Il modo più
semplice per garantire che ciascuna area e i suoi bordi vengano tosati
regolarmente è l'utilizzo della programmazione
sequenziale. Quando si utilizza la programmazione sequenziale,
il robot lavora in ciascuna area a turno e tosa i bordi una
volta completata la tosatura dell'area. Il robot
lavora seguendo il programma di lavoro definito.
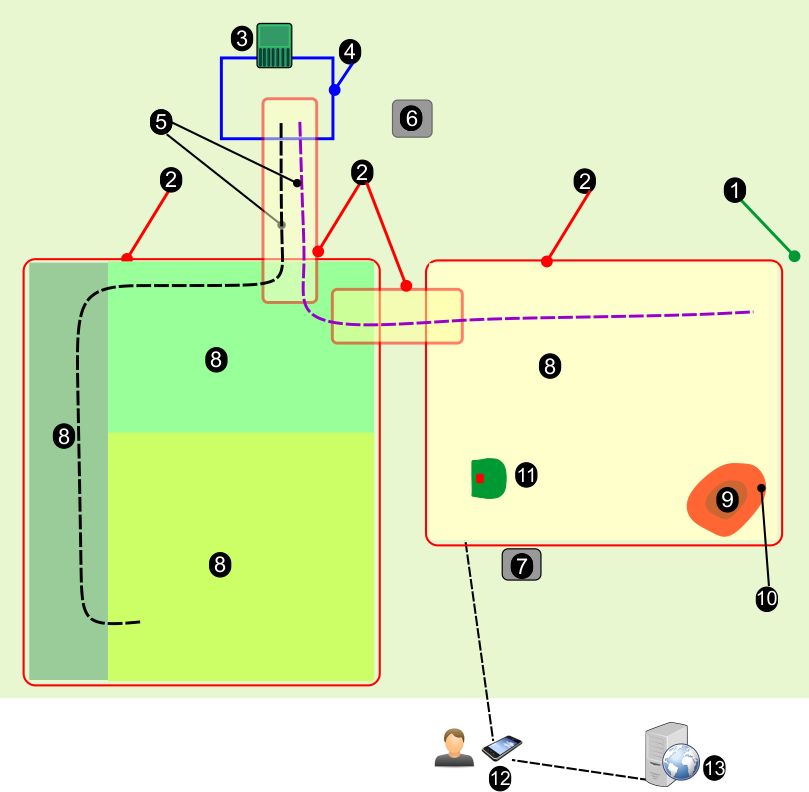
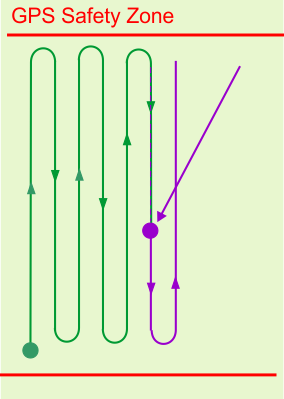
Il processo
della programmazione sequenziale è illustrato nella figura seguente.
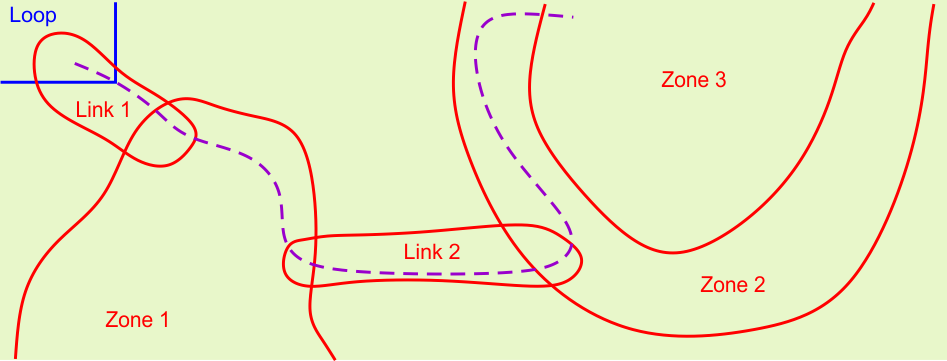
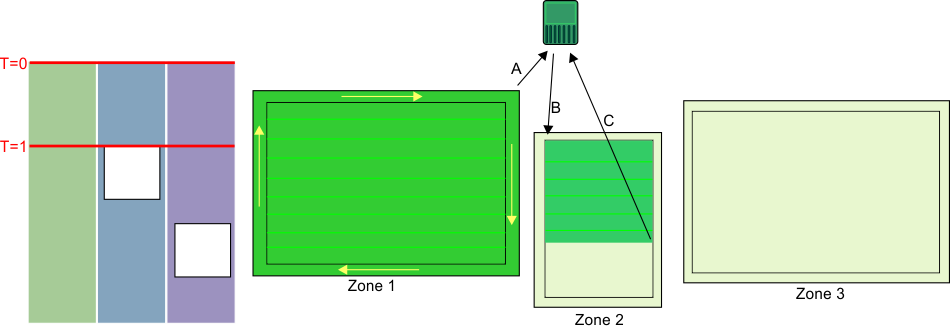
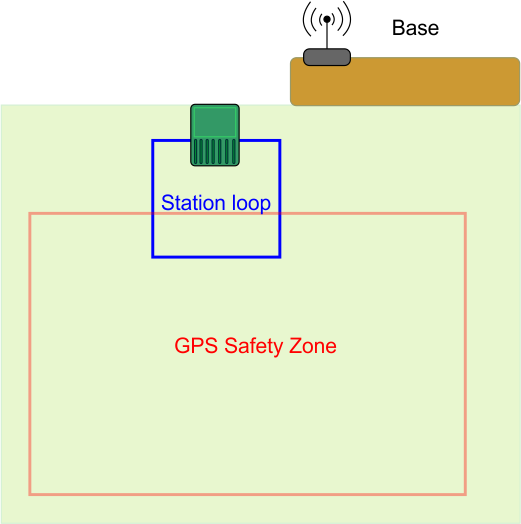
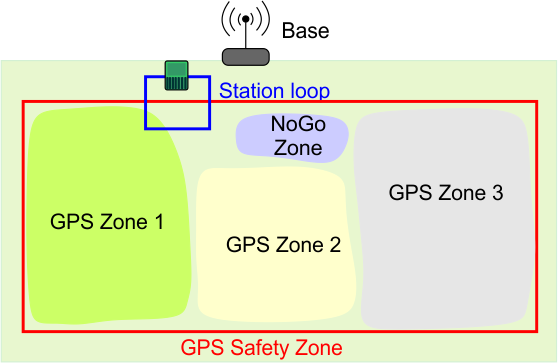
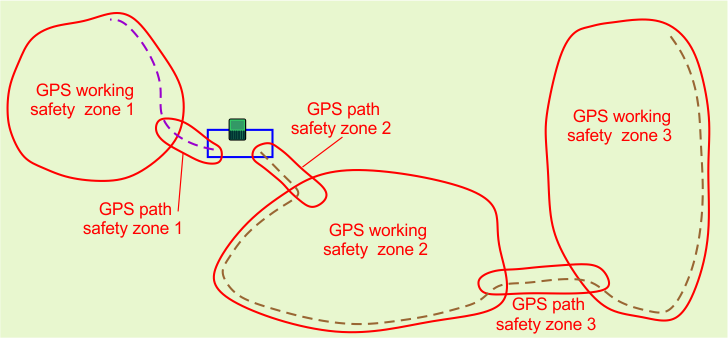
Consideriamo un'impostazione di installazione
con tre aree separate da tosare. Il programma definito indica
che le aree 2 e 3 non sono disponibili in alcuni periodi della
giornata.
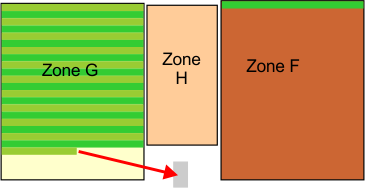
All'ora T=0, il robot inizia la
tosatura dell'area 1. Una volta tosata l'intera area, tosa i bordi,
quindi fa ritorno alla stazione (A). Il robot
raggiunge quindi l'area 2 (B) e la tosa fino all'ora T=1, quando il
programma definito indica che l'area 2 non
è disponibile. Il robot fa allora ritorno alla stazione (C).
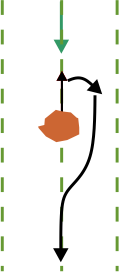
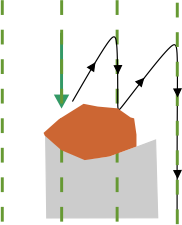
Nota: Mentre tosa i bordi, il robot segue la stessa direzione utilizzata
quando i bordi sono stati rilevati dal robot.
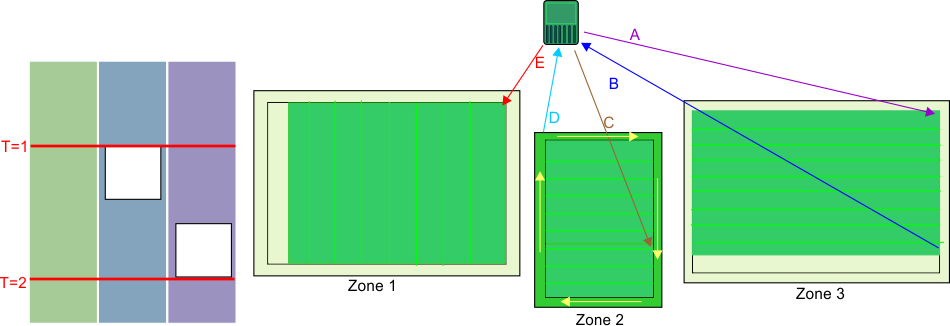
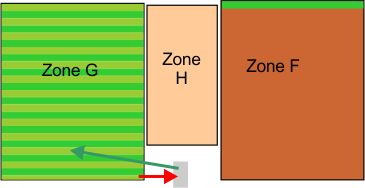
All'ora T=1, il robot passa all'area
3 (A) e la tosa fino a quando il programma non indica che l'area 3
non è disponibile. Il robot fa ritorno
alla stazione (B), quindi torna nell'area 2 (C) per completare la
tosatura di questa. Finito di tosare l'area,
tosa i bordi prima di fare ritorno alla stazione (D). Dato che l'area
3 è ancora non disponibile, il robot raggiunge
l'area 1 e inizia a tosarla seguendo una nuova direzione
(E).
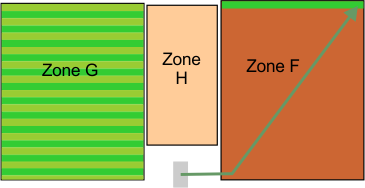
All'ora T=2, l'area 1 non è
stata completata, ma l'area 3 diventa disponibile.
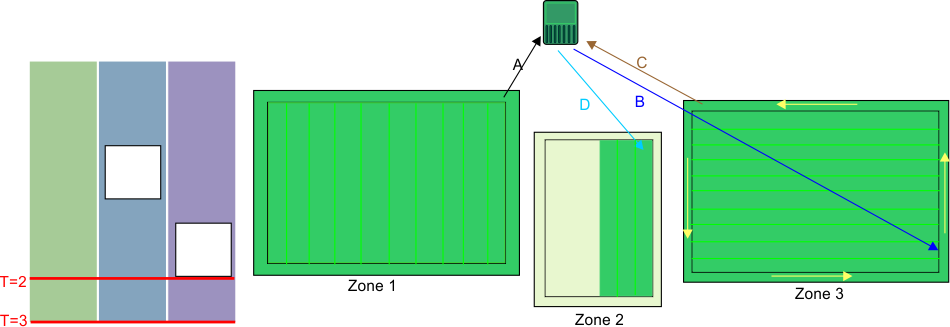
All'ora T=2, il robot completa
la tosatura dell'area 1 e ne tosa i bordi prima di fare ritorno alla
stazione (A). Il robot torna quindi all'area
3 (B) e completa la tosatura di quest'area e dei suoi bordi. Il robot
torna alla stazione (C), quindi inizia la
tosatura dell'area 2 in una nuova direzione (D).
Nota: Si consiglia vivamente di utilizzare la programmazione sequenziale.
Se questa non è utilizzata è necessario definire la percentuale
di tempo passato a lavorare in un'area
particolare e specificare il numero di volte alla settimana in cui
i bordi vanno tosati.