Exención de responsabilidad
e información normativa
Este producto cumple todas las
directivas europeas aplicables; si desea más detalles, consulte
la Declaración de Conformidad (Declaration
of Conformity – DOC) de cada producto.
 |
| |
| CALIFORNIA |
| |
| Propuesta 65 |
| |
| El uso
de este producto puede causar la exposición
a sustancias químicas
identificadas por el Estado de California como causantes
de cáncer, defectos
de nacimiento u otros daños reproductivos. |
| |
Certificación de compatibilidad
electromagnética
| Nacional: Este dispositivo cumple las normas
FCC Parte 15. El uso está sujeto a las dos condiciones siguientes:
(1) Este dispositivo no puede
causar interferencias dañinas y (2) este dispositivo debe aceptar
cualquier interferencia que pueda recibir, incluyendo
interferencias que puedan causar un funcionamiento
indeseable. |
| ID FCC: 2AC7Z-ESP32WROVERE; 2AET4RUT241AF IC: 21098-ESPS2WROVER; 26511-RUT241AF |
| Este equipo se ha sometido a pruebas
y se ha verificado que cumple los límites de un dispositivo digital
de la Clase B, conforme con la
parte 15 de las normas FCC. Estos límites se han determinado
para ofrecer una protección razonable contra la interferencia
perjudicial en una instalación
residencial. Este equipo genera, utiliza y puede radiar energía
de radiofrecuencia y, si no se
instala ni se utiliza con arreglo a las instrucciones, puede causar
interferencias perjudiciales para las radiocomunicaciones.
Sin embargo, no podemos garantizar que
no se produzcan interferencias en una instalación determinada.
Si este equipo provoca alguna
interferencia perjudicial en la recepción de radio o televisión
(lo que podrá determinar apagando y encendiendo el
equipo), se recomienda al usuario que corrija
la interferencia aplicando una o varias de las siguientes medidas:
- Reorientar o reubicar la antena
receptora.
- Aumentar la separación entre
el equipo y el receptor.
- Conectar el equipo a una toma
en un circuito eléctrico diferente al del receptor.
- Consultar al distribuidor o a
un técnico experto en radio/televisión para obtener ayuda.
|
| Australia
|
Nueva Zelanda |
 |
 |
| Japón |
|
 |
|
Introducción
Uso previsto
Esta estación base está
indicada para que la utilicen operadores profesionales contratados
para el cuidado autónomo y programable del
césped. Se ha diseñado con el fin de enviar y recibir información
de geoposicionamiento para guiar los robots autónomos
Turf Pro y Range Pro. El uso de los robots autónomos,
la batería, la estación de carga y la estación base
para otros fines distintos al uso previsto podría
suponer un peligro para usted y otras personas.
Lea esta información
detenidamente para aprender a utilizar y mantener correctamente su
producto, así como para evitar lesiones
y daños al producto. Usted es el responsable de utilizar el producto
de forma correcta y segura.
Convenciones del Manual
Este manual identifica
peligros potenciales y contiene mensajes de seguridad identificados
por el símbolo de alerta de seguridad, que
señala un peligro que puede causar lesiones graves o la muerte
si no sigue las precauciones recomendadas.
Este manual utiliza 2 palabras
para resaltar información. Importante llama la atención
sobre información mecánica especial, y Nota resalta información general
que merece una atención especial.
Clasificación de las alertas
de seguridad
El
símbolo de alerta de seguridad aparece tanto en este manual como
en la máquina para identificar mensajes de seguridad importantes
que deben seguirse con el fin de evitar accidentes.
El
símbolo de alerta de seguridad aparece encima de información
que le avisa de situaciones o acciones no seguras e irá seguido
del término PELIGRO, ADVERTENCIA, o PRECAUCIÓN.
 |
Peligro |
|
Peligro indica una situación
peligrosa inminente que, si no se evita, causará la muerte o lesiones graves.
|
Advertencia |
|
Advertencia indica una situación
potencialmente peligrosa que si no se evita, podría causar la muerte o lesiones graves.
|
Precaución |
|
Cuidado indica una situación
potencialmente peligrosa que si no se evita, puede causar lesiones menores o moderadas.
Seguridad en general
|
|
Evite el contacto con la electricidad
y manténgase alejado de fuentes de alimentación eléctricas. |
|
|
Lea y comprenda el contenido de
este Manual del operador antes de utilizar
este producto. |
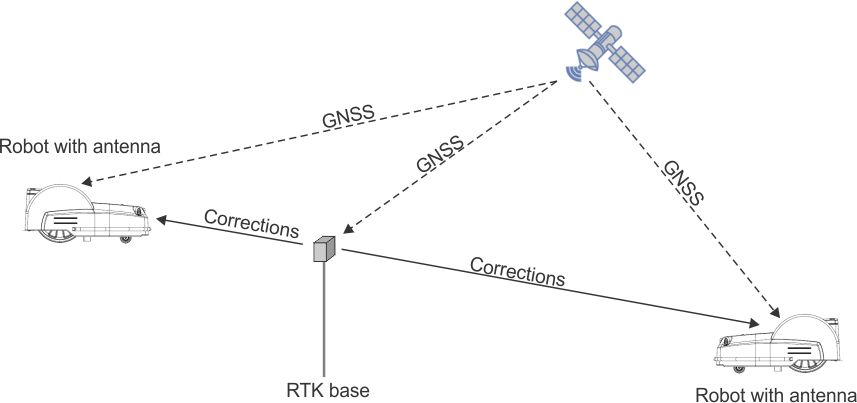
Acerca de RTK GPS
- Los datos de posicionamiento GPS
estándar que se obtienen de satélites que utilizan GNSS
(Global Navigation Satellite System,
sistema global de navegación por satélite) tienen una precisión
de entre 5 y 10 metros. Esto se debe a que la señal que se
recibe de un satélite está distorsionada
por las condiciones atmosféricas y ambientales. Se puede lograr
un posicionamiento de mayor precisión
utilizando una técnica RTK (cinemática en tiempo real).
- Esta técnica implica el uso
de una base RTK situada en una posición fija, que recibe señales
GNSS de los satélites. Como la
base es fija, los datos que recibe se refieren a su ubicación
exacta.
- Además, los robots están
equipados con antenas que reciben señales GNSS de los satélites
para determinar su posición. Tanto
la base RTK como los robots reciben las señales GNSS de satélites
de diferentes constelaciones (GPS, GLONASS, Galileo, BeiDou).
Sin embargo, como los robots están
en movimiento, la evaluación de su posición es menos precisa
que la de la base fija.
- La base RTK calcula los datos
de corrección de cada uno de los satélites y los envía
al robot. A continuación, el robot puede
utilizar estas correcciones para lograr una precisión
posicional de entre 2 y 3 cm. Con un posicionamiento tan preciso,
el robot puede seguir un patrón
definido y cubrir el campo en una serie de líneas rectas.
- La base RTK, a través de
un servidor en la nube, calcula su posición constantemente a
partir de señales del satélites y puede
haber variaciones en su posición calculada. La
posición que se utiliza como referencia para el robot se denomina
posición “de referencia”, que se determina mediante el
proceso de determinación automática.
- Existen dos métodos para
transferir las correcciones de posición a los robots: mediante
wifi o 4G. La decisión de utilizar
wifi o 4G debe realizarse según la evaluación del emplazamiento.
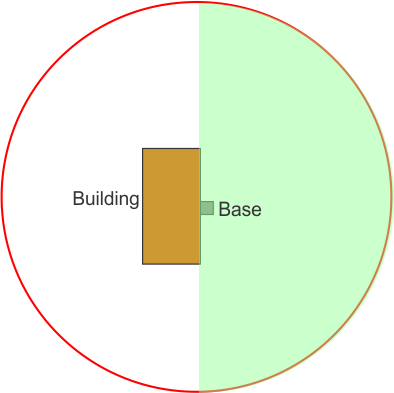
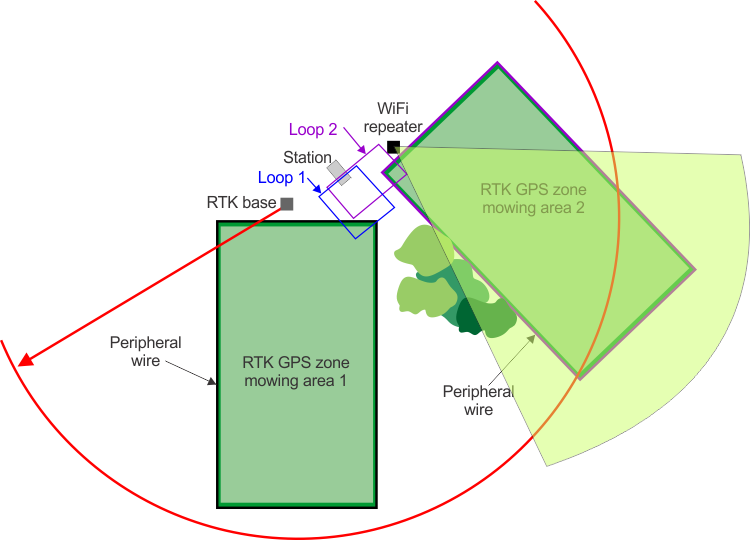
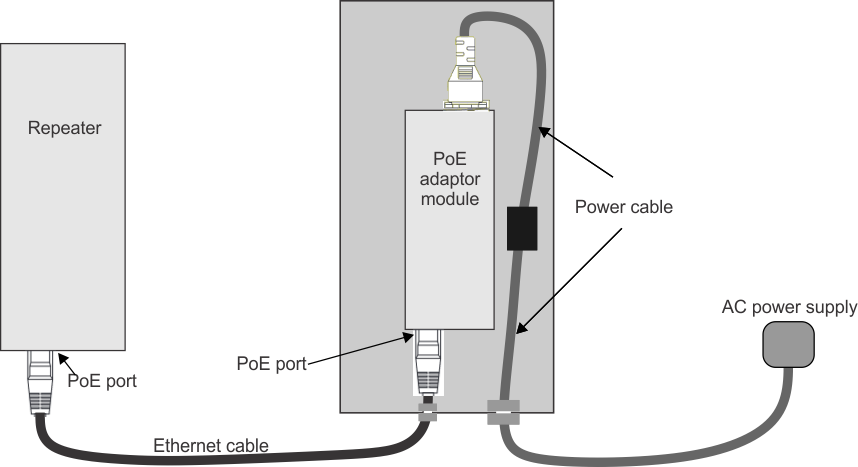
Las
correcciones mediante wifi entre el robot y la base RTK se pueden
hacer a una distancia de hasta 200 m si no hay ningún
obstáculo. Si es necesario cubrir distancias
mayores, se pueden utilizar hasta 2 repetidores wifi. Una base se
puede comunicar con hasta 5 robots.
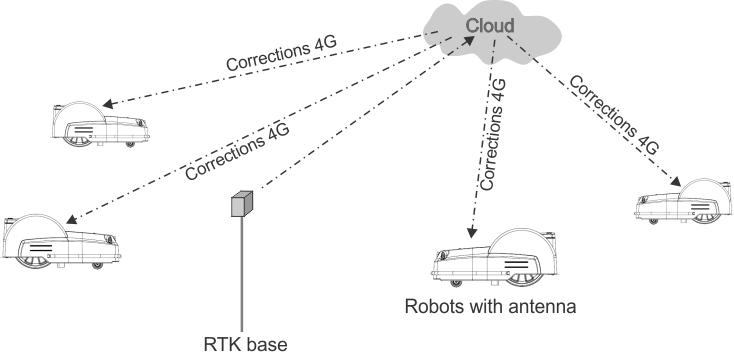
También pueden realizarse
correcciones a través de la nube, utilizando un servicio móvil
4G. En este caso, los obstáculos no impiden
la transferencia de datos de corrección y la base puede conectarse
a un número ilimitado de robots a distancias
de hasta 15 km.
Transferencia de correcciones
mediante 4G móvil
G520851
Una estación base puede enviar
correcciones a varios robots, pero cada robot debe recibir correcciones
de una sola estación base para mantener la
coherencia de las correcciones.
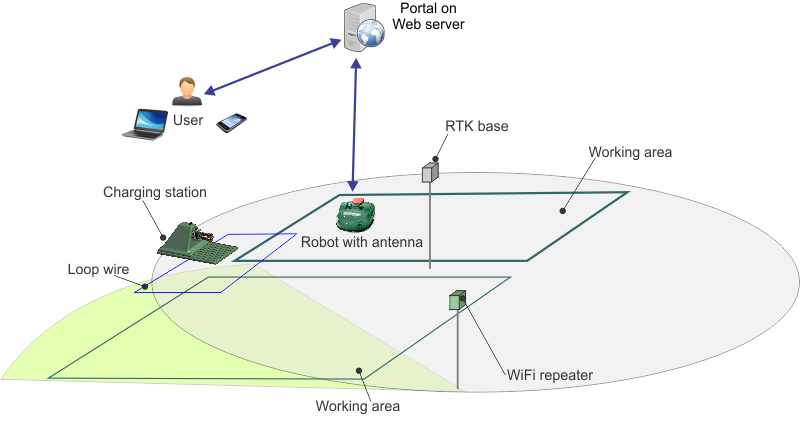
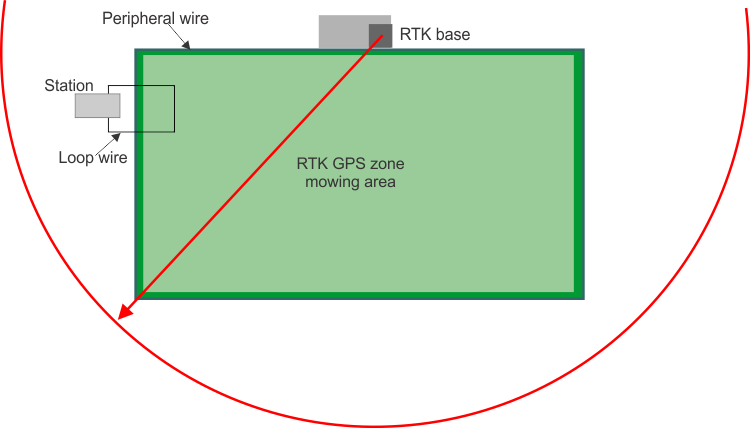
Componentes básicos del sistema
de siega RTK GPS
G520852
En este tema se describen las
características mecánicas del robot.
El usuario
puede ejercer un control directo sobre el robot utilizando la interfaz
de usuario. Una vez que se registra un robot
en el portal que se ejecuta en un servidor web:
- El robot puede enviar información
a este servidor y el usuario puede verla.
- El usuario puede emitir comandos
al robot, evaluar su rendimiento y ajustar la configuración.
Especificaciones técnicas
Nota: Las especificaciones y el diseño están sujetos a modificación
sin previo aviso.
|
|
30912XX
|
30915
|
| Corriente de entrada |
100-240 V/50-60
Hz/5 W |
| Temperatura de funcionamiento |
-20 °C/+80 °C |
| Humedad
|
máx. 95 % |
| Peso
|
2 kg |
| Dimensiones (sin antena
wifi) |
240 mm (altura)
x 190 mm (anchura) x 90 mm (profundidad)
|
| Comunicación |
4G
|
Wifi
|
| Cobertura de campo |
Máx. 15 km entre la
base y el robot. |
Máx. 200 m entre la base
y el robot. |
| Carcasa
|
Clasificación
IP44 |
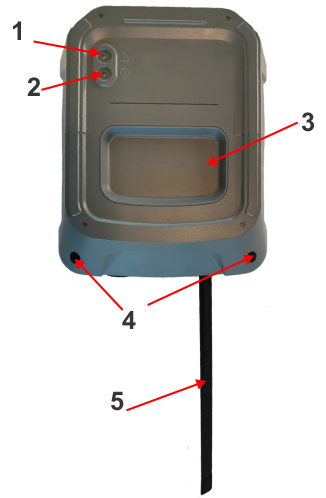
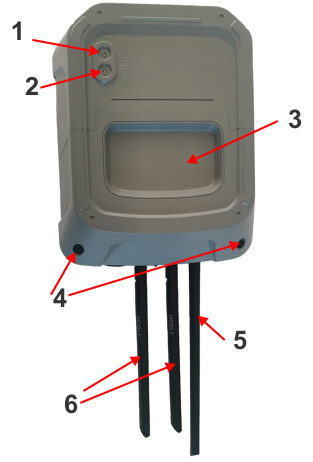
Base RTK wifi, descripción
general del producto
Nota: Esto se aplica al modelo 30915 únicamente.
G521073
-
LED de error
-
LED de posición
-
Cubierta delantera (se puede retirar
para poder acceder a los componentes interiores)
-
Tornillos para retirar la cubierta
delantera
-
Antena wifi
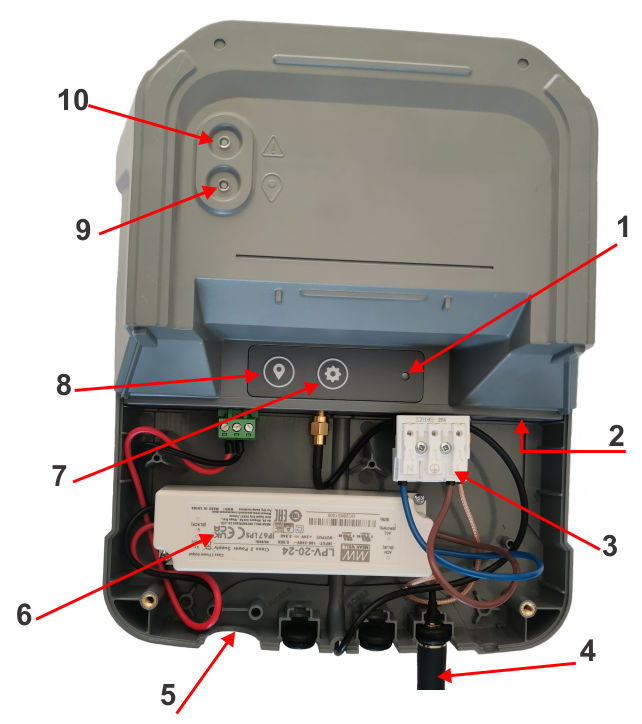
G521070
-
LED de configuración
-
Puerto Ethernet
-
Conector del suministro eléctrico
-
Antena wifi
-
Prensaestopas del cable de alimentación
-
Convertidor de CA/CC
-
Botón de configuración
-
Botón de determinación
automática de la posición
-
LED de estado de posición
-
LED de error
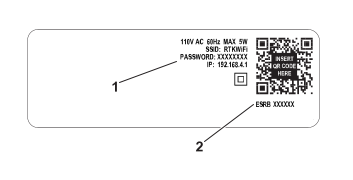
Para números serie de 324000000
a 324999999:
G539289
-
La contraseña inicial/predeterminada
de la conexión wifi de la base
-
El número de serie de la
base
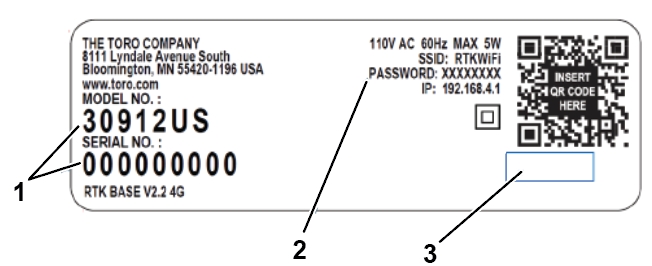
Para números de serie 325000000
y superiores: G542400
-
Número de modelo y de serie
del ID de la base
-
Contraseña inicial/predeterminada
para el ID de la base
-
Zona en blanco
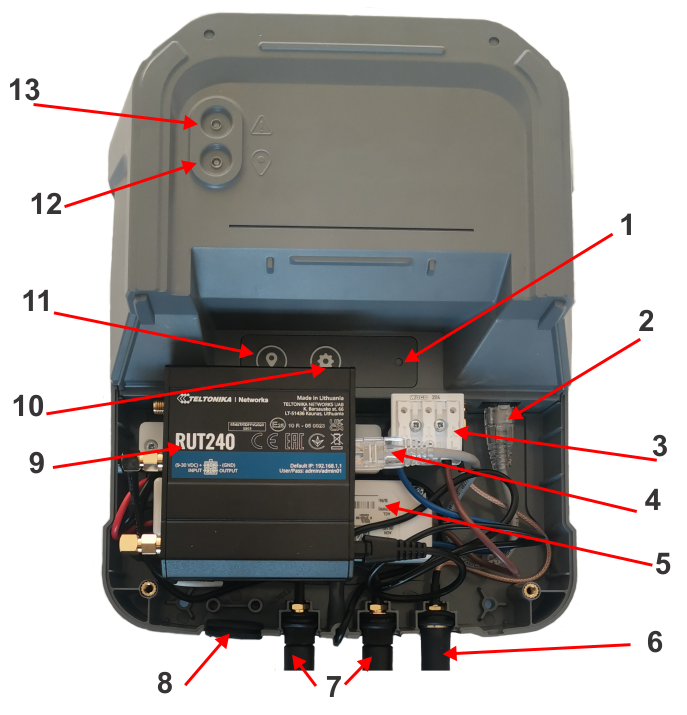
Base RTK 4G, descripción
general del producto
G521072
-
LED de error
-
LED de posición
-
Cubierta delantera (se puede retirar
para poder acceder a los componentes interiores)
-
Tornillos para retirar la cubierta
delantera
-
Antena wifi
-
Antenas de router 4G
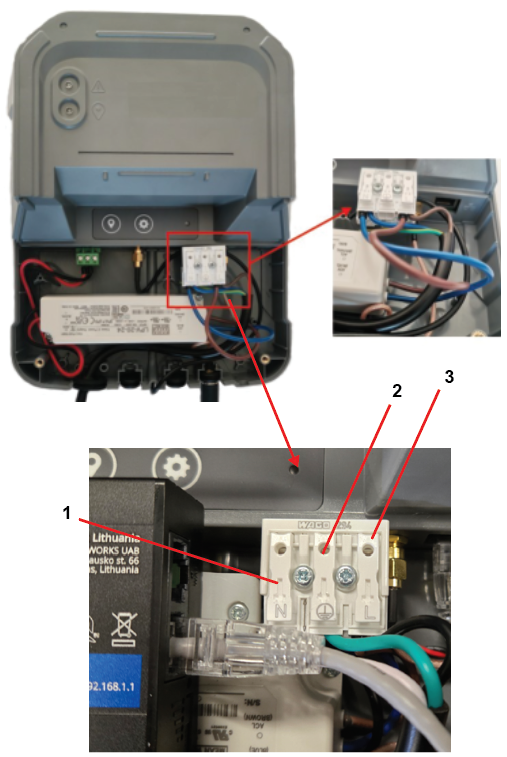
G521075
-
LED de configuración
-
Puerto Ethernet de la base
-
Conector del suministro eléctrico
-
Puerto Ethernet del router
-
Convertidor de CA/CC
-
Antena wifi
-
Antenas del router
-
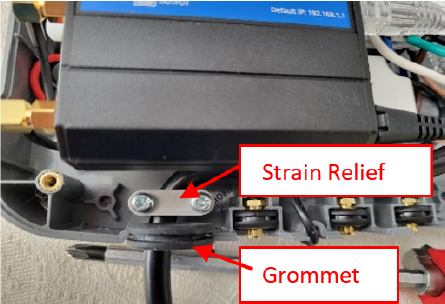
Prensaestopas del cable de alimentación
-
Router 4G
-
Botón de configuración
-
Botón de determinación
automática de la posición
-
LED de estado de posición
-
LED de error
El router 4G suministrado es Teltonika
RUT240, que está instalado en la caja de la base. El nivel de
señal móvil se puede ver en el lateral
superior.
Nota: El cable Ethernet debe conectarse al puerto LAN del router 4G.
Para números serie de 324000000
a 324999999:
G539289
-
La contraseña inicial/predeterminada
de la conexión wifi de la base
-
El número de serie de la
base
Para números de serie 325000000
y superiores: G542400
-
Número de modelo y de serie
del ID de la base
-
Contraseña inicial/predeterminada
para el ID de la base
-
Zona en blanco
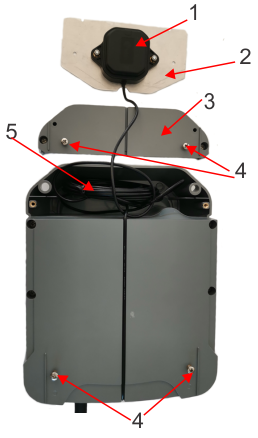
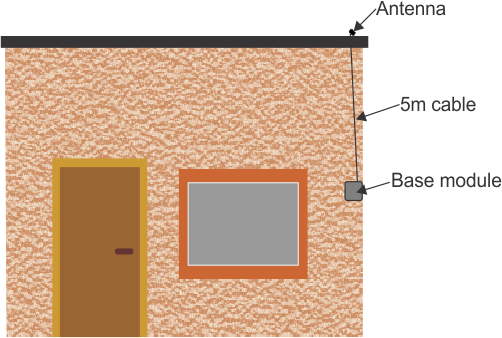
G520251
-
Antena GNSS
-
Placa base de la antena
-
Cubierta de la antena. Se puede
retirar para poder colocar la antena en una posición más
alta y recibir mejores señales de
satélite. La antena debe montarse plana sobre su placa base
-
Tornillos para colocar la base
en su placa de sujeción
-
Cable adicional de 5 m
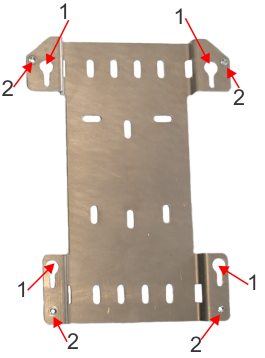
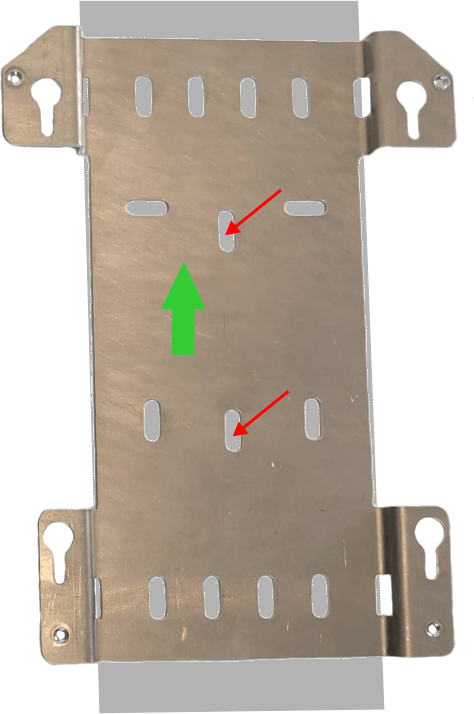
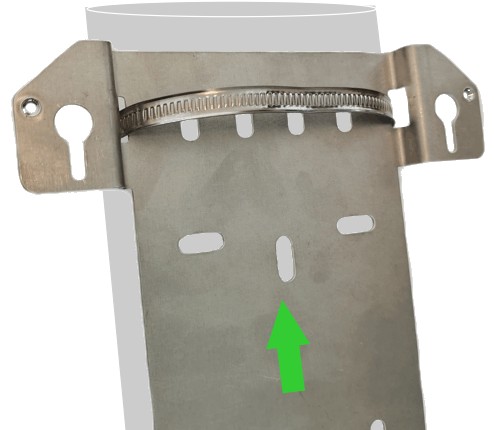
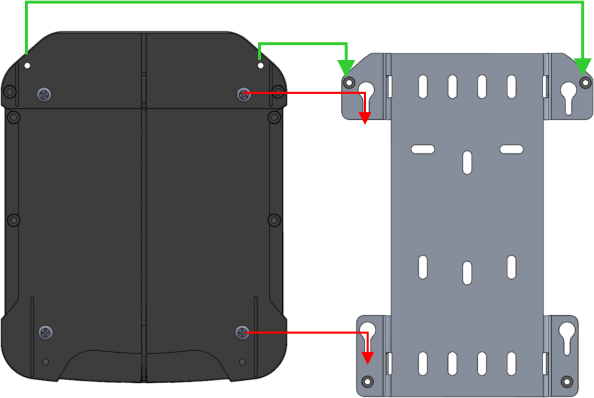
La placa de sujeción se suministra
para facilitar el montaje de la base en su soporte.
G520282
-
Ranuras para deslizar la base
en la placa
-
Taladros roscados para fijar la
base en el soporte
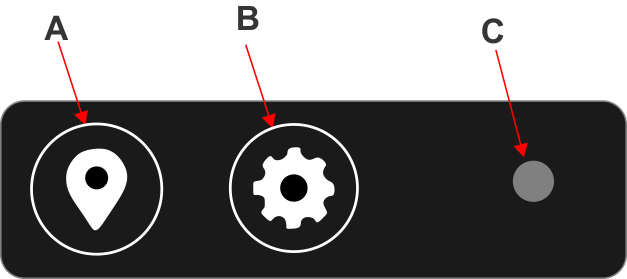
Utilización de la interfaz
de usuario
A. Botón de determinación
automática de la posición
Este botón inicia
un proceso de determinación automática, para establecer
la posición de referencia de la base.
B. Botón de configuración
Realiza
diferentes funciones, según los siguientes factores:
- Cuando se conecta un repetidor
wifi, al pulsarlo brevemente se configura el repetidor para que funcione
con la base.
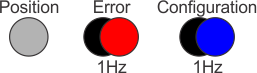
- Cuando parpadea la luz de error,
al pulsarlo brevemente, se obtiene información sobre el tipo
de error mediante el color del LED de configuración.
- Cuando se pulsa durante más
de 10 segundos, realiza un restablecimiento de los ajustes de fábrica.
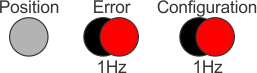
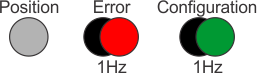
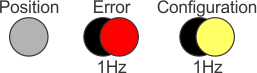
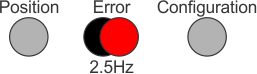
C. LED de configuración
Muestra
diferentes colores para indicar el tipo de error.
Herramienta de diagnóstico
de la base RTK
Esta herramienta se puede usar
con bases que tienen una versión de software 3.0 o posterior.
Ofrece información que puede ayudar a resolver
problemas relacionados con la base.
Requisitos previos:
- Un smartphone o un ordenador portátil
con wifi y una conexión a Internet.
- Debe encontrarse cerca de la base,
ya que debe conectarse al wifi de la base.
Acceso a la herramienta de diagnóstico
-
Encienda
la base RTK.
-
Si está
utilizando un smartphone, desactive la conexión móvil.
-
En el smartphone
o portátil, conéctese a la wifi de la base: RTKWi-Fi.
-
Introduzca
la contraseña de la conexión wifi. La contraseña inicial/predeterminada
está disponible en la etiqueta del lateral
de la estación base. Es necesario
cambiar la contraseña.
Nota: La contraseña DEBE incluir 8 caracteres.
Para números serie
de 324000000 a 324999999:
G539289
-
La contraseña inicial/predeterminada
de la conexión wifi de la base
-
El número de serie de la
base
Para números de serie
325000000 y superiores: G542400
-
Número de modelo y de serie
del ID de la base
-
Contraseña inicial/predeterminada
para el ID de la base
-
Zona en blanco
La contraseña
inicial/predeterminada aparece resaltada en la figura anterior y consta
de 8 caracteres. Si ha cambiado la contraseña,
escriba la nueva.
-
Abra un navegador
web y vaya a la página: http://192.168.4.1. Se abrirá la
página de diagnóstico de la base RTK. Las opciones
que se presenten depende de si la base utiliza
wifi o 4G.
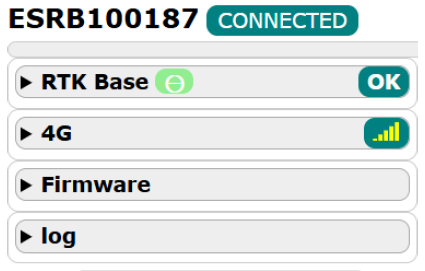
Descripción general
Número de serie de la base
- El número de serie de la
base, tal y como se muestra en la etiqueta.
Estado conectado
- Indica si la base está conectada
al dispositivo que está utilizando para acceder a la herramienta
de diagnóstico.
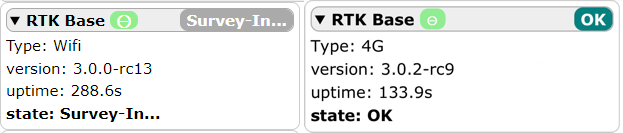
Base RTK
Esta página muestra información
sobre el estado actual de la base:
- LED de estado en tiempo real
- LED de posicionamiento (verde)
y error (rojo)
- Estado de funcionamiento de la
base
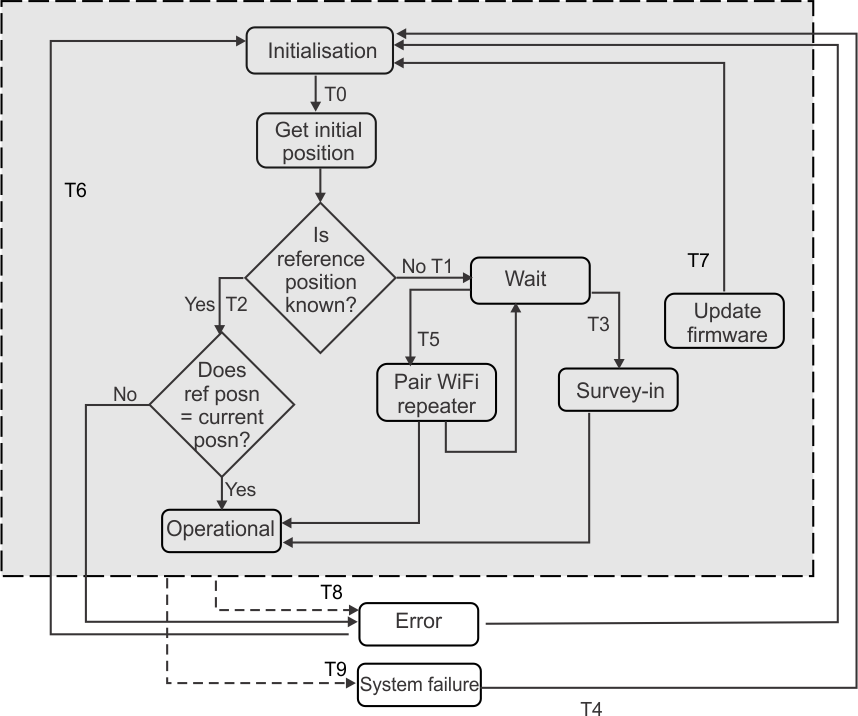
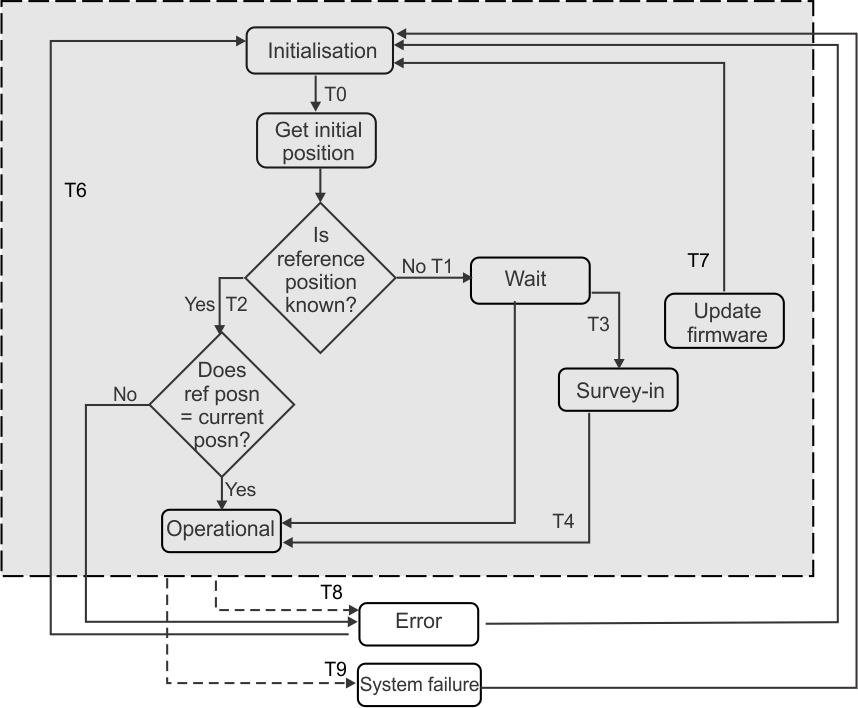
Esto muestra
el estado de funcionamiento actual de la base. Los valores posibles
son los siguientes:
- OK (Correcto)
- Initialization (Inicialización)
- Get initial position (Obtener
la posición inicial)
- Wait (Espera)
- Survey-In (Determinación
automática de la posición)
- Operational (Operativo)
- Error
- Pair Repeater (Emparejar repetidor)
- Update SW (Actualizar software)
Type (Tipo)
- El método utilizado para
transmitir las correcciones. Puede ser wifi o 4G.
Version (Versión)
- La versión actual del software.
Uptime (Tiempo de actividad)
- El número de segundos que
la base ha estado funcionando desde la última operación
de restablecimiento.
State (Estado)
- El estado de funcionamiento actual
de la base.
Si el estado
actual es de error, se muestra el tipo de error. Los valores posibles
son los siguientes:
- Position error (Error de posición)
- GNSS antenna error (Error de antena
GNSS)
- Survey-in error (Error de determinación
automática de la posición)
- Network error (4G) (Error de red
4G)
- System failure (Fallo del sistema)
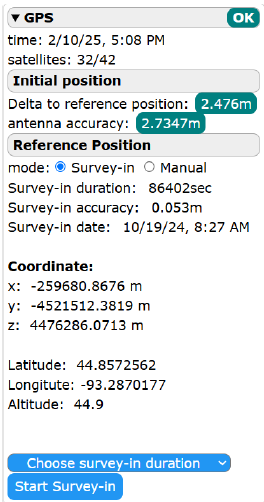
GPS
Esta página muestra información
sobre el rendimiento de GPS y la posición de referencia de la
base. Le permite determinar la posición
de referencia. Los detalles mostrados en esta página dependen
del estado de la base.
Status (Estado)
- Se refiere al estado general de
la base.
Time (Hora)
- La fecha (mm/dd/aaaa) y la hora
actuales.
Satellites (Satélites)
- El número de satélites
a los que está conectada la base o el número de satélites
disponibles. La base debe conectarse al menos
a 10 satélites. Si no es así, debe mover la antena.
Initial position (Posición
inicial)
- Este campo aparece cuando se ha
determinado una posición de referencia. La posición inicial
es la posición detectada cuando se
enciende la base.
Delta to reference position (Delta a posición
de referencia)
- El valor mostrado aquí es
la diferencia entre la posición de referencia y la posición
inicial. Debe encontrarse como máximo
a 7 m de la posición de referencia.
Antenna accuracy (Precisión
de la antena)
- Se trata de un factor que describe
la precisión de la base a la hora de determinar su posición.
Debe ser inferior a 1 m.
Reference Position (Posición
de referencia)
mode (modo)
- Esto ajusta el modo en el que
se establece la posición de referencia. Puede ser uno de los
siguientes:
- Survey-in (Determinación automática
de la posición): en este modo, la base determinará su propia
posición de referencia.
- Manual: en este modo, la posición
de referencia se define introduciendo las coordenadas que se determinaron
anteriormente.
Survey-in duration (Duración
de la determinación automática de la posición)
- Este campo aparece cuando se ha
determinado la posición de referencia. Es el periodo de tiempo
utilizado para la determinación automática
de la posición.
Survey-in accuracy (Precisión
de la determinación automática de la posición)
- Este campo aparece cuando se ha
determinado la posición de referencia. Muestra la precisión
al finalizar el proceso de la determinación
automática de la posición, que debe ser inferior a 7 m.
Survey-in date (Fecha de la determinación
automática de la posición)
- Fecha en la que se realizó
la determinación automática de la posición.
Coordinates (Coordenadas)
- Estos campos se muestran una vez
que se ha determinado la posición de referencia.
- X, Y, Z
Las coordenadas de la posición
de referencia, expresadas en términos del sistema ECEF (ECEF
(sistema de coordenadas centrado en la
Tierra y fijo en la Tierra).
- Latitude, Longitude, Altitude (Latitud, longitud,
altitud)
La coordenadas
de la posición de referencia, expresadas en términos del
sistema GCS (Sistema de Coordenadas Geográficas).
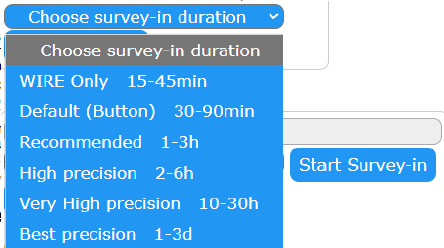
Choose survey-in duration (Elegir la duración
de la determinación automática de la posición)
Con
estas opciones, puede elegir el tiempo que dedicará al proceso
de determinación automática de la posición:
- Start Survey-in (Iniciar determinación
automática de la posición)
- Inicia el proceso con el que la
base determina su posición de referencia
Determinación de la posición
de referencia de la base
Este proceso se puede utilizar
si se necesita una nueva posición de referencia.
-
Marque la
opción del modo de Determinación automática de la posición.
-
Elija el
tiempo que se utilizará para el proceso. Cuanto mayor sea el
tiempo, más precisa será la determinación de la posición.
El menor tiempo disponible es WIRE Only 15-45min (Solo cable, 15-45 min) y se
puede utilizar si la instalación incluye un cable periférico.
-
Pulse Start Survey-in (Iniciar determinación automática
de la posición). La base contactará con los satélites
y determinará su posición de referencia.
La coordenadas actuales de la posición de referencia
se mostrarán en los campos en curso. El proceso continuará
hasta que la precisión sea inferior
a 7 m. Cuando haya transcurrido la cantidad mínima de tiempo,
se generará un error y el proceso
continuará durante dos periodos de tiempo más, transcurridos
los cuales se generará otro error. En este caso, será necesario
mover la base o su antena.
Ajuste manual de la posición
de referencia en una instalación 4G RTK
Con este procedimiento,
puede recuperar las coordenadas de la posición de referencia
que se determinaron durante el proceso de
descubrimiento y verificación. Se considera que la posición
de referencia de la base de ha desplazado si las coordenadas
actuales difieren en más de 7 m con respecto
a las coordenadas que se utilizaron para la posición de referencia.
En el caso de una instalación 4G RTK,
esta diferencia se detecta automáticamente en el robot y las
coordenadas originales se pueden recuperar
del robot. En el caso de una instalación de RTK que utilice
un cable periférico, la diferencia no se detecta ni se comunica
automáticamente y las coordenadas anteriores
se pueden recuperar en el portal web. Recuperar las coordenadas de
referencia originales presenta una ventaja,
porque significa que no tiene que ajustarse el mapeado que utiliza
el robot para calcular su patrón de funcionamiento.
-
En el robot,
seleccione el menú Technician (Técnico) (9) > Infrastructure
(Infraestructura) > Parcels (Parcelas) > 4G RTK
SUMMARY (Resumen de 4G RTK). Esto mostrará el mensaje
X RTK Base MOVED (Base X RTK desplazada).
-
Haga clic
en MOVED (Desplazada).
-
Haga clic
en 4G RTK Base (Base 4G RTK).
-
En la herramienta
de diagnóstico, marque la opción Manual mode (Modo manual).
-
Copie las
coordenadas que se muestran en la interfaz de usuario del robot.
-
Pulse Save (Guardar).
Ajuste manual de la posición
de referencia en una instalación RTK con cable
-
Vaya al portal
web turfpro.toro.com.
-
Seleccione
el robot en el que esté interesado y haga clic en Parameters (Parámetros).
-
Seleccione
la pestaña Robot Activity (Actividad del robot) y haga clic en L en la parte superior de la página.
-
En la columna
"Events" (Eventos), seleccione el tipo de evento "RTKSVinChange".
Se le presentarán los valores anteriores y
los nuevos de X, Y y Z.
-
Copie los
valores anteriores de X, Y y Z en la herramienta de diagnóstico.
-
Haga clic
en Save (Guardar).
-
Reinicie
el robot.
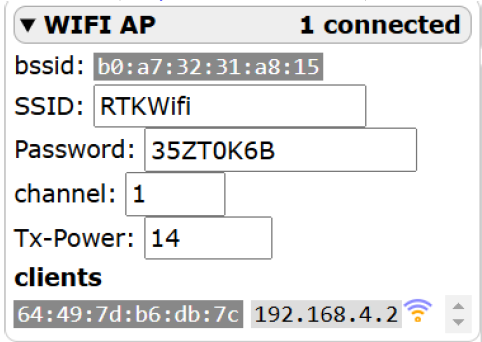
Punto de acceso wifi
Esta página ofrece información
sobre la conexión wifi de la base. También le permite cambiar
la contraseña de la conexión wifi y
el canal que se utiliza para la comunicación wifi.
{X} Connected ((x) conectados)
- El número de clientes (robots)
conectados a la conexión wifi de la base.
bssid
- El BSSID de la conexión wifi
de la base.
SSID
Password (Contraseña)
- Este campo mostrará la contraseña
si se ha establecido. Si el campo está vacío, significa
que no se ha definido ninguna contraseña.
En la siguiente sección se incluyen detalles sobre cómo
cambiar la contraseña. Es necesario
establecer una contraseña nueva.
Channel (Canal)
- Esta es la banda de frecuencia
wifi que utiliza la base RTK. El canal predeterminado es 1. Si el
robot determina que la cobertura de la
conexión wifi no es suficiente para todo el lugar y deja de funcionar
porque se pierde la señal GPS, puede deberse a
la presencia de otros dispositivos wifi cerca del lugar
que están interfiriendo con la comunicación entre la base
y el robot. En este caso, puede cambiar
el canal utilizado por uno que tenga más capacidad que el actual.
Wi-Fi Analyzer es una aplicación recomendada
para mostrar el uso de los canales wifi en las proximidades de la
base.
Si cambia el
canal, debe volver a emparejar el repetidor wifi.
El resto de
campos son para fines técnicos.
Cambio de la contraseña de
wifi
Tras cambiar la contraseña
de wifi, se perderá la conexión a la wifi de la base. Deberá
volverse a conectar a la base con la nueva
contraseña.
-
Haga clic
en el campo Password (Contraseña).
-
Escriba una
contraseña nueva. El color del fondo cambiará a naranja.
Nota: Debe contener al menos 8 caracteres.
-
Pulse Save (Guardar).
Nota: Se recomienda que anote la contraseña y la mantenga en un lugar
seguro.
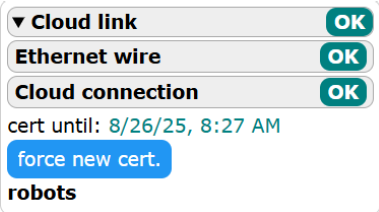
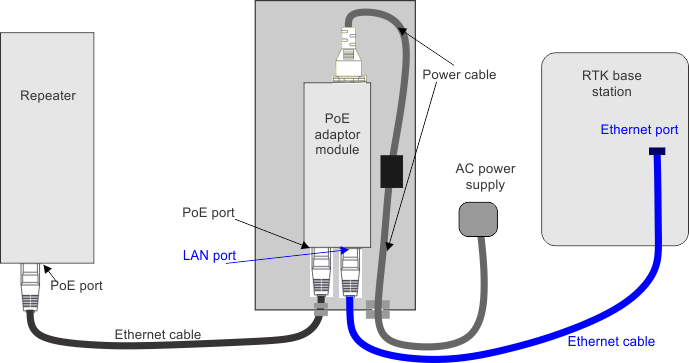
Enlace a la nube
Nota: Esta página está solo disponible si se está utilizando
4G para las correcciones de datos.
Esta página ofrece información
sobre la conectividad de la base al servidor web de la base RTK.
Cloud
link (Enlace
a la nube)
- El valor del estado que se muestra
aquí depende del estado de los dos campos mostrados a continuación.
Ethernet wire (Cable Ethernet)
- El cable Ethernet debe estar conectado
correctamente.
Cloud connection (Conexión
a la nube)
- Conexión al servidor web
de la base RTK.
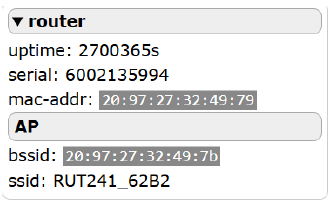
Router
Uptime (Tiempo de actividad)
- El tiempo en segundos desde que
se ha iniciado el router.
Serial (Serie)
- El número de serie del router.
Mac-addr (Dirección MAC)
- La dirección MAC del router.
AP
- El bssid y el ssid del router.
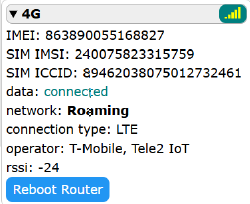
4G
Nota: Esta página está solo disponible si se está utilizando
4G para las correcciones de datos.
Signal level (Nivel de señal)
- La intensidad del nivel de la
señal 4G.
Uptime (Tiempo de actividad)
- El tiempo en segundos desde la
última vez que se reinició el router.
IMEI
- Esta información se muestra
con fines técnicos.
SIM IMSI
- Esta información se muestra
con fines técnicos.
SIM ICCID
- Esta información se muestra
con fines técnicos.
Network (Red)
- Esta información se muestra
con fines técnicos.
Connection type (Tipo de conexión)
Operator (Operador)
Reboot Router (Reiniciar router)
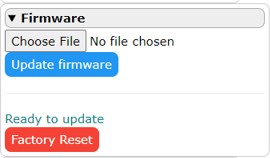
Firmware
Con esta página puede realizar
una actualización de software con un archivo binario y un restablecimiento
a los valores de fábrica. La versión
actual del software se puede ver en la página de la base RTK.
Choose file (Elegir archivo)
- Le permite realizar una actualizaciones
del firmware con un archivo binario. Esta opción no se admite
actualmente.
Update firmware (Actualizar firmware)
- Actualiza el firmware de la base.
Factory reset (Restablecimiento a los
valores de fábrica)
- Al pulsar este botón, se
realiza un restablecimiento de los ajustes de fábrica. Como resultado
de un restablecimiento a los valores de
fábrica:
- Se pierden todos los parámetros
de configuración
- Se pierde la posición de
referencia (determinación automática de la posición)
- En el caso de una base entregada
con una versión de firmware 3.0, la contraseña se restablecerá
a la predeterminada que se muestra
en la etiqueta
- En el caso de una base entregada
con una versión de firmware anterior a la 3.0, la contraseña
se borrará y se abrirá la conexión
wifi
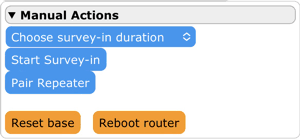
Acciones manuales
En esta página puede realizar
funciones sin que sea necesario acceder físicamente a los botones
de la base.
Choose survey-in duration (Elegir la duración
de la determinación automática de la posición)
Esto
le permite elegir la duración que quiere aplicar al proceso de
determinación automática de la posición. Aparece una
lista de opciones. Cuanto mayor sea la duración
elegida, mayor será la precisión con la que se determinará
la posición de referencia.
- “Wire Only 15-45min” (Cable solo 15-45 min) se puede
utilizar si la instalación incluye un cable periférico.
Start Survey-in (Iniciar determinación
automática de la posición)
- Esto inicia el proceso para determinar
la posición de referencia de la base. La base tiene que estar
en los estados de Espera, Operativo o Error.
Pair Repeater (Emparejar repetidor)
- Esto le permite emparejar la base
con un repetidor wifi. La base tiene que estar en los estados de Espera,
Operativo o Error.
Reset base (Restablecer base)
- Esto apaga la base y la vuelve
a encender. Se conservan todos los parámetros de configuración.
Reboot Router (Reiniciar router)
- Esto apaga el router 4G y lo vuelve
a encender. Se conservan todos los parámetros de configuración.
Esta operación es útil si está
bloqueado, por ejemplo, si no hay conexión a Internet.
Información sobre las Advertencias
de la Propuesta 65 de California
¿De qué tratan estas
advertencias?
Es posible que vea un producto
a la venta con una etiqueta de advertencia como la siguiente:
 |
ADVERTENCIA: Cáncer y daño reproductivo – www.p65Warnings.ca.gov. |
¿Qué es la Propuesta
65?
La
Propuesta 65 se aplica a cualquier empresa que opere en California,
que venda productos en California o que fabrique productos
que puedan venderse o llevarse a California. Estipula que
el gobernador de California debe mantener y publicar una lista de
sustancias químicas conocidas por causar cáncer,
defectos congénitos y/o daños reproductivos. La lista, que
se actualiza anualmente, incluye cientos de sustancias
químicas que se encuentran en numerosos artículos cotidianos.
La finalidad de la Propuesta 65 es informar al público
sobre la exposición a estas sustancias químicas.
La Propuesta
65 no prohíbe la venta de productos que contienen estas sustancias,
pero requiere la inclusión de advertencias
en cualquier producto, embalaje o documentación con el producto.
Por otro lado, la advertencia de la Propuesta 65 no significa
que un producto infrinja los requisitos o estándares
de seguridad de los productos. De hecho, el Gobierno de California
ha aclarado que una advertencia de la Propuesta
65 “no equivale a una decisión
normativa de que un producto sea ‘seguro’ o ‘no seguro’”. Muchas de estas sustancias se
han utilizado en productos de uso diario durante años sin documentar
ningún daño. Para obtener más información,
consultehttps://oag.ca.gov/prop65/faqs-view-all.
Una advertencia de la Propuesta
65 significa que una empresa (1) ha evaluado la exposición y
ha concluido que supera “el nivel de riesgo no significativo”, o bien (2) ha optado por proporcionar
una advertencia basándose en su comprensión sobre la presencia
de una sustancia química incluida en la lista
sin intentar evaluar la exposición.
¿Esta ley se aplica en todos
los lugares?
Las advertencias de la Propuesta
65 solo son obligatorias en virtud de la ley de California. Estas
advertencias se ven por toda California en una variedad
de entornos, incluidos a título enunciativo y no limitativo,
restaurantes, establecimientos de alimentación,
hoteles, centros educativos y hospitales, así como en una amplia
variedad de productos. Por otro lado, algunos minoristas
de venta online y por correo incluyen advertencias de la Propuesta
65 en sus sitios web y en sus catálogos.
¿En qué se diferencian
las advertencias y los límites federales en California?
Las normas
de la Propuesta 65 con frecuencia son más estrictas que las normas
federales e internacionales. Existen distintas sustancias
que requieren una advertencia de la Propuesta 65 a niveles mucho más
bajos que los límites federales. Por ejemplo,
el nivel exigido por la Propuesta 65 para las advertencias sobre
el plomo es de 0,5 μg/día,
que es muy inferior a lo que exigen las normas federales e internacionales.
¿Por qué no llevan la
advertencia todos los productos similares?
- Los productos vendidos en California
deben llevar el etiquetado de la Propuesta 65, mientras que otros
productos similares que se venden en otros
lugares no tienen que llevarlos.
- Es posible que a una empresa implicada
en un litigio sobre la Propuesta 65 que llegue a un acuerdo se le
obligue a utilizar advertencias de la Propuesta
65 en sus productos, mientras que otras empresas que fabriquen productos
similares puede que no tengan que cumplir
este requisito.
- La aplicación de la Propuesta
65 no es coherente.
- Las empresas pueden optar por
no ofrecer advertencias porque concluyan que no tienen que hacerlo
en virtud de la Propuesta 65; la falta de
advertencias para un producto no significa que el producto no contenga
sustancias químicas incluidas en la lista
en niveles similares.
¿Por qué Toro incluye esta advertencia?
Toro ha optado
por ofrecer a los consumidores el máximo de información
posible, para que puedan tomar decisiones informadas sobre
los productos que adquieren y utilizan. Toro ofrece advertencias en
algunos casos según su conocimiento de la presencia de una o
más sustancias químicas incluidas en la
lista, sin evaluar el nivel de exposición, ya que no todas las
sustancias químicas de la lista incluyen requisitos de límites
de exposición. Aunque la exposición que
provocan los productos de Toro puede ser insignificante, o estar
dentro de los límites de la categoría "sin riesgo significativo", Toro ha optado por incluir
las advertencias de la Propuesta 65 por simple precaución. Además,
si Toro no incluye
estas advertencias, podría enfrentarse a demandas interpuestas
por el Estado de California o bien por otras partes
que deseen aplicar la Propuesta 65, y la empresa podría enfrentarse
a importantes sanciones.