Laitteen yleiskatsaus
Turf Pro ‑sarjan robottileikkurin yleiskatsaus
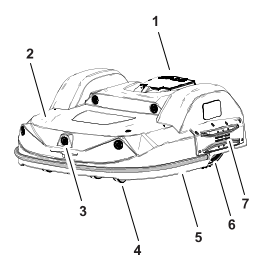
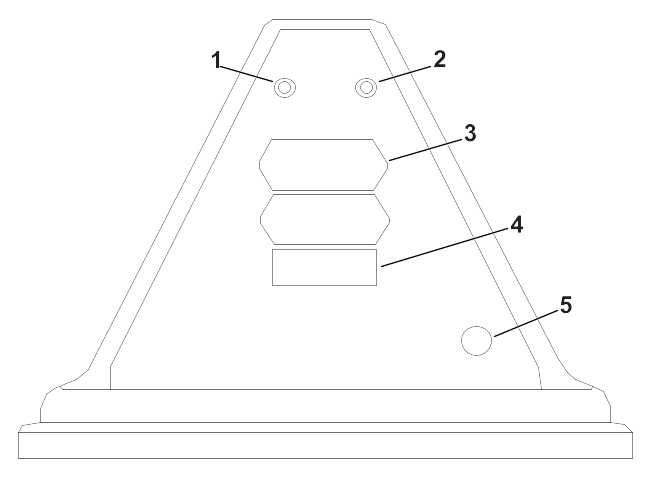
Näkymä yläpuolelta
G538206
-
Stop-painike
-
Runko
-
Esteentunnistuksen äänianturit
-
Etupyörät
-
Puskuri
-
Takapyörät
-
Latauskoskettimet
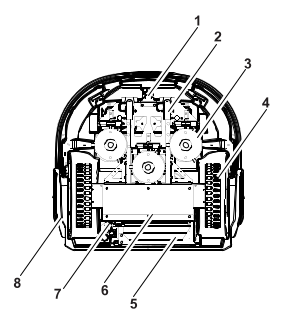
Näkymä alapuolelta (malli
300)
G538280
-
Käämi
-
Etupyörät
-
Leikkuupäät
-
Takapyörät
-
Akku
-
Suljettu sähkörasia
(älyrasia)
-
Virtakytkin
-
Latauskoskettimet
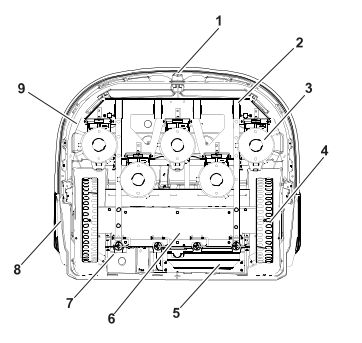
Näkymä alapuolelta (malli
500)
G529049
-
Käämi
-
Etupyörät
-
Leikkuupäät
-
Takapyörät
-
Akku
-
Suljettu sähkörasia
(älyrasia)
-
Virtakytkin
-
Latauskoskettimet
-
Suojalevy
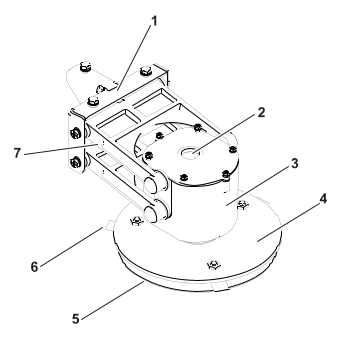
Leikkuupää
G526500
-
Kannatin
-
Johdon sisääntulo
-
Moottorin kotelo
-
Terän tukilevy
-
Kitkanestolevy
-
Leikkuuterä
-
Pantografi
Huomaa: Terän tukilevyä  , kitkanestolevyä
, kitkanestolevyä  ja leikkuuteriä
ja leikkuuteriä  kutsutaan yhdessä ”leikkuukiekoksi”.
kutsutaan yhdessä ”leikkuukiekoksi”. Virtakytkin (malli 300)
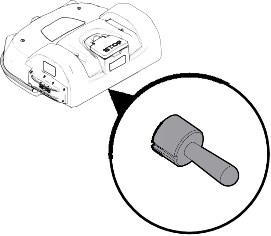
|
Virtakytkin sijaitsee kuoren alla
robotin takaosassa vasemmalla puolella.
Käytä
robottia siirtämällä virtakytkin oikealle (ON-asentoon).
Jos
robotti on pitkään käyttämättä tai talven
ajan varastossa, siirrä virtakytkin vasemmalle (OFF-asentoon).
|
Virtakytkin (malli 500)
 |
Virtakytkin sijaitsee kuoren alla
robotin takaosassa oikealla puolella.
Käytä
robottia siirtämällä virtakytkin ylös (ON-asentoon).
Jos
robotti on pitkään käyttämättä tai talven
ajan varastossa, siirrä virtakytkin alas (OFF-asentoon).
|
RTK GPS ‑antenni
G519918
Tämä on erityinen GNSS-antenni,
joka on asennettu kuoren etuosaan keskelle. Sitä käytetään
vastaanottamaan satelliiteista tietoja robotin
globaalista sijainnista.
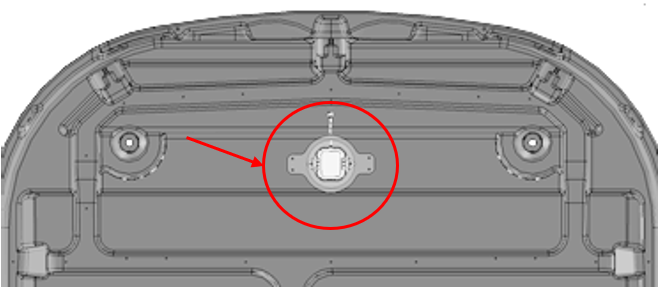
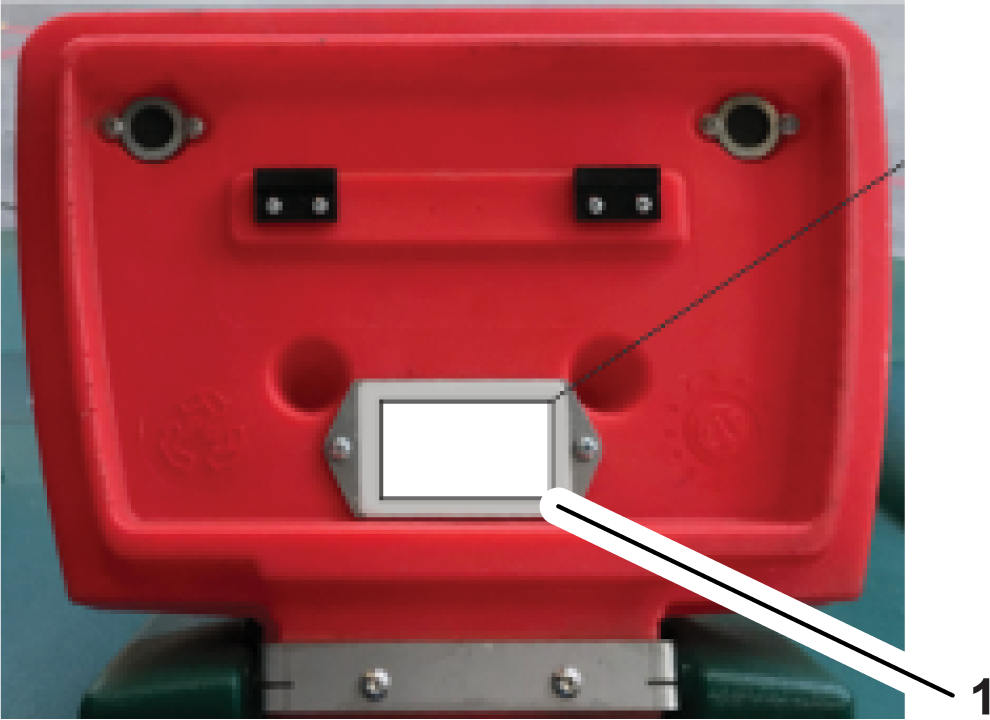
Sarjanumerotarra
Tunnistemerkintä
on Stop-painikkeen kannen sisäpuolella alla olevan kuvan mukaisesti.
G541779
-
Sarjanumerotarra
Anturin yleiskatsaus
Laite on varustettu useilla
antureilla, jotka varmistavat sen turvallisen toiminnan. Nämä
anturit varmistavat, että robotti havaitsee
ja reagoi, jos sen tiellä on este.
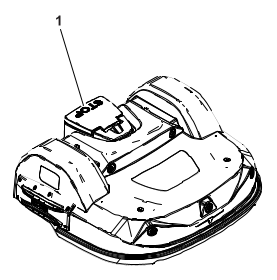
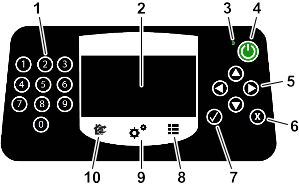
Stop-painike
Stop-painike  on helposti näkyvissä
robotin päällä. Kun tätä painiketta painetaan,
robotti lakkaa liikkumasta ja leikkaamasta. Stop-painike
toimii myös kantena, jota nostamalla voidaan
käyttää robotin hallinnan käyttöliittymää.
Robotti voidaan käynnistää uudelleen
antamalla ohje tässä käyttöliittymässä.
on helposti näkyvissä
robotin päällä. Kun tätä painiketta painetaan,
robotti lakkaa liikkumasta ja leikkaamasta. Stop-painike
toimii myös kantena, jota nostamalla voidaan
käyttää robotin hallinnan käyttöliittymää.
Robotti voidaan käynnistää uudelleen
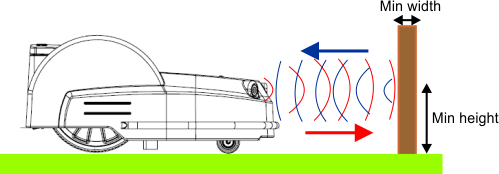
antamalla ohje tässä käyttöliittymässä. Esteentunnistuksen äänianturit
Robotti on varustettu ääniantureilla
esteiden havaitsemiseksi. Robotti hidastaa nopeutta, jos äänianturit
havaitsevat esteen.
Esteiden havaitseminen ääniantureilla
G525070
Jos robotti liikkuu aina
hitaalla nopeudella, vaikka näkyvissä ei olisi esteitä,
antureissa on ongelma. Ota tällöin yhteys
huoltopalveluun ja pyydä apua ongelman selvittämiseen.
Puskuri
Puskuri
on paineanturi, joka havaitsee, kun robotti koskettaa estettä.
Kun puskuri koskettaa estettä, robotti liikkuu taaksepäin
ja kääntyy sellaiseen kulmaan,
että se voi välttää esteen.
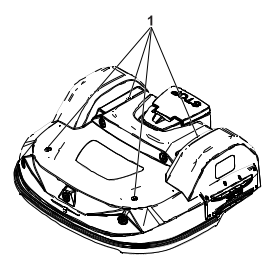
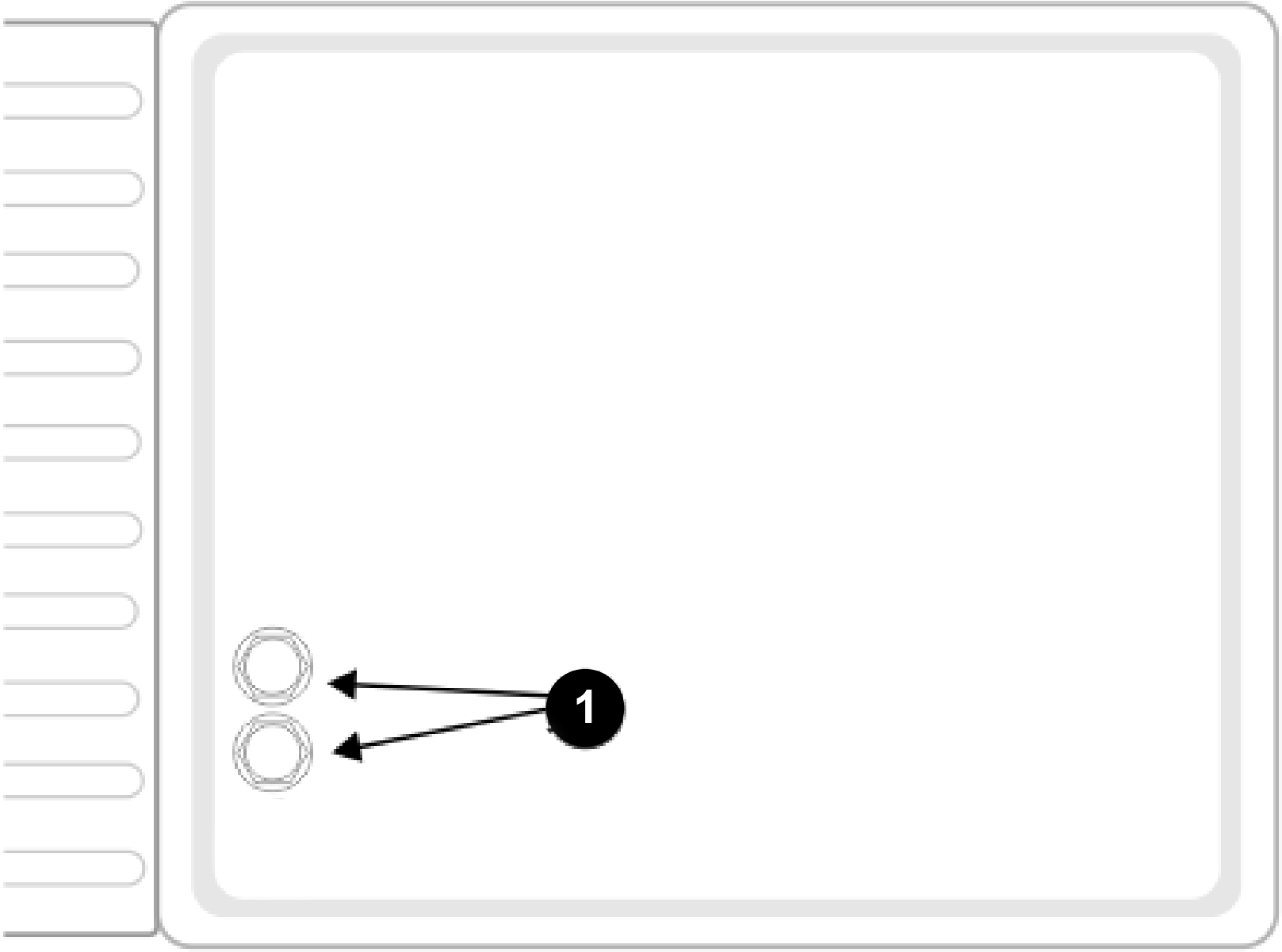
Noston ja paikaltaan siirron anturit
Nostoanturilisälaitteiden
sijainti
G538312
-
Nostoanturilisälaitteet
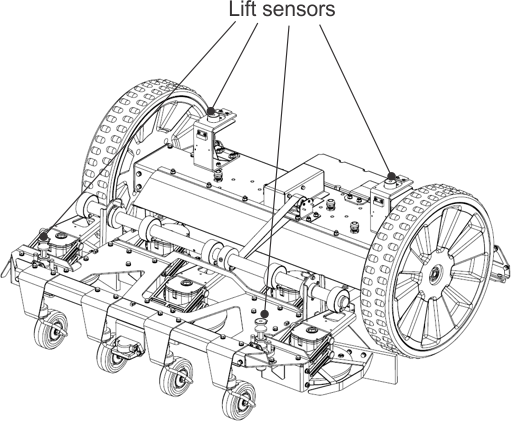
Nostoanturit (kuvassa on 500-sarja)
G525072
Nostoanturit on kiinnitetty
robotin runkoon neljään kohtaan. Nostoanturit reagoivat,
jos robotti koskettaa matalaa esinettä,
joka työntää runkoa ylöspäin tai jos
joku yrittää nostaa runkoa. Robotti lopettaa leikkuun ja
siirtyy taaksepäin. Jos tämä
liike vapauttaa esteen rungosta, robotti tekee liikkeen, jolla
se välttää esteen, ja jatkaa leikkaamista. Jos este
ei vapaudu rungosta, kymmenen sekunnin
kuluttua robotti rekisteröi hälytyksen ja pysyy turvatilassa
(paikallaan), kunnes este poistetaan.
Käämi
Induktiokäämi havaitsee
rajajohdon sisäpuolelle muodostuvan magneettikentän voimakkuuden.
Enimmäisvoimakkuus on johdossa, mikä
saa robotin pysähtymään, kääntymään
ja jatkamaan sitten leikkaamista uuteen suuntaan.
Kallistusanturi
Kaltevuusanturi havaitsee robotin
työstämän rinteen kaltevuuden. Robotti antaa hälytyksen
ja lakkaa liikkumasta, jos kulma ylittyy.
Kaatumisanturi
Kaatumisanturi havaitsee, jos
robotti kierähtänyt ylösalaisin tai jos joku yrittää
käynnistää moottoria, kun robotti on ylösalaisin.
Lämpötila-anturi
Lämpötila-anturi mittaa
ympäristön lämpötilaa ja estää robottia
toimimasta, jos lämpötila on liian alhainen. Toimintalämpötilaksi
on asetettu vähimmäislämpötila,
jossa robotti voi toimia.
RTK GPS ‑vastaanotin
Tämä anturi kerää
tietoja satelliiteista robotin tarkan globaalin sijainnin määrittämiseksi.
Lisälaitteet/lisävarusteet
Koneeseen on saatavana
valikoima Toron hyväksymiä lisälaitteita
ja -varusteita, joiden avulla voidaan parantaa ja laajentaa sen ominaisuuksia.
Ota yhteys valtuutettuun huoltoliikkeeseen tai
valtuutettuun Toro-jälleenmyyjään
tai siirry osoitteeseen www.Toro.com, jossa on luettelo
hyväksytyistä lisälaitteista ja -varusteista. Käytä
vain Toro-alkuperäisvaraosia
ja -lisävarusteita, jotta kone toimii parhaalla mahdollisella
tavalla ja sen turvasertifiointi pysyy voimassa.
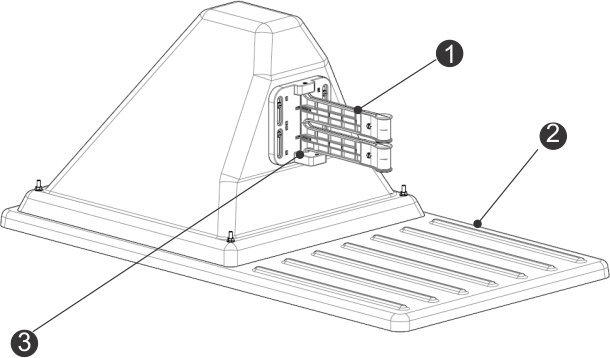
Latausaseman yleiskatsaus
Huomaa: Kuvassa on malli 30914EU. Eri mallit näyttävät hieman
erilaiselta. Katso lisätietoja latausoppaasta.
Latausaseman osat
G520730
- Latausvarret
- Pohja
- Varausanturi
Latausasema takaa päin
G537669
- Za-LED-merkkivalo
- ZL-LED-merkkivalo
- Tunnistemerkintä
- Tarra
- Virtajohdon
tulo
Latausasema alapuolelta
LED-merkkivalot
LED-merkkivalot näyttävät
kunkin johdon senhetkisen tilan. Katso lisätietoja seuraavasta
taulukosta.
| Vihreä – vilkkuu
|
Johto toimii normaalisti. |
| Punainen – vilkkuu
|
Rajajohtoa ei havaita. Johto on
ehkä katkaistu, tai se on liian pitkä.
|
| Punainen – tasainen
|
Tämä ilmaisee ongelmaa.
Johto on ehkä liian lyhyt (alle 200 m), tai elektroniikassa
on ongelma. |
LED-merkkivaloissa on seuraavat
merkinnät:
- ZL: aseman silmukka-alueen johto
- Za: työskentelyalueen A johto
- Zb: työskentelyalueen B johto
Huomaa: Jos käytät latausasemaa useiden silmukoiden kanssa, mutta
yksi silmukoista ei ole käytössä, LED-merkkivalo vilkkuu
punaisena. Voit lopettaa LED-merkkivalon
vilkkumisen punaisena asettamalla piirilevyn kanavaksi 9.
Tekniset tiedot
Huomaa: Ominaisuuksia ja rakennetta voidaan muuttaa ilmoittamatta.
Kapasiteetti
| Enimmäistyöskentelyalue
[m2]
|
75 000 m2 |
75 000 m2 |
45 000 m2 |
| Suositeltu työskentelyalue
[m2]
|
55 000 m2 |
55 000 m2 |
35 000 m2 |
| Leikkuuleveys [mm] |
1 033 mm |
1 033 mm |
633 mm
|
| Työskentelynopeus [km/h] |
3,6 km/h
|
3,6 km/h
|
2,8 km/h
|
| Enimmäiskaltevuus [%] |
45 % (24°) |
30 % (17°) |
35 % (19,5°) |
Leikkuu
| Leikkuupäiden määrä |
5
|
3
|
| Leikkuuterien määrä |
15
|
9
|
| Pienin leikkuukorkeus (vakiokiekko
/ matala kiekko) |
20 mm / 15 mm |
20 mm / 15 mm |
| Suurin leikkuukorkeus (vakiokiekko
/ matala kiekko) |
100 mm / 90 mm |
100 mm / 90 mm |
| Leikkuupäiden säätö |
Sähköinen |
Sähköinen |
| Melutaso enintään (mitattuna
5 m:n etäisyydeltä)
|
52 dB(A)
|
52 dB(A)
|
Akku
| Tyyppi
|
LIFePo4
|
LIFePo4
|
| Nimellisjännite [V] |
25,6 V
|
25,6 V
|
| Nimelliskapasiteetti [Ah] |
19,0 Ah
|
19,0 Ah
|
| Energia [Wh]
|
486,4 Wh
|
486,4 Wh
|
| Työskentelylämpötila-alue |
−5…+60 °C
|
−5…+60 °C
|
| Keskimääräinen
leikkuuaika [min] |
110
|
280
|
| Keskimääräinen
aika täyteen lataukseen [min]
|
90
|
90
|
Paino ja mitat
| Paino [kg]
|
71 kg
|
52 kg
|
| Pituus [mm]
|
1 110 mm |
1 002 mm |
| Leveys [mm]
|
1 278 mm
|
1 044 mm |
| Korkeus [mm]
|
515 mm
|
466 mm
|
Ohjelmisto ja valvonta
| Suojauksen PIN-koodi |
Kyllä
|
Kyllä
|
| GPS-sijainti
|
RTK
|
RTK
|
| Robotin hallinta palvelimen ja
sovelluksen kautta. |
Vakio
|
Vakio
|
Älykkyys
| Esteiden havaitseminen ääniantureilla |
Useita
|
Useita
|
| Paluu asemalle GPS:n avulla |
Kyllä
|
Kyllä
|
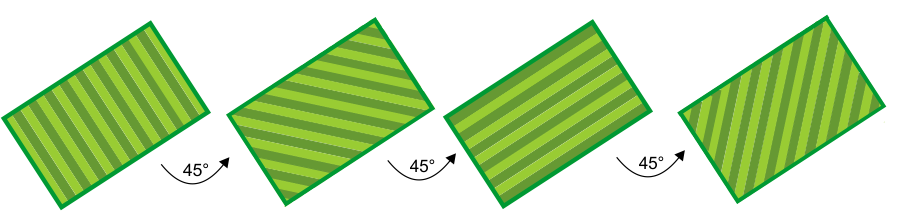
| Leikkuutyyppi
|
Kuvio
|
Kuvio
|
| Usean aloituksen alue |
Kyllä
|
Kyllä
|
| Useita kenttiä (valinnainen) |
Kyllä
|
Kyllä
|
| Useita robotteja/asemia |
Ei
|
Ei
|
| Äänianturit esteiden
havaitsemiseen |
5
|
5
|
| Resistiivinen puskuri törmäystä
varten |
1
|
1
|
| Etunostoanturit
|
2
|
2
|
| Takanostoanturit
|
2
|
2
|
| Takatörmäysanturit |
2
|
2
|
| Kaatumis-/kallistusanturi |
1
|
1
|
| Leikkuupäiden suuntaimet |
2 (yksi kussakin ulommassa leikkuupäässä) |
Ei mitään |
Kunnossapito
Kunnossapidon yleiskatsaus
- Huolto tarkoittaa tehtäviä,
jotka on suoritettava säännöllisesti leikkuukauden
aikana.
- Huoltoväli riippuu jossain
määrin robotin käyttökuormituksesta, mutta on
suositeltavaa, että valtuutettu teknikko huoltaa
sen vähintään kerran vuodessa.
- Varmista robotin optimaalinen
suorituskyky huoltamalla sitä, mutta älä yritä
tehdä siihen muutoksia. Se voi häiritä robotin
toimintaa, aiheuttaa onnettomuuden ja vaurioittaa
osia.
Huomaa: Jos havaitset epätavallista toimintaa tai vaurioita, ota yhteys
teknikkoon.
- Näitä huoltotoimenpiteitä
suoritettaessa on noudatettava seuraavia turvamääräyksiä:
- Pysäytä laite: katkaise
aina virta ja odota, että kaikki liikkuvat osat ovat pysähtyneet,
ennen kuin käsittelet laitetta.
- Aktivoi estolaite ennen seuraavia:
- ennen laitteen huoltamista tai
nostamista
- ennen tukkeuman poistamista
- ennen laitteen tarkastamista,
puhdistamista tai huoltamista
- ennen laitteen tarkistamasta vaurioiden
varalta, jos se on osunut vierasesineeseen
- jos laite alkaa täristä
epänormaalisti.
- Huolehdi, että mutterit,
pultit ja ruuvit ovat tiukalla, jotta laitetta on turvallista käyttää.
- Käytä käsineitä:
suojakäsineitä on käytettävä aina laitetta
käsiteltäessä.
- Käytä aina alkuperäisen
laitevalmistajan osia (OEM-osia). Muiden kuin OEM-osien käyttö
voi johtaa onnettomuuksiin, ja lisäksi
se mitätöi takuun mahdollisten vaurioiden
varalta.
Suositeltu huoltoaikataulu
Huomaa: Robotin tavanomaisen käyttäjän on suoritettava nämä
toimenpiteet suositelluin aikavälein.
Huomaa: Leikkuukauden aikana on tarkistettava säännöllisesti,
että kaikki ruuvit, mutterit ja pultit on kiristetty kunnolla.
Kiristä kaikki mahdollisesti löystyneet
kiinnikkeet, ja jos huomaat vaurioita tai merkkejä ongelmasta,
ota yhteys valtuutettuun Toro-jälleenmyyjään.
| Aina ennen käyttöä
tai päivittäin
|
|
| 40 käyttötunnin
välein |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 6 kuukauden välein |
|
|
|
| Vuosittain tai ennen varastointia |
|
| |
Leikkuuyksikön huolto
Leikkuuyksikön tarkastus
-
Tarkasta
terät, teräpultit ja leikkuukiekkokokoonpano viikoittain,
jotta leikkuu toimii asianmukaisesti.
Leikkuuterien vaihto
Leikkuuterien
kunto on olennaisen tärkeää hyvän leikkuutoiminnan
kannalta. Terien käyttöikä riippuu useista tekijöistä.
Leikkuukiekkokokoonpanon osat on vaihdettava
aina, kun ne ovat vaurioituneet.
 |
Vaara |
|
Terät ovat teräviä,
ja niiden koskettaminen voi johtaa kuolemaan tai vakavaan loukkaantumiseen.
Ole
varovainen, kun vaihdat tai puhdistat teriä.
-
Käännä
kiekkoa niin, että terää paikallaan pitävän
ruuvin kanta tulee näkyviin.
-
Irrota terä
irrottamalla ruuvi.
-
Asenna uusi
terä ja kiristä ruuvi.
Huomaa: Kun leikkuupäitä on käsitelty millään tavoin,
pyöritä niitä kaikkia erikseen ja varmista, että
yhden leikkuupään pyörittäminen
ei saa muita pyörimään.
Terän vaihdon yleiskatsaus
Terien vaihtoväli
riippuu robottityypistä, sen käytöstä ja nurmesta,
jolla se työskentelee. Koska terien kunto on välttämätön
hyvän leikkuutuloksen kannalta, on suositeltavaa
tarkastaa ne joka viikko asennuksen jälkeen ja jokaisen uuden
leikkuukauden alussa.
Pantografin
avulla terä voi seurata maan muotoja. Jos pantografi ei toimi
oikein, terät voivat tylsyä tai rikkoutua. Pantografi
on tarkastettava ja puhdistettava säännöllisesti.
Seuraavassa
luettelossa kerrotaan, miten leikkuuterien käyttöikää
voidaan pidentää.
- Varmista, että maasto on
tasainen. Jos maastossa on isoja töyssyjä tai kuoppia, leikkuupää
ei ehkä pysty seuraamaan maaston
muotoja ja terät voivat osua maahan. Yritä tasoittaa maastoa
ja tarvittaessa jätä hyvin epätasaiset kohdat pois
leikkuualueelta.
Huomaa: Latausaseman lähellä voi näkyä uria. Siksi on
suositeltavaa tasoittaa maa aseman lähellä tai asentaa tekonurmi.
- Poista myyrien tekemät kasat.
Jos robotti osuu myyrän kasaan, terät hidastuvat tai voivat
pysähtyä. Myyrän kasan ohittamisen
jälkeen terän nopeus palautuu normaaliksi.
Maaston vastus ja nopeuden muutokset saattavat löysätä
ruuveja (tai vahingoittaa ruuvin reikää).
- Vältä ruohottomia kohtia.
Nurmialueen ruohottomat kohdat saavat pyörimisnopeuden muuttumaan.
Jos tällainen nopeuden muutos tapahtuu
liian usein, se voi vaurioittaa tappia ja ruuvin reikää.
Tätä ongelmaa voidaan ehkäistä nostamalla leikkuukorkeutta
niin, että robotti leikkaa vähemmän
ruohoa ja nopeuserot pienenevät. Vaihtoehtoisesti ruohottomiin
kohtiin voidaan kylvää siemeniä.
- Vältä kosketusta nailonisiin
maamerkkeihin. Ne voivat tylsyttää teriä. On suositeltavaa
laskea ne leikkuukorkeuden alapuolelle.
- Vältä matalia kiinteitä
esteitä nurmella. Näitä ovat esimerkiksi sadettimet,
kivet ja juuret. Kivet ja muut siirrettävät esineet
on poistettava. Pysyviä kiinteitä
esineitä, kuten sadettimia, voidaan välttää asettamalla
leikkuukorkeus estettä korkeammaksi
tai mukauttamalla leikkuualuetta.
Huomaa: Siirrettävät maalit ovat toinen esimerkki kiinteästä
esteestä, jota robotti ei voi havaita. Varmista ennen leikkuuta,
että ne on poistettu.
- Poista korkeat rikkaruohot rajajohdon
läheltä. Jäykät korkeat kasvit voivat tylsyttää
tai vahingoittaa terää. Siksi on suositeltavaa
pitää rajajohdon ympärillä
olevat alueet paljaina.
Puhdistus
Laitteen puhdistus
Märissä
sääolosuhteissa on varmistettava, että mutaa ja ruohoa
ei kerry liikkuviin osiin eli pyöriin ja leikkuupäihin.
Ne on tarkastettava ja puhdistettava päivittäin.
-
Pysäytä
robotti painamalla punaista painiketta.
-
Käännä
laite takaosa alaspäin.
-
Katkaise
virta laitteesta.
-
Poista ruoho-
ja likakertymät puhaltimella, paineilmalla ja/tai teräsharjalla.
-
Hankaa runkoa
pehmeällä, kostealla liinalla tai sienellä.
-
Jos runko
on erittäin likainen, käytä saippualiuosta.
Liuottimia
ei saa käyttää.
Latauskoskettimien puhdistus
-
Hiero latauskoskettimien
pintoja hiomapaperilla (karkeus 280), kunnes ne näyttävät
puhtailta.
Puskurin puhdistus
-
Tarkista,
että puskurin materiaali on ehjä. Jos havaitset viiltoja
tai repeytymiä, ota yhteys valtuutettuun Toro-jälleenmyyjään.
-
Puhdista
puskuri kostealla liinalla.
Äänianturien puhdistus
Äänianturit on pidettävä
puhtaina, jotta ne toimivat oikein. Kaikkien anturien on toimittava
asianmukaisesti. Jos jokin antureista ei toimi
oikein, laite antaa hälytyksen.
-
Poista muta,
ruoho ja lika ja pyyhi kostealla liinalla.
Etupyörien puhdistus
-
Poista muta
ja ruoho teräsharjalla tai liinalla.
-
Tarkista,
että pyörät pyörivät helposti ja että
välystä ei ole liikaa. Jos välystä on liikaa,
vaihda pyörät.
Etupyörien akselin puhdistus
-
Puhdista
etupyörien akseli harjalla ja/tai liinalla.
-
Tarkasta
akseli silmämääräisesti. Jos ongelmia ilmenee,
vaihda akseli.
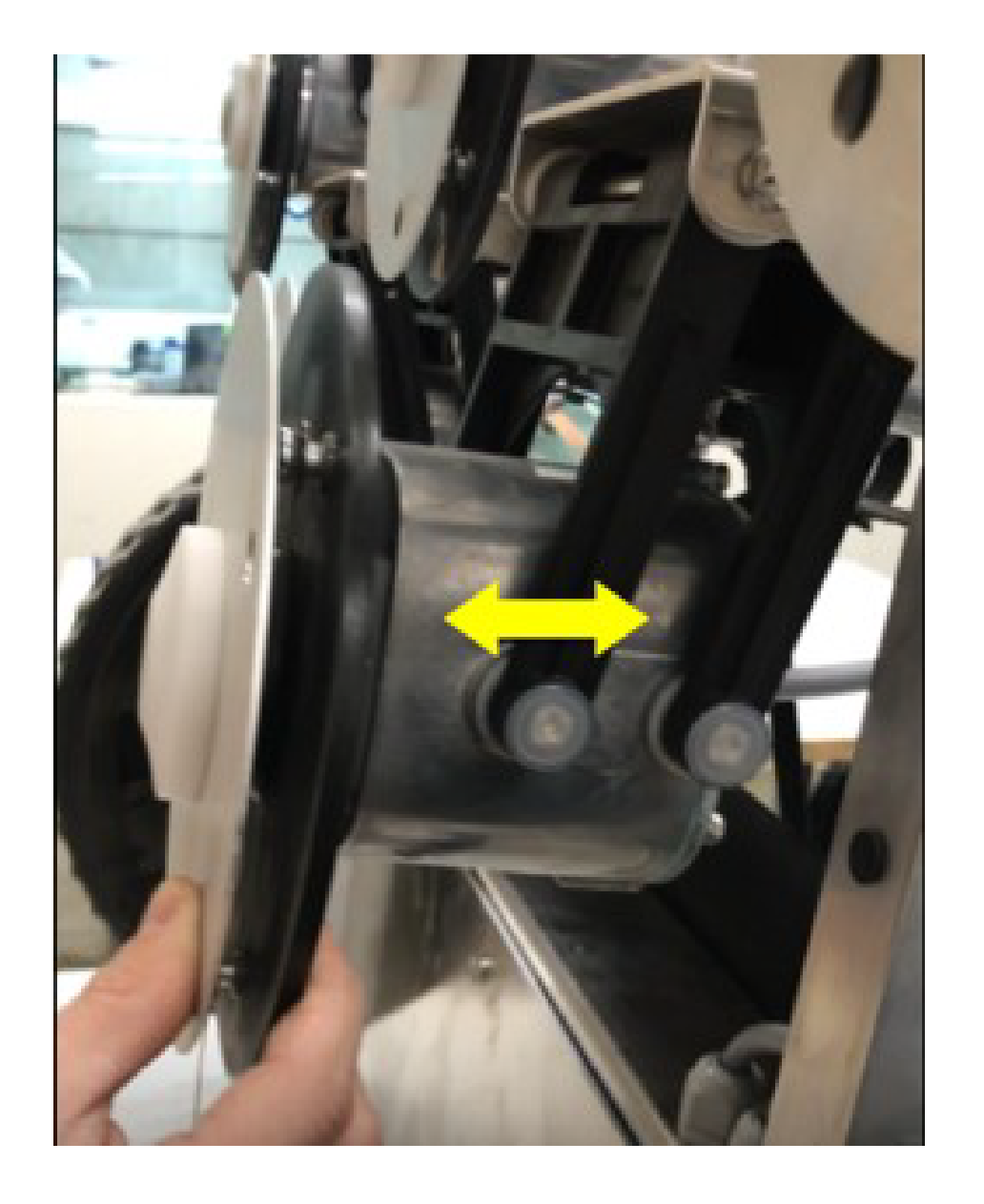
Leikkuupään puhdistus
-
Puhdista
leikkuupää harjalla. Paineilman käyttö on suositeltavaa,
jos sitä on saatavilla.
-
Tarkista,
että koko leikkuupää liikkuu tasaisesti taaksepäin
ja eteenpäin seuraavan kuvan nuolen osoittamalla tavalla.
Leikkuukiekon puhdistus
Tämä toimenpide on suoritettava
viikoittain. Tämä on tärkeää, jos leikkuukorkeudeksi
on asetettu enintään 25 mm. Tällöin kitkanestolevy
kuluu enemmän ja se on vaihdettava vähintään
kahden kuukauden välein.
-
Puhdista
leikkuukiekko harjalla. Paineilman käyttö on suositeltavaa,
jos sitä on saatavilla.
-
Tarkista,
että leikkuulevy pyörii tasaisesti. Jos ongelmia ilmenee,
vaihda leikkuukiekot.
Takapyörien puhdistus
-
Poista muta
ja ruoho teräsharjalla.
Sähköjärjestelmän
huolto
Johtojen tarkistus
-
Tarkasta
robotin alaosassa olevat johdot silmämääräisesti.
Jos havaitset ongelmia, ota yhteys valtuutettuun Toro-jälleenmyyjään.
Akun huolto
Robotin automaattinen (ohjelmoitu)
toiminta optimoi akun keston. On suositeltavaa antaa robotin itse
hallita työskentelyjaksojaan. Jos nämä
työskentelyjaksot vaikuttavat epätavallisen lyhyiltä,
pyydä valtuutettua Toro-jälleenmyyjää tarkistamaan
akun kunto.
Huomaa: Näitä jaksoja voidaan valvoa portaalista.
Sanasto
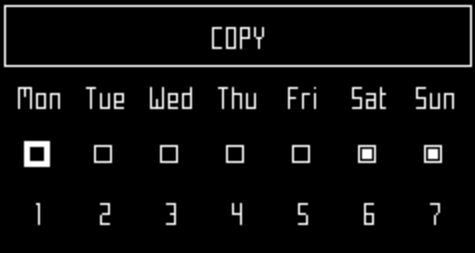
Reunatila
Kun robotti leikkaa ruohon
kentän reunimmaisella alueella. Tämä tehdään
useita kertoja viikossa.
Jakso
Jakso on robotin työskentelykerta.
Se alkaa, kun robotti poistuu asemalta, ja päättyy, kun
se palaa asemalle tai kun ilmenee työskentelyjakson
keskeyttävä ongelma.
Kokonaisuus
Ryhmä robotteja ja
käyttäjiä, jotka toimivat alueella. Tiedot kokonaisuuteen
sisältyvistä roboteista on nähtävissä verkkoportaalissa.
GPS-navigointialue
Tämä
on RTK GPS ‑alue, joka määritetään
reunan määritysprosessissa ja joka kattaa koko työskentelyalueen.
Tämän jälkeen voidaan luoda ala-alueita
kopioimalla ja muokkaamalla tätä aluetta ja siten
optimoida robotin tehokkuus.
GPS-piste
Tietty palstalla oleva
piste, jota robotti käyttää asemalle palaamiseen tai
sieltä poistumiseen. Piste määritetään sen
leveys- ja pituusasteiden mukaan. Robotti kulkee
suoraan tähän pisteeseen ja palaa sitten asemalle seuraamalla
reunaväylää ja silmukkajohtoa.
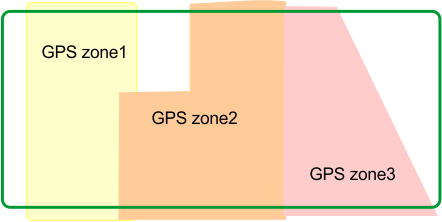
GPS-alue
GPS-alue määritetään
GPS-koordinaattien perusteella. Näin johdotettu palsta voidaan
jakaa ala-alueisiin tarvitsematta käyttää
lisäjohtoja tai -kanavia.
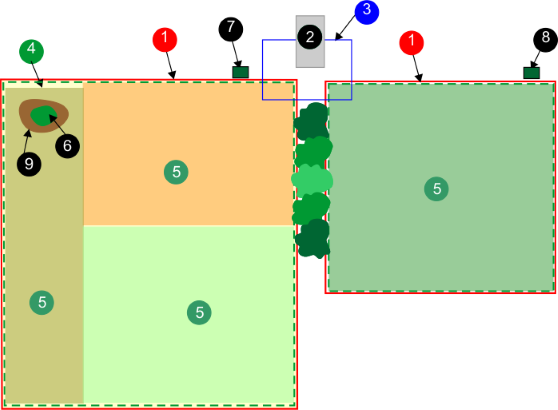
Johdotetun palstan GPS-alueet
G520046
Tämä tarjoaa lisää
joustavuutta työskentelyalueiden määritykseen, koska
robotti voidaan ajoittaa toimimaan optimaalisella
tehokkuudella eri alueilla.
Paikallaan
Robotti siirtyy paikallaan-tilaan,
jos nykyinen tehtävä on lopetettu Stop-painikkeella. Oletusarvoisesti
robotti siirtyy lepotilaan 15 minuutin kuluttua.
Saari
Rajajohdon silmukka, joka
on erityisesti asennettu estämään robotin työskentely
sen sisällä. Rajajohto viedään esteen ympäri,
ja lähestymis- ja paluujohdot asetetaan vierekkäin.
Kartta
Kartta robottien reiteistä
portaalissa.
Kartoitus
Tiedot, jotka robotti rakentaa
GPS-tietojen perusteella.
Kielletty alue
GPS:n määrittämät
kielletyt alueet ovat sellaisia GPS-koordinaattien määrittämiä
kohtia kentällä, jonne robotti ei voi koskaan
mennä missään autonomisissa toimintatiloissaan.
GPS:n määrittämiä kiellettyjä alueita käytetään
sulkemaan pois sellaisia alueita robotin työskentelyalueelta,
joita ei voida tunnistaa reunan määrityksen aikana. GPS:n
määrittämien kiellettyjen alueiden
avulla robotti voi laskea tehokkaimman leikkuukuvion etukäteen.
GPS:n määrittämiä kiellettyjä alueita käytetään
poissulkemaan esteitä, jotka koostuvat yleensä
saarista ja keinosaarista.
Este
Kohde, jota robotin on vältettävä
kentällä. Esteet voivat olla pysyviä (kuten puita tai
kalusteita) tai väliaikaisia (kuten eläimiä).
Anturit havaitsevat esteet. Pysyviä esteitä voidaan välttää
tekemällä rajajohtoon silmukoita ”saaria” tai ”keinosaaria” varten.
Palsta
Rajajohdon sisäpuolella
oleva leikattava alue. Yhteen johtoon on liitetty vähintään
yksi palsta. Useita palstoja voidaan määrittää.
Prosentti
Tämä tarkoittaa
sitä, kuinka paljon aikaa robotti käyttää työskentelyyn
tietyllä palstalla. Jos palstoja on vain yksi, robotti
käyttää kaiken aikansa siellä.
Rajajohto
Kentän pinnan alle
asetettu johto, joka määrittää robotin työskentelyalueen.
Rajajohdon määrittämää aluetta kutsutaan
palstaksi.
Keinosaari
Rajajohto viedään
esteen ympäri siten, että lähestymis- ja paluujohtojen
välillä pysyy tietty etäisyys.
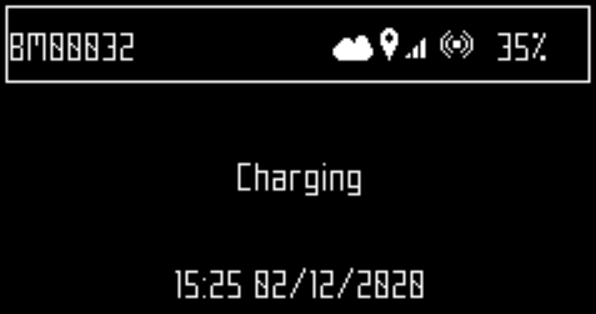
Robotin tila-arvot
- Off (Pois)
Robotin virta on katkaistu.
- Off after alarm (Virta katkaistu
hälytyksen jälkeen)
Robotti
on itse katkaissut virran hälytyksen jälkeen.
- Alarm (Hälytys)
Robotti on hälytystilassa.
- Staying (Pysyminen)
Robotti odottaa latausasemassa.
- Charge (Lataus)
Robotin akkua ladataan.
- Heading for unload station (Liikkuu
purkuasemalle)
Robotti on
menossa pudotuskuoppa-asemalle pallojen purkamista varten. Tämä
tila alkaa, kun robotti päättää palata asemalle.
- Heading for charge station (Liikkuu
latausasemalle)
Robotti on
menossa latausasemalle. Tämä tila alkaa, kun robotti päättää
palata asemalle.
- Leaving station (Poistuu asemalta)
Robotti on poistumassa asemalta
ja aloittamassa työskentelyn.
RTK GPS ‑alue
Kuvioleikkuuta suorittavan robotin
työskentelyalue. RTK GPS ‑alueen määrittää
robotti, joka tekee kierroksen rajajohdon luona.
Alue
Koko alue, joka sisältää
robotin työskentelyalueen.
Lepo
Robotti siirtyy lepotilaan 15
minuutin kuluttua hälytyksestä, jota ei ole poistettu. Kun
robotti on ollut kaksi päivää lepotilassa,
se siirtyy POIS-tilaan. Näin tapahtuu myös, jos
akun varaustaso saavuttaa alhaisen tason. Lepotilassa robotti käyttää
mahdollisimman vähän virtaa vähentääkseen
akkuun kohdistuvaa riskiä.
Robotin voi poistaa lepotilasta
- poistamalla hälytyksen ja
käynnistämällä robotin LED-näytön painikkeella
- työntämällä
robotin latausasemaan, jos akku on tyhjä
- lähettämällä
etäkäynnistyskomennon verkkoportaalin kautta.
Aseman silmukka
Aseman silmukka
on latausaseman ympärillä oleva lyhyt johto, jota käytetään
robotin ohjaamiseen asemalle. Kun robotti havaitsee
olevansa aseman silmukan piirissä, se seuraa johtoa, kunnes
se saapuu asemalle.
Maasto
Kenttää ympäröivä
ruohoalue, jota ei saa leikata.
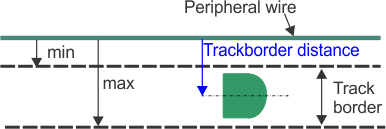
Reunaväylä
Ruohon leveys
robotin työstämän palstan reunan vierellä. Robotti
seuraa reunaväylää poistuessaan asemalta tai palatessaan
asemalle, ellei se käytä GPS:ää.
Silmukkajohdolle, jonka avulla robotti palaa asemalle, ei ole määritetty
reunaväylää.
Reunaväylä sijaitsee
rajajohdon vieressä, ja se määritetään asennusparametreiksi
asetettujen vähimmäis- ja enimmäismittojen
mukaan. Se on leveämpi kuin robotti. Robotin reitti
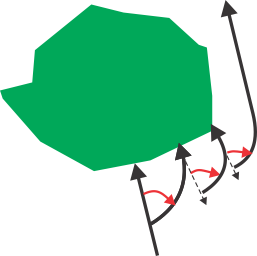
reunaväylän sisällä valitaan satunnaisesti. Näin
varmistetaan, että robotti ei liiku toistuvasti
samaa reittiä pitkin eikä tee uria kentälle. Jos robotti
kohtaa esteen ollessaan reunaväylällä, anturit
saavat sen peruuttamaan ja kääntymään
sitten satunnaiseen kulmaan, jotta se voi jatkaa etenemistä.
Tämä voidaan tarvittaessa toistaa useita
kertoja.
Liikkeet esteen välttämiseksi
reunaväylän sisällä
G520315