Produktübersicht
Produktübersicht Mähroboter der Serie Turf Pro
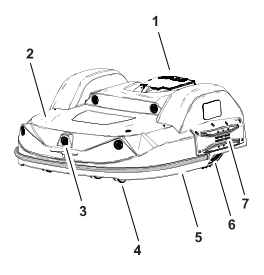
Ansicht von oben
G538206
-
Stopp-Taste
-
Gehäuse
-
Sonarsensoren zur Hinderniserkennung
-
Vorderräder
-
Stoßfänger
-
Hinterräder
-
Ladekontakte
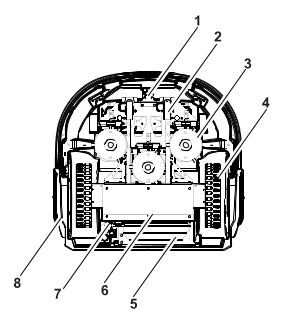
Ansicht von unten(Modell 300)
G538280
-
Spule
-
Vorderräder
-
Mähköpfe
-
Hinterräder
-
Akku
-
Geschlossene Elektronikbox (Smartbox)
-
Netzschalter
-
Ladekontakte
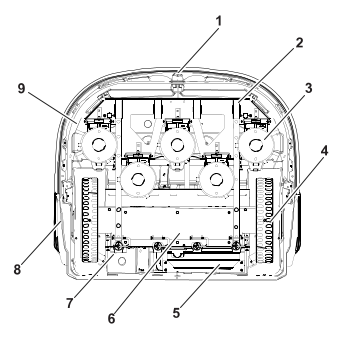
Ansicht von unten(Modell 500)
G529049
-
Spule
-
Vorderräder
-
Mähköpfe
-
Hinterräder
-
Akku
-
Geschlossene Elektronikbox (Smartbox)
-
Netzschalter
-
Ladekontakte
-
Schutzscheibe
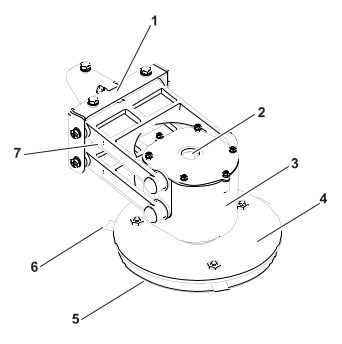
Mähkopf
G526500
-
Halterung
-
Kabeleinführung
-
Motorgehäuse
-
Messerträgerscheibe
-
Antifriktionsscheibe
-
Schnittmesser
-
Stromabnehmer
Hinweis: Die Messerträgerscheibe , die Antifriktionsscheibe
, die Antifriktionsscheibe und die Mähmesser
und die Mähmesser  werden zusammen als „Mähscheibe“ bezeichnet.
werden zusammen als „Mähscheibe“ bezeichnet.
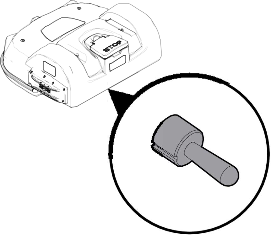
Netzschalter (Modell 300)
|
Der Netzschalter befindet sich
unter der Abdeckung auf der linken Rückseite des Roboters. Schieben Sie den Netzschalter
nach rechts in die ON-Stellung,
um den Roboter in Betrieb zu nehmen.
Schalten Sie
den Netzschalter bei längerem Nichtgebrauch oder im Winter nach
links in die OFF-Stellung. |
Netzschalter (Modell 500)
 |
Der Netzschalter befindet sich
unter der Abdeckung auf der rechten Rückseite des Roboters. Schieben Sie den Netzschalter
nach oben in die ON-Stellung,
um den Roboter in Betrieb zu nehmen.
Stellen Sie
den Netzschalter bei längerem Nichtgebrauch oder im Winter nach
unten in die OFF-Stellung. |
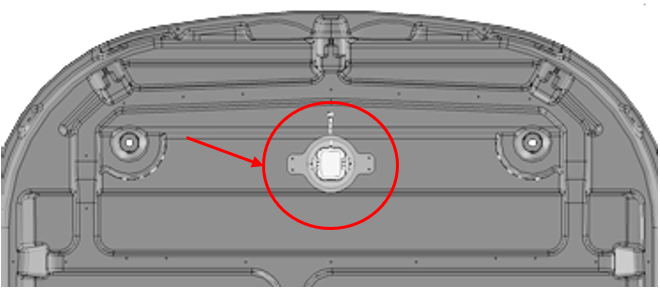
RTK-GPS-Antenne
G519918
Dies ist eine spezielle GNSS-Antenne,
die in der Mitte der Vorderseite des Gehäuses installiert ist.
Sie wird verwendet, um Daten über die
globale Position des Roboters von Satelliten zu empfangen.
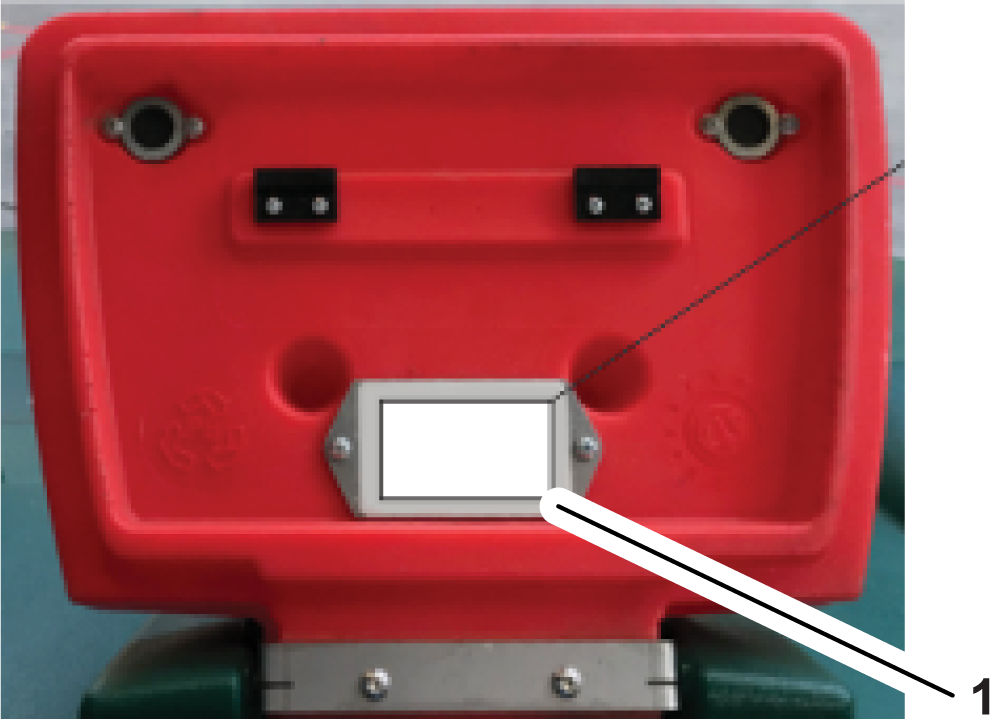
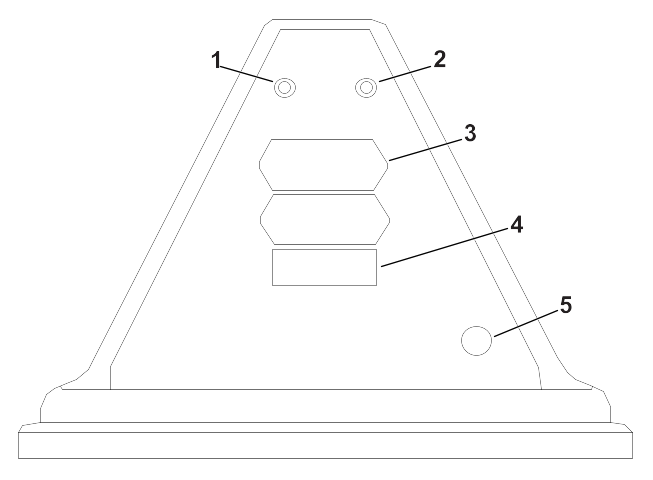
Typenschild
Das Typenschild
befindet sich auf der Innenseite des Deckels der Stopp-Taste, wie
unten dargestellt.
G541779
-
Typenschild
Sensor-Übersicht
Die Maschine ist mit einer
umfassenden Anzahl von Sensoren ausgestattet, die einen sicheren Betrieb
gewährleisten. Diese Sensoren sorgen
dafür, dass der Roboter Hindernisse in seinem Weg erkennen und
umgehen kann.
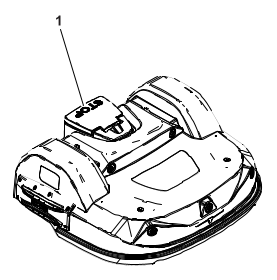
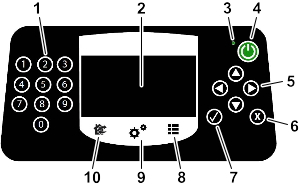
Stopp-Taste
Die Stopp-Taste  befindet sich gut sichtbar auf
der Oberseite des Roboters. Wenn Sie diese Taste drücken, stoppt
der Roboter seine Bewegung und die Mähmesser.
Die Stopp-Taste dient auch als Deckel, der, wenn er angehoben wird,
Zugang zur Anzeige der Benutzeroberfläche
des Roboters gewährt. Um den Roboter neu zu starten,
muss ein Befehl über diese Benutzeroberfläche gegeben werden.
befindet sich gut sichtbar auf
der Oberseite des Roboters. Wenn Sie diese Taste drücken, stoppt
der Roboter seine Bewegung und die Mähmesser.
Die Stopp-Taste dient auch als Deckel, der, wenn er angehoben wird,
Zugang zur Anzeige der Benutzeroberfläche
des Roboters gewährt. Um den Roboter neu zu starten,
muss ein Befehl über diese Benutzeroberfläche gegeben werden. Sonarsensoren zur Hinderniserkennung
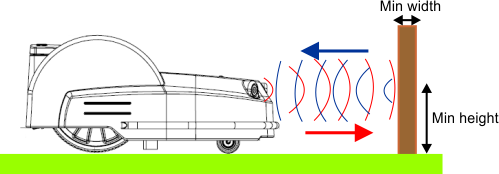
Der Roboter ist mit einer Reihe
von Sonarsensoren ausgestattet, um Hindernisse zu erkennen. Der Roboter
verringert seine Geschwindigkeit, wenn
die Sonarsensoren ein Hindernis erkennen.
Erkennen von Hindernissen durch
Sonarsensoren
G525070
Wenn sich der Roboter stets
mit einer langsamen Geschwindigkeit bewegt, auch wenn keine Hindernisse
in Sicht sind, deutet dies auf ein Problem
mit den Sensoren hin. In diesem Fall sollten Sie sich an den Kundendienst
wenden, der Ihnen bei der Analyse des Problems
hilft.
Stoßfänger
Der Stoßfänger ist ein
Drucksensor, der erkennt, wenn der Roboter ein Hindernis berührt.
Wenn der Stoßfänger das Hindernis
berührt, bewegt sich der Roboter rückwärts und
dreht sich dann um einen Winkel, bis er das Hindernis umgehen kann.
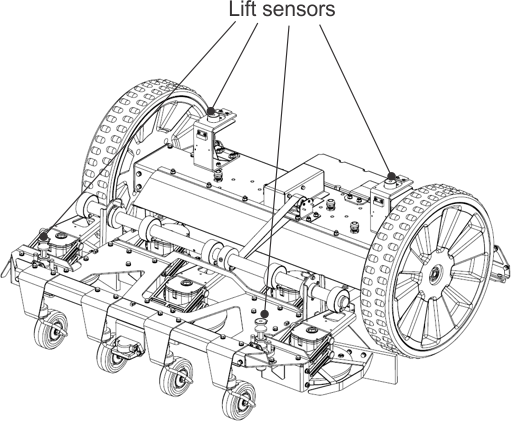
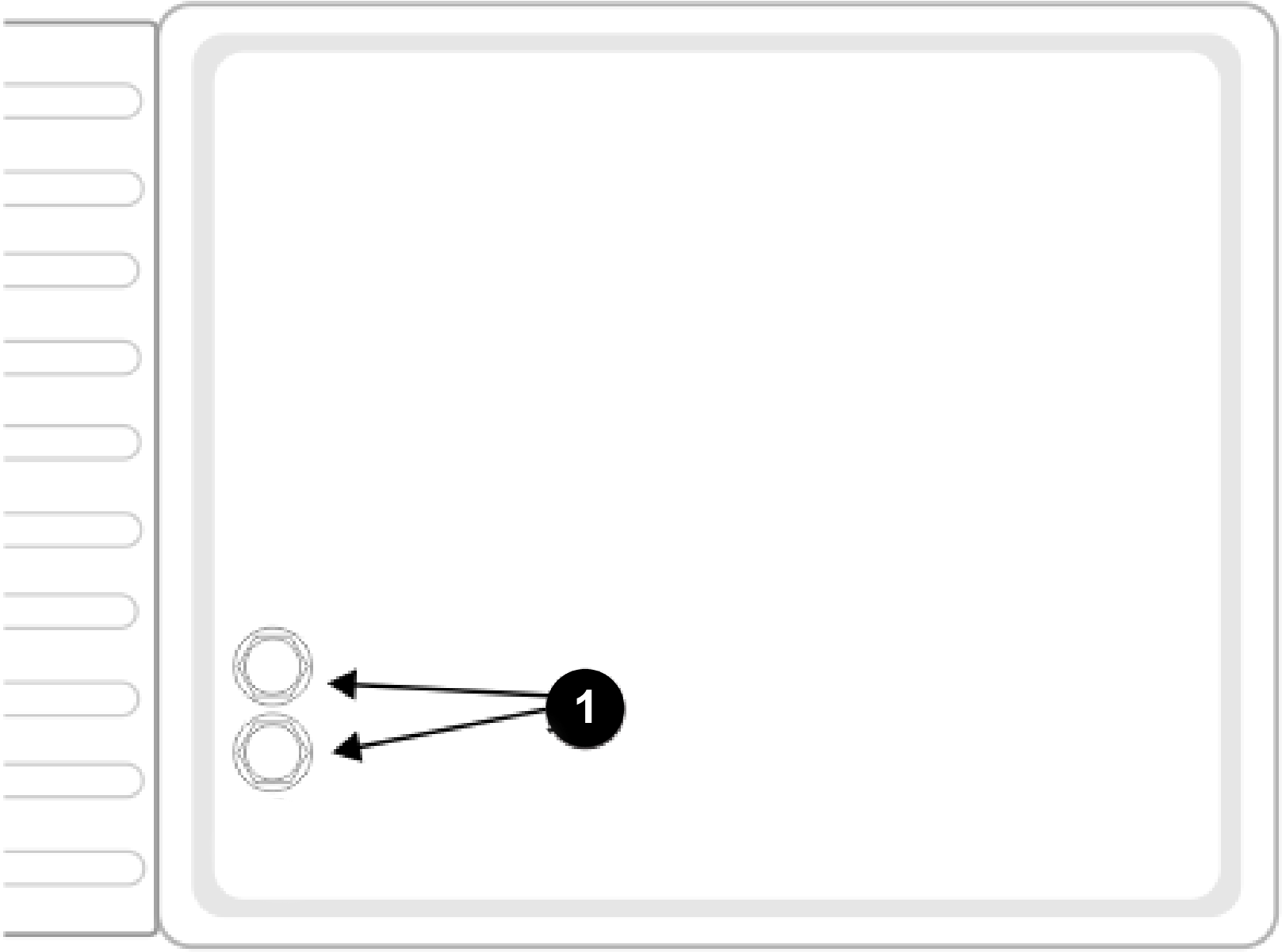
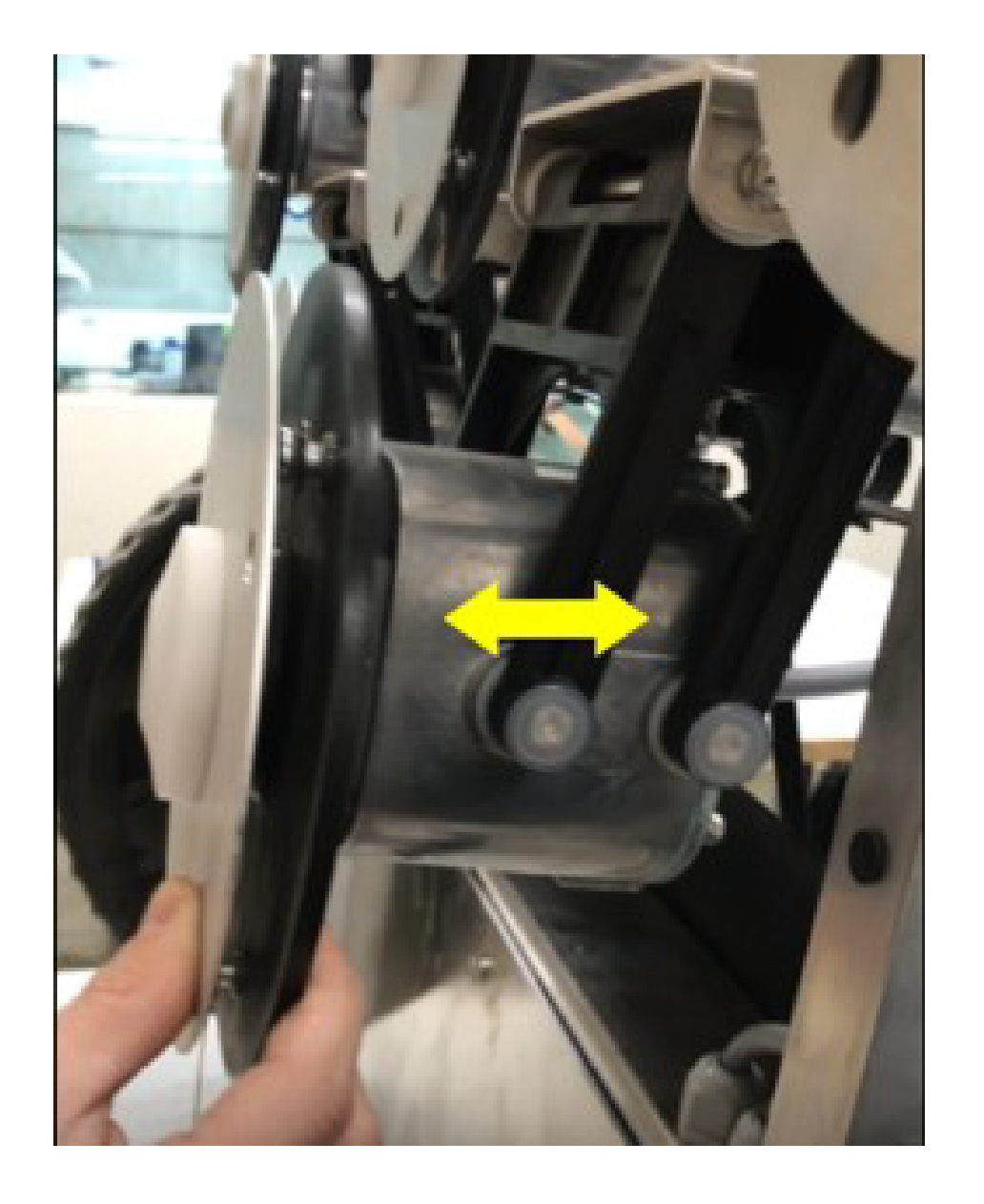
Wegsensoren für Anheben des Gehäuses
Lage der angebauten Anhebesensoren
G538312
-
Angebaute Hebesensoren
Anhebesensoren (Abbildung zeigt
Serie 500)
G525072
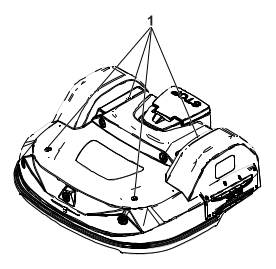
Die Anhebesensoren sind
an 4 Punkten am Gehäuse des Roboters angebracht. Wenn der
Roboter einen niedrigen Gegenstand berührt,
der die Karosserie nach oben drückt, oder wenn jemand
versucht, die Karosserie anzuheben, reagieren die Anhebesensoren.
Der Roboter hört auf zu mähen
und fährt rückwärts. Wenn diese Bewegung das Hindernis
vom Körper löst, führt der Roboter ein Ausweichmanöver
durch, um das Objekt zu umgehen und mit
dem Mähen fortzufahren. Ist dies nicht der Fall, gibt der Roboter
nach 10 Sekunden einen Alarm aus und
bleibt im sicheren Modus (stationär), bis das Hindernis beseitigt
ist.
Spule
Die
Induktionsspule erfasst die Stärke des Magnetfelds, das im Peripheriekabel
erzeugt wird. Die maximale Intensität befindet
sich direkt über dem Kabel, das den Roboter dazu
veranlasst, anzuhalten, zu wenden und dann in eine neue Richtung weiterzumähen.
Neigungssensor
Der Neigungssensor erfasst den
Winkel des Hanges, auf dem der Roboter arbeitet. Wird der Winkel überschritten,
wird ein Alarm ausgelöst und der Roboter
hält an.
Überschlagsensor
Der Überschlagsensor erkennt,
ob der Roboter auf den Kopf gekippt ist oder ob jemand versucht, den
Motor zu starten, wenn der Roboter auf
dem Kopf steht.
Temperatursensor
Der Temperatursensor misst die
Umgebungstemperatur und verhindert den Betrieb des Roboters, wenn
diese Umgebungstemperatur zu niedrig ist.
Die Mindesttemperatur, bei der der Roboter arbeiten kann, wird als
Betriebsparameter festgelegt.
RTK-GPS-Empfänger
Dieser Sensor erfasst Daten von
Satelliten, um die genaue globale Position des Roboters zu bestimmen.
Anbaugeräte/Zubehör
Ein Sortiment an Toro Originalanbaugeräten
und -zubehör wird für diese Maschine angeboten, um die Einsatzmöglichkeiten
des Geräts zu vergrößern und zu
verbessern. Wenden Sie sich an Ihren offiziellen Toro-Vertragshändler oder navigieren
Sie auf www.Toro.com für eine Liste der
zugelassenen Anbaugeräte und des Zubehörs.
Verwenden Sie
nur Originalersatzteile und -zubehörteile von Toro, um die optimale Leistung
und eine dauerhafte sicherheitsrelevante Funktion der Maschine zu
gewährleisten.
Übersicht Ladestationen
Hinweis: Abbildung zeigt Modell 30914EU. Das Aussehen kann je nach Modell
leicht abweichen. Weitere Informationen finden Sie in der
Anleitung zum Aufladen.
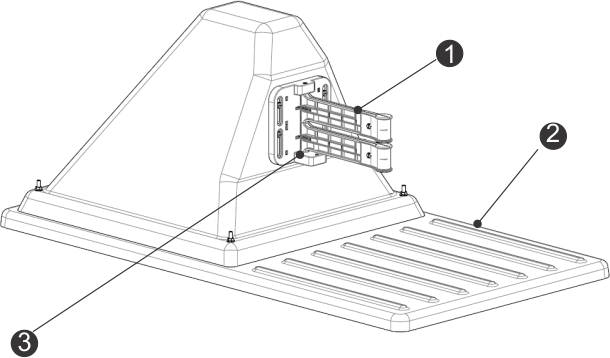
Komponenten der Ladestation
G520730
- Ladearme
- Basis
- Belegungssensor
Rückansicht der Ladestation
G537669
- Za LED-Anzeige
- ZL LED-Anzeige
- Typenschild
- Aufkleber
- Eingang
Netzkabel
Bodenansicht der Ladestation
G538193
- Eingang
Peripheriekabel
LED-Leuchten
Die LED-Leuchten zeigen den aktuellen
Zustand der einzelnen Kabel an. Siehe dazu die folgende Tabelle.
| Grün - blinkend |
Das Kabel funktioniert normal. |
| Rot - blinkend
|
Es kann kein Peripheriekabel erkannt
werden. Das Kabel wurde möglicherweise durchtrennt oder ist zu
lang. |
| Rot - Dauerlicht
|
Dies weist auf ein Problem hin.
Das Kabel ist möglicherweise zu kurz (weniger als 200 m)
oder es liegt ein Problem mit der
Elektronik vor. |
Die LEDs sind wie folgt beschriftet:
- ZL: Das Kabel für die Ladestationsschleife
- Za: Das Kabel für die Arbeitszone
A
- Zb: Das Kabel für die Arbeitszone
B
Hinweis: Wenn Sie eine Ladestation mit mehreren Schleifen verwenden und eine
der Schleifen nicht benutzt wird, blinkt die LED rot.
Stellen Sie den Kanal auf der Platine auf 9, um
das blinken der roten LED zu beenden.
Technische Angaben
Hinweis: Technische und konstruktive Änderungen vorbehalten.
Kapazität
| Maximaler Arbeitsbereich [m2]
|
75.000 m2 |
75.000 m2 |
45.000 m2 |
| Empfohlener Arbeitsbereich [m2]
|
55.000 m2 |
55.000 m2 |
35.000 m2 |
| Schnittbreite [mm] |
1033 mm
|
1033 mm
|
633 mm
|
| Arbeitsgeschwindigkeit [km/h] |
3,6 km/h
|
3,6 km/h
|
2,8 km/h
|
| Maximale Neigung [%] |
45 % (24°) |
30 % (17°) |
35 % (19,5°) |
Mähen
| Anzahl der Mähköpfe |
5
|
3
|
| Anzahl der Mähmesser |
15
|
9
|
| Minimale Schnitthöhe (Standardmähscheibe
/ Scheibe mit geringer Höhe)
|
20 mm / 15 mm |
20 mm / 15 mm |
| Maximale Schnitthöhe (Standardmähscheibe
/ Scheibe mit geringer Höhe)
|
100 mm / 90 mm |
100 mm / 90 mm |
| Einstellung der Mähköpfe |
Elektronisch
|
Elektronisch
|
| Maximaler Geräuschpegel (gemessen
in 5 m Entfernung) |
52 dB(A)
|
52 dB(A)
|
Akku
| Typ
|
LiFePO4
|
LiFePO4
|
| Nennspannung [V]
|
25,6 V
|
25,6 V
|
| Nennkapazität [Ah] |
19,0 Ah
|
19,0 Ah
|
| Leistung [Wh]
|
486,4 Wh
|
486,4 Wh
|
| Arbeitstemperaturbereich |
-5°C bis +60°C |
-5°C bis +60°C |
| Durchschnittliche Mähzeit
[min] |
110
|
280
|
| Durchschnittliche Zeit bis zum
vollständigen Aufladen [min]
|
90
|
90
|
Gewicht und Abmessungen
| Gewicht [kg]
|
71 kg
|
52 kg (114,6 lb)
|
| Länge [mm]
|
1.110 mm
|
1.002 mm
|
| Breite [mm]
|
1.278 mm
|
1.044 mm
|
| Höhe [mm]
|
515 mm
|
466 mm
|
Software und Überwachung
| Sicherheits-PIN-Code |
Ja
|
Ja
|
| GPS-Standort
|
RTK
|
RTK
|
| Robotermanagement über Server
und App. |
Standardmäßig im Lieferumfang
enthalten |
Standardmäßig im Lieferumfang
enthalten |
Erfassung
| Erkennung von Hindernissen mittels
Sonar |
Mehrere
|
Mehrere
|
| Rückkehr zur Ladestation
per GPS |
Ja
|
Ja
|
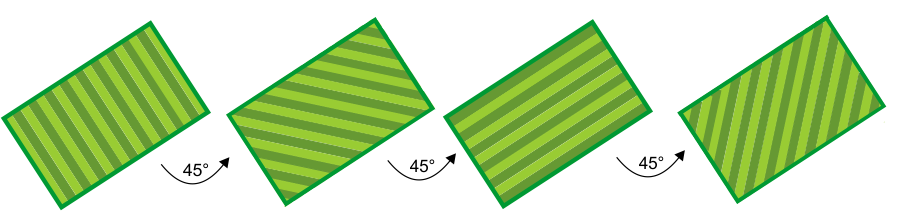
| Mähart
|
Muster
|
Muster
|
| Mehrere Startzonen |
Ja
|
Ja
|
| Mehrere Felder (optional) |
Ja
|
Ja
|
| Mehrere Roboter/Ladestationen |
Nein
|
Nein
|
| Sonar zur Hinderniserkennung |
5
|
5
|
| Widerstandsfähiger Stoßfänger
für Kollisionen |
1
|
1
|
| Vordere Hubsensoren |
2
|
2
|
| Hintere Hubsensoren |
2
|
2
|
| Heckkollisionssensoren |
2
|
2
|
| Überroll-/Neigungssensoren |
1
|
1
|
| Mähkopf-Ablenkbleche |
2 (ein an jedem äußeren
Mähkopf) |
Keine
|
Glossar
Grenzmodus
Wenn der Roboter das Gras
am Rande des Rasenbereichs mäht. Dies wird mehrmals pro Woche
durchgeführt.
Zyklus
Ein Zyklus ist ein Arbeitseinsatz
des Roboters. Dieser beginnt, wenn der Roboter die Station verlässt
und endet, wenn er zur Station zurückkehrt
oder ein Problem auftritt, das den Arbeitszyklus unterbricht.
Verbund
Eine Sammlung von Robotern
und Nutzern, die innerhalb eines Standorts arbeiten. Informationen
zu den Robotern in einem Verbund können im
Webportal eingesehen werden.
GPS-Navigationszone
Hierbei handelt
es sich um eine RTK-GPS-Zone, die durch den Grenzerkennungsprozess
definiert wird. Diese umfasst den gesamten Arbeitsbereich.
Durch Kopieren und Bearbeiten dieser Zone können dann Unterzonen
erstellt werden, um die Effizienz des Roboters zu
optimieren.
GPS-Punkt
Ein bestimmter Punkt innerhalb
einer Parzelle, den der Roboter nutzt, um zu einer Station zurückzukehren
oder diese zu verlassen. Dieser Punkt wird durch
seinen Breitengrad und Längengrad definiert. Der Roboter nimmt
einen direkten Weg zu diesem Punkt und folgt dann
der Spurgrenze und dem Schleifenkabel, um zur Station zurückzukehren.
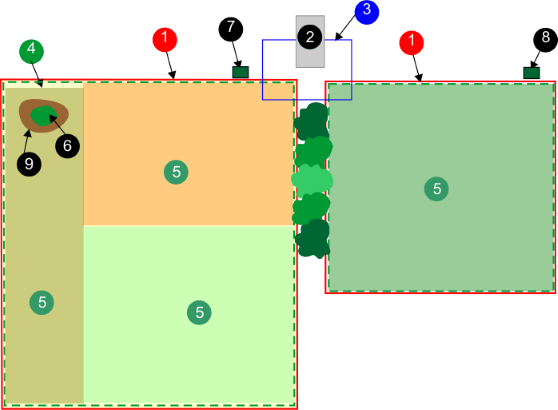
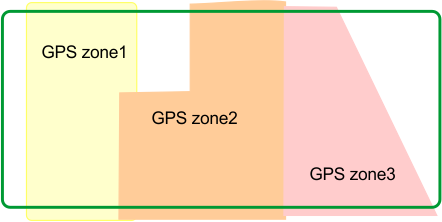
GPS-Zone
Eine GPS-Zone wird durch
eine Reihe von GPS-Koordinaten definiert. Es ermöglicht die Unterteilung
der verkabelten Parzelle, ohne dass zusätzliche
Kabel und Kanäle verwendet werden müssen.
GPS-Zonen in einer verkabelten
Parzelle
G520046
Dies ermöglicht eine größere
Flexibilität bei der Definition von Arbeitsbereichen, da der
Roboter so eingeplant werden kann, dass er in den
Zonen mit optimaler Effizienz arbeitet.
Leerlauf
Ein Roboter geht in den
Ruhezustand über, wenn der aktuelle Auftrag mit der Stopp-Taste
beendet wurde. Standardmäßig wechselt
der Roboter nach 15 Minuten in den Schlafmodus.
Insel
Eine Schleife im Peripheriekabel,
die speziell verlegt wurde, um die der Roboter herum arbeitet. Das
Peripheriekabel wird um das Hindernis herum verlegt
und das Anfahr- und Rückfahrkabel nebeneinander verlegt.
Karte
Karte der Roboterrouten
auf dem Portal.
Kartierung
Die Informationen, die
der Roboter mit Hilfe von GPS-Daten erstellt.
No-Go-Zone
GPS-definierte No-Go-Zonen
sind durch GPS-Koordinaten definierte Bereiche auf dem Feld, die der
Roboter in keinem seiner autonomen Betriebszustände
befahren darf. Durch GPS-definierte No-Go-Zonen werden verwendet,
um Zonen aus dem Arbeitsbereich des Roboters auszuschließen,
die bei der Grenzerkennung nicht erfasst werden können. Durch
die Verwendung von GPS-definierten No-Go-Zonen kann
der Roboter das effizienteste Mähmuster im Voraus berechnen.
GPS-definierte No-Go-Zonen werden verwendet, um Hindernisse
auszuschließen, was in der Regel durch Inseln und
Pseudo-Inseln geschieht.
Hindernis
Ein Objekt im Feld, dem
der Roboter ausweichen muss. Hindernisse können dauerhaft (z.
B. Bäume, Möbel) oder vorübergehend
(z. B. Tiere) sein. Hindernisse werden von den Sensoren erkannt.
Ständige Hindernisse können vermieden werden, indem man
Schleifen mit dem Peripheriekabel legt, um "Inseln"
oder "Pseudo-Inseln" zu bilden.
Parzelle
Ein zu mähender Bereich
innerhalb eines verlegten Peripheriekabels. Mindestens eine Parzelle
ist mit einem Kabel verbunden. Es können mehrere
Parzellen definiert werden.
Prozentsatz
Dies ist der Anteil der
Zeit, den der Roboter mit der Bearbeitung einer bestimmten Parzelle
verbringt. Wenn es nur eine Parzelle gibt, verbringt
der Roboter 100 % seiner Zeit dort.
Peripheriekabel
Ein unter der
Oberfläche des Feldes verlegtes Kabel, das den Arbeitsbereich
des Roboters abgrenzt. Der durch den Peripheriekabel
definierte Bereich wird als „Parzelle“ bezeichnet.
Pseudo-Insel
Das Peripheriekabel wird
um das Hindernis herumgeführt, wobei ein bestimmter Abstand zwischen
dem Anfahr- und Rückfahrkabel eingehalten wird.
Roboter-Statuswerte
- Aus
Der Roboter ist ausgeschaltet.
- Aus nach Alarm
Der Roboter hat sich nach einem
Alarm abgeschaltet.
- Alarm
Der Roboter befindet sich in einem
Alarmzustand.
- Wartet
Der Roboter wartet an einer Ladestation.
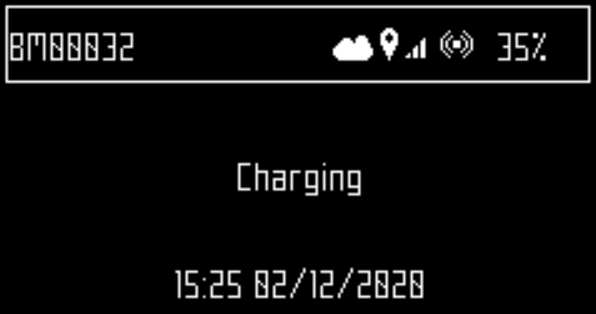
- Laden
Der Roboter lädt den Akku
auf.
- Auf dem Weg zur Entladestation
Der Roboter fährt zur Entladestation,
um Bälle abzuladen. Dieser Status wird aktiv, wenn der Roboter
beschließt, zur Station zurückzukehren.
- Auf dem Weg zur Ladestation
Der Roboter fährt zur Ladestation.
Dieser Status wird aktiv, wenn der Roboter beschließt, zur Station
zurückzukehren.
- Verlassen der Ladestation
Der Roboter verlässt die
Ladestation und nimmt seine Arbeit auf.
RTK-GPS-Zone
Der Arbeitsbereich eines
Roboters, der ein Mähmuster erstellt. Die RTK-GPS-Zone wird dadurch
definiert, dass der Roboter den Bereich um das Peripheriekabel
abfährt.
Standort
Der gesamte Bereich, der
den Bereich umfasst, in dem der Roboter arbeitet.
Ruhezustand
Ein Roboter geht 15 Minuten
nach Auftreten eines Alarms, der nicht quittiert wurde, in den Ruhezustand
über. Nach 2 Tagen im Ruhezustand schaltet
der Roboter ab (OFF-Modus). Dies tritt auch ein, wenn der Ladezustand
des Akkus einen niedrigen Wert erreicht. Im Ruhezustand
verbraucht der Roboter so wenig Strom wie möglich, um das Entladen
des Akkus zu verringern.
Der Roboter kann aus dem Ruhezustand
geholt werden durch:
- Quittieren des Alarms und Einschalten
des Roboters mit der Taste auf dem LED-Bildschirm
- Verschieben des Roboters zur Ladestation,
wenn der Akku leer ist
- Senden eines Aufwachbefehls über
das Webportal
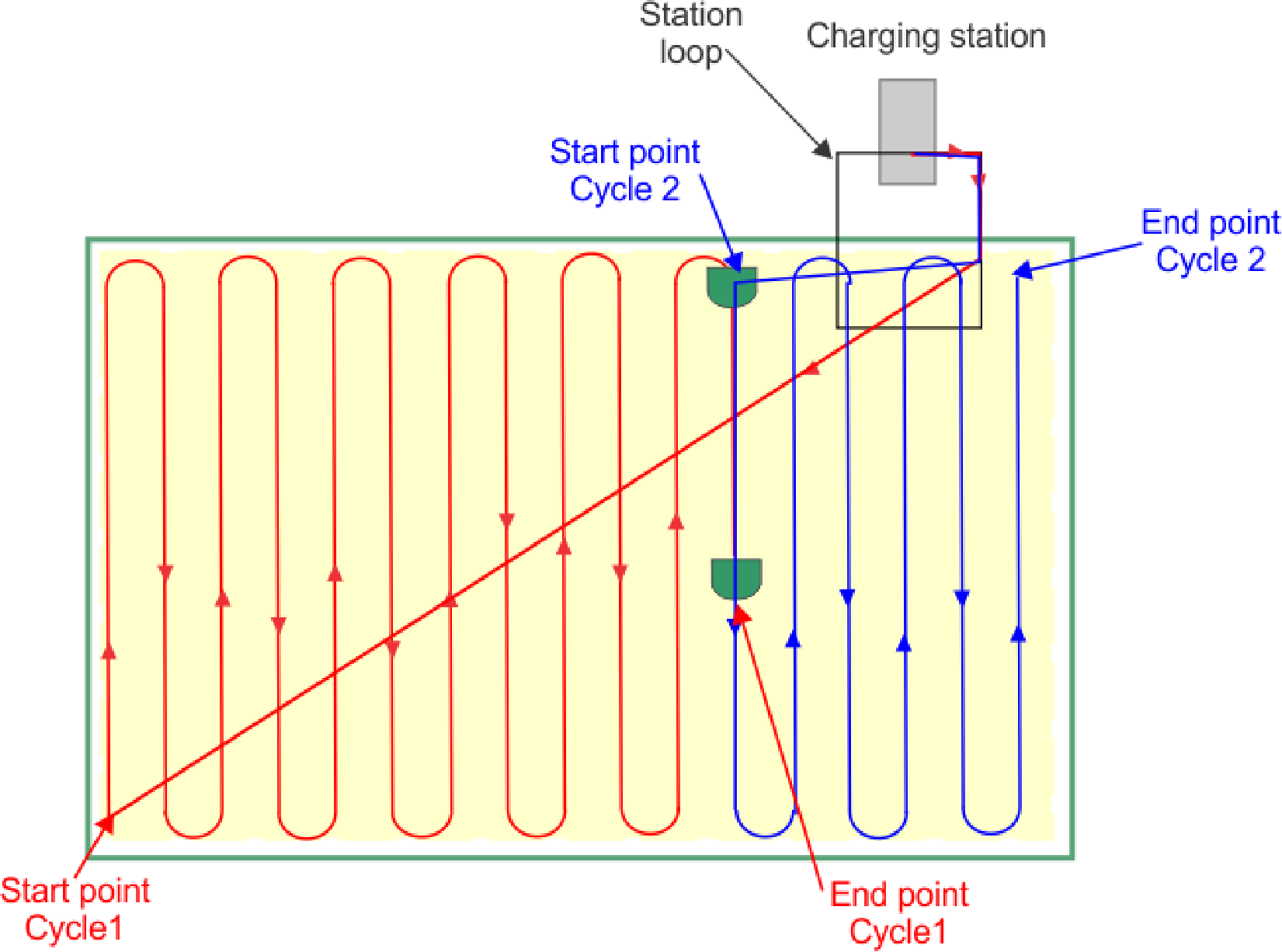
Ladestationsschleife
Eine Ladestationsschleife
ist ein kurzes Kabel um eine Ladestation, das dazu dient, den Roboter
zur Station zu leiten. Wenn der Roboter erkennt,
dass er sich auf der Schleife der Ladestation befindet, folgt er dem
Kabel, bis er in der Ladestation ankommt.
Gelände
Eine Grasfläche, die
das Feld umgibt und nicht gemäht werden darf.
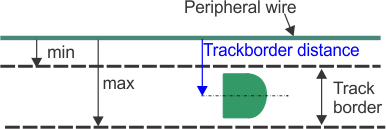
Streckengrenze
Eine Breite
der Grasfläche am Rand der Parzelle, in der der Roboter arbeitet.
Der Roboter folgt der Streckengrenze, wenn er eine
Station verlässt oder zu ihr zurückkehrt, es sei denn, er
verwendet GPS. Für eine Leitung, die als "Rückholschleife"
dient, ist keine Streckengrenze angegeben.
Die Streckengrenze liegt neben
dem Peripheriekabel und wird durch Mindest- und Höchstmaße
definiert, die als Installationsparameter festgelegt
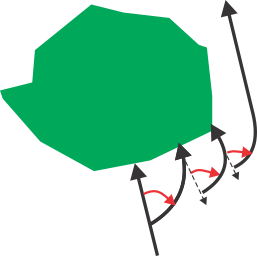
werden. Diese ist breiter als der Roboter. Der Weg, den der Roboter
innerhalb der Streckengrenze nimmt, wird nach dem
Zufallsprinzip ausgewählt. Dadurch wird sichergestellt, dass
der Roboter nicht immer wieder die gleiche Strecke abfährt
und dadurch Spurrillen im Feld entstehen. Wenn der
Roboter auf ein Hindernis stößt, während er sich am
Rand der Streckengrenze befindet, veranlassen die
Sensoren ihn dazu, umzukehren und sich dann um einen zufälligen
Winkel zu drehen, um weiterzufahren. Dies kann bei
Bedarf mehrmals wiederholt werden.
Manöver zum Ausweichen eines
Hindernisses innerhalb der Streckengrenze
G520315