Descripción general del producto
Descripción general del robot cortacésped serie Turf Pro
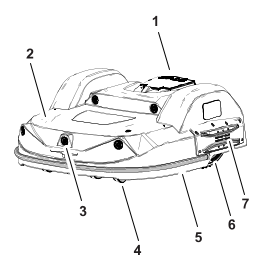
Vista desde arriba
G538206
-
Botón Stop (Parada)
-
Cuerpo
-
Sónares de detección
de obstáculos
-
Ruedas delanteras
-
Parachoques
-
Ruedas traseras
-
Contactos de carga
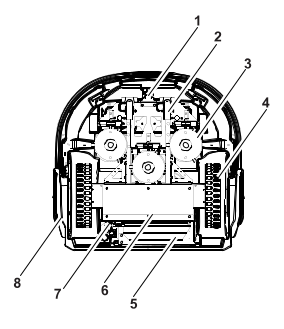
Vista desde abajo(modelo 300)
G538280
-
Bobina
-
Ruedas delanteras
-
Cabezales de corte
-
Ruedas traseras
-
Batería
-
Caja electrónica sellada
(programador inteligente)
-
Interruptor de encendido
-
Contactos de carga
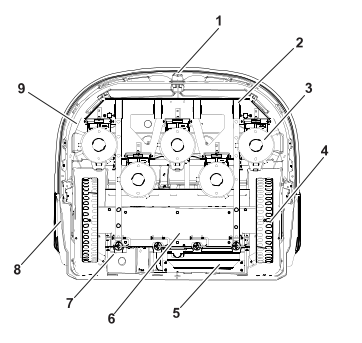
Vista desde abajo(modelo 500)
G529049
-
Bobina
-
Ruedas delanteras
-
Cabezales de corte
-
Ruedas traseras
-
Batería
-
Caja electrónica sellada
(programador inteligente)
-
Interruptor de encendido
-
Contactos de carga
-
Disco de protección
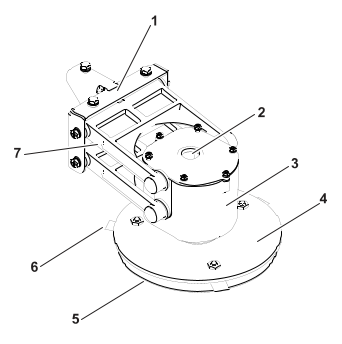
Cabezal de corte
G526500
-
Soporte
-
Entrada de cable
-
Carcasa del motor
-
Disco de soporte de cuchilla
-
Disco antifricción
-
Cuchilla
-
Pantógrafo
Nota: El disco de soporte de cuchilla  , el disco antifricción
, el disco antifricción  y las cuchillas
y las cuchillas  se denominan colectivamente “disco de corte”.
se denominan colectivamente “disco de corte”.
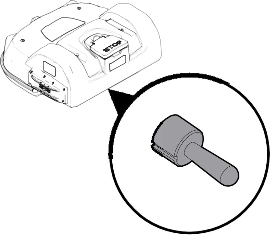
Interruptor de encendido (modelo
300)
|
El interruptor de encendido está
situado debajo de la tapa en la parte izquierda trasera del robot. Mueva el interruptor de encendido
hacia la derecha (a la posición de Encendido) para activar el robot. Mueva el interruptor de encendido
hacia la izquierda (a la posición de Apagado) antes de un periodo de descanso
prolongado o durante el almacenamiento de invierno.
|
Interruptor de encendido (modelo
500)
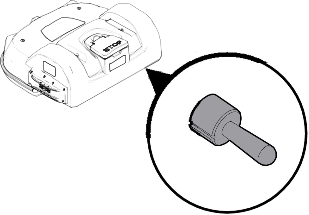 |
El interruptor de encendido está
situado debajo de la tapa en la parte derecha trasera del robot. Mueva el interruptor de encendido
hacia arriba (a la posición de Encendido) para activar el robot. Mueva el interruptor de encendido
hacia abajo (a la posición de Apagado) antes de un periodo de descanso
prolongado o durante el almacenamiento de invierno.
|
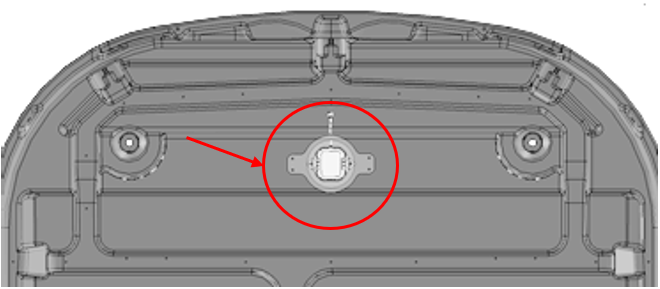
Antena RTK GPS
G519918
Se trata de una antena de GNSS
específica instalada en el centro de la carcasa. Se utiliza para
recibir datos de la posición global del
robot a través de satélites.
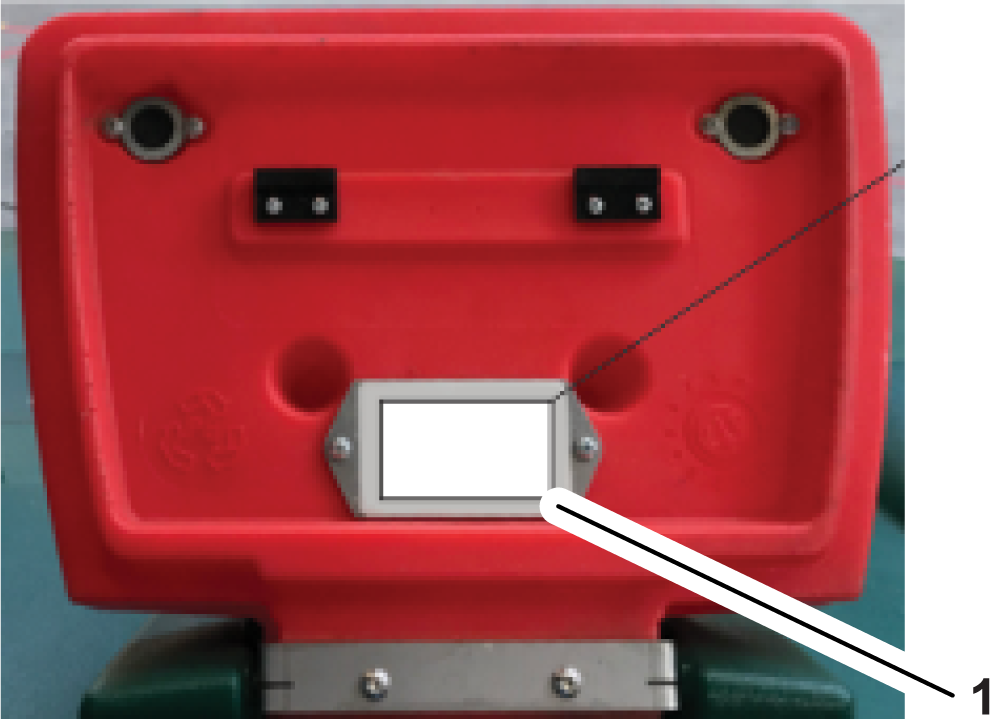
Pegatina con número de serie
La
etiqueta de identificación se puede encontrar en el interior
de la tapa del botón Stop (Parada), tal y como se muestra
a continuación.
G541779
-
Pegatina con número de serie
Descripción general de los
sensores
La máquina
está equipada con un completo conjunto de sensores que garantizan
un funcionamiento seguro. Estos sensores garantizan
que el robot pueda detectar y reaccionar si se encuentra
algún obstáculo en su trayectoria.
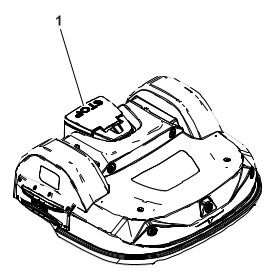
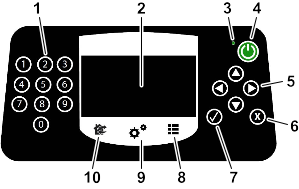
Botón Stop (Parada)
El botón de parada  se encuentra claramente visible
en la parte superior del robot. Al pulsar este botón, el robot
dejará de moverse y de segar. Este
botón también sirve de tapa y, cuando se levanta, ofrece
acceso a la interfaz de usuario del control del robot. Para
reiniciar el robot, es necesario emitir una instrucción
con esta interfaz de control.
se encuentra claramente visible
en la parte superior del robot. Al pulsar este botón, el robot
dejará de moverse y de segar. Este
botón también sirve de tapa y, cuando se levanta, ofrece
acceso a la interfaz de usuario del control del robot. Para
reiniciar el robot, es necesario emitir una instrucción
con esta interfaz de control.
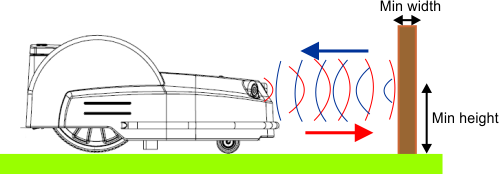
Sónares de detección de obstáculos
El robot está equipado con
un conjunto de sensores sonar para detectar obstáculos. El robot
reducirá la velocidad si los detectores
de sonar detectan un obstáculo.
Detección de obstáculos
mediante sensores sonar
G525070
Si el robot se desplaza
siempre a baja velocidad, aunque no haya obstáculos a la vista,
indica un problema con los sensores. En
este caso, debe ponerse en contacto con el equipo del servicio técnico
para que le ayuden a analizar el problema.
Parachoques
El parachoques es un sensor de
presión que detecta cuando el robot toca un obstáculo. Cuando
el parachoques toca el obstáculo,
el robot se moverá hacia atrás y, a continuación, girará
en ángulo hasta que pueda evitar el obstáculo.
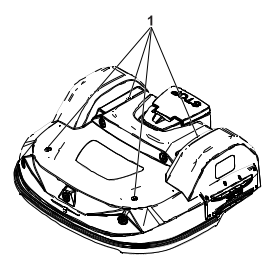
Sensores de elevación y desplazamiento del cuerpo
Ubicación de las conexiones
de los sensores de elevación
G538312
-
Conexiones de los sensores de
elevación
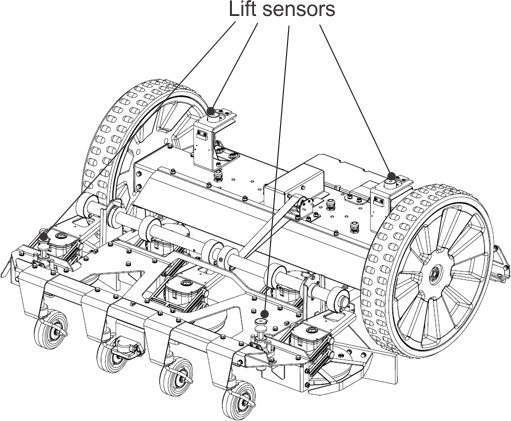
Sensores de elevación (se
muestra la serie 500)
G525072
Los sensores de elevación
se conectan al cuerpo del robot en 4 puntos. Si el robot toca un objeto
bajo que empuja el cuerpo hacia arriba,
o bien si alguien intenta elevar el cuerpo, los sensores de elevación
reaccionarán. El robot dejará de segar
y se moverá hacia atrás. Si con este movimiento
se libera el obstáculo del cuerpo, el robot realizará una
maniobra para evitar el objeto y seguir
segando. De lo contrario, el robot registrará una alarma tras
10 segundos y se mantendrá en modo seguro
(detenido) hasta que se retire el obstáculo.
Bobina
La
bobina de inducción detecta la intensidad del campo magnético
que se genera dentro del cable periférico. La intensidad
máxima se encuentra en el cable que hace
que el robot se detenga, gire y siga segando en una nueva dirección.
Sensor de inclinación
El sensor de inclinación
detecta el ángulo de la pendiente en la que está trabajando
el robot. Se emite una alarma y el robot
deja de segar si se supera el ángulo.
Sensor de vuelco
El sensor de vuelco detecta si
el robot ha volcado boca abajo o si alguien está intentando arrancar
el motor cuando el robot está boca
abajo.
Sensor de temperatura
El sensor de temperatura mide
la temperatura ambiente y evitará que el robot funcione si la
temperatura es demasiado baja. La temperatura
mínima a la que puede funcionar el robot se ajusta como un parámetro
de funcionamiento.
Receptor RTK GPS
Este sensor recopila datos de
los satélites para determinar la ubicación global precisa
del robot.
Aperos/accesorios
Está disponible una selección
de aperos y accesorios homologados por Toro que pueden utilizarse con la
máquina a fin de potenciar y aumentar sus prestaciones. Póngase
en contacto con su Servicio Técnico Autorizado
o con su distribuidor autorizado Toro, o visite www.Toro.com para obtener una lista
de todos los aperos y accesorios homologados.
Para asegurar un rendimiento
óptimo y mantener la certificación de seguridad de la máquina,
utilice solamente piezas y accesorios genuinos Toro.
Descripción general de la estación de carga
Nota: Se muestra el Modelo 30914EU. El aspecto varía ligeramente en
función del modelo. Consulte el manual de carga para obtener
más información.
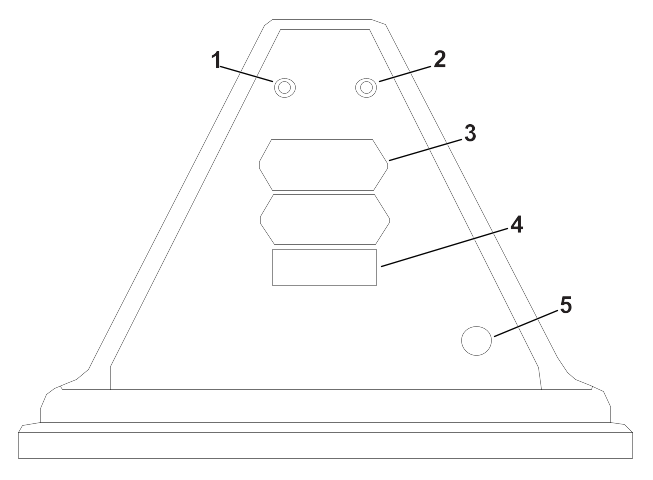
Componentes de la estación de carga
G520730
- Brazos
de carga
- Base
- Sensor
de ocupación
Vista trasera de la estación
de carga
G537669
- Indicador
LED Za
- Indicador
LED ZL
- Etiqueta
de identificación
- Pegatina
- Entrada
del cable de alimentación
Vista desde abajo de la estación
de carga
G538193
- Entrada
del cable perimetral
Indicadores LED
Los indicadores LED muestran el
estado actual de cada cable. Consulte la tabla siguiente.
| Verde - intermitente |
El cable funciona normalmente. |
| Rojo - intermitente |
No se detecta ningún cable
perimetral. Puede que se haya cortado el cable o que sea demasiado
largo. |
| Rojo - fijo
|
Indica un problema. Puede que
el cable sea demasiado corto (menos de 200 m o 656 pies),
o bien que haya un problema con el
sistema electrónico.
|
Los LED llevan las siguientes
etiquetas:
- ZL: Cable de la zona de circuito
de estación
- Za: Cable de la zona de trabajo
A
- Zb: Cable de la zona de trabajo
B
Nota: Si está utilizando una estación de carga con varios circuitos
y no está utilizando uno de los circuitos, el LED parpadeará
en rojo. Para hacer que el LED deje de
parpadear en rojo, coloque el canal en la placa en 9.
Especificaciones
Nota: Las especificaciones y diseños están sujetos a modificación
sin previo aviso.
Capacidad
| Área máxima de trabajo
[m2]
|
75 000 m2 (18,5 acres) |
75 000 m2 (18,5 acres) |
45 000 m2 (11,1 acres) |
| Área de trabajo recomendada
[m2]
|
55 000 m2 (13,6 acres) |
55 000 m2 (13,6 acres) |
35 000 m2 (8,6 acres) |
| Anchura de siega [mm] |
1033 mm(40,7")
|
1033 mm (40,7") |
633 mm (24,9") |
| Velocidad de trabajo [km/h] |
3,6 km/h (2,2 mph) |
3,6 km/h (2,2 mph) |
2,8 km/h (1,7 mph) |
| Pendiente máxima [%] |
45 % (24°) |
30 % (17°) |
35 % (19,5°) |
Corte
| Número de cabezales de corte |
5
|
3
|
| Número de cuchillas de corte |
15
|
9
|
| Altura de corte mínima (disco
estándar/disco de baja altura)
|
20 mm/15 mm(0,8/0,6") |
20 mm / 15 mm (0,8/0,6") |
| Altura de corte máxima (disco
estándar/disco de baja altura)
|
100 mm/90 mm(3,9/3,5") |
100 mm / 90 mm (3,9/3,5") |
| Ajuste de cabezales de corte |
Electrónico
|
Electrónico
|
| Nivel máximo de ruido (medido
a 5 m) |
52 db(A)
|
52 db(A)
|
Batería
| Tipo
|
LIFePo4
|
LIFePo4
|
| Tensión nominal [V] |
25,6 V
|
25,6 V
|
| Capacidad nominal [Ah] |
19,0 Ah
|
19,0 Ah
|
| Energía [Wh] |
486,4 Wh
|
486,4 Wh
|
| Rango de temperatura de funcionamiento |
-5 °C a +60 °C |
-5 °C a +60 °C |
| Tiempo de siega medio [min] |
110
|
280
|
| Tiempo medio hasta la carga completa
[min] |
90
|
90
|
Peso y dimensiones
| Peso [kg]
|
71 kg(156,5 lb) |
52 kg (114,6 lb) |
| Longitud [mm]
|
1110 mm(43,7")
|
1002 mm (39,4") |
| Anchura [mm]
|
1278 mm(50,3")
|
1044 mm (41,1") |
| Altura [mm]
|
515 mm(20,2")
|
466 mm (18,3") |
Software y supervisión
| Código PIN de seguridad |
Sí
|
Sí
|
| Localización GPS |
RTK
|
RTK
|
| Gestión del robot a través
de servidor y aplicación
|
Estándar
|
Estándar
|
Inteligencia
| Detección de obstáculos
mediante sonar |
Múltiple
|
Múltiple
|
| Volver a la estación mediante
GPS |
Sí
|
Sí
|
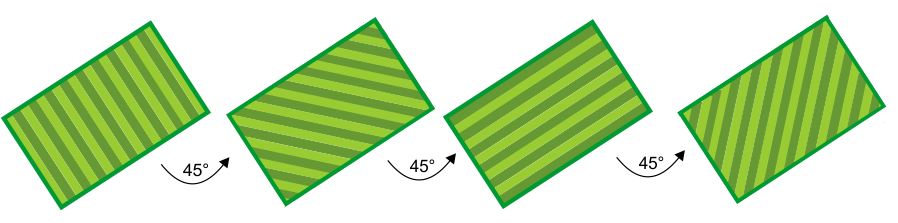
| Tipo de siega
|
En patrones
|
En patrones
|
| Zona de arranque múltiple |
Sí
|
Sí
|
| Varios campos (opcional) |
Sí
|
Sí
|
| Varios robots/estaciones |
No
|
No
|
| Sonar para detección de obstáculos |
5
|
5
|
| Parachoques resistente a colisiones |
1
|
1
|
| Sensores de elevación delantera |
2
|
2
|
| Sensores de elevación trasera |
2
|
2
|
| Sensores de colisión trasera |
2
|
2
|
| Sensor de vuelco/inclinación |
1
|
1
|
| Deflectores de cabezal de corte |
2 (1 en cada cabezal de corte
exterior) |
Ninguno
|
Mantenimiento
Descripción general del mantenimiento
- El mantenimiento se refiere a
un conjunto de tareas que deben realizarse habitualmente a lo largo
de la temporada de siega.
- El intervalo de mantenimiento
depende en cierta medida de la carga operativa del robot, pero se
recomienda que lo revise un técnico
autorizado al menos una vez al año.
- Mientras se realiza el mantenimiento
del robot para obtener un rendimiento óptimo, no intente realizar
ningún cambio en él. Corre el
riesgo de perturbar el funcionamiento, provocar un accidente y dañar
piezas.
Nota: Si observa algún comportamiento extraño o daños, llame
a un técnico.
- Al realizar estos procedimientos
de mantenimiento deben cumplirse las siguientes normas de seguridad:
- Detenga la máquina: desconecte
siempre la alimentación y espere a que se detengan todas las
piezas en movimiento antes de manipular
la máquina.
- Desconecte el dispositivo antes
de realizar lo siguiente:
- Antes de trabajar en la máquina
o de elevarla.
- Antes de eliminar un atasco.
- Antes de comprobar o limpiar la
máquina, o bien trabajar en ella.
- Tras golpear un objeto extraño
e inspeccionar la máquina en busca de daños.
- Si el cortacésped comienza
a vibrar de manera anormal.
- Mantenga apretados todos los tornillos,
pernos y tuercas para asegurar que la máquina esté en perfectas
condiciones de funcionamiento.
- Utilice guantes: deben llevarse
guantes protectores siempre que se manipule la máquina.
- Utilice siempre piezas de OEM
(Original Equipment Manufacturer, fabricante de equipos originales).
Además del riesgo de accidentes,
el uso de cualquier pieza que no sea de OEM supondrá
la anulación de la garantía por cualquier daño resultante.
Calendario recomendado de mantenimiento
Nota: El usuario habitual del robot debe llevar a cabo estos procedimientos
con la frecuencia recomendada.
Nota: A lo largo de la temporada de siega debe comprobar periódicamente
que todos los tornillos, las tuercas y los pernos están
bien apretados. Apriete los que estén sueltos
y, si hay daños o indicios de problemas, póngase en contacto
con un distribuidor Toro autorizado.
| Antes de cada
uso o a diario
|
|
| Cada 40 horas |
|
|
|
|
|
|
|
| |
|
|
|
|
|
|
|
|
| Cada 6 meses |
|
| |
| Cada
año o antes del almacenamiento |
|
| |
Mantenimiento de la unidad de
corte
Inspección de la unidad de
corte
-
Inspeccione
las cuchillas, los pernos de las cuchillas y el conjunto del disco
de corte cada semana para mantener una función
de corte óptima.
Sustitución de las cuchillas
de corte
El estado de las cuchillas es
fundamental para que la operación de siega sea satisfactoria.
La vida útil de las cuchillas depende
de una serie de factores. Deben sustituirse partes del conjunto de
disco de corte cuando estén dañadas.
 |
Advertencia |
|
Las cuchillas están muy afiladas;
cualquier contacto con las cuchillas puede causar lesiones graves
o la muerte.
Tenga cuidado al sustituir o limpiar
las cuchillas.
-
Gire el disco
de modo que quede visible el cabezal del tornillo que sostiene la
cuchilla.
-
Retire la
cuchilla retirando el tornillo.
-
Instale la
cuchilla nueva y apriete el tornillo.
Nota: Tras realizar cualquier intervención en los cabezales de corte,
gire cada uno de ellos de forma independiente y verifique
que al girar uno no giren los demás.
Descripción general de la
sustitución de las cuchillas
La frecuencia con la que se tienen
que sustituir las cuchillas depende del tipo de robot, su uso y el
terreno en el que se utiliza. Puesto que el
estado de las cuchillas es fundamental para que el resultado de la
siega sea satisfactorio, se recomienda que
compruebe estas piezas del robot semanalmente tras la instalación
y al principio de cada nueva temporada de siega.
Con el pantógrafo,
la cuchilla puede seguir las curvas del terreno. Si el pantógrafo
no funciona correctamente, las cuchillas se
pueden desafilar o romper. El pantógrafo debe comprobarse y limpiarse
de forma habitual.
Consulte en la siguiente lista
formas en las que puede prolongar la vida útil de las cuchillas.
- Asegúrese de que el terreno
sea regular. Si el terreno presenta baches o desniveles, puede que
el cabezal de corte no pueda seguir
los contornos del terreno y las cuchillas pueden chocar contra el
suelo. Intente igualar el terreno y, si es necesario,
excluya los tramos muy irregulares de la zona de
siega.
Nota: Pueden aparecer surcos junto a la estación de carga. Por lo
tanto, se recomienda nivelar el terreno junto a la estación o
colocar césped artificial.
- Elimine las toperas. Cuando los
robots chocan contra una topera, las cuchillas se ralentizan o pueden
detenerse. Una vez pasada la topera,
la cuchilla vuelve a una velocidad normal. La resistencia de la tierra
y los cambios de velocidad podrían aflojar
los tornillos (o bien dañar el orificio del tornillo).
- Evite tramos sin hierba. La presencia
de tramos sin hierba dentro de una zona con hierba hará que cambie
la velocidad de rotación. Si este
cambio de velocidad se produce con demasiada frecuencia, puede dañar
el pivote y el orificio del tornillo. Para evitar
este problema, puede aumentar la altura de corte para
que el robot corte menos hierba y disminuyan las diferencias de velocidad.
Como alternativa, se pueden volver a
sembrar las parcelas sin hierba.
- Evite el contacto con marcadores
de suelo de nylon. Pueden desafilar las cuchillas. Se recomienda bajarlos
por debajo de la altura de corte.
- Evite los obstáculos bajos
y sólidos en la hierba. Entre ellos, se pueden incluir aspersores,
piedras y raíces. Las piedras y
otros objetos móviles deben retirarse. Para evitar objetos sólidos
permanentes, como aspersores, ajuste la altura de corte
a un valor superior al obstáculo o adapte
la zona de siega para evitarlos.
Nota: Las porterías desmontables son otro ejemplo de obstáculo
sólido que el robot no puede detectar. Asegúrese de retirarlas
antes de la programación de
siega.
- Elimine la maleza alta cerca del
cable periférico. Las plantas altas y resistentes pueden desafilar
o dañar la cuchilla. Por lo tanto,
es preferible mantener despejadas las zonas alrededor del cable periférico.
Limpieza
Limpieza de la máquina
Durante periodos de lluvia o humedad,
es necesario asegurarse de que no se acumula barro y hierba en las
piezas móviles, es decir, las ruedas
y los cabezales de corte. Estas piezas deben inspeccionarse y limpiarse
a diario.
-
Pulse el
botón rojo para detener el robot.
-
Vuelque la
máquina sobre su costado posterior.
-
Apague la
máquina.
-
Elimine la
hierba o la suciedad que se haya acumulado con un soplador, aire comprimido
y/o un cepillo de alambre.
-
Frote el
cuerpo con un paño o una esponja húmeda y suave.
-
Si el cuerpo
está muy sucio, utilice una solución jabonosa.
No
utilice nunca disolventes.
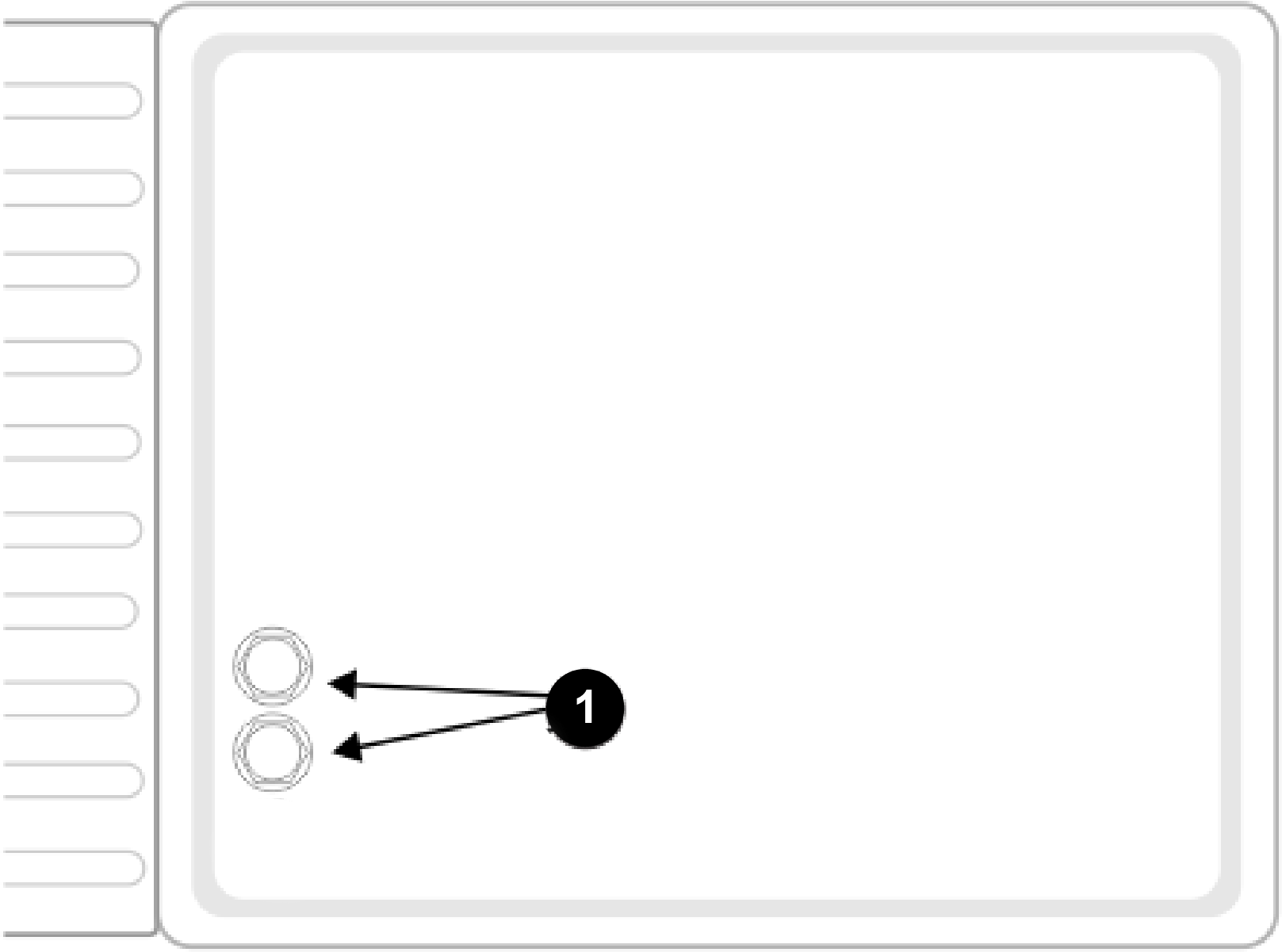
Limpieza de los contactos de carga
-
Frote las
superficies de contacto de carga con papel de lija (grado 280) hasta
que aparezcan limpias.
Limpieza del parachoques
-
Compruebe
que el material del parachoques esté intacto. Si hay presentes
cortes o desgarros, póngase en contacto con un distribuidor
Toro autorizado.
-
Limpie el
parachoques con un paño húmedo.
Limpieza de los sensores por sonar
Para que funcionen correctamente,
los sensores por sonar deben mantenerse limpios. Todos los sensores
deben funcionar correctamente. Si alguno de
los sensores no funciona correctamente, se emitirá una alarma.
-
Retire cualquier
resto de barro, hierba o suciedad y límpielos con un paño
húmedo.
Limpieza de las ruedas delanteras
-
Retire cualquier
resto de barro y hierba con un cepillo de alambre o un paño..
-
Compruebe
que las ruedas giren fácilmente y que no haya mucha holgura.
Si hay demasiada holgura, sustituya las ruedas.
Limpieza del eje de las ruedas
delanteras
-
Limpie el
eje de las ruedas delanteras con un cepillo o un paño.
-
Inspeccione
visualmente el eje. Si hay algún problema, sustituya el eje.
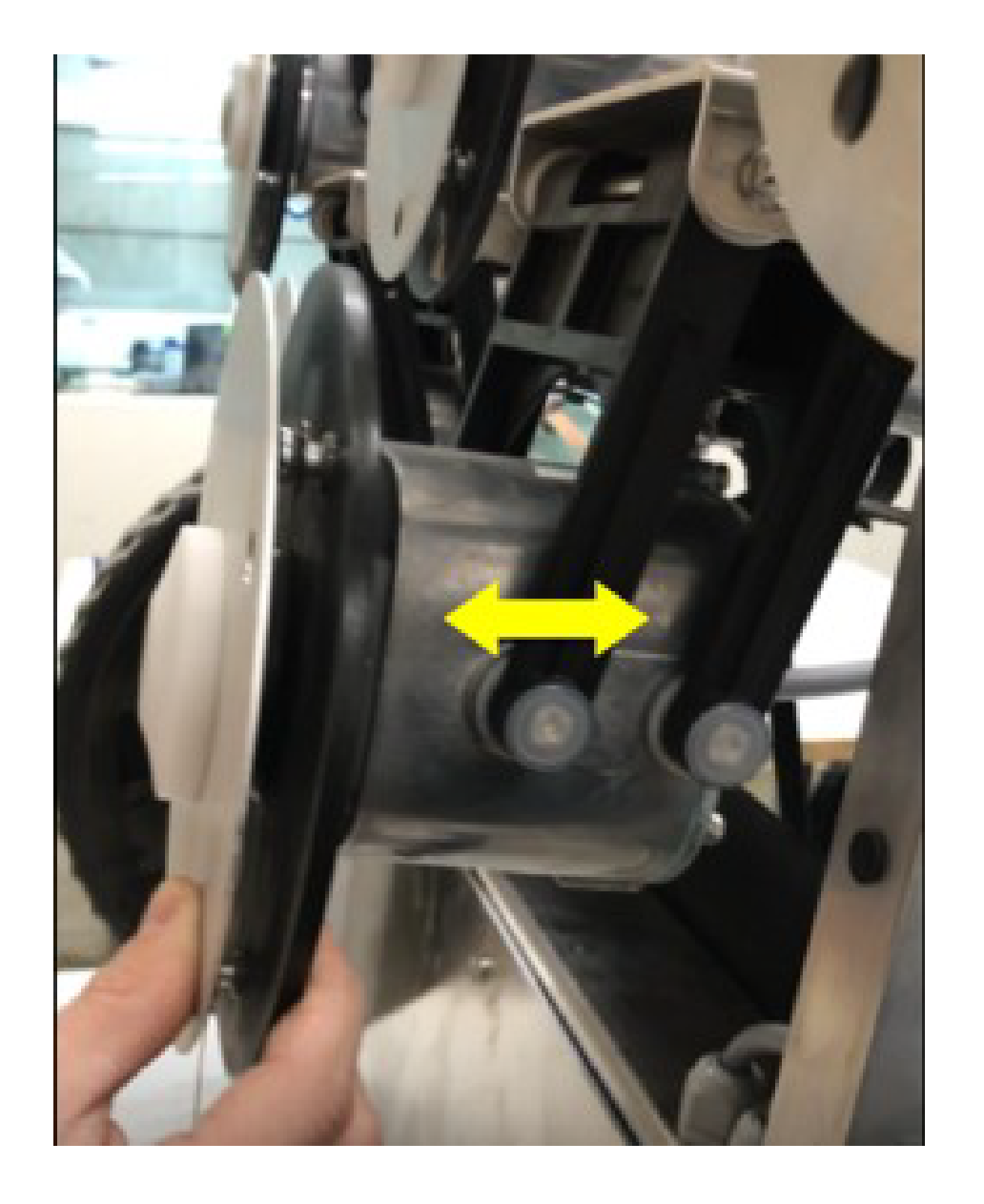
Limpieza del cabezal de corte
-
Limpie el
cabezal de corte con un cepillo. Si dispone de aire comprimido, es
preferible usarlo.
-
Compruebe
que todo el cabezal de corte se mueva sin problemas hacia delante
y hacia atrás, tal y como se muestra con la flecha
en la siguiente figura.
Limpieza del disco de corte
Este procedimiento debe realizarse
semanalmente. Es importante si la altura de corte se ajusta a 25 mm
(0,98") o menos. Si es así, aumenta el
desgaste del disco antifricción y deberá sustituirse al
menos cada 2 meses.
-
Limpie el
disco de corte con un cepillo. Si dispone de aire comprimido, es preferible
usarlo.
-
Compruebe
que el disco de corte gira sin problemas. Si hay algún problema,
sustituya los discos de corte.
Limpieza de las ruedas traseras
-
Retire cualquier
resto de barro y hierba con un cepillo de alambre.
Mantenimiento del sistema eléctrico
Comprobación del cableado
-
Inspeccione
visualmente el cableado bajo el robot. Si se detecta algún problema,
póngase en contacto con un distribuidor Toro
autorizado.
Reparación de la batería
El funcionamiento
automático (programado) del robot optimiza la duración de
la batería. Se recomienda dejar que el robot gestione
sus ciclos de trabajo. Si estos ciclos de trabajo
parecen inusualmente cortos, póngase en contacto con un distribuidor
Toro autorizado para comprobar el estado de
la batería.
Nota: Estos ciclos se pueden supervisar con el portal.
Glosario
Modo de límite
Cuando el robot
corta la hierba en el borde del campo. Esto se realiza varias veces
a la semana.
Ciclo
Un ciclo es una sesión
de trabajo del robot. Comienza cuando el robot sale de la estación
y finaliza cuando vuelve a ella, o bien cuando hay
un problema que detiene el ciclo de trabajo.
Entidad
Un conjunto de robots y
usuarios que funcionan en un lugar. La información sobre los
robots en una entidad se puede visualizar en el
portal web.
Zona de navegación GPS
Se trata de
una zona RTK GPS que se define mediante el proceso de descubrimiento
de límites. Incluye toda el área de trabajo.
A continuación, se pueden crear subzonas copiando y editando
esta zona para optimizar la eficiencia del robot.
Punto GPS
Un punto concreto en una
parcela que el robot utiliza para volver de la estación o salir
de ella. El punto se define mediante su latitud
y longitud. El robot toma una ruta directa hasta este punto y, a continuación,
sigue el borde de pista y el cable de circuito para
volver a la estación.
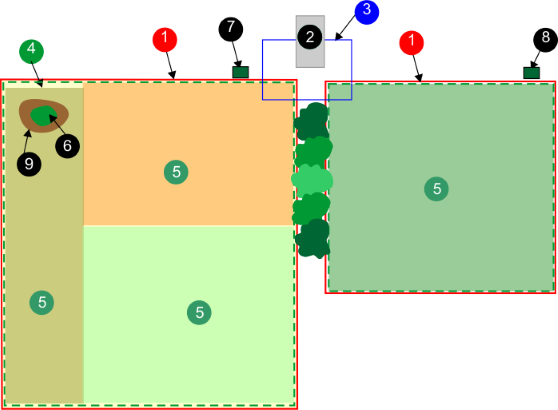
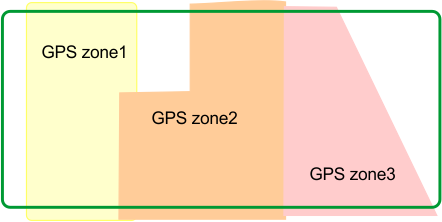
Zona GPS
Una zona GPS se define
mediante un conjunto de coordenadas GPS. Permite subdividir una parcela
cableada sin tener que usar cables y canales adicionales.
Zonas GPS en una parcela cableada
G520046
Aporta mayor flexibilidad a la
hora de definir áreas de trabajo, ya que el robot se puede programar
para que trabaje con una eficiencia óptima
en las zonas.
Ralentí
Un robot pasará al
modo de ralentí si la misión actual se ha finalizado con
el botón de Parada. De forma predeterminada, el
robot pasará al modo de suspensión después de
15 minutos.
Isla
Un circuito en el cable periférico
instalado especialmente para evitar que el robot trabaje dentro del
mismo. El cable periférico se coloca alrededor
del obstáculo y los cables de aproximación y retorno se
sitúan uno junto a otro.
Mapa
Mapa de las rutas de los robots
en el portal.
Mapeado
La información recopilada
por el robot utilizando datos GPS.
Zona vedada
Las zonas vedadas definidas
por GPS son regiones en el campo definidas por coordenadas de GPS
a las que el robot nunca puede acceder durante sus
estados de funcionamiento autónomo. Las zonas vedadas definidas
por GPS se utilizan para excluir zonas del área
de trabajo del robot que no se pueden detectar durante el descubrimiento
de límites. Al utilizar zonas vedadas definidas
por GPS, el robot puede calcular el patrón de siega más
eficiente por adelantado. Las zonas vedadas definidas por GPS se utilizan
para excluir obstáculos, normalmente mediante
islas y pseudoislas.
Obstáculo
Un objeto en
el campo que el robot debe evitar. Los obstáculos pueden ser
permanentes (por ejemplo, árboles, muebles) o transitorios,
(por ejemplo, animales). Los obstáculos se detectan
mediante sensores. Los obstáculos permanentes se pueden evitar
creando circuitos en el cable periférico para
formar “islas” o “pseudoislas”.
Parcela
Un área que se debe
segar dentro de un cable periférico. Al menos una parcela está
asociada a un cable. Se pueden definir varias parcelas.
Porcentaje
Representa la proporción
de tiempo que el robot pasará trabajando en una parcela concreta.
Si solo hay una parcela, el robot pasará la
totalidad del tiempo en ella.
Cable periférico
Un cable colocado
bajo la superficie del campo que define el área en la que funciona
el robot. El área definida por el cable periférico
se denomina “parcela”.
Pseudoisla
El cable periférico
se sitúa alrededor del obstáculo, manteniendo una distancia
concreta entre los cables de aproximación y
de retorno.
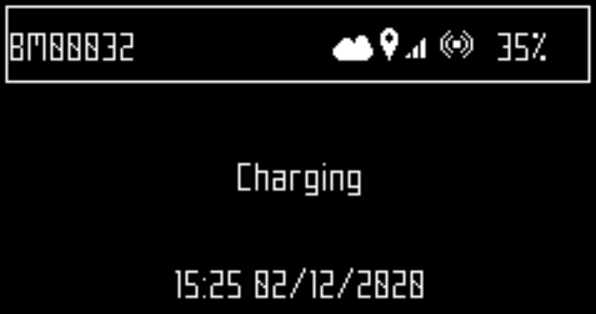
Valores de estado del robot
- Desconectado
El robot se ha desconectado.
- Desconectado tras alarma
El robot se ha desconectado solo
tras una alarma.
- Alarma
El robot está en estado de
alarma.
- Permanencia
El robot está esperando en
una estación de carga.
- Carga
El robot está cargando la
batería.
- Dirigiéndose a la estación
de descarga
El robot se
dirige a la estación de descarga para descargar pelotas. Este
estado comienza cuando un robot decide volver a
la estación.
- Dirigiéndose a la estación
de carga
El robot se
dirige a la estación de carga. Este estado comienza cuando el
robot decide volver a la estación.
- Saliendo de la estación
El robot está saliendo de
la estación y empezando el trabajo.
Zona RTK GPS
El área de trabajo
de un robot que realiza una siega en patrón. La zona RTK GPS
la define el robot al realizar un recorrido por
el cable periférico.
Sitio
Toda el área que incluye
el área en la que funciona el robot.
Suspensión
Un robot pasará
al modo de suspensión 15 minutos después de que se haya
producido una alarma que no se haya borrado. Tras
2 días en el modo de suspensión, el robot pasará
al modo desactivado. Esto también se producirá si el nivel
de carga de la batería llega a un nivel bajo.
En el modo de suspensión, el robot utiliza la energía mínima
para reducir riesgos para la batería.
Se puede desactivar el
modo de suspensión de los siguientes modos:
- borrando la alarma y encendiendo
el robot mediante el botón en la pantalla LED;
- llevando el robot hasta la estación
de carga si se ha agotado la batería;
- enviando un comando de activación
remoto a través del portal web.
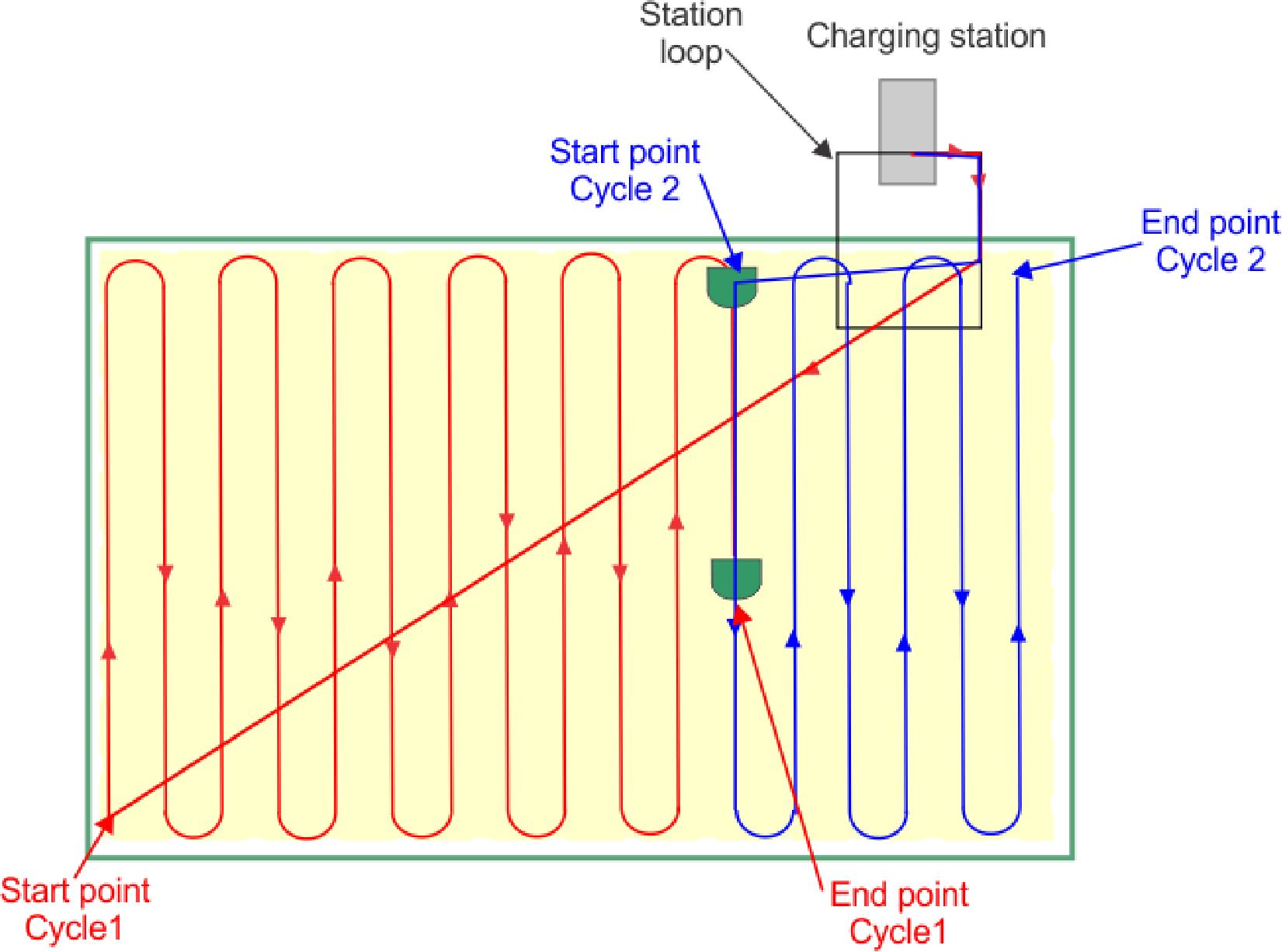
Circuito de estación
Un circuito
de estación es un cable corto alrededor de una estación
de carga que se utiliza para guiar al robot hasta la estación.
Cuando el robot detecta que está en el circuito
de la estación, sigue el cable hasta que llega a la estación.
Terreno
Un área de hierba
alrededor del campo que no debe segarse.
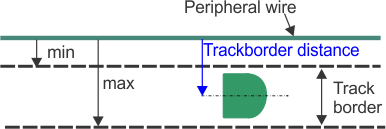
Límite de pista
Una anchura
de hierba alrededor del borde de la parcela en la que funciona el
robot. El robot sigue el límite de pista al
salir de la estación o al volver a ella, a menos que utilice
GPS. No hay ningún límite de pista especificado para un
cable que funciona como “circuito de regreso a la estación”.
El límite de la pista se
encuentra junto al cable periférico y se define mediante dimensiones
mínimas y máximas ajustadas como parámetros
de instalación. Es más ancho que el robot. La ruta que toma
el robot dentro del límite de pista se selecciona
de forma aleatoria. Garantiza que el robot no se desplace repetidamente
a lo largo de la misma ruta y se creen surcos en el
campo. Si el robot se encuentra un obstáculo mientras está
en el límite de pista, los sensores harán que dé la
vuelta y gire en un ángulo aleatorio para continuar.
Esto puede repetirse varias veces si es necesario.
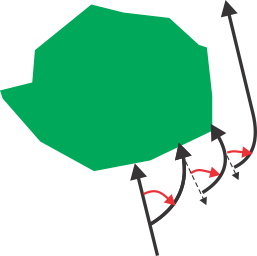
Maniobras para evitar un obstáculo
en el límite de pista
G520315