製品の概要
Turf Proシリーズロボット芝刈り機製品の概要
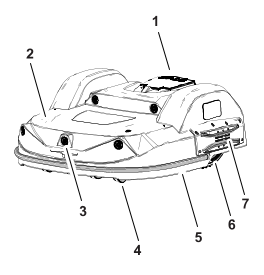
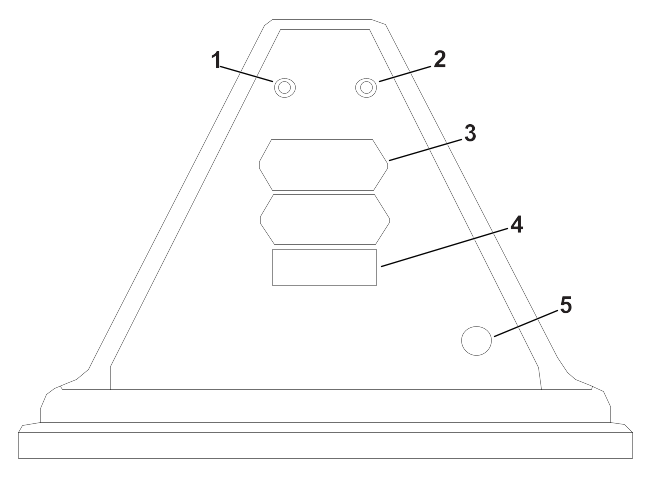
上面図
G538206
-
停止ボタン
-
本体
-
障害物検知ソナー
-
前輪
-
バンパー
-
後輪
-
充電接点
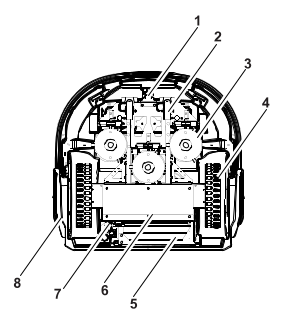
底面図(300モデル)
G538280
-
コイル
-
前輪
-
カッティングヘッド
-
後輪
-
バッテリー
-
密閉型電子ボックス(スマートボックス)
-
電源スイッチ
-
充電接点
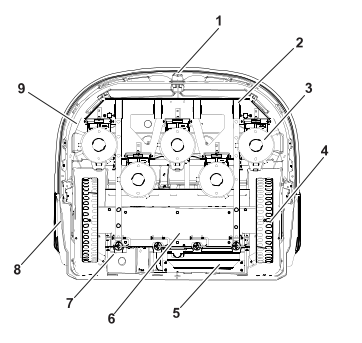
底面図(500モデル)
G529049
-
コイル
-
前輪
-
カッティングヘッド
-
後輪
-
バッテリー
-
密閉型電子ボックス(スマートボックス)
-
電源スイッチ
-
充電接点
-
ガードディスク
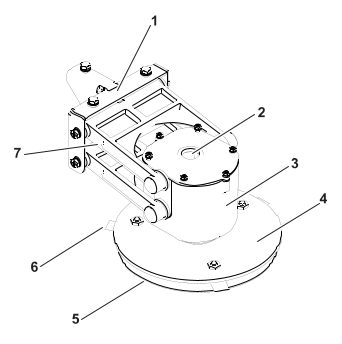
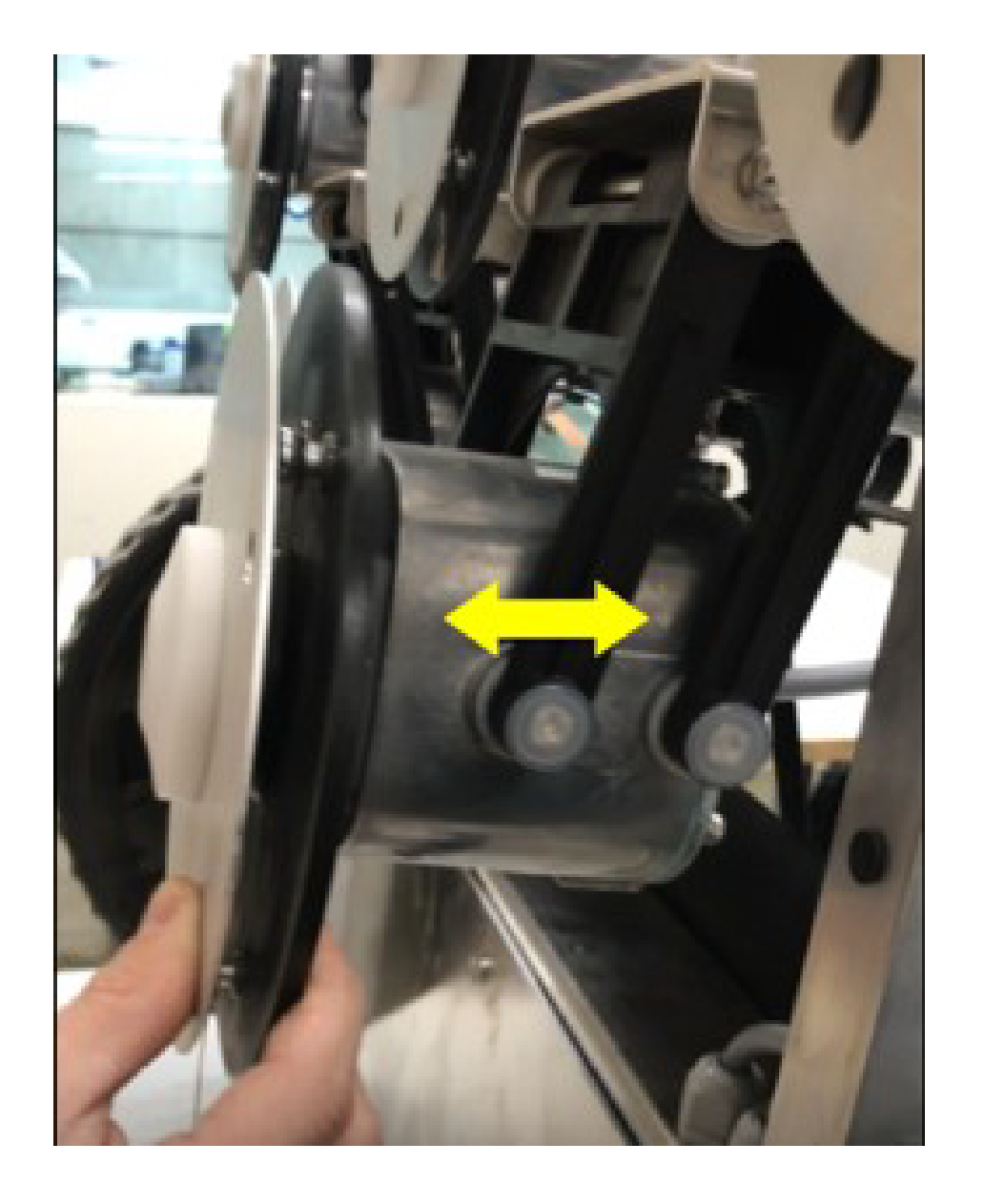
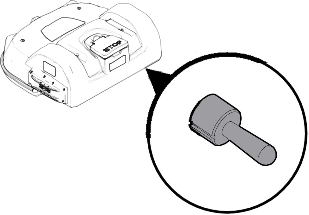
カッティングヘッド
G526500
-
ブラケット
-
ケーブル差込口
-
モーターハウジング
-
ブレードサポートディスク
-
摩耗防止ディスク
-
カッティングブレード
-
パンタグラフ
注: ブレード支持ディスク 、耐摩擦ディスク
、耐摩擦ディスク 、およびカッティングブレード
、およびカッティングブレード は、総称して「カッティングディスク」と呼ばれます。
は、総称して「カッティングディスク」と呼ばれます。
電源スイッチ(300モデル)
|
電源スイッチはロボットの左後部のシェルの下にあります。
ロボットを操作するには、電源スイッチを右(オンの位置)に動かします。
長時間使用しない場合や冬季保管する場合は、電源スイッチを左(オフの位置)に動かします。
|
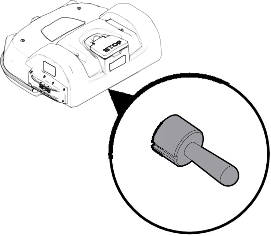
電源スイッチ(500モデル)
 |
電源スイッチはロボットの右後部のシェルの下にあります。
ロボットを操作するには、電源スイッチを上に動かしてオフの位置にする。
長時間アイドル状態にしたり、冬季に保管したりする場合は、電源スイッチをオフの位置に下げる。
|
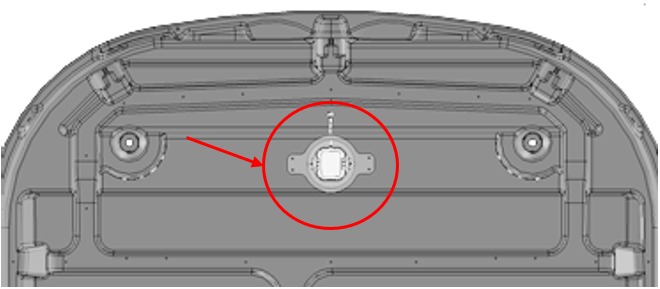
RTK GPSアンテナ
G519918
これは、シェルの前面中央に取り付けられた特定のGNSSアンテナです。これは、ロボットの位置に関するデータを衛星から受信するために使われます。
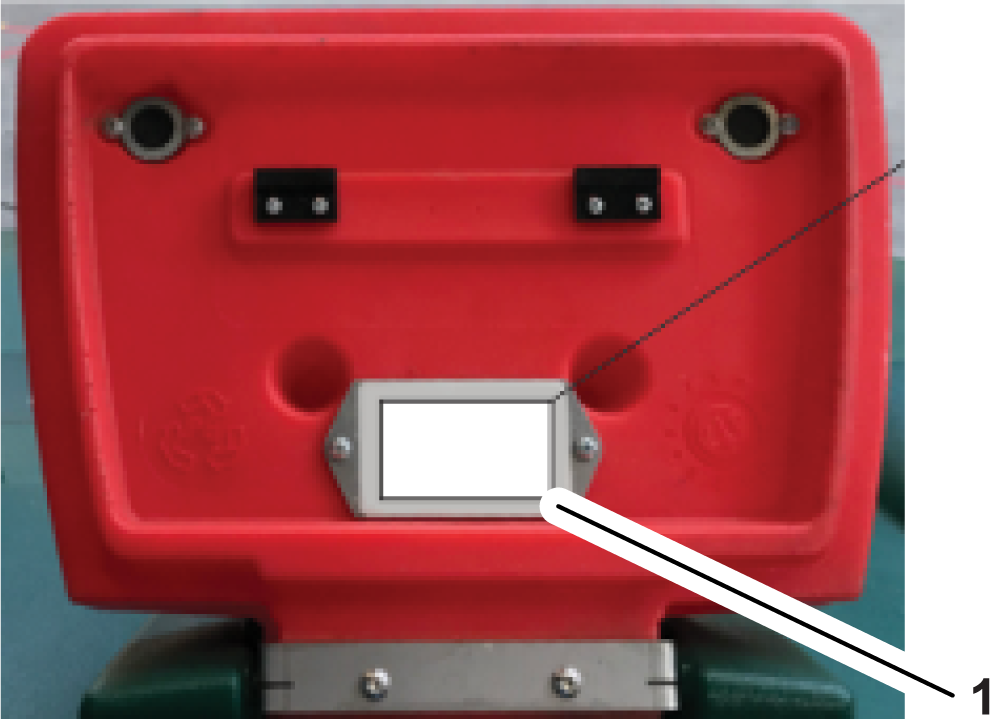
シリアルデカール
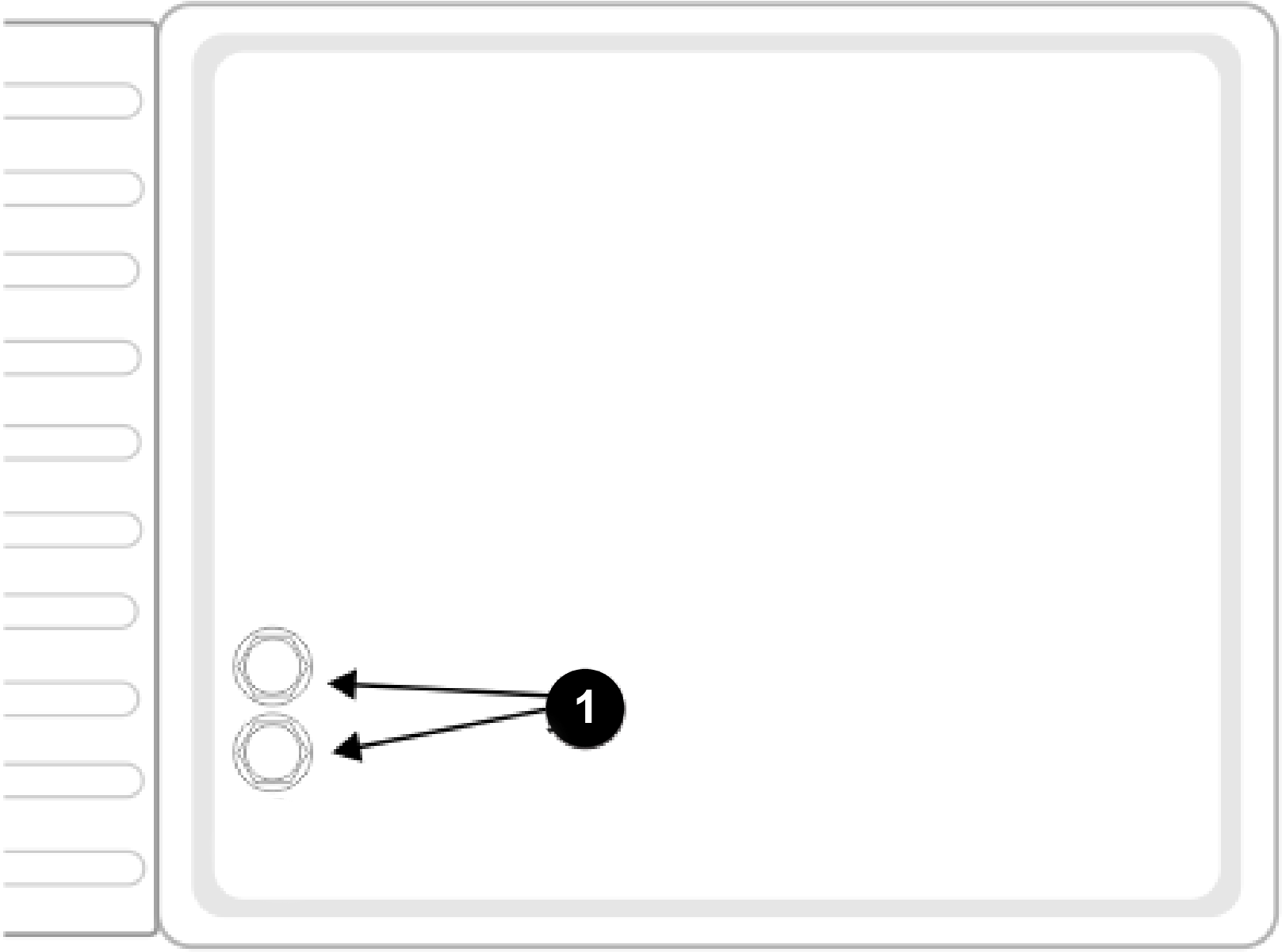
識別ラベルは、以下に示すように、停止ボタンの蓋の裏側にあります。
G541779
-
シリアルデカール
センサーの概要
このマシンには、安全な操作を保証する包括的なセンサーセットが備わっています。これらのセンサーは、障害物が通り道にある場合、ロボットがそれを検知し反応するようにします。
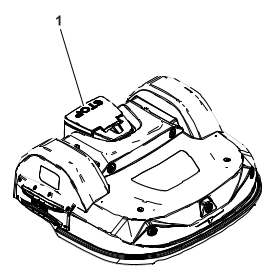
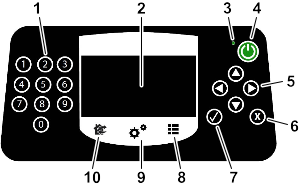
停止ボタン
停止ボタン はロボットの上部にあり、簡単に視認できます。このボタンを押すと、ロボットは移動とカッティングを停止します。停止ボタンは蓋としても機能し、持ち上げるとロボットの制御ユーザー インターフェイスにアクセスできるようになります。ロボットを再起動するには、この制御インターフェイスを使って指示を出す必要があります。
はロボットの上部にあり、簡単に視認できます。このボタンを押すと、ロボットは移動とカッティングを停止します。停止ボタンは蓋としても機能し、持ち上げるとロボットの制御ユーザー インターフェイスにアクセスできるようになります。ロボットを再起動するには、この制御インターフェイスを使って指示を出す必要があります。
障害物検知ソナー
ロボットには障害物を検出するためのソナーセンサーがいくつか装備されています。ソナー検出器が障害物を検出すると、ロボットは速度を落とします。
周囲に障害物がない場合でもロボットが常に低速で移動している場合は、センサーに問題があることを示しています。この場合は、問題の分析を助けてもらうためにサービス
チームに問い合わせます。
バンパー
バンパーは、ロボットが障害物に触れたことを感知する圧力センサーです。バンパーが障害物に接触すると、ロボットは後方に引き下がり、障害物を回避できるまで一定角度回転します。
昇降センサーと車体変位センサー
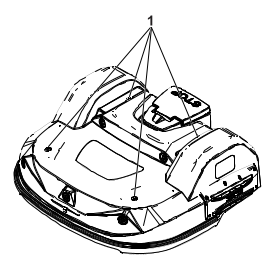
昇降センサーアタッチメントの位置
G538312
-
昇降センサーアタッチメント
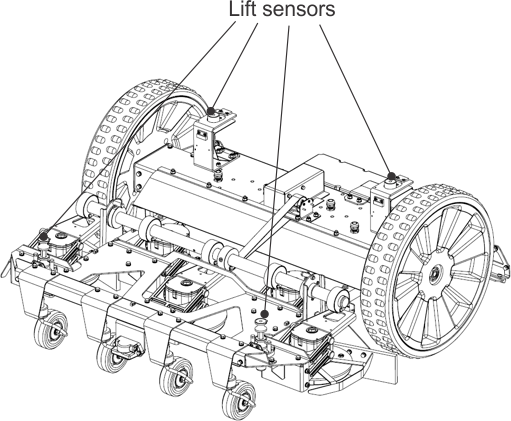
昇降センサー(500シリーズを表示)
G525072
リフトセンサーはロボット本体の4箇所に取り付けられています。ロボットが車体を押し上げるような低い物体に触れたり、誰かが車体を持ち上げようとしたりすると、リフトセンサーが反応します。ロボットは芝刈りを停止し、後退します。この動きによって障害物が本体から外れると、ロボットは障害物を回避して芝刈りを続行します。そうでない場合、ロボットは10秒後にアラームを登録し、障害物が取り除かれるまでセーフ モード (静止) のままになります。
コイル
誘導コイルは、ペリフェラルワイヤ内に発生する磁場の強度を検出します。ワイヤー上に最大の強度が発生するため、これによりロボットは停止し、回転し、新しい方向に芝刈りを続けます。
傾斜センサー
傾斜センサーはロボットが作業している斜面の角度を検出します。許容角度を超えるとアラームが鳴り、ロボットの動きが停止します。
ロールオーバーセンサー
ロールオーバー
センサーは、ロボットが逆さまになったかどうか、またはロボットが逆さまになったときに誰かがモーターを始動させようとしているかどうかを検出します。
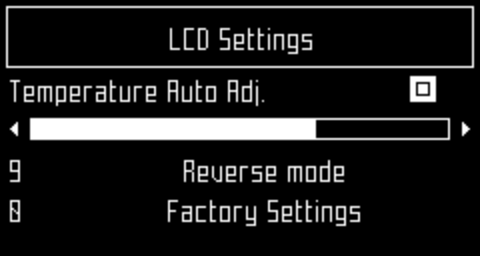
温度センサー
温度センサーは周囲温度を測定し、この温度が低すぎる場合にはロボットの動作を妨げます。ロボットが動作可能な最低温度は動作パラメータとして設定されます。
RTK GPS受信機
このセンサーは衛星からデータを収集し、ロボットの正確な位置を特定します。
アタッチメントとアクセサリ
承認されたアタッチメントおよびアクセサリToroをマシンと一緒に使用して、その機能を強化および拡張することができます。認定サービス
ディーラーまたは認定Toro代理店に問い合わせていただくか、www.Toro.com全ての認定アタッチメントおよびアクセサリのリストを参照してください。
マシンの最適なパフォーマンスと継続的な安全認証を維持するには、純正のToro交換部品とアクセサリのみを使ってください。
充電ステーションの概要
注: モデル30914EUを示していますモデルによって外観が多少異なります。詳細については、充電マニュアルを参照します。
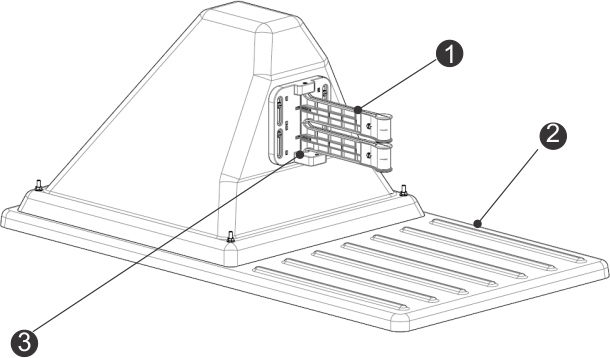
充電ステーション部品
充電ステーションの背面図
G537669
- Za LEDインジケーター
- ZL LEDインジケーター
- 識別ラベル
- デカル
- 電源ケーブル入力
充電ステーションの底面図
LEDインジケーター
LEDインジケーターは各ワイヤーの現在の状態を示します。次の表を参照してください。
| 緑色 - 点滅
|
ワイヤーは正常に動作しています。
|
| 赤色 - 点滅
|
ペリフェラルワイヤーが検出できません。ワイヤーが切れているか、長すぎる可能性があります。
|
| 赤色 - 点灯
|
これは問題を示しています。ワイヤーが短すぎる (200 m未満) か、電子機器に問題がある可能性があります。
|
LEDには次のようなラベルが付けられています。
- ZL:ステーションループゾーン用ワイヤー
- Za:作業ゾーンA用ワイヤー
- Zb:作業ゾーンB用ワイヤー
注: 複数のループを備えた充電ステーションを使っており、その内の1つを使っていない場合は、LED が赤く点滅します。LEDの赤色点滅を停止するには、ボード上のチャンネルを9にします。
仕様
注: 仕様や設計は予告なく変更されることがあります。
容量
| 最大作業面積 [m2] |
75,000 m2
|
75,000 m2 |
45,000 m2 |
| 推奨作業面積 [m2] |
55,000 m2 |
55,000 m2 |
35,000 m2 |
| 刈幅[mm]
|
1033 mm(40.7”)
|
1033 mm
|
633 mm
|
| 作業速度[kmph]
|
3.6 km/h
|
3.6 km/h
|
2.8 km/h
|
| 最大スロープ[%]
|
45% (24°)
|
30% (17°)
|
35% (19.5°)
|
カッティング
| カッティングヘッド数
|
5
|
3
|
| カッティングブレード数
|
15
|
9
|
| 最小カット高さ(標準ディスク/ローハイトディスク)
|
20 mm / 15 mm(0.8/0.6”)
|
20 mm / 15 mm |
| 最高刈り高さ(標準ディスク/ローハイトディスク)
|
100 mm / 90 mm(3.9/3.5”)
|
100 mm / 90 mm |
| カッティングヘッドの調整
|
エレクトロニック |
エレクトロニック |
| 最大騒音レベル(5 mの距離で測定)
|
52 db(A)
|
52デシベル(A)
|
バッテリー
| 種類
|
LIFePo4
|
LIFePo4
|
| 公称電圧 [V]
|
25.6 V
|
25.6 V
|
| 公称容量[Ah]
|
19.0 Ah
|
19.0 Ah
|
| エネルギー[Wh]
|
486.4 Wh
|
486.4 Wh
|
| 使用温度範囲 |
-5°C~+60°C |
-5°C~+60°C |
| 平均芝刈り時間 [分]
|
110
|
280
|
| フル充電までの平均時間 [分]
|
90
|
90
|
重量と寸法
| 重量[kg]
|
71 kg(156.5 lb) |
52 kg (114.6 lb)
|
| 長さ[mm]
|
1,110 mm(43.7”)
|
1,002 mm
|
| 幅[mm]
|
1,278 mm(50.3”)
|
1,044 mm
|
| 高さ[mm]
|
515 mm(20.2”)
|
466 mm
|
ソフトウェアとモニタリング
| セキュリティPINコード
|
あり
|
あり
|
| GPS位置情報 |
RTK
|
RTK
|
| サーバーとアプリによるロボット管理。 |
標準装備 |
標準装備 |
インテリジェンス
| ソナーによる障害物の検知
|
複数
|
複数
|
| GPSを介してステーションに戻る
|
あり
|
あり
|
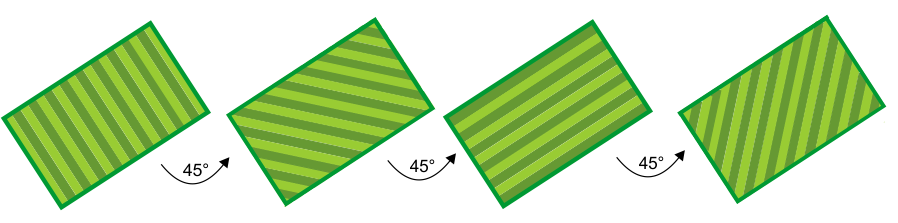
| 芝刈りの種類
|
パターン入り
|
パターン入り
|
| 複数の開始ゾーン
|
あり
|
あり
|
| マルチフィールド(オプション)
|
あり
|
あり
|
| マルチロボット/ステーション |
なし
|
なし
|
| 障害物検知用ソナー |
5
|
5
|
| 衝突用抵抗バンパー |
1
|
1
|
| フロントリフトセンサー |
2
|
2
|
| リアリフトセンサー |
2
|
2
|
| 後部衝突センサー |
2
|
2
|
| ロールオーバー/チルトセンサー |
1
|
1
|
| カッティングヘッドディフレクター |
2(各アウターカッティングヘッドに1つ)
|
なし
|
用語集
境界モード
ロボットがフィールドの端の草を刈るとき。これは週に何度も行われます。
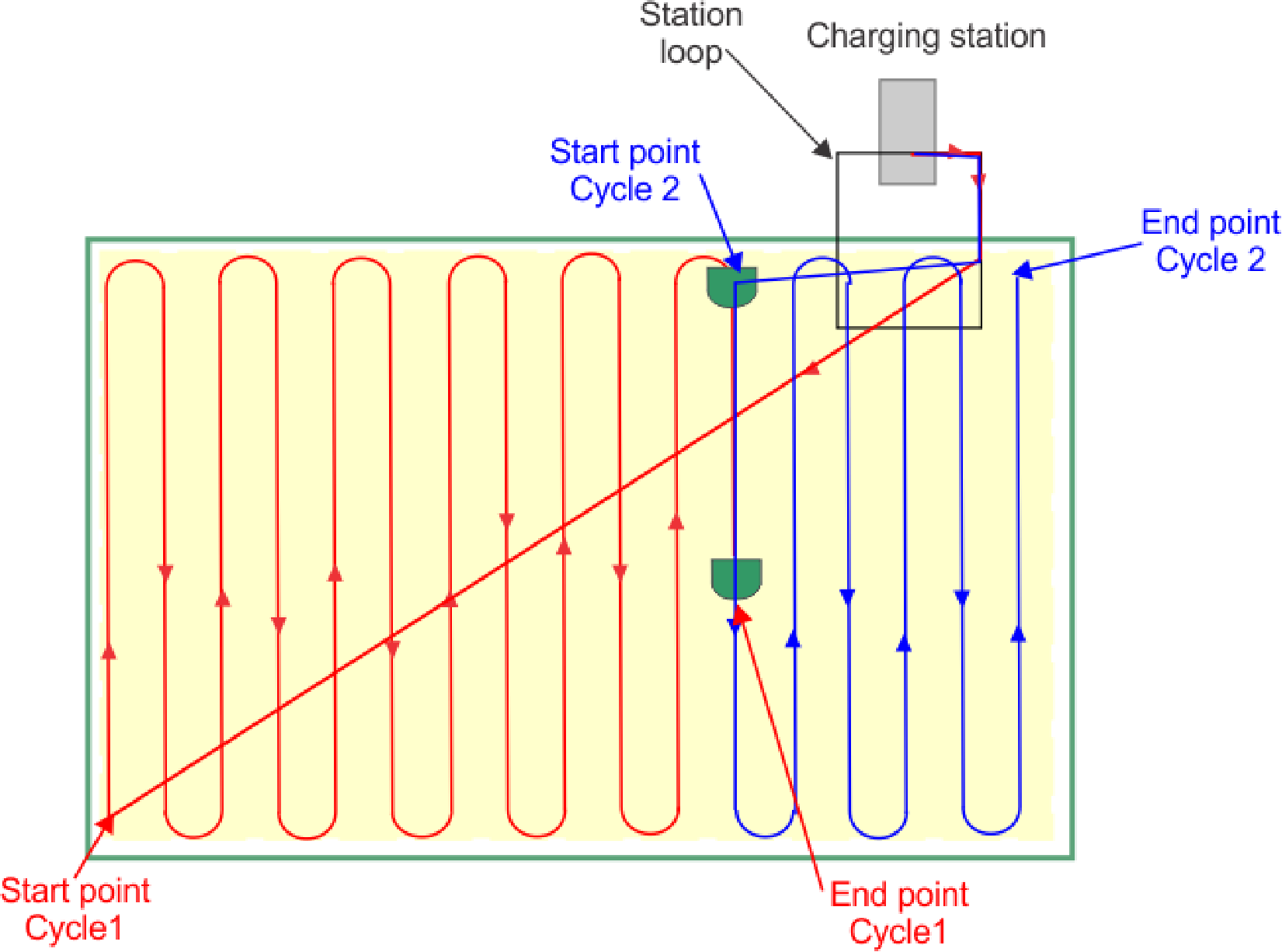
サイクル
サイクルはロボットの作業セッションです。ロボットがステーションを離れるときに開始となり、ステーションに戻るか、作業サイクルを停止する問題が発生したときに終了となります。
エンティティ
サイト内で動作するロボットとユーザーの集合。エンティティ内のロボットに関する情報は、ウエッブポータルで表示できます。
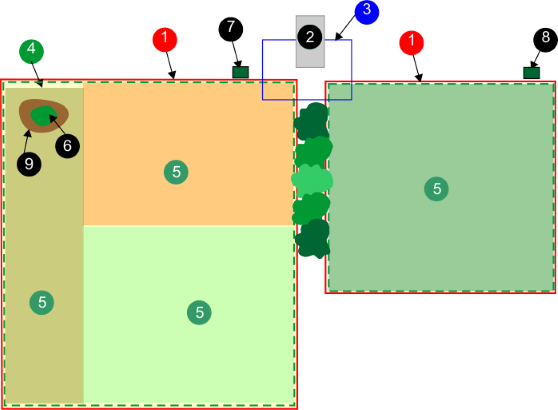
GPSナビゲーションゾーン
これは、境界発見プロセスによって定義されるRTK GPSゾーンです。それは作業領域全体をカバーします。このゾーンをコピーして編集することでサブゾーンを作成し、ロボットの効率を最適化することができます。
GPSポイント
ロボットがステーションに戻ったりステーションから出たりするために使う、区画内の特定の点。ポイントは緯度と経度によって定義されます。ロボットはこの地点まで直接ルートをたどり、その後道路境界とループワイヤーをたどって充電ステーションに戻ります。
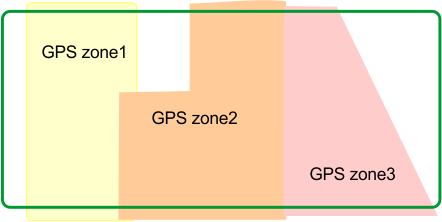
GPSゾーン
GPSゾーンは、GPS座標のセットによって定義されます。これにより、追加のワイヤやチャネルを使うことなく、有線区画を再分割できます。
これにより、ロボットが複数のゾーンにわたって最適な効率で作業するようにスケジュールを設定できるため、作業エリアを定義する際の柔軟性が大幅に向上します。
アイドル状態
[停止] ボタンを使って現在の作業が終了すると、ロボットはアイドルモードに入ります。デフォルトでは、ロボットは15分後にスリープモードに入ります。
アイランド
ロボットがその内部で動作するのを防ぐために特別に取り付けられたペリフェラルワイヤーのループ。ペリフェラルワイヤーは障害物の周りに張られ、アプローチワイヤーとリターンワイヤーは隣り合って敷設されます。
マッピング
GPSデータを使ってロボットによって構成される情報。
立ち入り禁止ゾーン
GPS定義の立ち入り禁止ゾーンは、GPS座標によって定義されたフィールド上の領域であり、ロボットが自律動作状態にある間は決して立ち入ることができません。GPS定義の立ち入り禁止ゾーンは、境界探索中に検出できないゾーンをロボットの作業領域から除外するために使われます。GPS定義の立ち入り禁止ゾーンを使うと、ロボットは最も効率的な芝刈りパターンを事前に計算できます。GPS定義の立ち入り禁止ゾーンは、通常は島や疑似島のような障害物を除外するために使われます。
障害物
ロボットが避けなければならないフィールド内の物体。障害物は永続的なもの(木、家具など)または一時的なもの(動物など)になります。障害物はセンサーによって検知されます。永続的な障害物は、ペリフェラルワイヤとしてループを作成して「アイランド」または「疑似アイランド」を形成することで回避できます。
区画
ペリフェラルワイヤー内の刈り取られる領域。少なくとも1つのパーセルは1つのワイヤに関連付けられます。複数の区画を定義できます。
パーセンテージ
これは、ロボットが特定の区画の作業に費やす時間の割合を表します。区画が1つしかない場合、ロボットは100%の時間をそこに費やします。
ペリフェラルワイヤー
フィールドの表面の下に敷設されたワイヤで、ロボットが作業するエリアを定義します。ペリフェラルワイヤーによって定義される領域を「区画」と呼びます。
擬似アイランド
ペリフェラルワイヤは、アプローチワイヤとリターンワイヤの間に特定の距離を維持しながら障害物の周囲に配置されます。
ロボットのステータス値
- OFF
ロボットの電源がオフになっています。
- アラーム後のオフ
ロボットはアラーム後に自動的に電源オフになりました。
- アラーム
ロボットは警戒状態にあります。
- 待機
ロボットは充電ステーションで待機しています。
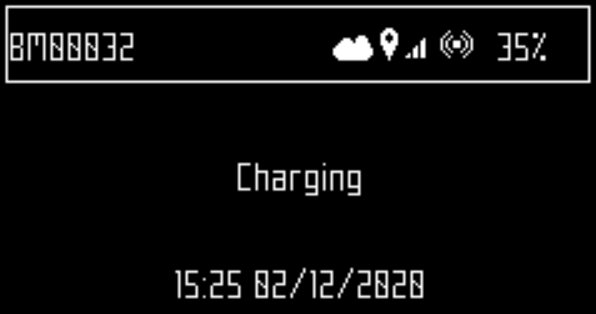
- 充電
ロボットがバッテリーを充電しています。
- アンロードステーションへ向かう
ロボットはボールを降ろすためにドロップピットステーションに行きます。このステータスは、ロボットがステーションに戻ることを決定したときに開始されます。
- 充電ステーションへ向かう
ロボットが充電ステーションに行きます。このステータスは、ロボットが充電ステーションに戻ることを決定したときに開始されます。
- ステーションを出る
ロボットがステーションを出て作業を始めます。
RTK GPSゾーン
パターン刈りを行うロボットの作業エリア。RTK GPSゾーンは、ロボットがペリフェラルワイヤーを周回するエリアとして定義されます。
サイト
ロボットが作業するエリアを含むエリア全体。
スリープ
ロボットは、アラームが鳴って解除されない場合は、15分後にスリープ モードに入ります。スリープモードで2日間経過すると、ロボットはオフモードになります。これは、バッテリの充電レベルが低下した場合にも発生します。スリープモードでは、ロボットはバッテリーのリスクを軽減するために最小限の電力しか使用しません。
ロボットのスリープ モードは次の方法で解除できます:
- LEDスクリーン上のボタンを使ってアラームを解除し、ロボットのスイッチをオンにする。
- バッテリーが切れている場合、ロボットを充電ステーションまで戻す
- ウエッブポータル経由でリモートウェイクアップ
コマンドを送信する
ステーションループ
ステーションループは、充電ステーションの周囲にある短いワイヤで、ロボットをステーションに誘導するために使われます。ロボットはステーションのループ内にいることを検出すると、ステーションに到着するまでワイヤに沿って進みます。
地形
フィールドの周囲を取り囲む、芝刈りしてはいけない草の領域。
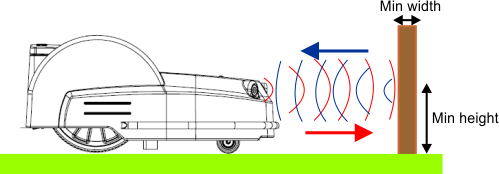
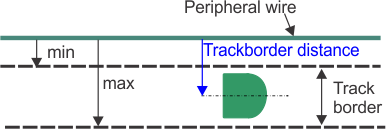
トラック境界
ロボットが作業する、区画の外郭の草の幅。ロボットは、GPSを使用していない場合は、充電ステーションを出発または戻るときにトラック境界を追随します。ワイヤにて指定された「充電ステーションに戻るループ」としてのトラック境界はありません。
トラック境界はペリフェラルワイヤの隣にあり、設置パラメータとして設定された最小寸法と最大寸法によって定義されます。それはロボットよりも幅が広いです。トラック境界内でロボットがたどる経路はランダムに選択されます。これにより、ロボットが同じ経路に沿って繰り返し移動して現場にわだちができることがなくなります。ロボットがトラック境界内で障害物に遭遇すると、センサーがロボットを反転させ、その後、前進するためにランダムな角度で回転させます。必要に応じて、これを何度も繰り返す場合があります。
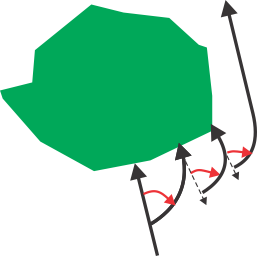
トラック境界内の障害物を回避するための操縦
G520315