. U loopt het risico de werking
te verstoren, een ongeluk te veroorzaken en onderdelen te beschadigen.
Opmerking: Als u ongewoon gedrag of schade
opmerkt, bel dan een technicus.
- Wanneer u deze onderhoudsprocedures
uitvoert, moeten de volgende veiligheidsvoorschriften in acht worden
genomen:
- Stop de machine: schakel altijd
de stroom uit en wacht tot alle bewegende onderdelen tot stilstand
zijn gekomen voordat u de machine
hanteert.
- Bedien de uitschakelinrichting
voordat u het volgende doet:
- Voordat u aan de machine werkt
of deze optilt.
- Voordat u een verstopping verwijdert.
- Voordat u de machine gaat controleren,
schoonmaken of andere werkzaamheden gaat uitvoeren.
- Nadat u een vreemd voorwerp hebt
geraakt om de machine op schade te controleren.
- Als de maaimachine abnormaal begint
te trillen.
- Draai alle moeren, bouten en schroeven
regelmatig strak aan, zodat de machine steeds veilig te gebruiken
is.
- Gebruik handschoenen: bij het
hanteren van de machine moeten beschermende handschoenen worden gedragen.
- Gebruik altijd OEM-onderdelen
(Original Equipment Manufacturer). Naast het risico op ongelukken,
zal het gebruik van niet-OEM-onderdelen
resulteren in het vervallen van de garantie voor eventuele
schade.
Aanbevolen onderhoudsschema
Opmerking: Deze procedures dienen met de
aanbevolen frequentie worden uitgevoerd door de regelmatige gebruiker
van de robot.
Opmerking: Tijdens het maaiseizoen moet u
regelmatig controleren of alle schroeven, moeren en bouten goed vastzitten.
Draai alle schroeven, moeren en bouten die
loszitten aan en neem contact op met een erkende Toro verdeler als
er schade of aanwijzingen voor een probleem
zijn.
| Voor elk gebruik of dagelijks |
|
| Om de 40 bedrijfsuren |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| Om de 6 maanden |
|
|
|
| Jaarlijks of voorafgaand aan
stalling |
|
| |
Onderhoud van de maai-eenheid
De maai-eenheid controleren
-
Controleer
de maaimessen, mesbouten en de maaischijf elke week om ervoor te zorgen
dat de machine goed blijft maaien.
De maaimessen vervangen
De staat van de maaimessen is
essentieel voor een bevredigend maairesultaat. De levensduur van de
messen hangt van een aantal factoren af. Onderdelen
voor de maaischijf moeten worden vervangen als ze beschadigd zijn.
 |
Waarschuwing |
|
De maaimessen zijn scherp; de
maaimessen aanraken kan ernstig of dodelijk letsel veroorzaken.
Wees
voorzichtig als u de messen vervangt of schoonmaakt.
-
Draai de
schijf zodat de schroefkop waarmee het mes vastzit zichtbaar is.
-
Verwijder
het mes door de schroef te verwijderen.
-
Monteer het
nieuwe mes en draai de schroef vast.
Opmerking: Na elke ingreep aan de maaikoppen
moet u elke maaikop afzonderlijk draaien en controleren of het draaien
van één maaikop niet het
draaien van de andere maaikoppen veroorzaakt.
Overzicht van het vervangen van
messen
De frequentie
waarmee de messen vervangen moeten worden, hangt af van het type robot,
het gebruik ervan en de grond waarop hij werkt.
Aangezien de staat van de messen essentieel is voor een goed maairesultaat,
raden wij u aan om dit onderdeel van uw robot
elke week na installatie en aan het begin van elke nieuw maaiseizoen
te controleren.
Dankzij de pantograaf kan het
mes de golvingen van de grond volgen. Als de pantograaf niet goed
werkt, kunnen de messen bot worden of breken.
De pantograaf moet regelmatig worden gecontroleerd en gereinigd.
Raadpleeg
de volgende lijst met manieren waarop u de levensduur van uw maaimessen
kunt verlengen.
- Zorg dat het terrein vlak is.
Als het terrein erg hobbelig of hellend is, kan het zijn dat de maaikop
de contouren van het terrein niet kan
volgen en dat de maaimessen de grond raken. Probeer het terrein te
egaliseren en indien nodig zeer oneffen
stukken van het maaigebied te verwijderen.
Opmerking: Er kunnen voren ontstaan in de
buurt van het laadstation. We raden daarom aan om de grond in de buurt
van het laadstation te egaliseren
of kunstgras te leggen.
- Verwijder molshopen. Wanneer de
robot een molshoop raakt, vertragen de messen of kunnen ze stoppen.
Zodra de molshoop voorbij is, neemt
het maaimes weer de normale snelheid aan. De weerstand van de aarde
en de veranderingen in snelheid kunnen de schroeven
losmaken (of het schroefgat beschadigen).
- Vermijd kale plekken. De aanwezigheid
van kale plekken binnen een graszone zorgt ervoor dat de rotatiesnelheid
verandert. Als deze verandering in snelheid
te vaak optreedt, kan dit de spil en het schroefgat beschadigen. Om
dit probleem te voorkomen, kunt u de
maaihoogte verhogen zodat de robot minder gras maait en de snelheidsverschillen
kleiner worden. Als alternatief kunnen
de kale plekken opnieuw ingezaaid worden.
- Vermijd contact met nylon grondmarkeringen.
Deze kunnen botheid veroorzaken. We raden aan om deze onder uw maaihoogte
te laten zakken.
- Vermijd lage vaste obstakels in
het gras. Deze omvatten sprinklers, stenen en wortels. Stenen andere
verplaatsbare voorwerpen moeten worden
verwijderd. Om permanente vaste voorwerpen zoals sprinklers te vermijden,
stelt u de maaihoogte hoger in dan het
obstakel, of past u het maaigebied aan om ze te vermijden.
Opmerking: Verwijderbare doelen zijn een
ander voorbeeld van een vast obstakel dat niet door de robot kan worden
gedetecteerd. Zorg ervoor dat deze
verwijderd zijn voordat u gaat maaien.
- Verwijder hoog onkruid in de buurt
van de perimeterdraad. Taaie, hoge planten kunnen het mes bot maken
of beschadigen. Het is daarom beter
om de gebieden rond uw perimeterdraad vrij te maken.
Reinigen
De machine schoonmaken
Tijdens periodes
van nat weer moet u ervoor zorgen dat er zich geen modder of gras
ophoopt op de bewegende onderdelen, namelijk
de wielen en de maaikoppen. Deze moeten dagelijkse worden gecontroleerd
en schoongemaakt.
-
Druk op de
rode knop om de robot te stoppen.
-
Draai de
machine op zijn achterkant.
-
Zet de machine
uit.
-
Verwijder
ophopingen van gras en vuil met een blazer, perslucht en/of een staalborstel.
-
Wrijf de
behuizing schoon met een zachte, vochtige doek of een spons.
-
Als de behuizing
erg vuil is, gebruik dan een zeepoplossing.
Gebruik
nooit oplosmiddelen.
De laadcontacten schoonmaken
-
Wrijf de
oppervlakken van de laadcontacten met schuurpapier (korrel 280) schoon.
De bumper schoonmaken
-
Controleer
of het materiaal van de bumper intact is. Als er sneden of scheuren
zijn, moet u contact opnemen met een erkende
Toro verdeler.
-
Reinig de
bumper met een vochtige doek.
U
mag geen water gebruiken.
Sensoren van de sonar reinigen
De sensoren van de sonar moeten
schoon gehouden worden om goed te kunnen werken. Alle sensoren moeten
goed werken. Als een van de sensoren niet
goed werkt, gaat er een alarm af.
-
Verwijder
modder, gras of vuil en veeg af met een vochtige doek.
U
mag geen water gebruiken.
De voorwielen schoonmaken
-
Verwijder
modder en gras met een staalborstel of een doek..
-
Controleer
of de wielen gemakkelijk draaien en of er niet te veel speling is.
Als er te veel speling is, moet u de wielen
vervangen.
De as van het voorwiel schoonmaken
-
Maak de as
van het voorwiel schoon met een borstel en/of een doek.
-
Controleer
de as visueel. Als er een probleem is, moet u de as vervangen.
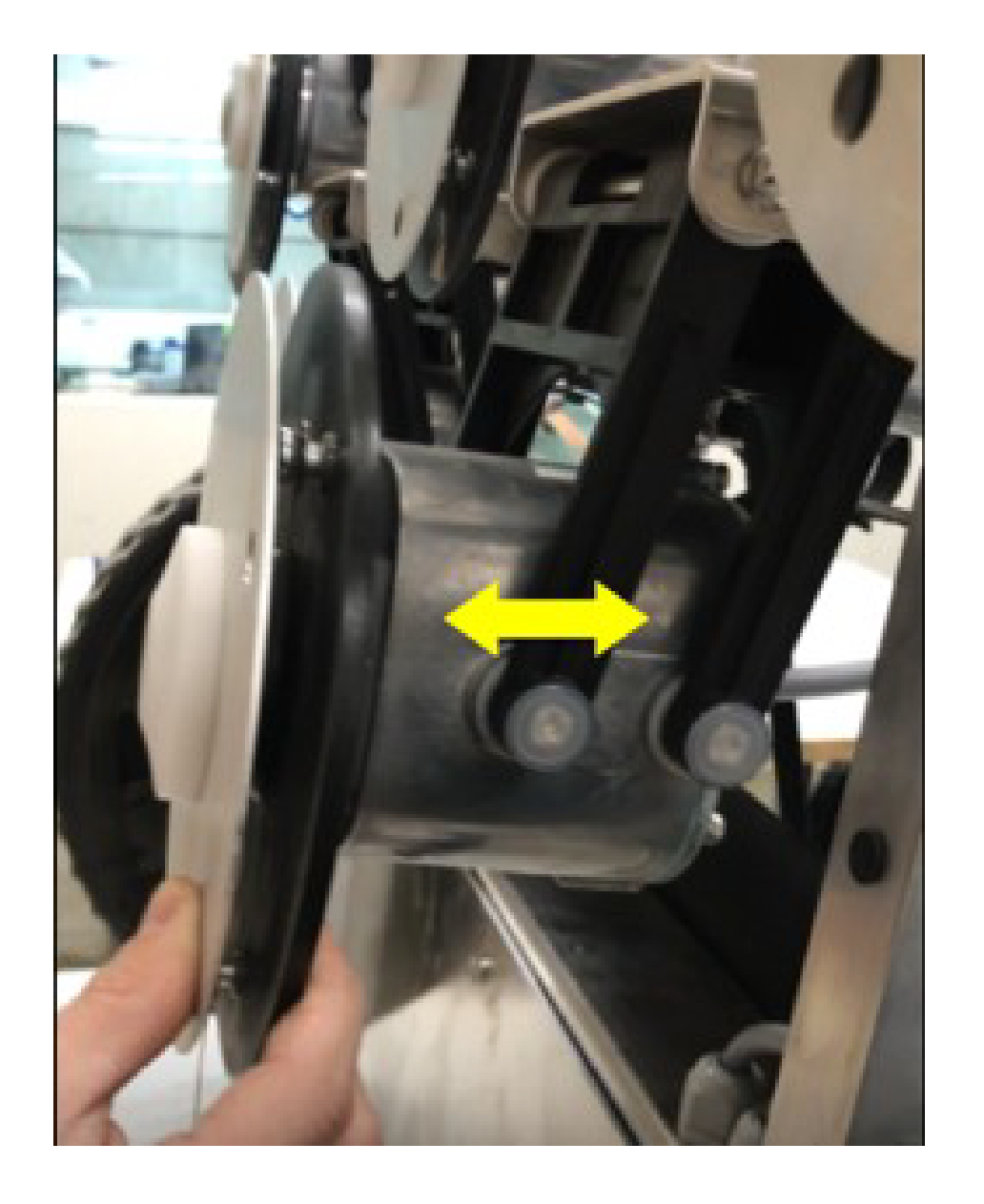
De maaikop schoonmaken
-
Maak de maaikop
schoon met een borstel. Als er perslucht beschikbaar is, krijgt dit
de voorkeur.
-
Controleer
of de hele maaikop soepel heen en weer beweegt, zoals de pijl op de
onderstaande afbeelding laat zien.
De maaischijf schoonmaken
Deze procedure moet wekelijks
worden uitgevoerd. Dit is belangrijk als de maaihoogte is ingesteld
op 25 mm of minder. Als dit het geval
is, is de slijtage van de antifrictieschijf groter en moet deze minstens
om de 2 maanden vervangen worden.
-
Maak de maaischijf
schoon met een borstel. Als er perslucht beschikbaar is, krijgt dit
de voorkeur.
-
Controleer
of de maaischijf soepel draait. Als er een probleem is, moet u de
maaischijven vervangen.
De achterwielen schoonmaken
-
Verwijder
modder en gras met een staalborstel.
Onderhoud elektrisch systeem
De bedrading controleren
-
Controleer
de bedrading onder de robot visueel. Neem contact op met een erkende
Toro verdeler als u problemen vaststelt.
Onderhoud van de accu
De automatische (geprogrammeerde)
werking van de robot optimaliseert de levensduur van de accu. Het
is raadzaam om de robot zijn werkcycli te
laten beheren. Als deze werkcycli ongewoon kort lijken, neem dan contact
op met een erkende Toro verdeler om de conditie
van de accu te controleren.
Opmerking: Het is mogelijk om deze cycli
te controleren via het portaal.
Verklarende woordenlijst
Grensmodus
Wanneer de robot het gras
aan de rand van het veld maait. Dit gebeurt een aantal keer per week.
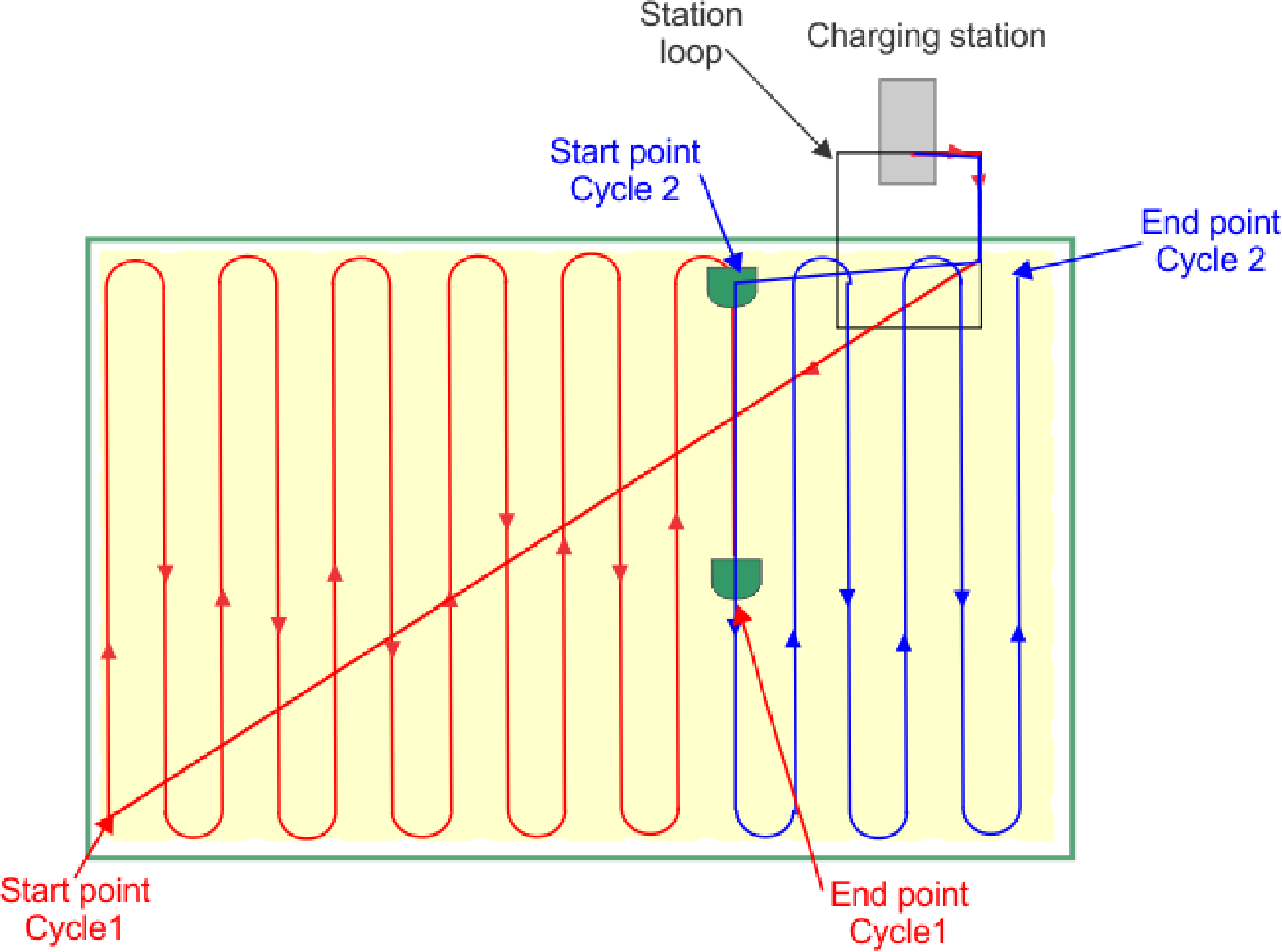
Cyclus
Een cyclus is een werksessie
van de robot. Hij begint wanneer de robot het station verlaat en eindigt
wanneer hij terugkeert naar het station of wanneer
er een probleem is dat de werkcyclus onderbreekt.
Entiteit
Een verzameling robots
en gebruikers die binnen een site werken. Informatie over robots in
een entiteit kan worden bekeken op het webportaal.
Gps-navigatiezone
Dit is een
RTK gps-zone die wordt gedefinieerd door het grensontdekkingsproces.
Het omvat het hele werkgebied. Subzones kunnen vervolgens
worden gecreëerd door deze zone te kopiëren en te bewerken
om de efficiëntie van de robot te optimaliseren.
Gps-punt
Een specifiek punt binnen
een perceel dat de robot gebruikt om terug te keren naar een station
of om een station te verlaten. Het punt wordt gedefinieerd
door de breedte- en de lengtegraad. De robot neemt een directe route
naar dit punt en volgt dan de trackgrens en de lusdraad
om terug te keren naar het station.
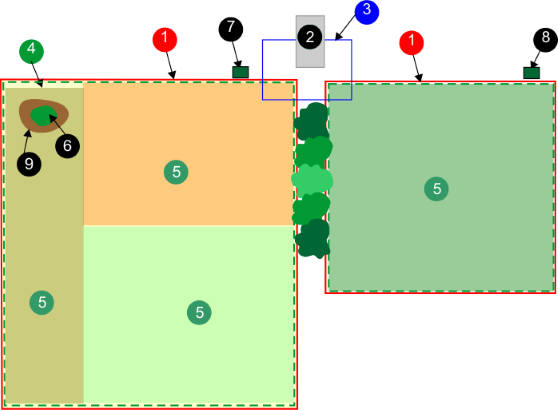
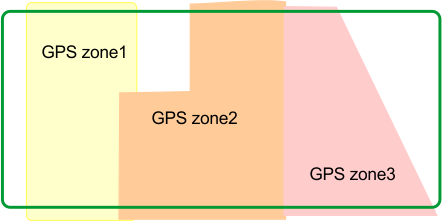
Gps-zone
Een gps-zone wordt gedefinieerd
door een stel gps-coördinaten. Hiermee kan een perceel dat voorzien
is van draden worden onderverdeeld zonder dat er
extra draden en kanalen nodig zijn.
Gps-zones in een perceel dat voorzien
is van draden
G520046
Dit biedt meer flexibiliteit bij
het definiëren van werkgebieden, omdat gepland kan worden dat
de robot met optimale efficiëntie over de zones
werkt.
Inactief
Een robot gaat in de inactieve
stand als de huidige opdracht is beëindigd met de stopknop. Standaard
schakelt de robot na 15 minuten over naar de slaapstand.
Eiland
Een lus in de perimeterdraad
die speciaal is geïnstalleerd om te voorkomen dat robot erin
werkt. De perimeterdraad wordt rond het obstakel
heen gelegd en de naderings- en retourdraad worden naast elkaar gelegd.
Kaart
Kaart van de robotroutes
op het portaal.
In kaart brengen
De informatie
die de robot opbouwt met behulp van gps-gegevens.
NoGo-zone
Door gps gedefinieerde
NoGo-zones zijn door gps-coördinaten gedefinieerde gebieden op
het veld waar de robot nooit mag komen tijdens een
van autonome bedrijfstoestanden. Door gps gedefinieerde NoGo-zones
worden gebruikt om zones uit te sluiten van het
werkgebied van de robot die niet gedetecteerd kunnen worden tijdens
de grensontdekking. Het gebruik van door gps gedefinieerde
NoGo-zones stelt de robot in staat om vooraf het meest
efficiënte maaipatroon te berekenen. Door gps gedefinieerde NoGo-zones
worden gebruikt om obstakels uit te sluiten, meestal
gebeurt dit door eilanden of pseudo-eilanden.
Obstakel
Een object in het veld
dat de robot moet vermijden. Obstakels kunnen permanent zijn (bv.
bomen, meubels) of tijdelijk (bv. dieren). Obstakels
worden door sensoren gedetecteerd. Permanente obstakels kunnen vermeden
worden door lussen te maken in de perimeterdraad
om ‘eilanden’ of ‘pseudo-eilanden’ te vormen.
Perceel
Een gebied dat binnen een
perimeterdraad gemaaid moet worden. Minstens één perceel
is gekoppeld aan één draad. Er kunnen meerdere
percelen worden gedefinieerd.
Percentage
Dit vertegenwoordigt het
deel van de tijd dat de robot aan een bepaald perceel werkt. Als er
maar één perceel is, zal de robot 100%
van zijn tijd daar doorbrengen.
Perimeterdraad
Een draad die
onder het oppervlak van het veld wordt gelegd en het gebied afbakent
waarin de robot werkt. Het gebied dat gedefinieerd
wordt door de perimeterdraad wordt een 'perceel' genoemd.
Pseudo-eiland
De perimeterdraad
wordt om het obstakel heen gelegd, waarbij een specifieke afstand
tussen de naderings- en retourdraad wordt aangehouden.
Robotstatuswaarden
- Uit
De robot is uitgeschakeld.
- Uit na alarm
De robot heeft zichzelf uitgeschakeld
na een alarm.
- Alarm
De robot bevindt zich in een alarmtoestand.
- Blijven
De robot wacht aan een laadstation.
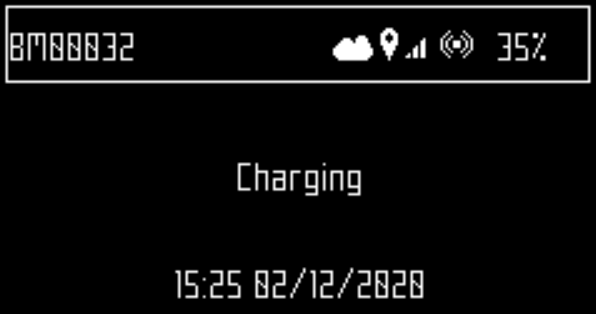
- Laden
De robot is de accu aan het opladen.
- Op weg naar het losstation
De robot gaat naar het ‘drop pit’ station om ballen te lossen. Deze
status start wanneer een robot besluit terug te keren naar het station.
- Op weg naar het laadstation
De robot gaat naar het laadstation.
Deze status start wanneer de robot besluit terug te keren naar het
station.
- Station verlaten
De robot verlaat het station en
begint te werken.
RTK gps-zone
Het werkgebied voor een
robot die maait in een patroon. De RTK gps-zone wordt gedefinieerd
door de robot die een rondje maakt langs de perimeterdraad.
Site
Het hele gebied dat het gebied
omvat waarin de robot werkt
Slaapstand
Een robot schakelt over
naar de slaapstand 15 minuten nadat een alarm is opgetreden dat niet
is gewist. Na 2 dagen in de slaapstand gaat de robot
naar de UIT-stand. Dit gebeurt ook als het laadniveau van de accu
een laag niveau bereikt. In de slaapstand gebruikt
de robot minimale stroom om het risico van de accu te beperken.
De robot kan
uit de slaapstand worden gehaald door:
- het alarm te wissen en de robot
in te schakelen met behulp van de knop op het ledscherm;
- de robot naar het laadstation
te duwen als de accu leeg is;
- op afstand een wake-upcommando
te sturen via het webportaal.
Stationslus
Een stationslus is een
korte draad rond een laadstation die gebruikt wordt om de robot naar
het station te leiden. Wanneer de robot detecteert
dat hij zich in de stationslus bevindt, volgt hij de draad totdat
hij in het station aankomt.
Terrein
Een gebied van gras rondom
het veld dat niet mag worden gemaaid.
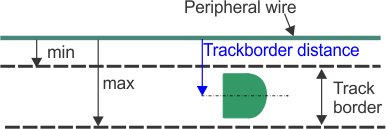
Trackgrens
Een zone gras rond de rand
van het perceel waar de robot werkt. De robot volgt de trackgrens
wanneer hij het station verlaat of ernaar terugkeert,
tenzij hij gps gebruikt. Er is geen trackgrens gespecificeerd voor
een draad die fungeert als een 'lus voor het terugkeren
naar het station'.
De trackgrens ligt naast de perimeterdraad
en wordt gedefinieerd door minimale en maximale afmetingen die zijn
ingesteld als installatieparameters. De grens is
breder dan de robot. Het pad dat de robot aflegt binnen de trackgrens
wordt willekeurig gekozen. Dit zorgt ervoor dat
de robot niet herhaaldelijk over hetzelfde pad beweegt en zo rijsporen
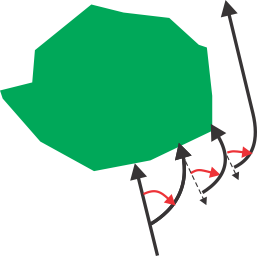
in het veld maakt. Als de robot een obstakel tegenkomt
terwijl hij zich in de trackgrens bevindt, zorgen de sensoren ervoor
dat hij omkeert en vervolgens in een willekeurige
hoek draait om verder te gaan. Dit kan indien nodig een aantal keren
herhaald worden.
Manoeuvreren om een obstakel binnen
de trackgrens te vermijden
G520315