Den enkleste
måten å sikre at hver sone og dens grense klippes regelmessig,
er å implementere sekvensiell planlegging. Når
sekvensiell planlegging er implementert, vil roboten
arbeide i hver sone etter tur og klippe grensen når klippingen
er fullført. Roboten arbeider etter den
definerte arbeidsplanen.
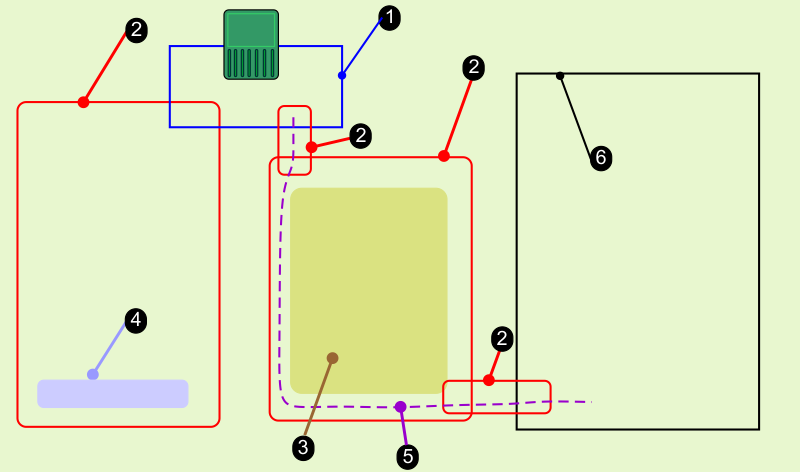
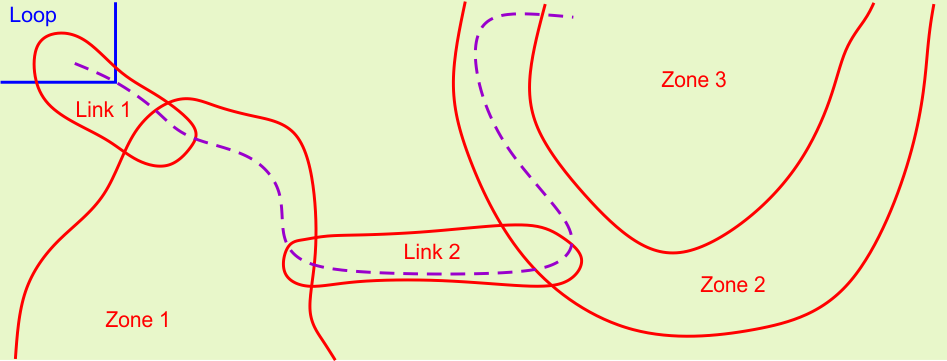
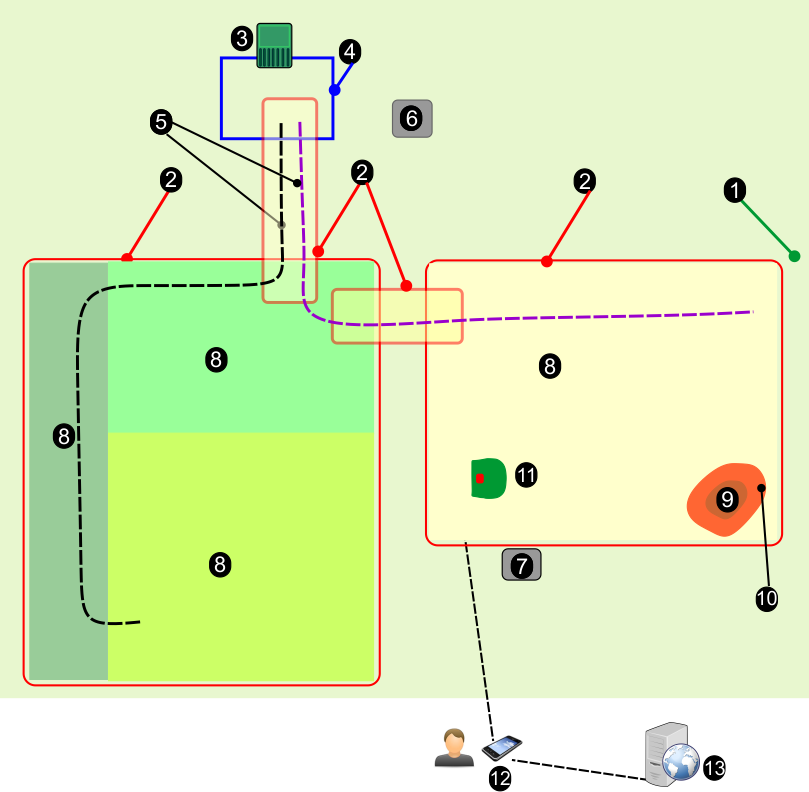
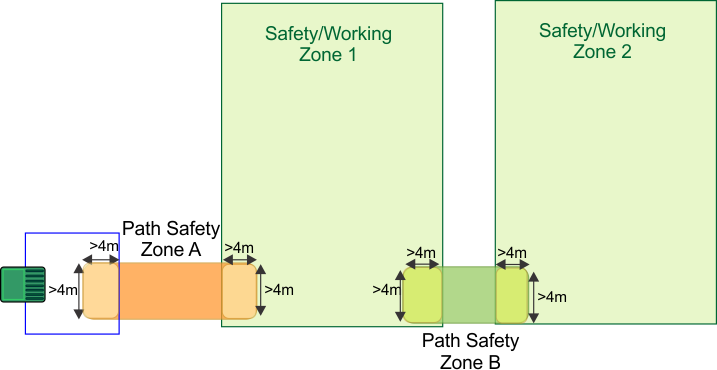
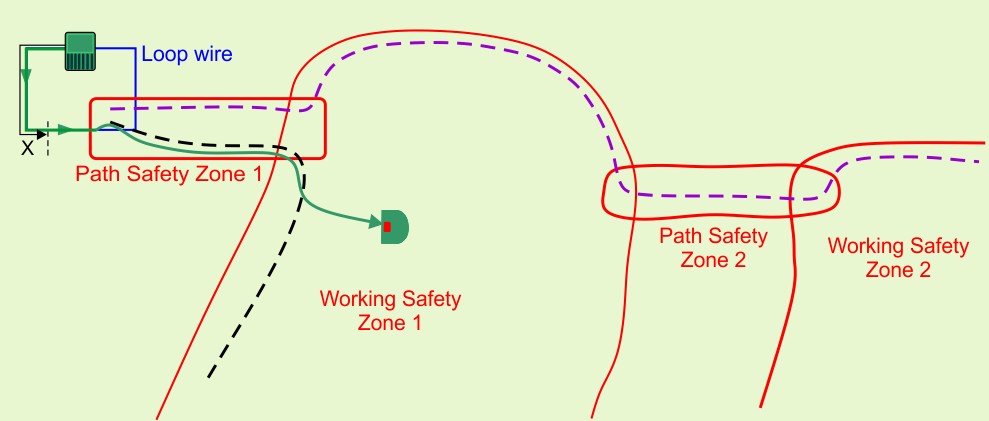
Prosessen med sekvensiell planlegging
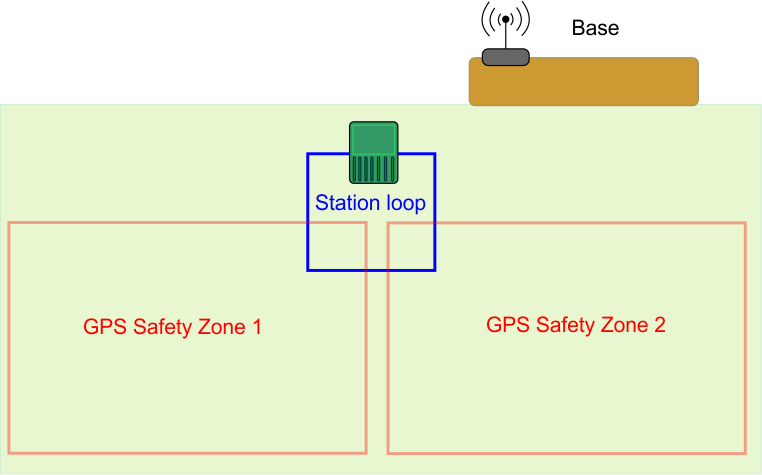
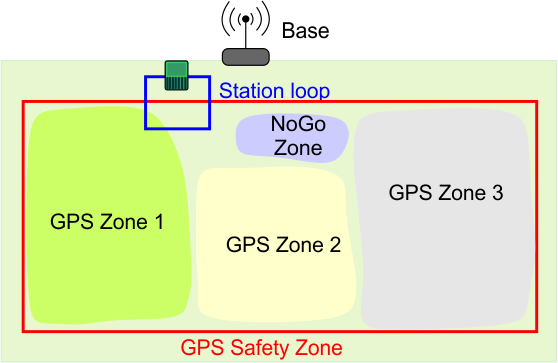
vises i figuren nedenfor. Vurder installasjonsoppsettet med tre separate
soner som skal klippes. Den definerte tidsplanen
tilsier at sone 2 og 3 er utilgjengelige på bestemte tider av
døgnet.
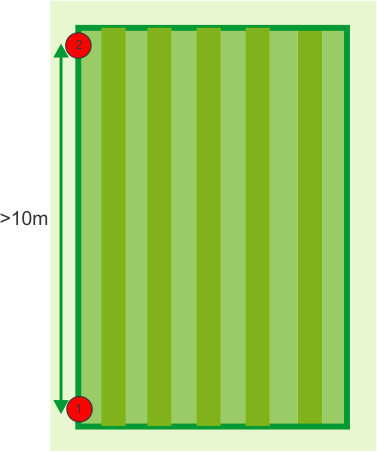
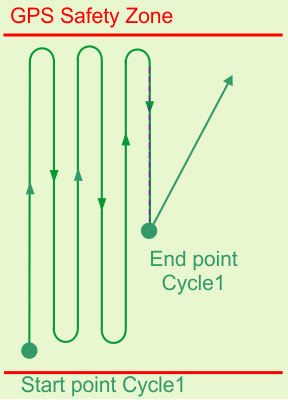
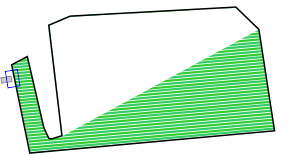
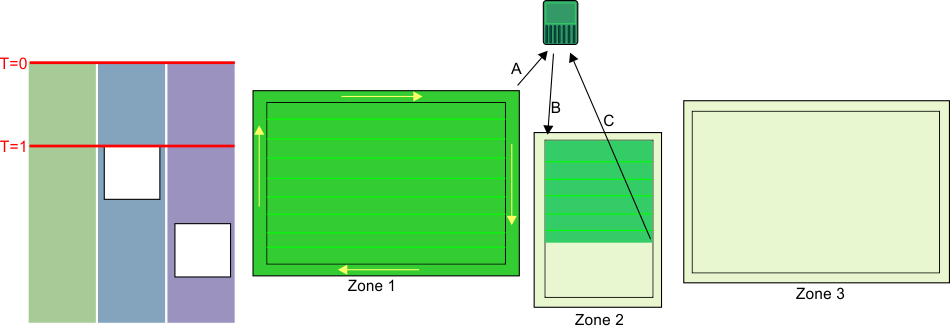
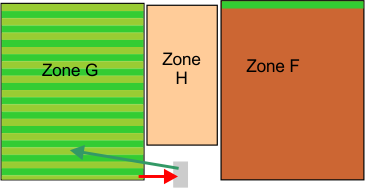
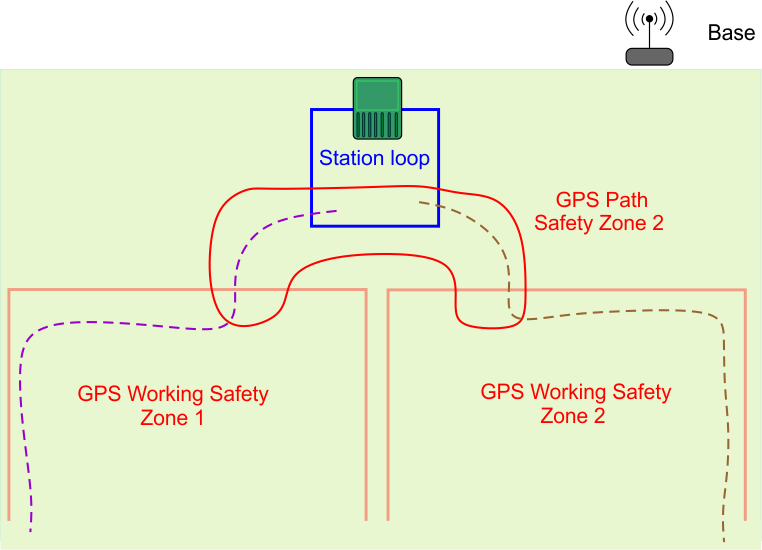
På tidspunktet T=0 begynner
roboten å klippe sone 1. Når hele området er klippet,
klipper den grensen og returnerer deretter
til stasjonen (A). Den flytter deretter til sone 2 (B), og klipper
til tidspunktet T=1, da den definerte tidsplanen tilsier
at sone 2 ikke er tilgjengelig. Roboten returnerer
til stasjonen (C).
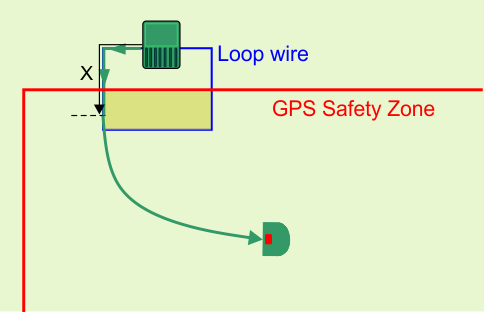
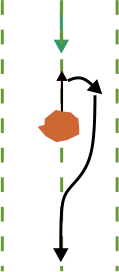
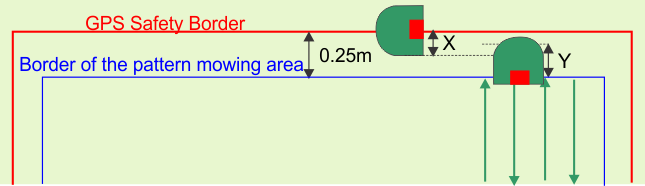
Merk: Ved klipping av grensen følger roboten samme retning som ble
brukt da grensen ble oppdaget.
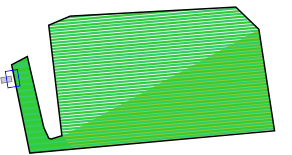
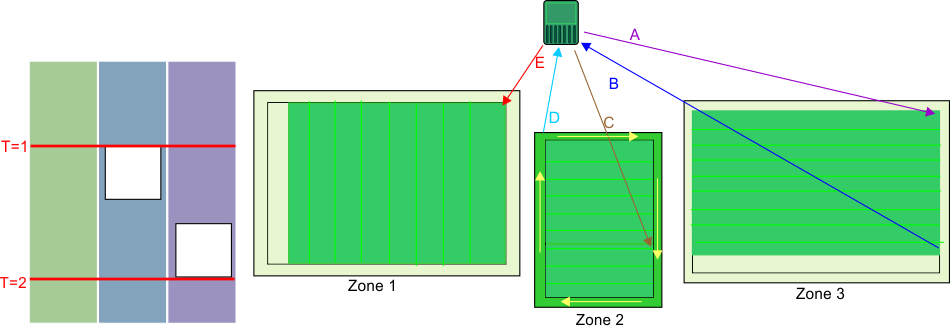
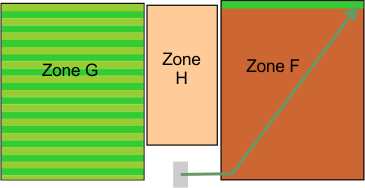
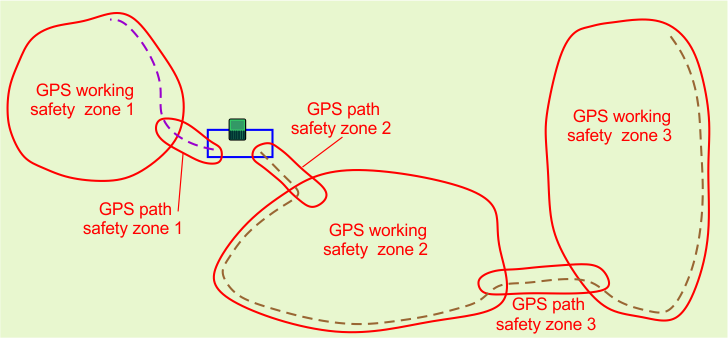
På tidspunktet T=1 vil roboten
flytte til sone 3 (A) og klippe der til tidsplanen tilsier at sone
3 ikke er tilgjengelig. Roboten vil gå
tilbake til stasjonen (B) og deretter returnere for å fullføre
klippingen av sone 2 (C). Når området er klippet,
vil den klippe grensen før den returnerer til
en stasjon (D). Siden sone 3 fortsatt ikke er tilgjengelig, vil den
flytte til sone 1 og begynne å klippe
i en ny retning (E).
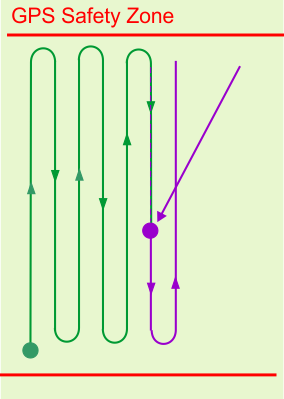
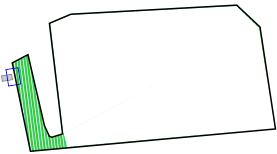
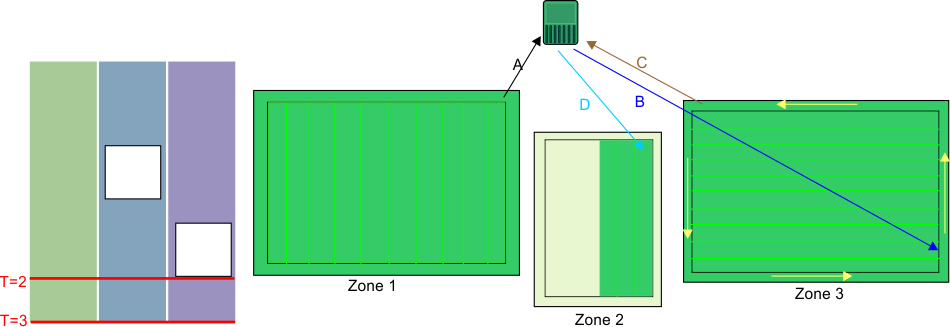
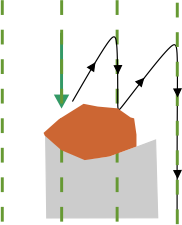
På tidspunktet T=2 er sone
1 ikke fullført når sone 3 blir tilgjengelig.
På tidspunktet T=2 vil roboten
fullføre klippingen av sone 1 og deretter klippe grensen før
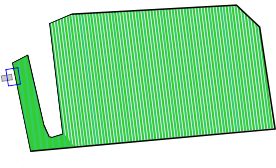
den returnerer til stasjonen (A). Den vil
da gå tilbake til sone 3 (B) og fullføre klippingen av sonen
og grensen. Den vil returnere til stasjonen (C) og deretter
begynne å klippe sone 2 i en ny retning (D).
Merk: Det anbefales på det sterkeste å bruke sekvensiell planlegging.
Hvis det ikke brukes, er det nødvendig å definere prosentandelen
av tiden som skal brukes på å
arbeide i en bestemt sone og å spesifisere eksplisitt antall
ganger per uke grensen skal klippes.