Oversikt over produktet
Oversikt over RTK GPS
- Standard GPS-posisjonsdata hentet
fra satellitter ved hjelp av GNSS (Global Navigation Satellite System)
er nøyaktig mellom 5 m og 10 m.
Dette skyldes at signalet mottatt fra en satellitt er forvrengt på
grunn av atmosfæriske og miljømessige forhold.
Posisjonering med høyere presisjon kan oppnås
ved å bruke en RTK-teknikk (sanntids-kinematikk).
- Denne teknikken innebærer bruk av en RTK-base plassert i en
fast posisjon, som mottar GNSS-signaler fra satellitter. Siden
basen er fastmontert, er dataene den mottar relatert
til den nøyaktige plasseringen.
- Robotene er også utstyrt
med antenner, som mottar GNSS-signaler fra satellitter for å
bestemme posisjonen. Både RTK-basen
og robotene mottar GNSS-signalene fra satellitter i ulike konstellasjoner
(GPS, GLONASS, Galileo, BeiDou). Siden robotene
beveger seg, er evalueringen av deres posisjon mindre presis
enn den faste basen.
- RTK-basen beregner korreksjonsdata for hver av satellittene og sender
disse til roboten. Roboten kan da bruke disse korreksjonene
til å oppnå en posisjonsnøyaktighet
på mellom 2 cm og 3 cm. Med en slik nøyaktig posisjonering
er roboten i stand til å følge et
definert mønster og dekke feltet i en rekke rette linjer.
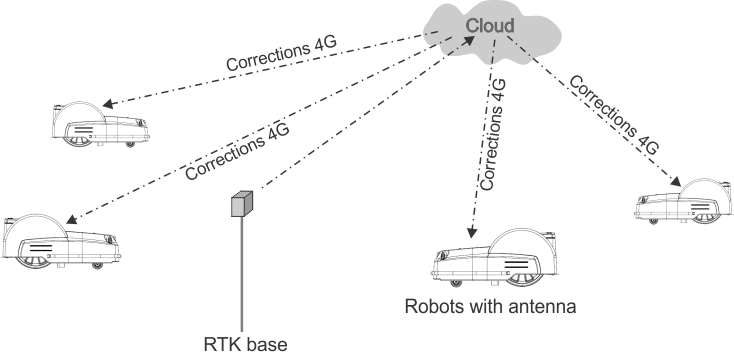
Korrigeringer
kan også gjøres via skyen ved hjelp av 4G. I dette
tilfellet hindrer hindringer ikke overføring av korrigerende
data, og basen kan koble til et ubegrenset antall
roboter på avstander på opptil 15 km.
Overføring av korreksjoner
ved bruk av 4G
G520851
Én basestasjon kan mate korreksjoner
til flere roboter, men hver robot må motta korreksjoner fra bare
én basestasjon for å holde korrigeringene
konsistente.
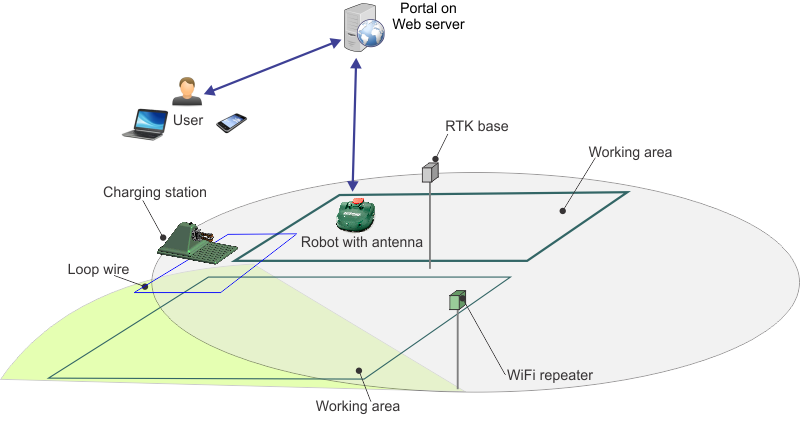
Grunnleggende komponenter i RTK
GPS-klippesystemet
G520852
Dette emnet beskriver robotens
mekaniske egenskaper.
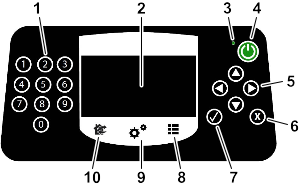
En bruker kan utøve direkte
kontroll over roboten ved hjelp av brukergrensesnittet. Når en
robot er registrert på portalen som kjører
på en nettserver:
- Roboten kan sende informasjon
til denne serveren som kan ses av brukeren.
- Brukeren kan gi kommandoer til
roboten, vurdere ytelsen og justere konfigurasjonen.
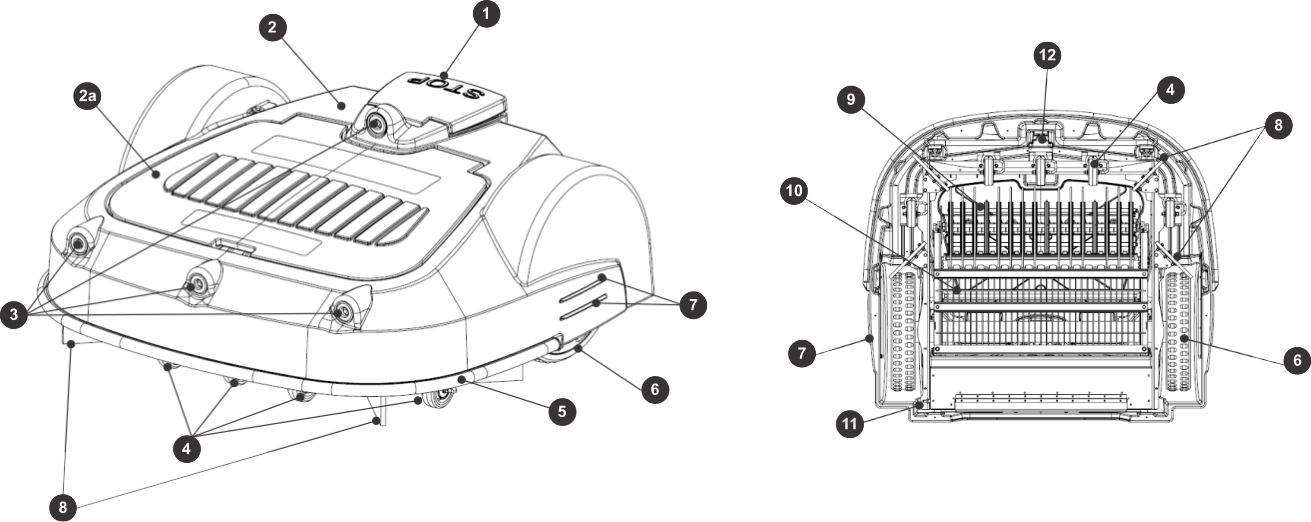
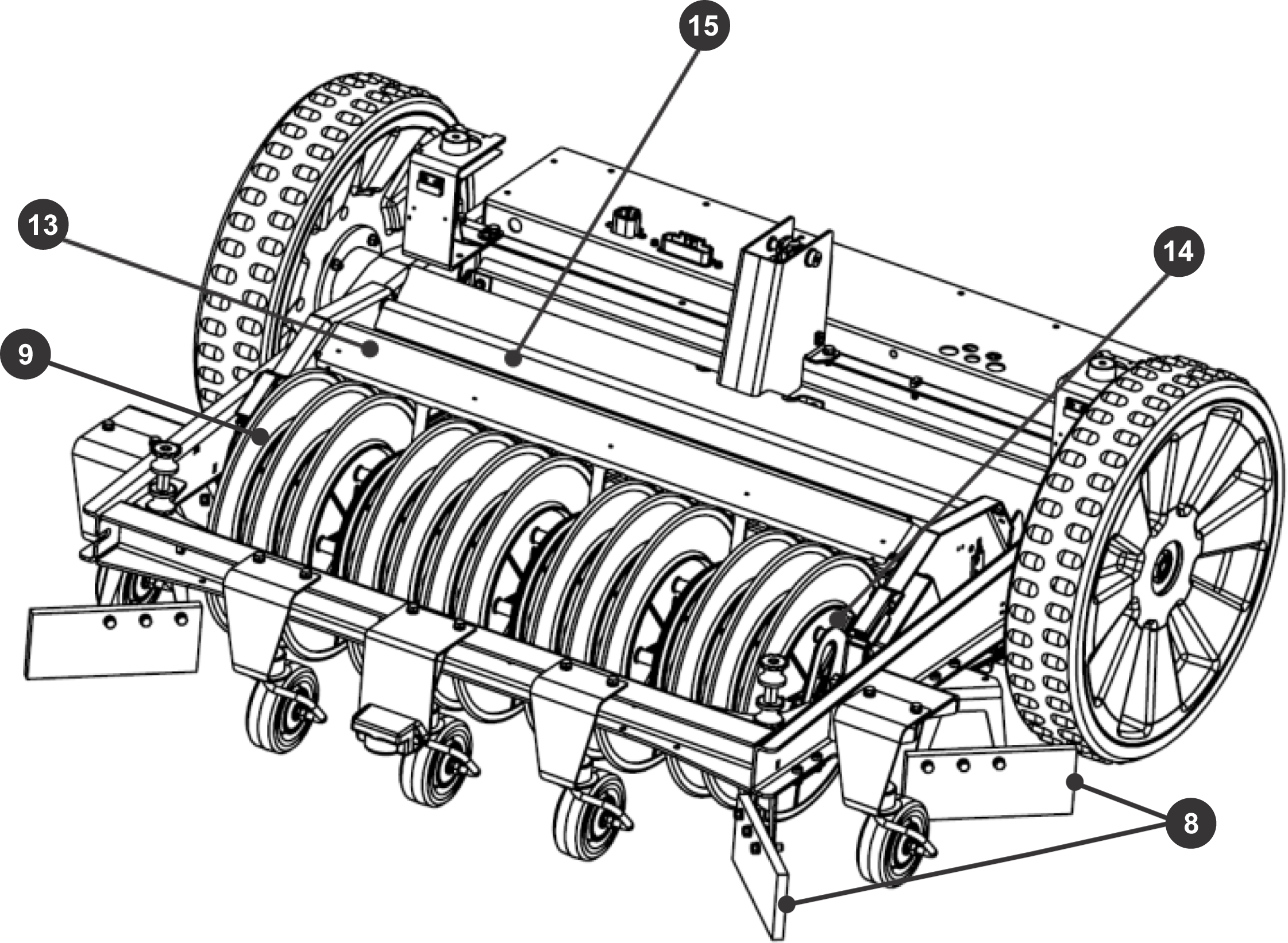
Range Pro 100 oversikt over produktet
Vist ovenfra
G537619
G536774
-
Stopp-knapp
-
Maskinkropp
2a: Kurvlokk
-
Sonarsignal som oppdager hindringer
-
Forhjulene
-
Støtfanger
-
Bakhjul
-
Ladekontakter
-
Ballavledere
-
Oppsamlingsvalse
-
Oppsamlingskurv
-
Strømbryter
-
Spole
-
Balltellingsbånd
-
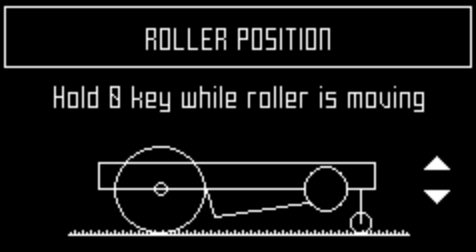
Detektor for rotasjonshastighet
-
Full kurv-detektor
Strømbryter
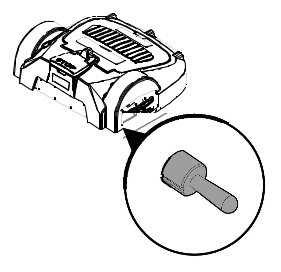 |
Strømbryteren er plassert
under dekselet på høyre bakside av roboten. Skyv strømbryteren mot fremsiden
av maskinen (til PÅ-stillingen)
for å sette roboten i drift.
Skyv strømbryteren
mot bakenden av maskinen (til AV-stillingen) for lengre nedetid
eller vinterlagring. |
RTK GPS-antenne
G536775
Dette er en spesifikk GNSS-antenne
installert midt foran på skallet. Den brukes til å motta
data om robotens globale posisjon fra satellitter.
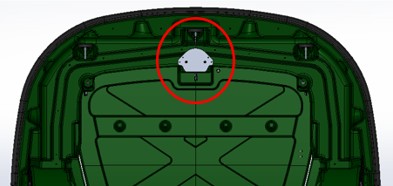
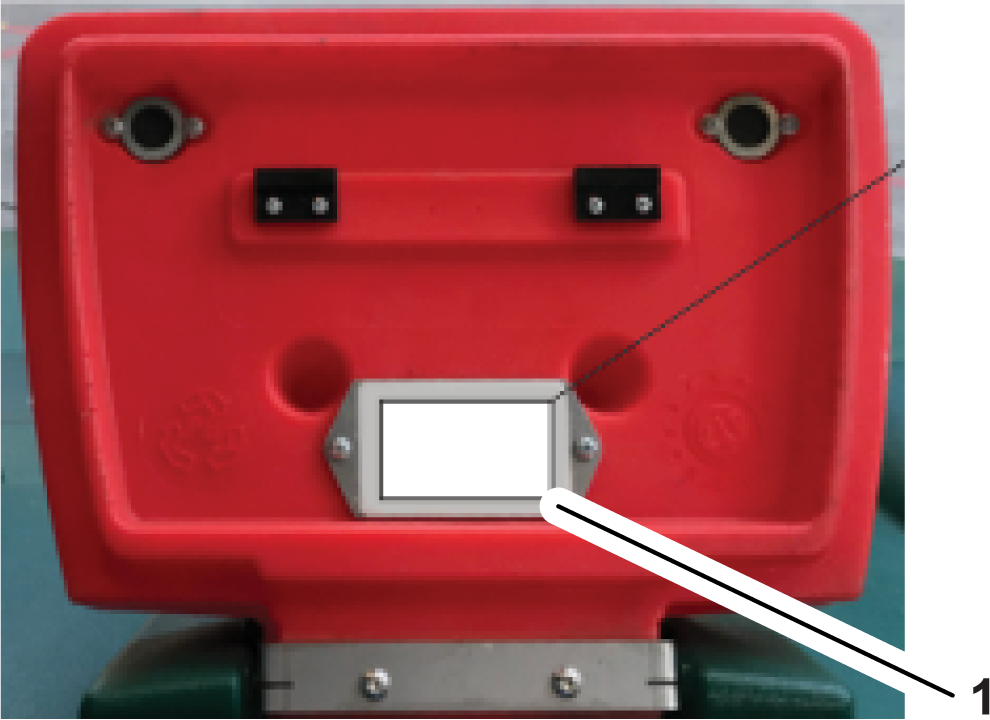
Seriemerke
Identifikasjonsmerket
finnes på innsiden av stoppknapplokket, som vist nedenfor.
G541779
-
Seriemerke
Sensoroversikt
Maskinen er utstyrt med et omfattende
sett med sensorer som sikrer sikker drift. Disse sensorene sikrer
at roboten kan oppdage og reagere hvis en
hindring ligger i veien.
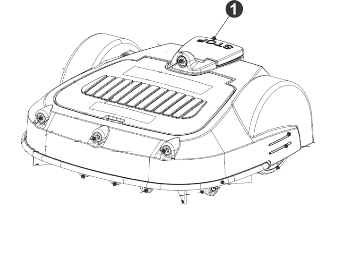
Stopp-knapp
Stopp-knappen  er lett synlig, plassert på
toppen av roboten. Hvis du trykker på denne knappen, slutter
roboten å bevege seg og klippe. Stoppknappen
fungerer også som et lokk, som når det løftes, gir
tilgang til robotens kontrollbrukergrensesnitt. En instruksjon
må utstedes ved hjelp av dette kontrollgrensesnittet
for å starte roboten på nytt.
er lett synlig, plassert på
toppen av roboten. Hvis du trykker på denne knappen, slutter
roboten å bevege seg og klippe. Stoppknappen
fungerer også som et lokk, som når det løftes, gir
tilgang til robotens kontrollbrukergrensesnitt. En instruksjon
må utstedes ved hjelp av dette kontrollgrensesnittet
for å starte roboten på nytt.
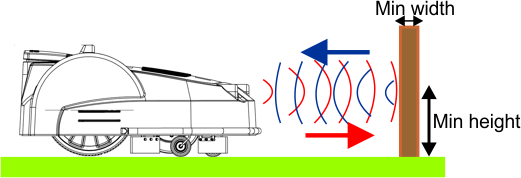
Sonarer som oppdager hindringer
Roboten er utstyrt med et sett
sonarsensorer for å oppdage hindringer. Roboten vil redusere
hastigheten hvis sonardetektorene oppdager
en hindring.
Deteksjon av hindringer med sonarsensorer
G536780
Roboten berører hindringen
forsiktig i lav hastighet. Roboten beveger seg bakover og velger en
tilfeldig retning mellom 60 °
og 120 °.
Disse sensorene kan oppdage objekter
som er:
- Minst 400 mm høye
- Minst 50 mm brede (fra alle
vinkler)
Hvis roboten alltid beveger seg
med lav hastighet, selv om det ikke er noen hindringer i sikte, indikerer
det et problem med sensorene. I dette tilfellet
bør du kontakte serviceteamet for å få hjelp til å
analysere problemet. Det er flere potensielle
årsaker, for eksempel kondens inne i sonarhuset, en kabelkontakt
er løs, eller sonarelektronikken er skadet. Problemet kan
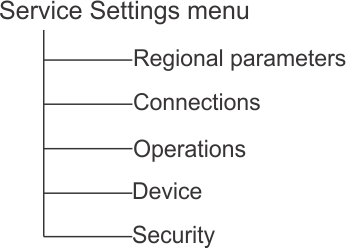
analyseres ved hjelp av Teknikerens meny (9) > Service > Sonar og Teknikerens meny
(9) > Service > Tester > Sonar.
Støtfanger
Støtfangeren er en trykksensor
som registrerer når roboten berører en hindring. Når
støtfangeren berører hindringen, vil roboten
bevege seg bakover og deretter rotere gjennom en vinkel
til den kan unngå hindringen.
Spole
Induksjonsspolen
registrerer intensiteten til magnetfeltet som genereres i den perifere
ledningen. Den maksimale intensiteten er
plassert på ledningen som får roboten til å stoppe,
rotere og deretter fortsette å klippe i en ny retning.
Vippesensor
Vippesensoren registrerer vinkelen
på skråningen roboten arbeider på. En alarm utløses
og roboten slutter å bevege seg hvis
vinkelen overskrides.
Veltesensor
Veltesensoren oppdager om roboten
har blitt tippet opp ned eller om noen prøver å starte motoren
når roboten er opp ned.
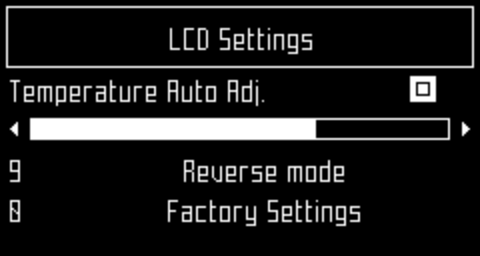
Temperatursensor
Temperatursensoren måler
omgivelsestemperaturen og vil forhindre at roboten fungerer hvis denne
temperaturen er for lav. Minimumstemperaturen
som roboten kan operere med, er angitt som en driftsparameter.
Tilbehør/tilleggsutstyr
Et utvalg av Toro-godkjent tilbehør
som kan brukes sammen med maskinen for å forbedre og utvide dens
funksjoner er tilgjengelig. Ta kontakt med din
autoriserte serviceforhandler eller autoriserte Toro-forhandler, eller gå til www.Toro.com for å få en
liste over godkjent tilbehør og utstyr.
For å oppnå optimal
ytelse og holde maskinen i sikkerhetsgodkjent stand må du bare
bruke originale Toro-reservedeler og -tilbehør.
Spesifikasjoner
Merk: Spesifikasjoner og konstruksjon kan forandres uten varsel.
Kapasitet
| Maksimalt arbeidsområde |
30 000 m2 |
| Anbefalt arbeidsområde |
24 000 m2 |
| Jobbehastighet
|
3,6 km/t
|
| Standard maksimal helling |
30 % (17 °) |
| Baller per dag
|
Gjennomsnitt = 15 600. Maksimum=19 500. |
| Plukkebredde
|
956 mm
|
| Kurvkapasitet
|
320–350 baller
|
| Maksimalt støynivå |
61 dB(A) ved 1 m 52 dB(A)
ved 5 m |
Batteri
| Type
|
LIFePo4
|
| Nominell spenning |
25,6 V
|
| Nominell kapasitet |
19,2 Ah
|
| Energi
|
491,5 Wh
|
| Tid til fulladet (minimum) |
80 minutter
|
| Gjennomsnittlig arbeidstid per
lading |
240 minutter |
| Gjennomsnittlig årsforbruk |
620 kWh (basert på bruk
i 11 måneder av året)
|
Vekt og dimensjoner
| Vekt [kg]
|
85 kg
|
| Lengde [mm]
|
118 cm
|
| Bredde [mm]
|
134 cm
|
| Høyde [mm]
|
54 cm
|
Programvare og overvåking
| PIN-kode for sikkerhet |
Ja
|
| GPS-posisjonering |
RTK
|
| Robotstyring via server og app. |
Standard
|
Intelligens
| Sonardeteksjon av hindringer |
4
|
| Gå tilbake til stasjonen
via GPS |
Ja
|
| Flere startsoner
|
Ja
|
| Flere felt
|
Ja, flere enn 2
|
| Flere roboter/stasjoner |
Maksimalt 2 roboter som bruker
avslippstasjonen. |
| Løftesensorer |
Nei
|
| Reverseringssensorer |
Ja. Får roboten til å
endre retning. |
| Sikkerhetsstøtfanger |
Elektronisk
|
| Vippesensorer
|
Ja. Får roboten til å
stoppe når den vippes mer enn 41 °.
|
Vedlikehold
Vedlikeholdsoversikt
- Vedlikehold betyr et sett oppgaver
som bør utføres regelmessig gjennom hele klippesesongen.
- Serviceintervallet avhenger til
en viss grad av driftsbelastningen til roboten, men det anbefales
at den vedlikeholdes av en autorisert tekniker
minst én gang i året.
- Ved vedlikehold av roboten for
optimal ytelse må du ikke forsøke å gjøre noen
endringer i roboten. Du risikerer å forstyrre
driften, forårsake en ulykke og skade deler.
Merk: Hvis du merker uvanlig oppførsel eller skade – ring en tekniker.
- Når du utfører disse
vedlikeholdsprosedyrene, skal følgende sikkerhetsforskrifter
overholdes:
- Stopp maskinen: Slå alltid
av strømmen og vent til alle bevegelige deler har stanset før
du håndterer maskinen.
- Bruk deaktiveringsenheten før
følgende:
- Før du arbeider på eller
løfter maskinen.
- Før du fjerner en tilstopping.
- Før du sjekker, rengjør
eller utfører arbeid på maskinen.
- Etter å ha truffet en gjenstand
for å kontrollere om maskinen er skadet.
- Hvis maskinen begynner å
vibrere for mye.
- Sørg for at alle mutre, bolter
og skruer er godt tilstrammet for å være sikker på
at maskinen er trygg å bruke.
- Bruk hansker: Vernehansker må
brukes når du håndterer maskinen.
- Bruk alltid deler fra originalutstyrsprodusenten
((Original Equipment Manufacturer – OEM). I
tillegg til risikoen for ulykker, vil bruk av ikke-OEM-deler føre
til annullering av garantien for eventuelle resulterende
skader.
Anbefalt vedlikeholdsplan
Merk: Disse prosedyrene skal utføres med anbefalt hyppighet av den
vanlige brukeren av roboten.
Merk: Gjennom klippesesongen bør du regelmessig kontrollere at alle
skruer, muttere og bolter er korrekt strammet. Stram til løse
deler, og kontakt en autorisert Toro-tekniker
hvis det finnes skader eller tegn på et problem.
| For hver bruk eller daglig |
|
| Hver 40. time |
|
|
|
|
|
|
|
|
|
|
|
| Hver 6. måned
|
|
| Årlig eller før lagring |
|
| |
Rengjøring
Rengjøre maskinen
I perioder
med vått vær er det nødvendig å sikre at gjørme
og gress ikke samler seg på de bevegelige delene, så som
hjulene og klippehodene. Disse bør inspiseres
og rengjøres daglig.
-
Trykk på
den røde knappen for å stoppe roboten.
-
Vend maskinen
over på siden.
-
Slå
av maskinen.
-
Fjern eventuelle
oppsamlinger av gress og smuss ved hjelp av en blåser, trykkluft
og/eller en stålbørste.
-
Skrubb maskinen
med en myk, fuktig klut eller svamp.
-
Bruk en såpeløsning
hvis maskinen er veldig skitten.
Rengjøring av ladekontaktene
-
Gni ladekontaktflatene
med sandpapir (280-gradering) til de ser rene ut.
Rengjøre støtfangeren
-
Kontroller
at støtfangermaterialet er intakt. Hvis det er kutt eller rifter,
kontakt en autorisert Toro-distributør.
-
Rengjør
støtfangeren med en fuktig klut.
Rengjøre sonarsensorene
Sonarsensorene må holdes
rene hvis de skal fungere ordentlig. Alle sensorene må fungere
skikkelig. En alarm utløses hvis noen
av sensorene ikke fungerer som de skal.
-
Fjern søle,
gress eller smuss, og tørk av med en fuktig klut.
Rengjøre forhjulene
-
Fjern søle
og gress med en stålbørste eller en klut.
-
Sjekk at
hjulene roterer lett og at det ikke er for mye slakk. Hvis det er
for mye slark, bytt hjulene.
Rengjøre forhjulakselen
-
Rengjør
fremre hjulaksel med en børste og/eller en klut.
-
Inspiser
akselen visuelt. Hvis det er et problem, bytt ut akselen.
Rengjøre bakhjulene
-
Fjern søle
og gress med en stålbørste.
Vedlikehold av elektrisk system
Sjekker koblingene
-
Inspiser
ledningskoblingene under roboten visuelt. Ta kontakt med et autorisert
Toro-forhandlerverksted hvis det oppdages
problemer.
Batteriservice
Den automatiske (programmerte)
driften av roboten optimaliserer batterilevetiden. Det anbefales å
la roboten håndtere arbeidssyklusene
sine. Hvis disse arbeidssyklusene virker uvanlig korte, bør du
kontakte et autorisert Toro-forhandlerverksted for å kontrollere
batteriets tilstand.
Merk: Det er mulig å overvåke disse syklusene ved hjelp av portalen.
Ordliste
Grensemodus
Når roboten klipper
gresset helt i utkanten av feltet. Dette gjøres en rekke ganger
per uke.
Syklus
En syklus er robotens arbeidsøkt.
Den starter når roboten forlater stasjonen og slutter når
den kommer tilbake til stasjonen, eller det er et
problem som stopper arbeidssyklusen.
Enhet
En samling roboter og brukere
som opererer på et nettsted. Informasjon om robotene i en enhet
kan ses på nettportalen.
GPS-navigasjonssone
Dette er en
RTK GPS-sone som defineres av prosessen for grensegjenkjenning.
Den omfatter hele arbeidsområdet. Undersoner kan
deretter opprettes ved å kopiere og redigere denne sonen
for å optimalisere effektiviteten til roboten.
GPS-punkt
Et spesifikt punkt i et
område som roboten bruker til å returnere til eller forlate
en stasjon. Punktet er definert av dets breddegrad
og lengdegrad. Roboten tar en direkte rute til dette punktet og følger
deretter sporgrensen og sløyfetråden for
å gå tilbake til stasjonen.
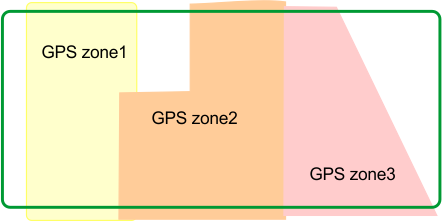
GPS-sone
En GPS-sone defineres av
et sett med GPS-koordinater. Det gjør at en kablet område
kan deles opp uten å måtte bruke ekstra
ledninger og kanaler.
GPS-soner i en kablet område
G520046
Dette gir større fleksibilitet
ved definering av arbeidsområder, siden det kan planlegges at
roboten arbeider med optimal effektivitet over sonene.
Uvirksom
En robot vil gå inn
i inaktiv modus hvis gjeldende oppdrag har blitt avsluttet ved hjelp
av Stopp-knappen. Som standard går roboten
i hvilemodus etter 15 minutter.
Øy
En løkke i den perifere
ledningen som er spesielt installert for å forhindre at roboten
jobber inne i den. Den perifere ledningen føres
rundt hindringen, og tilnærmings- og returledningene legges ved
siden av hverandre.
Kart
Kart over robotens ruter på
portalen.
Kartlegging
Informasjonen som bygges
opp av roboten ved hjelp av GPS-data.
No-Go-sone
GPS-definerte No-Go-soner
er regioner på feltet definert av GPS-koordinater, der roboten
aldri kan gå inn mens den er i en av sine autonome
driftstilstander. GPS-definerte No-Go-soner brukes til å ekskludere
soner fra arbeidsområdet til roboten som ikke
kan oppdages under grenseoppdagelse. Bruk av GPS-definerte No-Go-soner
gjør at roboten kan beregne det mest effektive
klippemønsteret på forhånd. GPS-definerte No-Go-soner
brukes til å ekskludere hindringer, vanligvis gjort av øyer
og pseudoøyer.
Hinder
Et objekt i feltet som
roboten må unngå. Hindringer kan være permanente (f.eks.
trær, møbler) eller forbigående (f.eks. dyr).
Hindringer oppdages av sensorer. Permanente hindringer
kan unngås ved å lage løkker i periferikabelen for
å danne «øyer» eller «pseudo-øyer».
Område
Et område som skal
klippes innen en perifer ledning. Minst ett område er knyttet
til én ledning. Flere områder kan defineres.
Prosent
Dette representerer andelen
tid som roboten vil bruke på å jobbe med en bestemt område.
Hvis det kun finnes ett område, vil roboten
tilbringe 100 % av tiden der.
Perifer ledning
En ledning
lagt under overflaten av feltet som definerer området der roboten
jobber. Området definert av perifer ledning kalles
et «område».
Pseudo-øy
Den perifere
ledningen tas rundt hindringen, og opprettholder en bestemt avstand
mellom tilnærmingen og returledningene.
Statusverdier for roboten
- Av
Roboten er slått av.
- Av etter alarm
Roboten har slått seg selv
av etter en alarm.
- Alarm
Roboten er i alarmtilstand.
- Forblir
Roboten forblir på en ladestasjon.
- Lad
Roboten lader batteriet.
- På vei mot lossestasjon
Roboten skal til avslippstasjonen
for å tømme ut baller. Denne statusen starter når en
robot bestemmer seg for å returnere til
stasjonen.
- På vei mot ladestasjon
Roboten skal til ladestasjonen.
Denne statusen starter når roboten bestemmer seg for å returnere
til stasjonen.
- Ladestasjon
Roboten forlater stasjonen og
begynner å jobbe.
RTK GPS-sone
Arbeidsområdet for
en robot som utfører mønsterklipping. RTK GPS-sonen defineres
av roboten som går rundt den perifere ledningen.
Eiendom
Hele området som inkluderer
området der roboten jobber.
Dvale
En robot går i dvalemodus
15 minutter etter at det har oppstått en alarm som ikke
har blitt fjernet. Etter 2 dager i dvalemodus går
roboten over i AV-modus. Dette vil også skje hvis batteriladenivået
når et lavt nivå. I hvilemodus bruker roboten minimalt
med strøm for å redusere risikoen for batteriet.
Roboten kan
tas ut av dvalemodus ved å:
- fjerne alarmen og slå på
roboten ved hjelp av knappen på LED-skjermen
- skyve roboten til ladestasjonen
hvis batteriet er flatt
- sende en kommando for ekstern
vekking via nettportalen
Startsone
En angitt posisjon i et
område som bestemmer hvor roboten skal begynne å jobbe.
Stasjonssløyfe
En stasjonssløyfe
er en kort ledning rundt en ladestasjon som brukes til å lede
roboten inn i stasjonen. Når roboten oppdager
at den er i stasjonssløyfen, følger den ledningen til
den ankommer stasjonen.
Terreng
Et område med gress
rundt feltet, som ikke skal klippes.
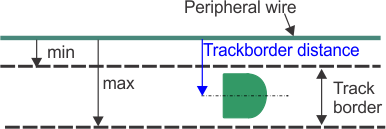
Sporingsgrense
En bredde av
gress rundt kanten av området der roboten jobber. Roboten følger
sporgrensen når den forlater eller returnerer
til en stasjon, med mindre den bruker GPS. Det er ikke angitt noen
sporgrense for en ledning som fungerer som en «retur til
stasjonssløyfe».
Sporgrensen ligger ved siden av
den perifere ledningen, og er definert av minimums- og maksimumsdimensjoner
angitt som installasjonsparametere. Den er bredere
enn roboten. Ruten roboten tar innenfor sporgrensen velges på
en tilfeldig måte. Dette sikrer at roboten ikke
gjentatte ganger beveger seg langs samme bane og dermed skaper
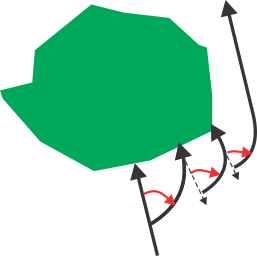
spor i feltet. Hvis roboten støter på en hindring mens den
er i sporgrensen, vil sensorene få den til
å reversere og deretter rotere gjennom en tilfeldig vinkel for
å fortsette. Dette kan gjentas flere ganger
om nødvendig.
Manøvrer for å unngå
en hindring innenfor sporgrensen
G520315