Produktoversigt
Oversigt over RTK GPS'en
- En almindelig GPS' positionsdata,
der hentes fra satellitter ved hjælp af GNSS (Global Navigation
Satellite System), er nøjagtige til
mellem 5 m og 10 m. Dette skyldes, at det signal, der modtages
fra en satellit, er forvrænget på grund af atmosfæriske
og miljømæssige forhold. Positionsbestemmelse
med højere præcision kan opnås ved hjælp af RTK-teknik
(Real-Time Kinematic).
- Denne teknik indebærer brug af en RTK-basestation, der placeres
et fast sted, og som modtager GNSS-signaler fra satellitter.
Eftersom basestationen står ét bestemt
sted, vil de data, den modtager, være tilknyttet dens nøjagtige
placering.
- Robotterne er også udstyret
med antenner, der modtager GNSS-signaler fra satellitter for at bestemme
deres position. Både RTK-basestationen
og robotterne modtager GNSS-signalerne fra satellitter i forskellige
konstellationer (GPS, GLONASS, Galileo,
BeiDou). Eftersom robotterne bevæger sig rundt, er bestemmelsen
af deres position dog mindre præcis end positionsbestemmelsen
for den faste basestation.
- RTK-basestationen beregner korrektionsdata for hver af satellitterne
og sender disse data til robotten. Robotten kan derefter
bruge disse korrektioner til at opnå en nøjagtig
positionsbestemmelse på mellem 2 cm og 3 cm. Med en
sådan nøjagtig positionsbestemmelse
er robotten i stand til at følge et fastlagt mønster
og dække banen i en række lige linjer.
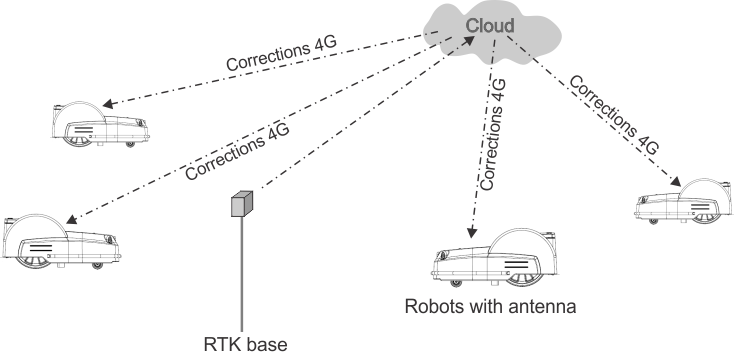
Korrektioner
kan også foretages via clouden ved hjælp af 4G. I dette
tilfælde vil forhindringer ikke hindre overførslen af
korrektionsdata, og basestationen kan oprette forbindelse
til et ubegrænset antal robotter i afstande på op til 15 km.
Overførsel af korrektioner
ved hjælp af 4G
G520851
En basestation kan sende korrektioner
til flere robotter, men hver robot må kun modtage korrektioner
fra én basestation, så korrektionerne
forbliver ensartede.
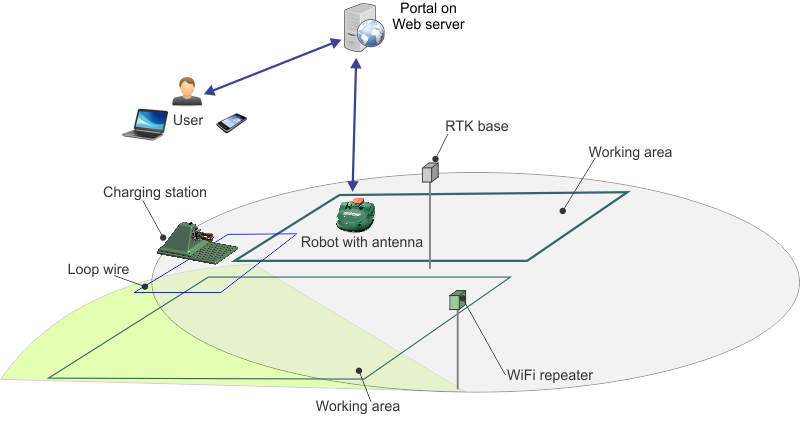
Grundlæggende komponenter
i RTK GPS-klippesystemet
G520852
Dette emne beskriver robottens
mekaniske egenskaber.
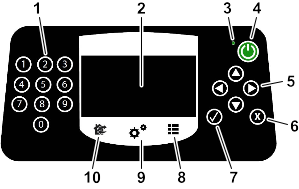
En bruger kan styre robotten direkte
ved hjælp af brugergrænsefladen. Når en robot er registreret
på portalen, der kører på en webserver:
- Robotten kan sende oplysninger
til denne server, som kan ses af brugeren.
- Brugeren kan give kommandoer til
robotten, vurdere dens ydeevne og justere konfigurationen.
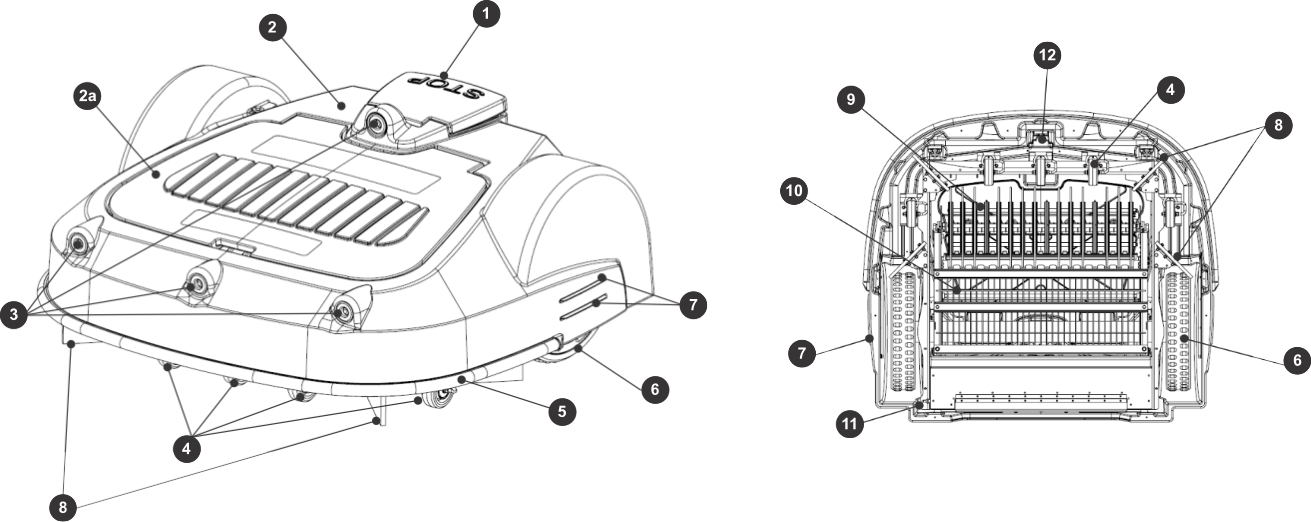
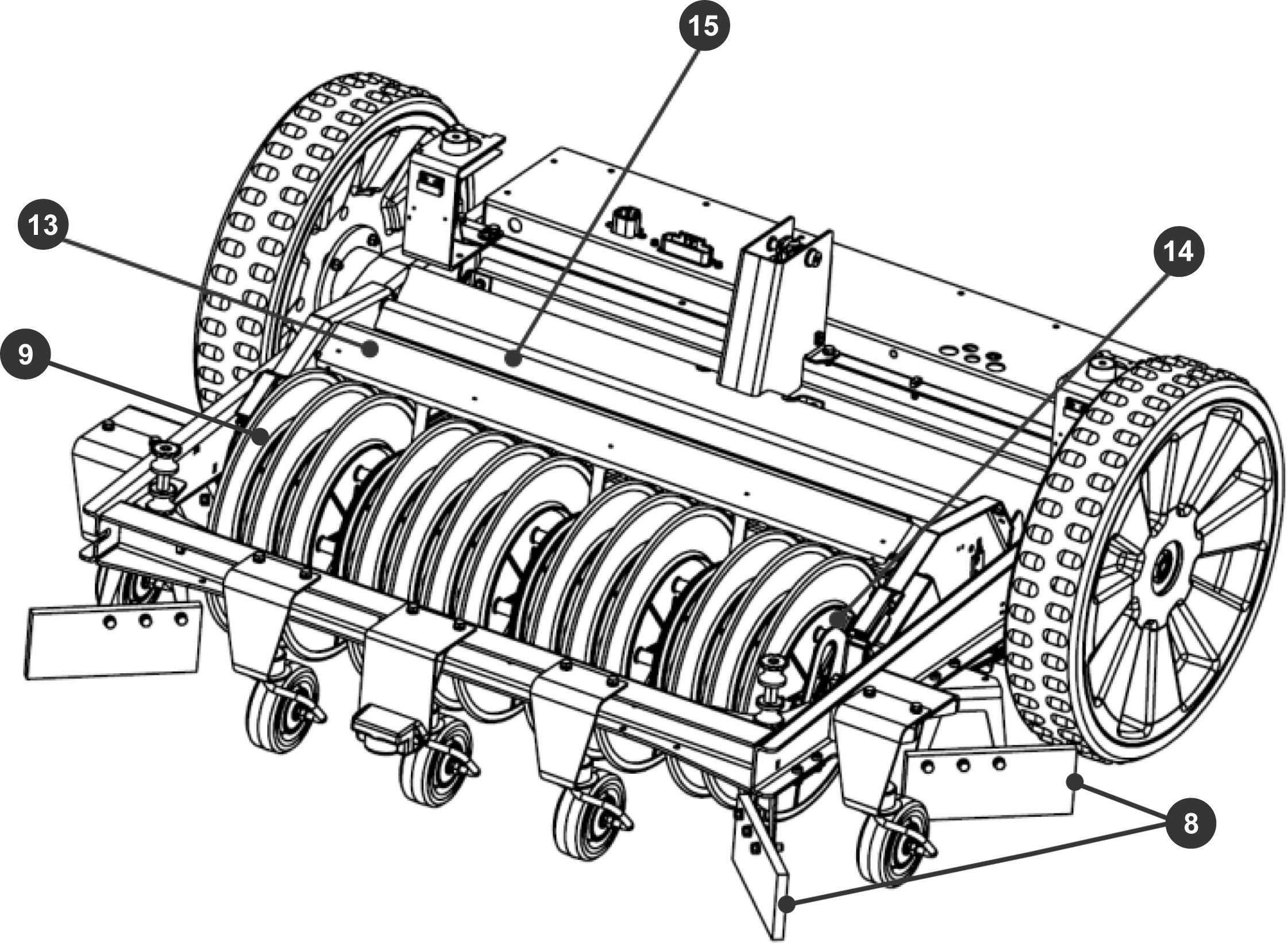
Range Pro 100-produktoversigt
Set ovenfra
G537619
G536774
-
Stopknap
-
Hus
2a: Kurvens låg
-
Sonarer til registrering af forhindringer
-
Forhjul
-
Stødsensor
-
Baghjul
-
Opladningskontaktpunkter
-
Bolddeflektorer
-
Opsamlingstromle
-
Opsamlingskurv
-
Strømafbryder
-
Spole
-
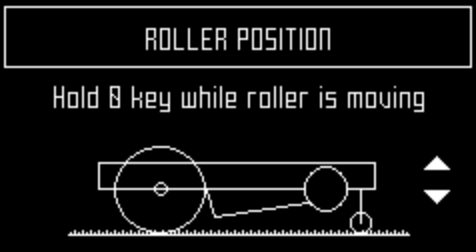
Boldoptællingsbånd
-
Rotationshastighedsdetektor
-
Detektor for fuld kurv
Strømafbryder
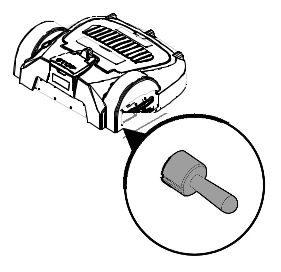 |
Strømafbryderen er placeret
under kappen på robottens højre bagside.
Flyt
strømafbryderen mod forsiden af maskinen (til positionen ON (til)) for at betjene robotten. Flyt strømafbryderen mod
bagsiden af maskinen (til positionen OFF (fra)) ved længere inaktiv
tid eller vinteropbevaring.
|
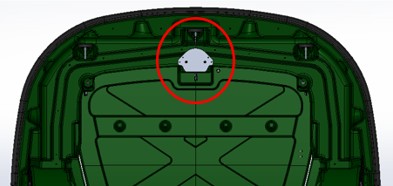
RTK GPS-antenne
G536775
Dette er en specifik GNSS-antenne,
der er monteret i midten foran på kappen. Den bruges til at modtage
data om robottens globale placering fra satellitter.
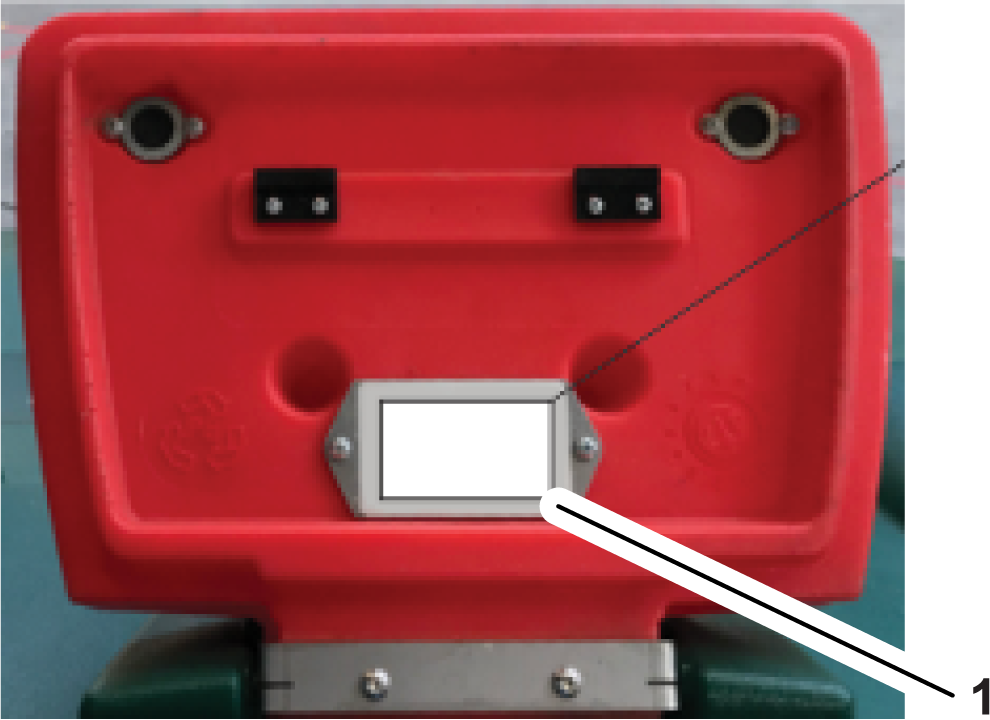
Seriemærkat
Identifikationsmærkaten
findes på indersiden af låget til stopknappen som vist nedenfor.
G541779
-
Seriemærkat
Sensoroversigt
Maskinen er udstyret med et omfattende
sæt sensorer med henblik på sikker drift. Disse sensorer
sikrer, at robotten kan registrere og reagere,
hvis der ligger en forhindring i dens driftsbane.
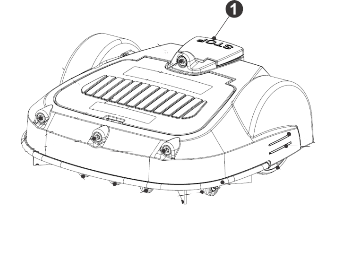
Stopknap
Stopknappen  er nem at se og er placeret øverst
på robotten. Når du trykker på knappen, stopper robotten
al bevægelse og klipning. Stopknappen
fungerer også som et låg, der kan løftes for at
få adgang til robottens kontrolbrugergrænseflade. For at
genstarte robotten skal den modtage en
kommando fra denne kontrolbrugergrænseflade.
er nem at se og er placeret øverst
på robotten. Når du trykker på knappen, stopper robotten
al bevægelse og klipning. Stopknappen
fungerer også som et låg, der kan løftes for at
få adgang til robottens kontrolbrugergrænseflade. For at
genstarte robotten skal den modtage en
kommando fra denne kontrolbrugergrænseflade.
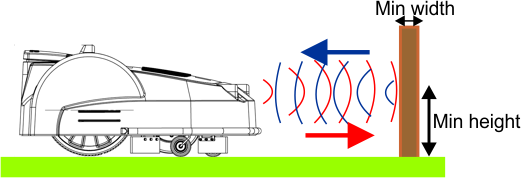
Sonarer til registrering af forhindringer
Robotten er udstyret med et sæt
sonarsensorer, der kan registrere forhindringer. Robotten reducerer
hastigheden, hvis sonardetektorerne registrerer
en forhindring.
Registrering af forhindringer
med sonarsensorer
G536780
Robotten rører forsigtigt
ved forhindringen ved lav hastighed. Robotten bevæger sig baglæns
og vælger en tilfældig retning
mellem 60° og 120°.
Disse sensorer kan registrere
objekter, der er:
- mindst 400 mm høje
- mindst 50 mm brede (fra alle
vinkler).
Hvis robotten altid bevæger
sig med langsom hastighed, selv hvis der ikke er nogen forhindringer
i syne, kan det skyldes et problem med
sensorerne. I dette tilfælde skal du kontakte serviceteamet for
at få hjælp til at undersøge problemet. Der er
flere potentielle årsager, såsom
kondens inde i sonarafskærmningen, et løst kabelstik eller
beskadigelse af sonarelektronikken. Problemet
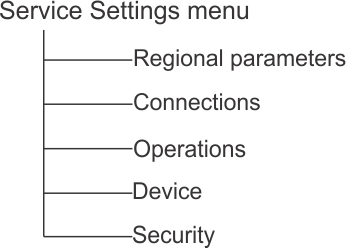
kan analyseres ved hjælp af Technician's menu
(Teknikerens menu) (9) > Service > Sonars (Sonarer) ogTechnician's menu
(Teknikerens menu) (9) > Service > Tests (Test) > Sonars (Sonarer).
Stødsensor
Stødsensoren er en tryksensor,
der registrerer, når robotten rører en forhindring. Når
stødsensoren rører forhindringen, vil
robotten bevæge sig baglæns for derefter at dreje
uden om forhindringen i en vinkel, indtil den kan undgå forhindringen.
Spole
Induktionsspolen
registrerer intensiteten af det magnetiske felt, der genereres inden
for den perifere lednings grænser. Den
maksimale intensitet er på selve ledningen, hvilket får
robotten til at standse, dreje rundt og fortsætte med at klippe
i en ny retning.
Hældningssensor
Hældningssensoren registrerer
vinklen på den skråning, som robotten arbejder på.
Hvis vinklen overskrides, udløses en alarm,
og robotten standser.
Væltesensor
Væltesensoren registrerer,
om robotten er blevet vendt på hovedet, eller om nogen forsøger
at starte motoren, mens robotten er vendt
på hovedet.
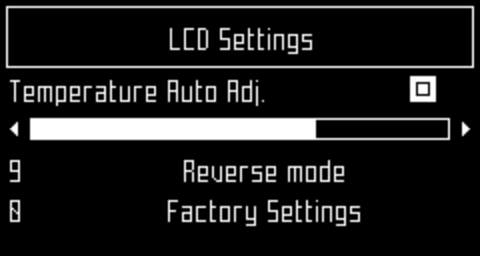
Temperatursensor
Temperatursensoren måler
omgivelsestemperaturen og forhindrer robotten i at arbejde, hvis temperaturen
er for lav. Minimumstemperaturen for, hvornår
robotten stopper med at arbejde, indstilles som en driftsparameter.
Redskaber/tilbehør
Der kan fås en række
forskellige Toro-godkendte redskaber og tilbehør
til brug sammen med maskinen, som gør den bedre og mere alsidig.
Kontakt en autoriseret serviceforhandler eller
autoriseret Toro-distributør, eller gå
ind på www.Toro.com for at få en fortegnelse
over alle godkendte redskaber og alt godkendt tilbehør. Brug
kun originale Toro-reservedele og tilbehør
for at sikre optimal ydelse og sikre, at maskinen fortsat overholder
sikkerhedscertificeringen.
Specifikationer
Bemærk: Specifikationer og design kan
ændres uden forudgående varsel.
Kapacitet
| Maksimalt arbejdsområde |
30.000 m2 |
| Anbefalet arbejdsområde |
24.000 m2 |
| Arbejdshastighed
|
3,6 km/t
|
| Standard maksimal hældning |
30 % (17 °) |
| Bolde/dag
|
Gennemsnit = 15.600.
Maks. = 19.500. |
| Opsamlingsbredde
|
956 mm
|
| Kurvkapacitet
|
320-350 bolde
|
| Maks. støjniveau |
61 dB(A) ved 1 m. 52 dB(A)
ved 5 m |
Batteri
| Type
|
LIFePo4
|
| Nominel spænding |
25,6 V
|
| Nominel kapacitet |
19,2 Ah
|
| Energi
|
491,5 Wh
|
| Tid til fuld opladning (min.) |
80 minutter
|
| Gennemsnitlig arbejdstid pr. opladning |
240 minutter |
| Gennemsnitligt årligt forbrug |
620 kWh (baseret på
brug i 11 måneder af året)
|
Vægt og mål
| Vægt [kg]
|
85 kg
|
| Længde [mm]
|
11.800 mm
|
| Bredde [mm]
|
13.400 mm
|
| Højde [mm]
|
5.400 mm
|
Software og overvågning
| Sikkerhedspinkode |
Ja
|
| GPS-positionering |
RTK
|
| Robotstyring via server og app |
Standard
|
Intelligens
| Registrering af forhindringer
vha. sonar |
4
|
| Vend tilbage til station via GPS |
Ja
|
| Flere startzoner
|
Ja
|
| Multigrunde
|
Ja, mere end 2
|
| Multirobotter/-station |
Maks. 2 robotter, der bruger afleveringsstationen. |
| Løftesensorer |
Nej
|
| Baksensorer
|
Ja. Får robotten til at ændre
retning. |
| Sikkerhedsstødsensor |
Elektronisk
|
| Hældningssensorer |
Ja. Får robotten til at stoppe,
når den vippes mere end 41°.
|
Vedligeholdelse
Vedligeholdelsesoversigt
- Vedligeholdelse refererer til
en række opgaver, der skal udføres regelmæssigt i hele
klippesæsonen.
- Eftersynsintervallet afhænger
til en vis grad af robottens driftsbelastning, men det anbefales,
at en autoriseret tekniker foretager eftersyn
mindst én gang om året.
- Robotten skal vedligeholdes med
henblik på optimering, men undlad at foretage ændringer
på den. Du risikerer at forstyrre
dens funktion, forårsage en ulykke og beskadige dele.
Bemærk: Ring til en tekniker, hvis du
bemærker usædvanlig adfærd eller beskadigelser.
- Ved udførelsen af disse vedligeholdelsesprocedurer
skal følgende sikkerhedsforskrifter overholdes:
- Stop maskinen: Sluk altid for
strømmen, og vent på, at alle bevægelige dele er standset,
før maskinen håndteres.
- Betjen deaktiveringsenheden, før
du gør følgende:
- Før du arbejder på eller
løfter maskinen.
- Før du fjerner en blokering.
- Før du kontrollerer, rengør
eller arbejder på maskinen.
- Før du undersøger maskinen
for skader, efter at den har ramt en genstand.
- Hvis maskinen begynder at ryste
unormalt.
- Hold alle møtrikker, bolte
og skruer tilspændte for at sikre, at maskinen er i sikker driftsmæssig
stand.
- Brug handsker: Der skal bæres
beskyttelseshandsker under håndtering af maskinen.
- Brug altid originale OEM-dele
(Original Equipment Manufacturer). Udover risikoen for ulykker vil
brugen af uoriginale dele medføre
annullering af garantien for eventuelle skader som følge heraf.
Skema over anbefalet vedligeholdelse
Bemærk: Disse procedurer bør udføres
med det anbefalede interval ved regelmæssig brug af robotten.
Bemærk: I løbet af klippesæsonen
skal du regelmæssigt kontrollere, at alle skruer, møtrikker
og bolte er korrekt tilspændt. Tilspænd
dem, der er løse, og hvis der er skader eller tegn på
et problem, skal du kontakte en autoriseret Toro-forhandler.
| Før hver anvendelse eller
dagligt |
|
| Hver 40. driftstime |
|
|
|
|
|
|
|
|
|
|
|
| Hver 6. måned
|
|
| En gang om året eller før
opbevaring |
|
| |
Rengøring
Rengøring af maskinen
I perioder med vådt vejr
er det nødvendigt at sikre, at der ikke ophober sig mudder og
græs på de bevægelige dele, som er
hjulene og klippehovederne. Disse bør efterses og rengøres
dagligt.
-
Tryk på
den røde knap for at standse robotten.
-
Vip maskinen
om på bagsiden.
-
Sluk for
maskinen.
-
Fjern eventuelle
ophobninger af græs og snavs ved hjælp af en blæser,
trykluft og/eller en stålbørste.
-
Tør
huset af med en blød, fugtig klud eller svamp.
-
Hvis huset
er meget snavset, kan du bruge en sæbeopløsning.
Brug
aldrig opløsningsmidler.
Rengøring af opladningskontaktpunkter
-
Gnid opladningskontaktpunkterne
med sandpapir (kornstørrelse 280), indtil de ser rene ud.
Rengøring af stødsensoren
-
Kontroller,
at stødsensoren er intakt. Hvis der er rifter eller revner, skal
du kontakte en autoriseret Toro-forhandler.
-
Rengør
stødsensoren med en fugtig klud.
Rengøring af sonarsensorerne
Sonarsensorerne skal holdes rene
for at kunne fungere korrekt. Det er vigtigt, at alle sensorerne fungerer
korrekt. Hvis en af sensorerne ikke fungerer
korrekt, udløses en alarm.
-
Fjern mudder,
græs og snavs, og tør af med en fugtig klud.
Rengøring af forhjulene
-
Fjern mudder
og græs med en stålbørste eller en klud..
-
Kontroller,
at hjulene kan dreje frit, og at der ikke er for meget slør.
Hvis der er for meget slør, skal hjulene udskiftes.
Rengøring af forhjulsakslen
-
Rengør
forhjulsakslen med en børste og/eller en klud.
-
Efterse akslen.
Hvis der konstateres et problem, skal akslen udskiftes.
Rengøring af baghjulene
-
Fjern mudder
og græs med en stålbørste.
Vedligeholdelse af elektrisk system
Kontrol af ledningsnettet
-
Efterse ledningsnettet
under robotten. Hvis der konstateres problemer, skal du kontakte en
autoriseret Toro-forhandler.
Eftersyn af batteri
Robottens automatiske (programmerede)
drift optimerer batteriets levetid. Det tilrådes at lade robotten
styre sine arbejdscyklusser. Hvis arbejdscyklusserne
virker usædvanligt korte, skal du kontakte en autoriseret Toro-forhandler
for at få tjekket batteriet.
Bemærk: Det er muligt at overvåge
disse cyklusser gennem portalen.
Ordliste
Skeltilstand
Når robotten klipper
græsset helt ude i kanten af jordlodden. Dette gøres et
antal gange om ugen.
Cyklus
En cyklus er en arbejdssession,
som robotten udfører. Den starter, når robotten forlader
stationen, og slutter, når robotten vender
tilbage til stationen, eller hvis der opstår et problem, der
stopper arbejdscyklussen.
Enhed
En samling af robotter
og brugere, der opererer inden for en grund. Oplysninger om robotterne
i en enhed kan ses på webportalen.
GPS-navigationszone
Dette er en
RTK GPS-zone, der afgrænses under skelregistreringsprocessen.
Den omfatter hele arbejdsområdet. Underzoner kan
efterfølgende oprettes ved at kopiere og redigere denne
zone med henblik på at optimere robottens effektivitet.
GPS-punkt
Et bestemt punkt i en jordlod,
som robotten bruger til at vende tilbage til eller forlade en station.
Punktet bestemmes ud fra dets breddegrad og længdegrad.
Robotten tager en direkte rute til dette punkt og følger derefter
sporskellet og løkkeledningen for at vende
tilbage til stationen.
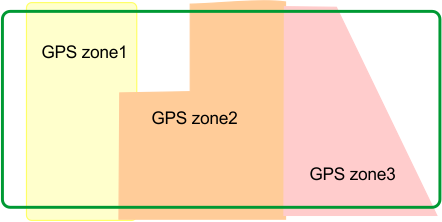
GPS-zone
En GPS-zone afgrænses
ud fra et sæt GPS-koordinater. Den gør det muligt at opdele
en kablet jordlod uden at skulle bruge yderligere
ledninger og kanaler.
GPS-zoner i en kablet jordlod
G520046
Dette giver større fleksibilitet
ved afgrænsning af arbejdsområder, da robotten kan indstilles
til at arbejde med optimal effektivitet over zonerne.
Inaktivitet
En robot går i inaktiv
tilstand, hvis den aktuelle opgave er blevet afsluttet med stopknappen.
Som standard går robotten i dvaletilstand efter
15 minutter.
Ø
En løkke, der dannes
med den perifere ledning og som er særligt installeret for at
forhindre robotten i at arbejde inden i den. Den
perifere ledning føres rundt om forhindringen, og de to ledningestykker,
der nu ligger mellem øen og skellet (fremledningen
og tilbageledningen), lægges ved siden af hinanden.
Kort
Kort over robottens ruter på
portalen.
Kortlægning
De oplysninger,
der indsamles af robotten ved hjælp af GPS-data.
No-go-zone
GPS-afgrænsede no-go-zoner
er områder på grunden, der fastlægges ud fra GPS-koordinater,
som robotten aldrig kan tilgå, hvis den bruger
en af sine autonome driftstilstande. GPS-afgrænsede no-go-zoner
bruges til at udelukke zoner fra robottens arbejdsområde,
som ikke kan registreres under skelregistrering. Med
GPS-afgrænsede no-go-zoner kan robotten beregne det mest effektive
klippemønster på forhånd. GPS-afgrænsede
no-go-zoner bruges til at udelukke forhindringer, hvilket typisk sker
ved hjælp af øer og pseudo-øer.
Forhindring
En genstand på grunden,
som robotten skal undgå. Forhindringer kan være permanente
(f.eks. træer, møbler) eller midlertidige
(f.eks. dyr). Forhindringer registreres af sensorer. Permanente
forhindringer kan undgås ved at lave løkker med den perifere
ledning, der udgør såkaldte "øer"
eller "pseudo-øer".
Jordlod
Et område, der skal
klippes, inden for en perifer lednings grænser. Mindst én
jordlod er forbundet med én ledning. Det er
muligt at afgrænse flere jordlodder.
Procentdel
Dette repræsenterer
den andel af tid, som robotten vil bruge på at arbejde på
en bestemt jordlod. Hvis der kun er én jordlod,
bruger robotten 100 % af sin tid der.
Perifer ledning
En ledning,
der ligger under grundens overflade, og som afgrænser det område,
robotten arbejder inden for. Området, der afgrænses
af den perifere ledning, kaldes en "jordlod".
Pseudo-ø
Den perifere
ledning føres rundt om forhindringen, og der sikres en given
afstand mellem fremledningen og tilbageledningen.
Robotstatusværdier
- Off (Fra)
Robotten er blevet slukket.
- Off after alarm (Slukket efter
alarm)
Robotten har slukket sig
selv efter en alarm.
- Alarm (Alarm)
Robotten er i alarmtilstand.
- Staying (Bliver)
Robotten venter ved en ladestation.
- Charge (Opladning)
Robotten er ved at oplade batteriet.
- Heading for unload station (På
vej mod afleveringsstation)
Robotten
er på vej hen til afleveringsstationen for at aflevere golfbolde.
Denne status aktiveres, når en robot vælger at
vende tilbage til stationen.
- Heading for charge station (På
vej mod ladestation)
Robotten
er på vej hen til ladestationen. Denne status aktiveres, når
robotten vælger at vende tilbage til stationen.
- Leaving station (Forlader station)
Robotten forlader stationen og
begynder at arbejde.
RTK GPS-zone
Arbejdsområdet, hvori
en robot klipper i et mønster. RTK GPS-zonen afgrænses ved,
at robotten foretager en tur rundt langs den perifere
ledning.
Grund
Hele området, hvilket
omfatter det område, hvori robotten arbejder.
Dvale
En robot går i dvaletilstand
15 minutter, efter at en alarm er blevet udløst, men ikke
blevet ryddet. Efter 2 dage i dvaletilstand slukker
robotten sig selv (OFF). Dette sker også, hvis batteriniveauet
når at blive lavt. I dvaletilstand bruger robotten
minimal strøm for at spare på batteriet.
Robotten kan
bringes ud af dvaletilstand ved at:
- rydde alarmen og tænde robotten
ved hjælp af knappen på LED-skærmen
- skubbe robotten hen til ladestationen,
hvis batteriet er fladt
- sende en fjernkommando om vækning
via webportalen
Startzone
En defineret position på
en jordlod, der afgør, hvor robotten skal begynde at arbejde.
Stationsløkke
En stationsløkke
er en kort ledning rundt om en ladestation, som bruges til at guide
robotten ind i stationen. Når robotten registrerer,
at den befinder sig i stationsløkken, følger den ledningen,
indtil den når frem til stationen.
Terræn
Et græsareal rundt
om grunden, der ikke skal klippes.
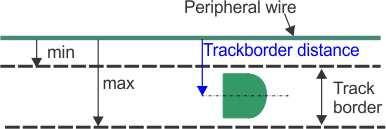
Sporskel
En græssti langs kanten
af den jordlod, hvori robotten arbejder. Robotten følger sporskellet,
når den forlader eller vender tilbage til en
station, medmindre den bruger GPS. Der oprettes ikke noget sporskel
for en ledning, der fungerer som en "vend tilbage
til station-løkke".
Sporskellet ligger ved siden af
den perifere ledning og afgrænses ved hjælp af en minimums-
og maksimumsafstand, der indstilles som installationsgrænser.
Sporskellet er bredere end robotten. Vejen, robotten tager inden for
sporskellet, vælges tilfældigt. Dette
sikrer, at robotten ikke bliver ved med at bevæge sig langs den
samme bane, så der dannes hjulspor på grunden. Hvis
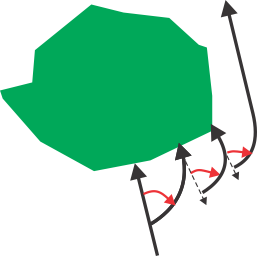
robotten støder på en forhindring, mens den
befinder sig i sporskellet, vil sensorerne få den til at bakke
for derefter at dreje uden om forhindringen i en
tilfældig vinkel, så den kan fortsætte. Denne manøvre
kan blive gentaget flere gange, hvis det er nødvendigt.
Manøvrer til at undgå
en forhindring inden for sporskellet
G520315