Installationskrav för 4G
RTK
4G RTK gör det möjligt
för roboten att arbeta inom ett område som inte definieras
av en begränsningskabel. Det här avsnittet
beskriver de olika kraven för robotdrift med 4G RTK.
Översikt över RTK GPS
- Standarddata för GPS-positionering
som hämtas från satelliter med GNSS (Global Navigation Satellite
System) har ett mätfel på mellan
5 och 10 meter. Detta beror på att signalen som tas emot
från en satellit förvrängs på grund av atmosfäriska
och miljömässiga förhållanden.
Positionering med högre precision kan uppnås med hjälp
av RTK-teknik (Real-Time Kinematic).
- Det innebär att en RTK-bas som är placerad på en fast
position används för att ta emot GNSS-signaler från
satelliter. Eftersom basen är fast är
de data som den tar emot kopplade till dess exakta plats.
- Robotarna är också utrustade
med antenner som tar emot GNSS-signaler från satelliter för
att bestämma sin position. Både RTK-basen
och robotarna tar emot GNSS-signalerna från satelliter
i olika konstellationer (GPS, GLONASS, Galileo, BeiDou). Bedömningen
av robotarnas position är dock mindre
exakt än för den fasta basen eftersom de rör sig.
- Korrigeringsdata för varje
satellit beräknas via en molnbaserad server och RTK-basen skickar
dessa till roboten. Roboten använder
dessa korrigeringar för att uppnå positionsnoggrannhet.
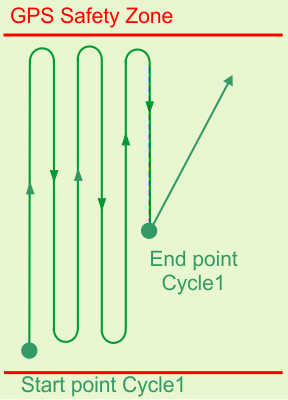
Tack vare den exakta positioneringen kan roboten följa ett definierat
mönster och täcka fältet
i en serie raka linjer.
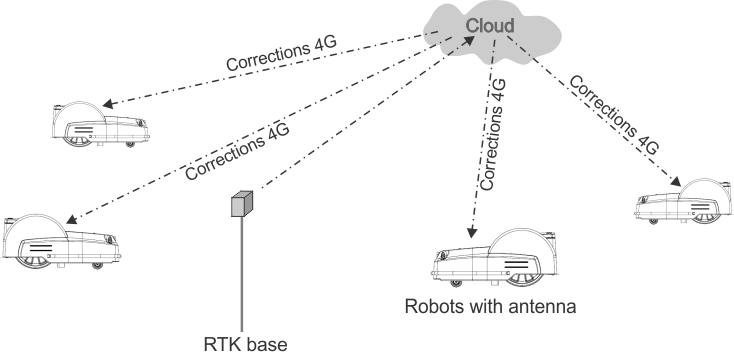
Korrigeringar
kan också göras via molnet via 4G-mobilnätet. I det
fallet finns inga hinder som stör överföringen av korrigeringsdata
och basen kan ansluta till ett obegränsat
antal robotar på avstånd på upp till 15 km.
Överföra korrigeringar
via 4G-mobilnätet
G520851
En basstation kan förse flera
robotar med korrigeringar, men varje robot får endast ta emot
korrigeringar från en basstation för
att se till att korrigeringarna är konsekventa.
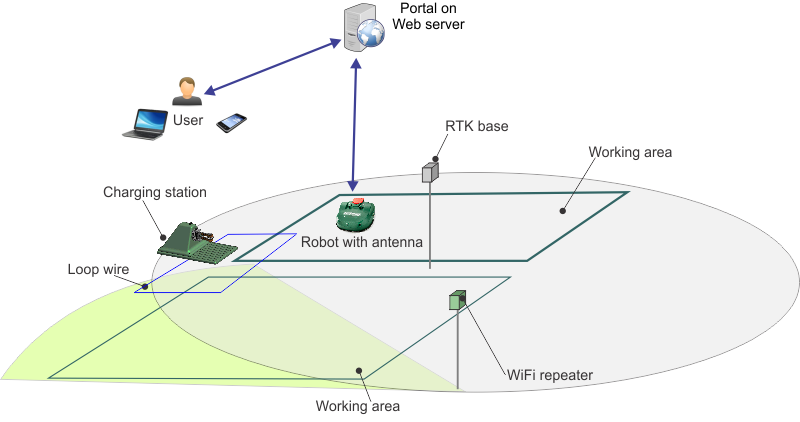
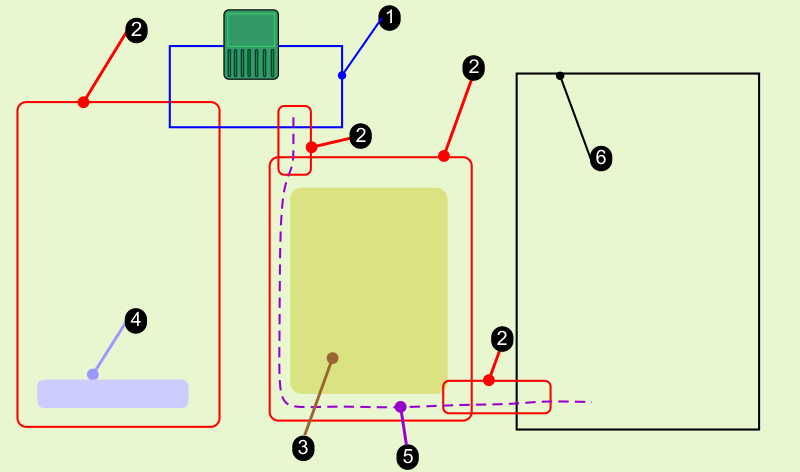
Grundkomponenter i RTK GPS-klippsystemet
G520852
I det här avsnittet beskrivs
robotens mekaniska egenskaper.
En användare kan styra roboten
direkt med hjälp av användargränssnittet. Efter att
en robot har registrerats på portalen som
körs på en webbserver:
- kan roboten skicka information
till servern som användaren kan se
- kan användaren skicka kommandon
till roboten, bedöma dess prestanda och justera konfigurationen.
Områdeskrav
GPS-signalkvalitet
Ett viktigt kriterium som
avgör om en plats är lämplig för en trådlös
installation är kvaliteten på GPS-signalen.
Obs! GPS-signalens kvalitet nära områdets gräns (längs
GPS-säkerhetszonens kant) måste vara 2.
För de områden där
GPS-signalen är otillräcklig kan trådbundna parceller
användas som en del av installationen. De kan kopplas
samman med andra arbetszoner och stationsslingan
med hjälp av navigeringsrutter.
GPS-signalens kvalitet
kan variera. Det beror på saker som väderförhållanden,
satellitkonstellationer och fältförhållanden.
Det är viktigt att du tar hänsyn till
detta när du bedömer platsen.
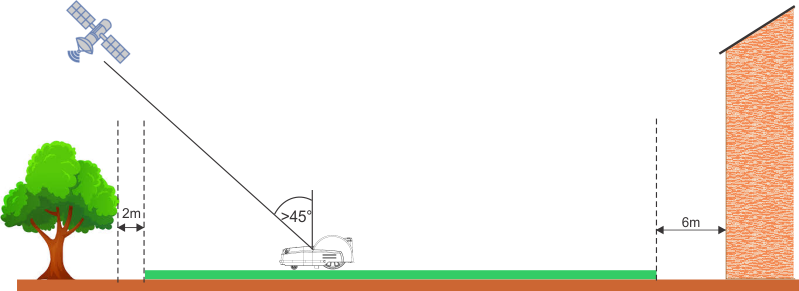
Fri sikt
Obs! Det är viktigt för en 4G RTK-installation att det finns
en fri sikt över hela området för robotarna och RTK-basen.
Träd och byggnader kan minska
signalnivån. Det är viktigt att komma ihåg att på
vintern, när träden är kala, kan du få en
signalnivå som är högre än
på sommaren när träden står i löv och när
roboten behöver arbeta.
Kritiska avstånd till byggnader
och träd visas i följande figur.
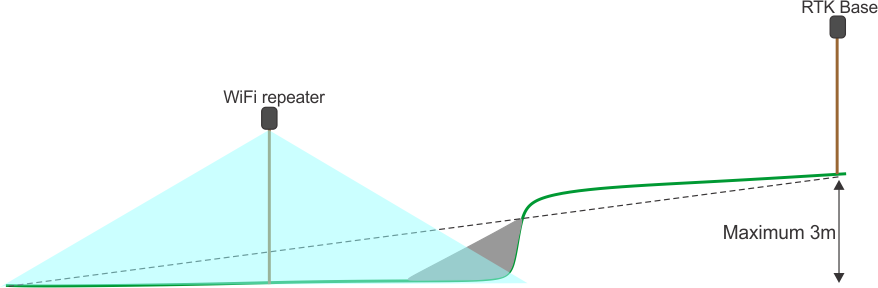
Sluttningar
Den maximalt tillåtna lutningen
vid GPS-gränsen är 30 % (17°) eller 45 %
(24°) för lutningsmodellversionerna (S).
Om korrigeringarna
av RTK-data överförs via Wi-Fi kan korta och branta backar
orsaka problem. Dessa kan orsaka en skugga som
döljer satellitsignalerna. I en sådan situation kan
en Wi-Fi-repeater eller 4G användas.
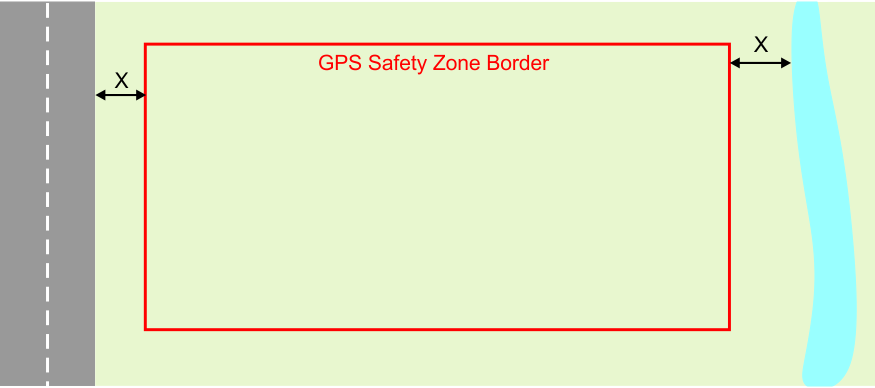
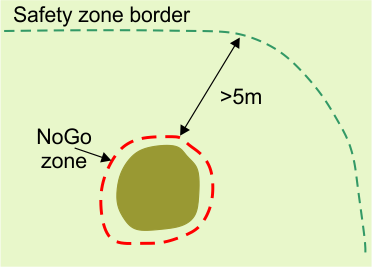
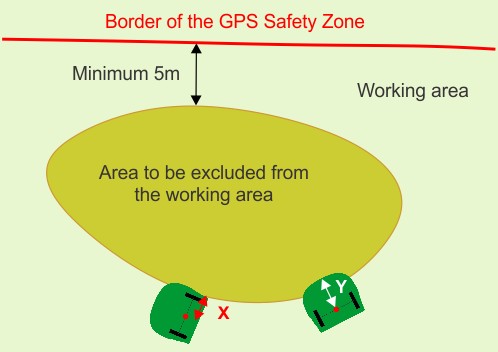
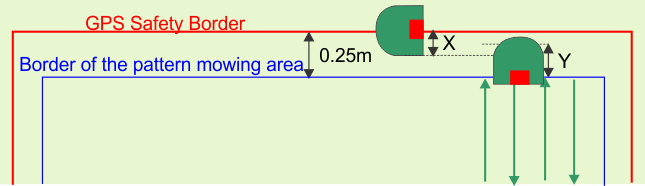
Avstånd från skadliga
inslag
Om avståndet
mellan ett skadligt inslag och GPS-säkerhetszonens gräns
(X) i följande figur är mindre än 8 m, måste
en fysisk barriär på minst 15 cm
i höjd installeras.
Farliga inslag är bland annat
vägar och vatten.
Form och storlek
Områdets form och storlek
är mindre viktig än säkerhetszonens komplexitet inom
det området. Beräkningen av GPS-rutten beror
på det övergripande arbetsområdet, dess
form och om det innehåller komplexiteter som smala passager,
hinder och förbjudna zoner. Stora och
komplexa områden kan hanteras genom att använda flera säkerhetszoner.
Krav på GPS-signal
Problem i installationen
kan innebära att roboten inte tar emot en GPS-signal med tillräckligt
hög kvalitet. De signalnivåer som krävs
för olika driftsmoment listas i följande avsnitt, tillsammans
med de åtgärder som roboten vidtar när signalen är
för låg för det nödvändiga
driftsmomentet.
Signalkvalitetsnivåer kan
visas i Teknikerns meny (9) > GPS RTK (Technician's menu
(9) > GPS RTK).
Gränsdetektering via fjärrkontroll
Erforderlig signalnivå: => 2.
Robotåtgärder: Inga
Ett meddelande
tas emot i smarttelefonappen som informerar användaren om att
punkten inte kan registreras.
Kontroll av gränser
Erforderlig signalnivå: => 2.
Robotåtgärder: efter 10 minuter
utfärdar roboten följande meddelande: ”Exakt position förlorad.
Kontrollera anslutningen med referensbasstationen.” (”Precise position lost. Check connection
with reference base station.”)
GPS-navigering
Detta driftsmoment syftar på
att roboten använder GPS-navigering för att lämna eller
återvända till stationen med eller utan
förbjudna zoner.
Erforderlig signalnivå: => 2.
GPS-signalens
kvalitetsnivå måste vara => 2.
Robotens åtgärder:
- Efter 5 minuter startar roboten
om RTK-modulen.
- Efter 30 minuter roterar
roboten sig själv för att bättre rikta in antennen
mot satelliterna.
- Efter 3 timmar utlöses
ett larm.
Lämna stationen för
arbete med mönster
Detta syftar på att roboten
lämnar stationen längs stationens slingkabel.
Krav på signalnivå: > 1,2.
Robotens
åtgärder:
- Efter 5 minuter startar roboten
om RTK-modulen.
- Efter 3 timmar utlöses
ett larm.
Lämna stationsslingan för
att börja arbeta
Detta syftar på att roboten
lämnar stationens slingkabel och börjar arbeta i mönsterläge.
Erforderlig
signalnivå: => 2.
Robotåtgärder: efter 10 minuter
återvänder roboten till stationen med hjälp av stationens
slingkabel och försöker starta uppgiften igen.
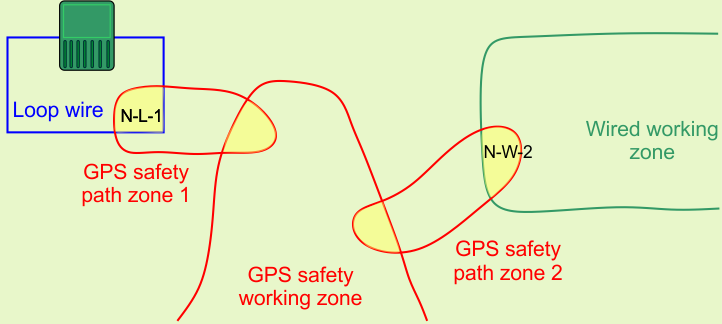
4G RTK GPS-zoner
När det inte finns en fysisk
begränsningskabel definieras arbetszoner av GPS-koordinater.
G527699
-
Slingkabeln.
-
GPS-säkerhetszoner. Dessa
omfattar robotens hela arbetsområde och kan omge interna arbetsområden
eller rutter.
-
Interna GPS-zoner där roboten
kan arbeta vid olika tidpunkter och under olika förhållanden.
-
Förbjudna zoner där
roboten inte får arbeta.
-
En rutt som ligger inom en GPS-säkerhetszon.
-
En trådbunden zon som kan
användas i områden där GPS-signalen är otillräcklig
för en 4G RTK-zon.
Områdesplan
Området som roboten arbetar
i definieras genom GPS-säkerhetszoner vars gränser definieras
antingen med en begränsningskabel eller
4G RTK. Vidare kan interna GPS-arbetszoner skapas för att styra
klippfrekvens, mönster eller annan användarinmatning.
Stationens slingkabel
Du måste använda
en slingkabel för stationen för att roboten ska kunna komma
åt laddstationen och droppgropsstationen. Om
du använder fler än en bollplockande robot, kan
en upptagen-slinga behövas.
GPS-säkerhetszonen
Detta definierar
den omgärdande gränsen av robotens arbetsområde som
representerar motsvarigheten till begränsningskabeln.
Det är ytterst viktigt att roboten inte rör
sig utanför denna zon.
- Minst en zon måste konfigureras
och betecknas som GPS-säkerhetszon.
- En säkerhetszon kan användas
för att avgränsa ett arbetsområde eller en rutt.
- Flera säkerhetszoner kan
definieras. De måste överlappa varandra i navigeringssyfte.
- Minst en måste överlappa
stationens slingkabel.
- Säkerhetszonen definieras
av ett förfarande för att detektera gränserna. Efter
detekteringen krävs det att säkerhetszonen
måste verifieras och sedan bekräftas.
- GPS-säkerhetszonen kan endast
definieras av en användare med användarrollen Tekniker på
webbportalen.
- De konfigurationsparametrar som
används för att definiera säkerhetszonen registreras.
Alla ändringar av dessa parametrar kräver
verifiering och bekräftelse.
- Om några ändringar av
parametrarna upptäcks (t.ex. om baspositionen har ändrats)
eller om anslutningen till basstationen förloras,
kommer roboten att sluta fungera.
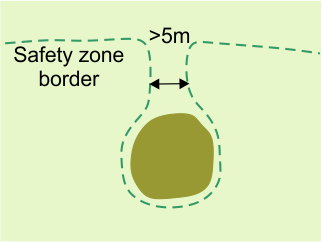
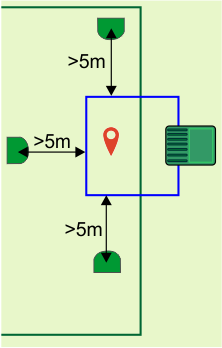
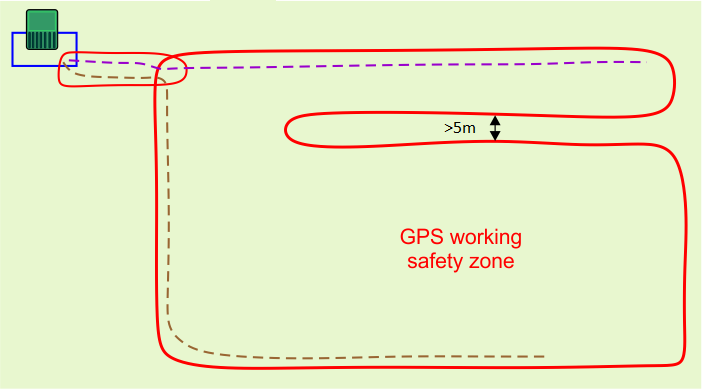
- Om en zon innehåller en smal
passage mellan säkerhetszonens kanter måste passagen vara
minst 5 m bred.
Interna GPS-arbetszoner
- Du kan definiera valfritt antal
interna GPS-arbetszoner för att optimera robotdriften. Definiera
zoner där roboten arbetar vid särskilda
tidpunkter och frekvenser.
- Klipphöjden i de olika zonerna
är densamma som den som ställts in för den omgivande
säkerhetszonen.
- Alla dessa interna zoner måste
ligga inom den övergripande GPS-säkerhetszonen.
- De behöver inte definieras
genom ett förfarande för att detektera gränserna. De
kan definieras och redigeras på webbportalen
av alla användartyper som har tillgång till
roboten.
Förbjudna zoner
Förbjudna zoner är
områden, vanligtvis runt hinder, där roboten inte får
gå in.
- Förbjudna zoner måste
definieras genom ett förfarande för gränsdetektering.
- De kan endast definieras eller
ändras av användare med rollen Tekniker.
- Gränsen måste verifieras
och bekräftas.
- Förbjudna zoner måste
vara minst 5 m från säkerhetszonens kant och från
varandra.
- Förbjudna zoner måste
vara minst 1 m breda i alla riktningar.
- Långa förbjudna zoner
måste vara minst 5 m breda.
GPS-rutter
Rutter är ett användbart
och effektivt sätt att ansluta separata arbetszoner. Dessa arbetszoner
kan vara trådbundna parceller eller 4G
RTK-zoner. Det finns ingen gräns för hur många zoner
som kan kopplas samman med rutter.
Trådbundna parceller
Trådbundna
parceller kan användas för de områden där GPS-signalens
kvalitet är otillräcklig för att en 4G RTK-zon ska
kunna definieras.
Station och slinga
Minst en slingkabel måste
installeras runt stationen för att roboten ska kunna lämna
och återvända till stationen. En GPS-zon
måste överlappa stationens slingkabel. Även om
installationen kan innehålla flera GPS-säkerhetszoner (och
trådbundna parceller), behöver bara
en överlappa stationsslingan, även om flera zoner kan överlappa
den.
Det här avsnittet definierar
de kritiska måtten som är associerade med slingan för
en 4G RTK-installation.
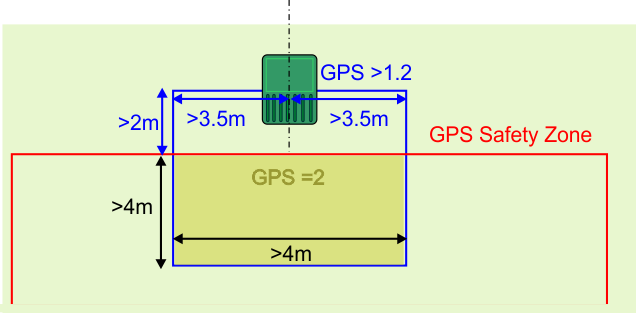
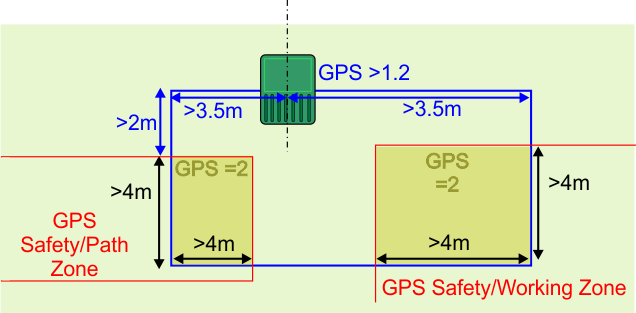
En slinga med en GPS-säkerhetszon
Följande villkor gäller:
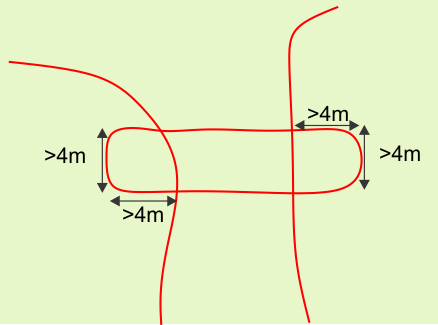
- Stationsslingan måste överlappa
GPS-säkerhetszonen och ställas in som dess angränsande
parcell.
- Stationsslingan måste överlappa
GPS-säkerhetszonen med minst 4 m i båda riktningarna.
- Signalnivån som roboten detekterar
när den är vid stationen måste vara minst 1,2.
- Signalnivån inom det överlappande
området måste vara 2.
- Längden på den raka
kabeln på inkommande och utgående sidor måste vara
> 3,5 m.
- Avståndet mellan stationen
och GPS-säkerhetszonen (bredd) måste vara > 2 m.
En
GPS-returpunkt måste definieras inom det överlappande området.
En slinga med flera GPS-säkerhetszoner
Flera säkerhetszoner
kan anslutas till slingkabeln. Det kan vara flera arbetszoner eller
de säkerhetszoner som omger rutter.
Följande villkor gäller:
- Stationsslingan måste överlappa
varje GPS-säkerhetszon. Var och en måste ställas in
som en angränsande parcell till slingan.
- Stationsslingan måste överlappa
varje GPS-säkerhetszon med minst 4 m i båda
riktningarna.
- Signalnivån som roboten detekterar
när den är vid stationen måste vara minst 1,2.
- Signalnivån inom det överlappande
området måste vara 2.
- Längden på den raka
kabeln på inkommande och utgående sidor måste vara
> 3,5 m.
- Avståndet mellan stationen
och GPS-säkerhetszonen (bredd) måste vara > 2 m.
- Du måste definiera en mekanism
för att roboten ska kunna ta sig till stationsslingan. Det kan
vara en GPS-returpunkt eller en rutt.
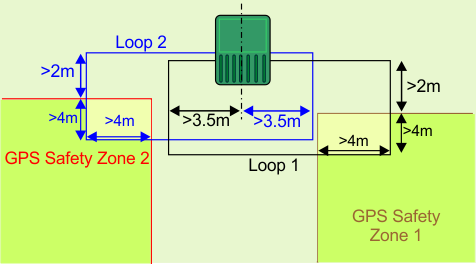
Flera slingor
När flera slingor är
anslutna till stationen är kraven på signalnivåerna
desamma som för en slinga enligt föregående avsnitt.
Mått för placering av flera slingkablar
visas nedan.
- Varje slinga måste överlappa
sin GPS-säkerhetszon och ställas in som dess angränsande
parcell.
- Stationsslingan måste överlappa
GPS-säkerhetszonen med minst 4 m i båda riktningarna.
- Signalnivån som roboten detekterar
när den är vid stationen måste vara minst 1,2.
- Signalnivån inom det överlappande
området måste vara 2.
- Längden på den raka
kabeln på inkommande och utgående sidor av varje slinga
måste vara > 3,5 m.
- Avståndet mellan stationen
och GPS-säkerhetszonen måste vara > 2 m.
- En GPS-returpunkt måste definieras
inom varje överlappningsområde.
- Använd inte angränsande
signalkanaler för de olika stationsslingorna.
- Ledningar får inte tvinnas.
- Varje slinga ska vara en enda
kabel.
- Ledningarna för slinga 1
och slinga 2 kan placeras i samma spår i marken för laddarens
in- och utgång.
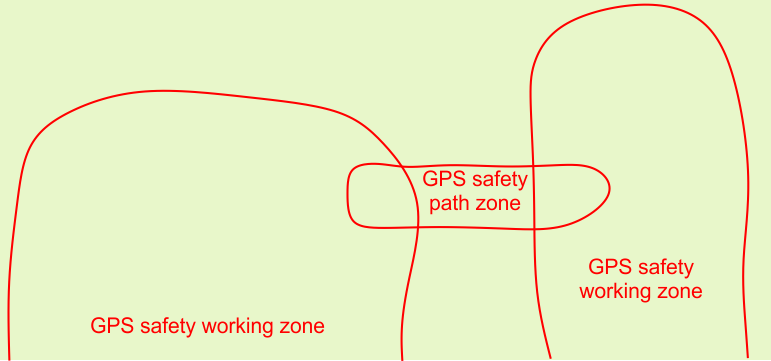
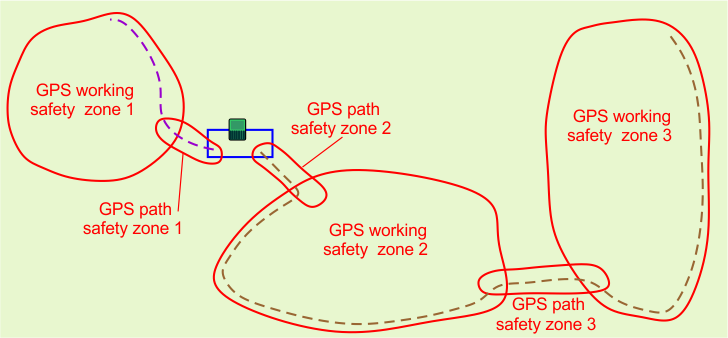
Krav avseende rutter
Rutter är ett användbart
och effektivt sätt att ansluta separata arbetszoner. Dessa arbetszoner
kan vara trådbundna parceller eller 4G RTK-zoner.
Det finns ingen gräns för hur många zoner som kan kopplas
samman med rutter.
Rutter måste vara inneslutna
inom en GPS-säkerhetszon
I föregående figur skapades
en specifik GPS-säkerhetszon för att omsluta rutten som
länkar samman de två GPS-zonerna.
Vi rekommenderar
att du skapar separata säkerhetszoner för rutterna. En GPS-signalnivå
på 2 krävs i det område där zonen ska
skapas.
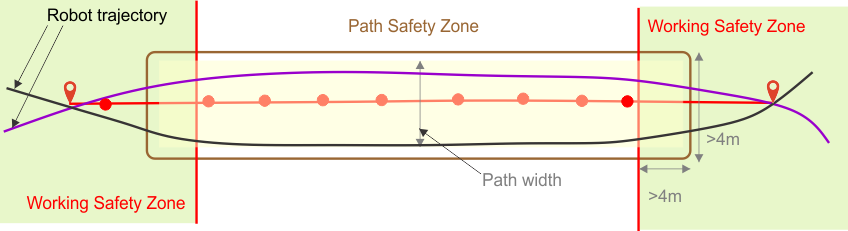
En rutt har en definierad bredd.
Det minsta värdet är robotens bredd. Det maximala värdet
är 10 m. När roboten navigerar längs
rutten tar den en slumpmässig väg mellan
början och slutet av banan för att minska risken för
att spår uppstår i gräset.
Bredden på den omgivande
zonen måste inrymma rutten. Notera att roboten aldrig kommer
att gå utanför den omgivande zonen,
även om ruttens bredd skulle tillåta det. Rutter gör
det möjligt för roboten att navigera längs relativt
smala passager.
Den maximala hastigheten och klipphuvudenas
funktion när roboten navigerar längs rutten kan konfigureras
så att zoner kan förbindas med smala
och svåra passager.
Dessa GPS-säkerhetszoner
för rutterna skapas och detekteras på samma sätt som
alla GPS-säkerhetszoner.
Rutter måste överlappa
zonerna de binder samman
Enligt figuren ovan överlappar
ruttzonen båda arbetszonerna. Storleken på överlappningen
måste vara minst 4 m × 4 m.
Om ruttzonen överlappar en
GPS-säkerhetszon behöver du inte ställa in zonerna
som angränsande.
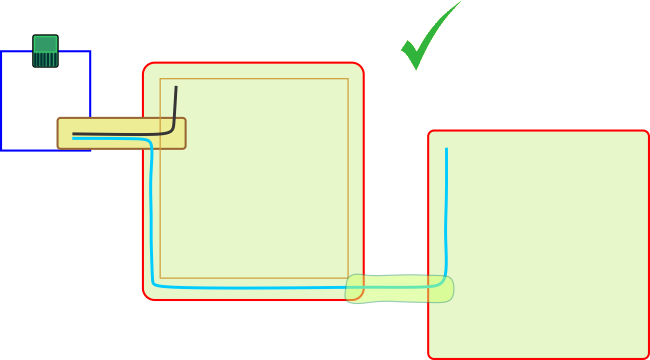
Rutter kan ansluta trådlösa
och trådbundna parceller
Rutter kan användas för
att ansluta trådlösa och trådbundna zoner. I alla 4G
RTK-installationer måste stationen vara omgiven
av en slingkabel.
Det är också möjligt
att använda trådbundna arbetszoner för de områden
där GPS-signalnivån inte är tillräckligt hög
för att använda en 4G RTK-zon
I samtliga fall måste ruttzonerna
överlappa arbetszonerna med en överlappning på 4 m × 4 m.
När
en ruttzon överlappar en trådbunden zon måste ruttzonen
ställas in som angränsande parcell enligt figuren ovan.
Om GPS-ruttzonerna överlappar andra GPS-säkerhetszoner
behöver de inte ställas in som angränsande.
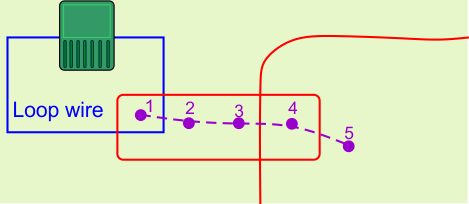
Detektera rutter
Rutter är en serie GPS-brytpunkter.
Dessa definieras av ett detekteringsförfarande som när du
detekterar en zongräns. Följande
villkor gäller:
- Vid detektering av en rutt som förbinder slingparcellen måste den
första punkten som ska detekteras ligga i överlappningsområdet
mellan slingans kabel och GPS-ruttens säkerhetszon.
- Den andra punkten måste placeras
utanför slingans kabel.
- Lägg inte till för många
punkter när du detekterar en rutt. På raka avsnitt räcker
det med ett avstånd på 3 till 4 m mellan
punkterna. På böjda avsnitt ska punkterna
ligga närmare varandra. Genom att begränsa antalet punkter
kan roboten navigera snabbt och smidigt.
- Minst en punkt på rutten
måste ligga i de överlappande zoner som den binder samman.
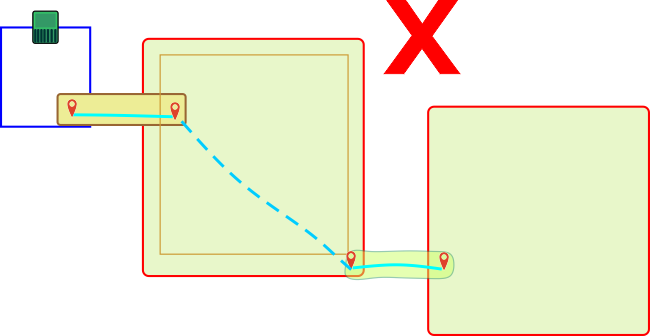
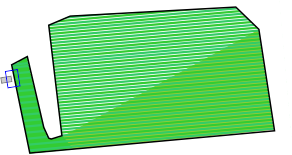
Ruttdesign
När du skapar rutter är
det bättre att använda enstaka långa rutter i stället
för segmenterade rutter. Detta illustreras i
följande figur.
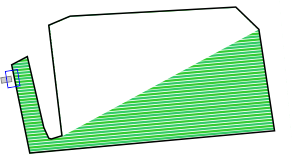
Segmenterade rutter rekommenderas
inte eftersom roboten kommer att använda GPS-navigering för
att flytta från slutet av ena rutten
till början av den andra. Detta kommer sannolikt att skapa spår
i gräset eftersom roboten alltid kommer att följa exakt
samma bana.
Vi rekommenderar också att
rutterna sträcker sig långt in i målarbetszonen. Detta
förbättrar navigeringen avsevärt för roboten
när den behöver återvända
till stationen.
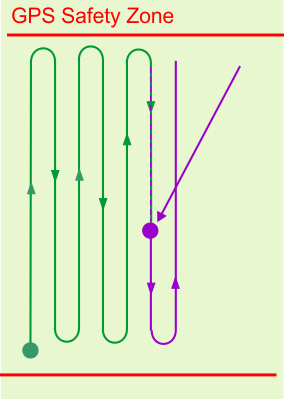
Flera rutter kan konfigureras
i samma zon. Roboten kommer automatiskt att optimera banan enligt
de tillgängliga rutterna och målzonen.
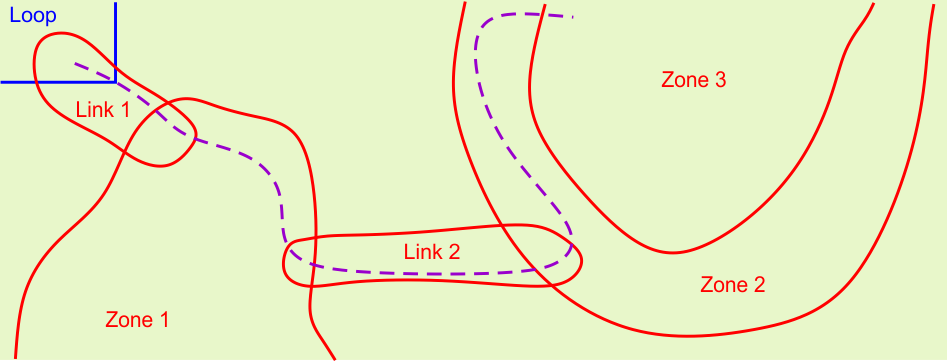
Automatisk detektering av ruttzoner
Rutten som
visas nedan passerar genom flera zoner. Roboten känner automatiskt
igen de zoner som den passerar.
Den här listan visas som
en del av ruttens egenskaper när den visas på portalen.
I det här exemplet beskrivs rutten som:
- från parcell: slinga
- till parcell: Länk 1, Zon
1, Länk 2, Zon 2, Zon 3
RTK-basen
RTK-basen kan använda antingen
Wi-Fi eller 4G för att överföra datakorrigeringar till
robotarna. Kraven och konfigurationen av installationen
beror på vilken metod som används. Detaljer om var och en
av dessa baser finns i motsvarande basbruksanvisning.
Basbruksanvisningen
inkluderar:
- En beskrivning av basen och dess
driftsfunktioner.
- Krav och förfarande för
installation.
- Felsökning av basen
- Information om Wi-Fi-repeatern.
Krav avseende hinder
Roboten detekterar tillfälliga
hinder med sina sensorer. I det här avsnittet handlar det om
permanenta hinder som roboten måste undvika
när den beräknar sitt arbetsmönster och när den
arbetar.
Alla sådana hinder måste
omges av en GPS-säkerhetszon eller en förbjuden zon. Båda
betraktas som säkra gränser.
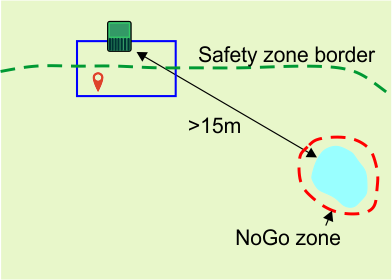
Laddstationen
Stationen måste ha minst
15 m avstånd från alla hinder.
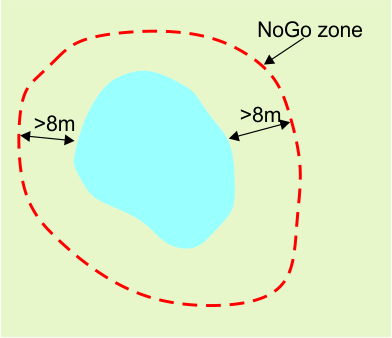
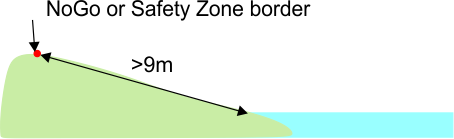
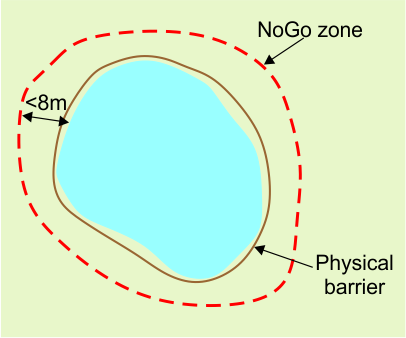
Vatten
Vatten är särskilt skadligt
för robotarna och måste omges av en förbjuden zon eller
en säkerhetszon.
Gränsen för den förbjudna
zonen eller säkerhetszonen måste vara minst 8 m från
vattnets kant.
Om marken lutar ner mot vattnet
krävs ett avstånd på minst 9 m mellan gränsen
för säkerhetszonen eller den förbjudna zonen
och vattnets kant.
Om det inte är möjligt
att ha minst 8 m mellan vattnets kant och den förbjudna
zonen, måste en fysisk barriär som är minst
15 cm hög installeras runt vattnet.
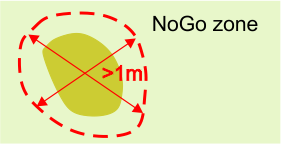
Mått avseende hinder
En förbjuden
zon måste vara minst 1 m i alla riktningar
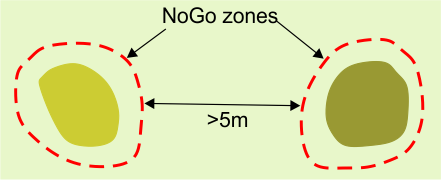
Minsta avstånd mellan de
förbjudna zonerna är 5 m.
En förbjuden zon måste
vara minst 5 m från gränsen till säkerhetszonen
där roboten arbetar
Om ett hinder är mindre än
5 m från gränsen till den säkerhetszon där
roboten arbetar, bör säkerhetszonens gräns anpassas
till att gå runt hindret. I konfigurationen
som visas i följande figur går säkerhetszonens gräns
runt hindret.
Det måste finnas ett minsta
avstånd på 5 m mellan de gränsavsnitt som närmar
sig och lämnar hindret. Detta innebär att det
kommer att finnas ett område med en bredd på
minst 5 m där roboten inte arbetar. För att övervinna
detta kan du använda två överlappande
säkerhetszoner.
Implementera en 4G RTK-installation
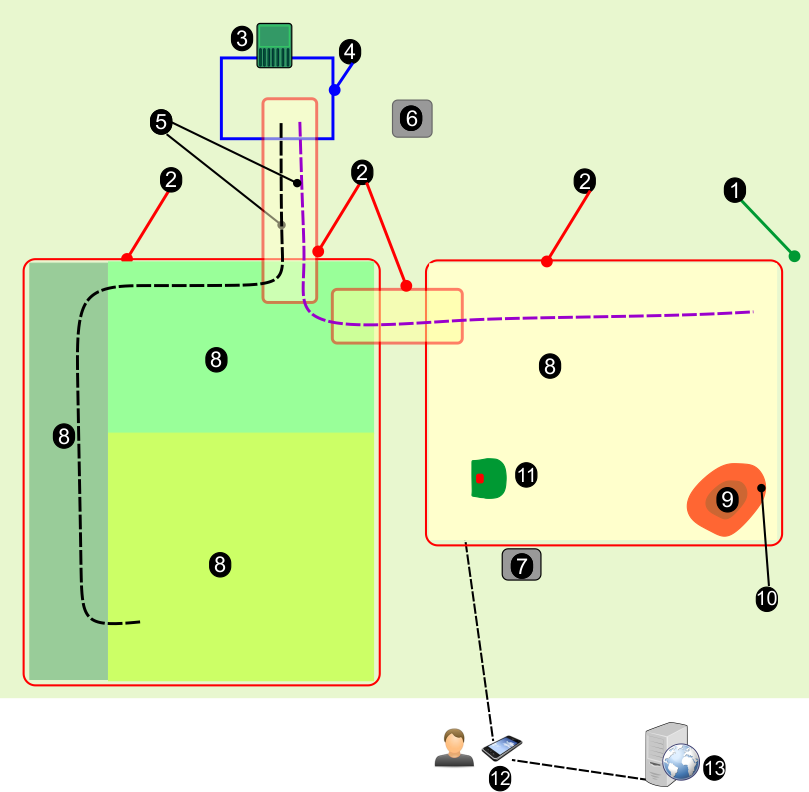
Komponenter för installation
 Hela området
Hela områdetTrådlös
navigering kräver en hög GPS-signalkvalitet. Om platsen
är omgiven av träd eller byggnader som hindrar basens och
robotarnas sikt till satelliterna kan det hända
att ett trådlöst navigeringssystem inte är möjligt.
 GPS-säkerhetszon
GPS-säkerhetszonGPS-säkerhetszoner
är områden som definierar robotens arbetsområde eller
området kring en rutt som roboten använder för navigering.
Gränsen för dessa säkerhetszoner
upptäcks genom att roboten flyttas runt på området.
För att säkerställa att roboten håller
sig inom en säkerhetszon definieras ett antal viktiga
konfigurationsparametrar. Om någon av dessa modifieras blir säkerhetszonerna
ogiltiga och roboten kommer att sluta fungera.
 Station
StationLaddstationen.
 Stationsslinga
StationsslingaEn parcell
med slingkabel måste definieras för att roboten ska kunna
återvända till och lämna stationen. Denna stationsslinga
måste överlappa en GPS-säkerhetszon.
 Rutter
RutterRutter är en rad GPS-punkter
som bildar en navigeringsväg för roboten för att ta
sig mellan stationen och arbetsområdena.
En rutt måste vara innesluten i en säkerhetszon.
 RTK-bas
RTK-basEn RTK-bas måste installeras
för att kommunicera med satelliterna och därefter kommunicera
den exakta positionen till robotarna. Denna kommunikation
kan ske med hjälp av 4G eller Wi-Fi. Om du använder Wi-Fi
kan det bli nödvändigt att använda en Wi-Fi-repeater.
Information om basen finns i den relevanta bruksanvisningen
för basen.
 Wi-Fi-repeater
Wi-Fi-repeaterNär Wi-Fi
används för att kommunicera korrigeringarna till roboten
kan det vara nödvändigt att använda en eller två
Wi-Fi-repeatrar för att täcka hela
platsen.
 GPS-definierade interna arbetszoner
GPS-definierade interna arbetszonerEtt
valfritt antal GPS-definierade zoner kan definieras för att skapa
olika arbetsområden. Dessa måste vara placerade inom
den övergripande GPS-säkerhetszonen. De
behöver inte överlappa med stationsslingan. De behöver
inte definieras genom ett förfarande för
att detektera gränserna.
 Permanenta hinder
Permanenta hinderDessa är
objekt som träd, uthus, dammar eller lekplatser som roboten måste
undvika. I de flesta fall krävs en förbjuden zon
för att säkerställa att dessa undviks
på ett tillförlitligt sätt.
 Förbjuden zon
Förbjuden zonDessa är
områden som definieras av GPS-koordinater där roboten inte
kommer att arbeta för att undvika hinder.
 Robot
RobotRoboten måste vara
utrustad med en GPS-antenn så att den kan kommunicera med satelliter
och RTK-basen.
 Smarttelefonapp
SmarttelefonappMed Turf Pro-appen
för smarttelefoner kan du definiera och verifiera den yttre GPS-säkerhetszonen.
 Webbportal
WebbportalRoboten måste
vara ansluten till webbportalen turfpro.toro.com.
Planera installationen
En installation utan begränsningskabel
måste uppfylla ett antal stränga kriterier. Utvärdera
de kriterier som angetts tidigare i denna bruksanvisning
innan du påbörjar installationen.
Bedöma området
-
Kontrollera
att det finns fri sikt för robotarna och basen.
-
Kontrollera
att GPS-signalen är stark.
Skapa en plan
-
Gör
en ritning av områdets layout.
-
Bestäm
platsen där stationen och slingan/slingorna ska installeras.
-
Bestäm
hur många säkerhetszoner som krävs. Detta beror på
hur komplext området är.
-
Bestäm
hur roboten ska navigera från slingan till säkerhetszonerna
för arbete.
-
Bestäm
basens plats.
-
Bestäm
om du vill använda 4G eller Wi-Fi.
-
Bestäm
platsen för eventuella Wi-Fi-repeatrar.
-
Bestäm
antalet, storleken och formen på de interna GPS-arbetszoner som
behövs.
-
Bestäm
hur du vill hantera hinder. Dessa kan hanteras med förbjudna
zoner, genom formen på GPS-säkerhetszonen eller med fysiska
barriärer.
-
Om du är
osäker kan du kontakta din återförsäljare/distributör
för råd och hjälp.
Läs detta först
-
Ladda roboten
med hjälp av laddstationen.
-
Uppdatera
programvaran till den senaste versionen.
-
Kontrollera
kvaliteten på områdets yta.
-
Fyll i fördjupningarna i
ytan där pölar kan bildas.
-
Se till att gräset klipps
till en maximal höjd på 10 cm.
Obs! En fullständig 4G RTK-installation kan endast utföras av
någon med användarrollen Tekniker.
Installera RTK-basen, stationen
och slingan
-
Installera
basen på den valda platsen. Se bruksanvisningen för RTK-basen.
-
Installera
laddstationen på den valda platsen. Se bruksanvisningen för laddstationen.
-
Installera
stationsslingan enligt instruktionerna tidigare i denna bruksanvisning.
Ansluta roboten till basen
Sättet på vilket
roboten är ansluten till basen beror på om de använder
Wi-Fi eller 4G för att kommunicera med varandra.
En 4G RTK-installation
kräver lösenordsskydd för Wi-Fi-anslutningen. Basen
måste ha programvaruversion 3.0.0 eller senare.
Mer information om att uppgradera programvaran finns i den
relevanta manualen för RTK-basen. Om grundprogramvaran har uppgraderats
definieras lösenordet under uppgraderingen.
Annars hittar du standardlösenordet för Wi-Fi på identifieringsdekalen
på RTK-basen. Du måste skapa ett nytt lösenord.
Ansluta till basen för Wi-Fi
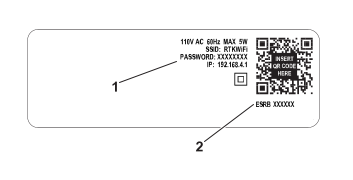
G539289
-
Det ursprungliga/förinställda
lösenordet för bas-Wi-Fi-nätverket
-
Basens serienummer.
Så här ansluter du roboten
till basen:
-
Tryck
på 9 på
roboten för att öppna teknikerns meny.
-
Välj GPS RTK > > RTK Wi-Fi-anslutning (GPS RTK > > RTK
Wi-Fi Connection).
-
Ange
standardlösenordet för basen.
Ansluta till basen för 4G
Obs! Robotens RTK 4G-funktion måste aktiveras från portalen
eller smarttelefonappen.
-
Se till att
roboten är i läge På (On) och är online.
-
Logga in
på portalen eller smarttelefonappen.
-
Välj
roboten och klicka på Parametrar (Parameters).
-
Klicka på  för att ladda
ner de senaste konfigurationsparametrarna från roboten.
för att ladda
ner de senaste konfigurationsparametrarna från roboten.
-
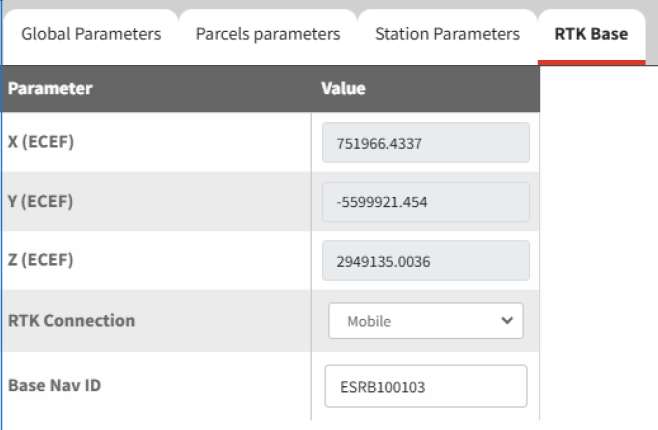
Välj Redigera parametrar (Edit Parameters).
-
Välj
fliken RTK-bas.
-
Ställ
in parametern för RTK-anslutning på Mobil.
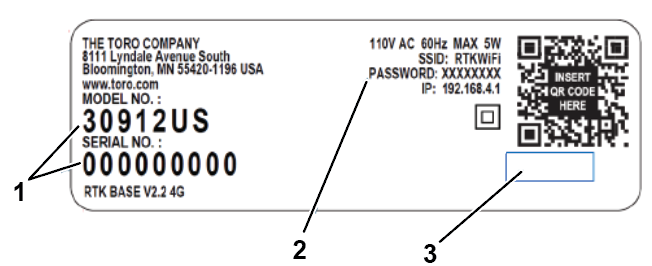
För
serienummer 324000000 till 324999999
-
Ange bas-ID-numret.
Det finns på basens dekal och rutkoden.
Obs! Använd inga mellanslag när du anger bas-ID-numret.
G539289
-
Det ursprungliga/förinställda
lösenordet för bas-Wi-Fi-nätverket
-
Basens serienummer.
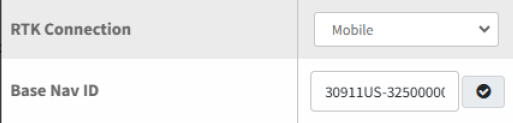
För
serienummer 325000000 och högre:
-
Ange bas-ID-numret
för basen. Det finns på basens dekal och rutkoden.
Obs! Använd inga mellanslag när du anger basens modell- och
serienummer. XXXXX-000000000
G542400
-
Bas-ID-serienummer Modellens serienummer
-
Ursprungligt/standardlösenord
för bas-ID:t
-
Området är tomt
G542398
-
Tryck på  för att ladda
upp den nya inställningen till roboten.
för att ladda
upp den nya inställningen till roboten.
-
Ställ
robotens huvudomkopplare i läge Av (Off), slå sedan På (På) igen och tryck på
strömknappen på knappsatsen.
-
Vänta
tills upplänkens status visar att den är Ansluten (Connected).
-
Signalkvaliteten
bör vara 2,0. Signalkvalitetsnivåer kan visas i Teknikerns meny (9) > GPS RTK (Technician’s menu (9) > GPS RTK).
Obs! Det kan ta några minuter.
Styra roboten på distans
från smarttelefonappen
Med Turf Pro-smarttelefonappen
kan du fjärrstyra robotens rörelser. Det innebär att
du kan genomföra en gränsdetektering utan
att behöva flytta roboten för hand.
Förfarandet
består av två steg:
- konfigurera appen
- styra roboten på distans.
Obs! Appen behöver bara konfigureras en gång.
Konfigurera appen
Obs! Fjärrstyrning kan endast ställas in av en portalanvändare
med rollen Tekniker.
-
Ladda ner
den senaste versionen av appen på din smarttelefon.
-
Aktivera Åtkomstpunkt (Access Point) på
roboten.
-
Tryck på
knappen för menyn Serviceinställningar (Service Settings
Menu).
-
Navigera
till Anslutningar (Connections).
-
Ändra
från Klient (Client) till Åtkomstpunkt (Access Point).
Obs! Detta visar robotens serienummer som åtkomstpunkt.
-
Du måste skapa ett
nytt lösenord. Standardlösenordet är 12345678. När du har skapat ett nytt
lösenord väljer du bockmarkeringsikonen.
-
Välj X för att återgå
till huvuduppgiftsvyn.
Ansluta till roboten
-
Anslut telefonen
till internet och öppna Toro Turf Pro-appen.
-
När
du ser robotarna i listan öppnar du telefonens Wi-Fi-meny.
-
Koppla bort
från det aktuella Wi-Fi-nätverket och anslut till roboten.
Roboten kommer att identifieras i Wi-Fi-listan som
robotens serienummer.
-
Ange lösenordet
som skapades i föregående avsnitt.
-
Välj Anslut (Connect). Om du uppmanas till
det markerar du rutan som anger att du vill fortsätta vara ansluten
till nätverket utan internet.
-
Växla
tillbaka till Toro Turf Pro-appen.
-
Öppna
menyn och välj Wi-Fi-åtkomst för robot (Robot Wi-Fi access).
-
När
du tillfrågas om roboten är konfigurerad som Åtkomstpunkt (Access Point) väljer
du OK.
-
Välj OK när du uppmanas att verifiera
att du är ansluten till robotens åtkomstpunkt.
Styra roboten på distans
När du
har konfigurerat appen markerar du knappen Fjärrkontroll och trycker på bockmarkeringen
på robotens gränssnitt. Detta gör att du kan börja
fjärrstyra roboten med hjälp av styrspaken.
Obs! Vi rekommenderar att du står bakom roboten när du styr
den.
Medan roboten fjärrstyrs
måste:
- roboten uppfylla alla säkerhetskrav
- klipphuvudena vara inaktiverade.
Kollisioner: om något
av följande fel detekteras kommer roboten att stanna men fjärrstyrningen
förblir aktiv:
- BumperLeft, BumperRight
- Lift1, Lift2, Lift3, Lift4, Tilt
- CollisionLeft, CollisionRight
Om ett av dessa fel förblir
aktivt i mer än 30 sekunder blir det en lång kollision
och därför ett allvarligt fel. I det fallet
inaktiveras fjärrstyrningen.Allvarligt fel: om något av följande
fel detekteras kommer fjärrstyrningen att inaktiveras.
- ManualStop, LongCollision ShuttingDown
- LeftWheelMotorBlocked, RightWheelMotorBlocked
- LeftWheelMotorTooHot, RightWheelMotorTooHot
Fjärrstyrningen måste väljas
på nytt innan den är tillgänglig igen.
Skapa en GPS-säkerhetszon
GPS-säkerhetszonens
gräns har avgörande betydelse i en 4G RTK-installation.
Den definierar gränsen för det område där roboten
kan arbeta. Detta kan vara antingen en arbetszon
eller en zon som omger en rutt. GPS-signalnivån över hela
säkerhetszonen bör vara 2. Detta är
särskilt viktigt vid gränsen.
Obs! GPS-säkerhetszonen kan endast skapas av en användare med
användarrollen Tekniker på
webbportalen.
Rekommenderade tekniker för
gränsdetektering
För att säkerställa
bra resultat när roboten klipper gränsen rekommenderar vi
att du markerar klippbredden på baksidan av
roboten med tejp. Detta gör det lättare att visualisera
den faktiska kanten på klippområdet.
Klippbredden (X) är 1 033 mm
(dvs. 516,5 mm från robotens mitt). Gränsen detekteras
genom att styra roboten med hjälp av smarttelefonappen.
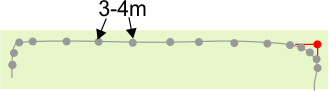
GPS-punkter
läggs till med jämna mellanrum för att definiera gränsen.
Obs! Lägg inte till för många punkter. På raka sträckor
räcker det med en punkt var tredje till fjärde meter. Fler
punkter bör läggas till i kurvor
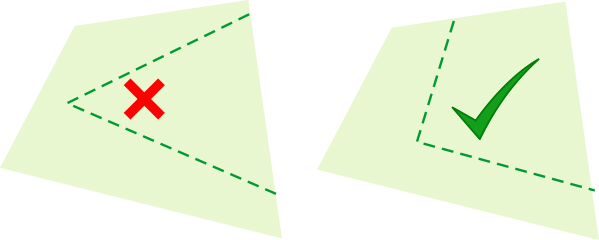
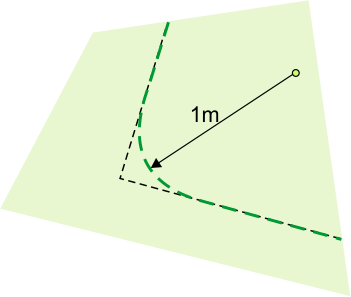
Skapa kurvor i hörnen, inte
spetsiga vinklar.
Obs! Vinklarna måste vara rundade med en radie på minst 1 m.
Kurvan som definierar gränsen
anses vara giltig om:
- Den övergripande formen på
gränsen kan vara konvex eller konkav.
- Det får inte förekomma
att gränspunkter korsar varandra.
Obs! På gränsens svåra delar, kan du markera gränsen
för att hjälpa till att styra roboten längs den önskade
gränsen.
Punkterna på kurvan
kan redigeras (flyttas eller tas bort) från webbportalen eller
appen. Punkterna kan också tas bort med
hjälp av smarttelefonappen under gränsdetekteringen.
Skapa GPS-säkerhetszonen
Du kan skapa en GPS-säkerhetszon
på följande platser:
- I smarttelefonappen (rekommenderas)
- På roboten
- På webbportalen
?.1 På smarttelefonappen
Obs! Detta förfarande kräver att du har konfigurerat appen och
att den är ansluten till roboten.
-
Öppna
menyn och välj Wi-Fi-åtkomst för robot (Robot Wi-Fi Access).
-
I vyn Wi-Fi-åtkomst för robot (Robot Wi-Fi Access)
väljer du Detektera GPS-objekt (Discover GPS Object).
-
I vyn Välj GPS-zon att detektera (Select GPS zone
to discover) trycker du på +-knappen högst upp på skärmen
för att skapa en ny zon.
-
I vyn Skapa nytt GPS-objekt (Create New GPS Object)
väljer du GPS-säkerhetszon (GPS Safety Zone).
-
I vyn Skapa ny GPS-zon (Create New GPS Zone)
anger du zonens namn.
-
Klicka på
fältet Välj en angränsande parcell (Select a neighboring
parcel) och välj ett lämpligt alternativ:
- Om detta är den säkerhetszon
som kommer att överlappa med parcellen med stationens slingkabel,
ska du välja denna parcell
med stationsslinga
- Om detta är en säkerhetszon
som inte kommer att anslutas till stationens slingkabel kan du välja Ingen
-
Tryck på Spara inställningar (Save Settings).
?.2 På roboten
-
På roboten
väljer du Teknikerns meny (9) > Infrastruktur
> Parceller > Skapa (Technician's menu (9) > Infrastructure
> Parcels > Create).
-
Bekräfta
att du vill skapa en ny GPS-zon.
-
Redigera
namnet.
-
Välj 9 Angränsande parceller (9 Neighboring
parcels). Om säkerhetszonen överlappar med slingan, välj
alternativet PÅ (ON) för SLINGA (LOOP) för parcellen.
Om säkerhetszonen överlappar
andra GPS-säkerhetszoner kan du välja alternativet ”Ingen” (”None”).
?.3 På portalen
-
Välj
roboten och klicka på Parametrar (Parameters).
-
Tryck på för att säkerställa
att du har de senaste konfigurationsparametrarna tillgängliga
på roboten.
-
Klicka på Redigera GPS-konfiguration (Edit GPS configuration)  .
.
-
Klicka på
+ bredvid GPS-parceller (GPS Parcels).
-
Välj GPS-säkerhetszon (GPS Safety Zone).
-
Ange namnet
på säkerhetszonen.
-
Klicka på
fältet Välj en angränsande
parcell (Select
a neighboring parcel) och välj ett lämpligt alternativ:
- Om detta är den säkerhetszon
som kommer att överlappa med parcellen för stationens slingkabel,
så väljer du denna slingparcell.
- Om detta är en säkerhetszon
som inte ska anslutas till stationens slingkabel så kan du välja ”Ingen”.
Kom ihåg
att en GPS-säkerhetszon måste vara ansluten till parcellen
för slingkabeln.
-
Välj Spara inställningar (Save Settings).
-
Tryck på för att överföra
den nya inställningen till roboten.
Detektera GPS-säkerhetszonen
Detta måste göras på
distans genom att styra roboten med smarttelefonappen.
-
På smarttelefonappen
väljer du den säkerhetszon som behöver detekteras.
-
Öppna
robotens lock och tryck på bockmarkeringen.
-
Stå
bakom roboten, flytta den längs gränsen och lägg till
GPS-punkter med hjälp av +-knappen.
Obs! Lägg inte till för många punkter. På raka avsnitt
rekommenderar vi avståndet 3 till 4 m. Punkterna kan vara
närmare varandra på böjda
avsnitt.
-
Lägg
till den sista punkten innan du återvänder till startpunkten.
-
Tryck på
den gröna bockmarkeringen när kretsen är klar. Appen
kommer att sluta kretsen och beräkna polygonen som bildas av
GPS-punkterna. Den kommer sedan att kontrollera
om polygonen som definierar zongränsen är giltig.
-
Om meddelandet Ny GPS-zon är giltig (New GPS zone is
valid) visas trycker du på OK och sedan på spara-ikonen.
Punkterna som definierar den detekterade gränsen
kan visas och ändras på webbportalen.
Verifiera gränsen på
roboten
-
På roboten
väljer du Teknikerns meny (9) > Infrastruktur
> Parceller > {Namn på säkerhetszonen} > Verifiera GPS-gränsen (Technician's menu
(9) > Infrastructure > Parcels > {Name of the safety zone} > Verify
GPS border) och trycker på bockmarkeringen.
-
Bevaka roboten
när den följer den gräns som just har detekterats.
-
Bekräfta
på roboten när det är slutfört.
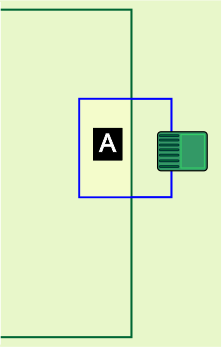
Ställa in en GPS-returpunkt
En GPS-returpunkt krävs för
att roboten ska kunna återvända till stationen. Denna punkt
måste definieras inom både slingkabeln
och säkerhetszonen. Detta är område A i följande
figur.
-
Placera roboten
på en punkt som är minst 5 m från slingkabeln
och i en riktning som är vinkelrät mot slingkabeln. Följande
figur visar tre giltiga positioner för
exemplet som visas i föregående figur.
-
Förflytta
roboten framåt tills den är inne i slingan och vid den punkt
där GPS-returpunkten behövs.
-
På roboten
väljer du Teknikerns meny > Infrastruktur
> Parceller > {Namn på GPS-säkerhetszonen} > Angränsande
parceller (Technician's
menu > Infrastructure > Parcels > {Name of the GPS Safety zone} >
Neighboring parcels).
-
Sätt
knappen bredvid slingan till läget PÅ (ON). Detta skapar
en punkt som leder roboten från säkerhetszonen in i slingan.
-
Välj GPS-punkter > Ställ in (GPS points > Set).
-
Bekräfta
inställningen.
Skapa ytterligare säkerhetszoner
Valfritt antal säkerhetszoner
kan ingå i installationen. Var och en definierar ett separat
område där roboten kan arbeta.
Följande kriterier
gäller:
- En zon i den övergripande
konfigurationen måste överlappa stationens slingkabel.
- Varje säkerhetszon måste
överlappa med andra GPS-säkerhetszoner, slingkabeln eller
en trådbunden parcell för att roboten ska
kunna navigera över hela platsen.
- Denna överlappning måste
vara minst 4 m × 4 m.
- En säkerhetszon måste
skapas av en användare med användarrollen Tekniker på
webbportalen.
Skapa interna GPS-arbetszoner
Interna GPS-arbetszoner
kan skapas inom en säkerhetszon. Dessa kan användas för
att optimera robotens arbete genom schemaläggning.
Följande
villkor gäller:
- Alla dessa interna zoner måste ligga inom en GPS-säkerhetszon.
- De behöver inte definieras
genom ett förfarande för att detektera gränserna. De
kan definieras och redigeras på webbportalen
av alla användartyper som har tillgång till
roboten.
- Klipphöjden i de olika zonerna
är densamma som den som ställts in för den omgivande
säkerhetszonen.
Du
kan skapa en GPS-zon antingen på roboten eller på webbportalen.
.1 Skapa och detektera en GPS-arbetszon på roboten
-
På roboten
väljer du Teknikerns meny (9) > Infrastruktur
> Parcell > {Namn på säkerhetszonen} > Skapa (Technician's menu (9)
> Infrastructure > Parcels > {Name of the Safety Zone} > Create).
-
Bekräfta
att du vill skapa en ny GPS-zon.
-
Redigera
namnet.
-
På smarttelefonappen
väljer du den GPS-arbetszon som behöver detekteras.
-
Öppna
locket på roboten och tryck på bockmarkeringsknappen.
-
Stå
bakom roboten, flytta den längs gränsen och lägg till
GPS-punkter med hjälp av +-knappen.
-
Lägg
till den sista punkten innan du går tillbaka till startpunkten.
-
Tryck på
bockmarkeringsknappen när kretsen är slutförd. Appen
kommer att sluta kretsen och beräkna polygonen som bildas av
GPS-punkterna. Den kommer sedan att kontrollera
om polygonen som definierar zongränsen är giltig.
-
Om meddelandet ”Ny GPS-zon är giltig” visas trycker du på OK och
sedan på spara-ikonen. Punkterna som definierar gränsen
kan visas och redigeras på webbportalen.
Obs! Den här zonen behöver inte verifieras.
Andra GPS-arbetszoner
läggs till på samma sätt. Dessa zoner kan användas
för att optimera robotens arbetsschema.
.2 Skapa en GPS-arbetszon på portalen
Du kan skapa
en intern arbetszon på två sätt:
- definiera en ny uppsättning
punkter
- kopiera och ändra en befintlig
zon.
-
Välj
roboten på portalen och klicka på Parametrar (Parameters).
-
Tryck på för att säkerställa
att du har de senaste konfigurationsparametrarna tillgängliga
på roboten.
-
Klicka på Redigera GPS-konfiguration (Edit GPS Configuration)  .
.
-
Klicka på
+-knappen bredvid GPS-parceller (GPS parcels).
-
Välj GPS-zon inom GPS-säkerhetszonen (GPS zone inside
GPS safety zone).
-
I fältet
Namn på GPS-zon anger du namnet på zonen.
-
Klicka i
fältet ”Välj en överordnad GPS-säkerhetsparcell” (Select a GPS safety parent parcel)
och välj den överordnade zonen.
-
För
att skapa en helt ny GPS-zon väljer du ”Standardvärden” (Default values) i rutan ”Kopiera GPS-koordinater från” (Copy GPS coordinates from). Om
du vill kopiera en befintlig zon väljer du namnet på den
zon som ska kopieras.
-
Klicka på SPARA INSTÄLLNINGAR (SAVE SETTINGS).
-
Tryck på för att överföra
den nya inställningen till roboten. Följ de instruktioner
som krävs för att skapa en ny zon eller ändra
en befintlig.
-
Följ
de instruktioner som krävs för att skapa en ny zon eller
ändra en befintlig.
.2.1 Detektera en ny GPS-arbetszon på portalen
-
Klicka på  bredvid den zon
du just har skapat.
bredvid den zon
du just har skapat.
-
Klicka på
kartan för att definiera var och en av de punkter som ska bilda
den nya GPS-zonen.
När
formen sluts skapas den nya GPS-zonen.
Andra
interna GPS-zoner kan skapas på samma sätt.
Obs! Alla punkter måste vara i säkerhetszonen.
-
Tryck på för att överföra
den nya inställningen till roboten.
.2.2 Ändra en befintlig GPS-arbetszon på portalen
-
Välj
den zon som du just skapade.
-
Klicka på  för att låsa
upp zonen. Ikonen ändras till
för att låsa
upp zonen. Ikonen ändras till  .
.
-
Dra en punkt
till en ny position om du vill flytta den.
-
Klicka på
punkten för att ta bort den.
-
Klicka på  och dra sedan
en ruta runt flera punkter för att markera och sedan radera dem.
och dra sedan
en ruta runt flera punkter för att markera och sedan radera dem.
Obs! Alla punkter måste vara i säkerhetszonen.
-
När
ändringarna är klara klickar du på . Detta ändrar ikonen till .
-
Tryck på för att överföra
den nya inställningen till roboten.
Skapa en förbjuden zon
Förbjudna zoner är
ett sätt att undvika permanenta hinder. När det inte finns
någon begränsningskabel är det viktigt att du
är medveten om förutsättningarna
för att undvika hinder innan du skapar dem. Permanenta hinder
och hur de kan undvikas bör anges på
installationsplanen.
Du behöver också ta
hänsyn till de mått som beskrivs nedan innan du definierar
den förbjudna zonen.
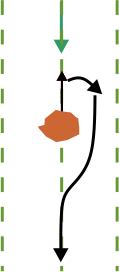
Som framgår av föregående
figur, när roboten utför gränsdetekteringen eller arbetar
i en riktning parallell med gränsen, kommer
platsen för den registrerade punkten på gränsen
till den förbjudna zonen att vara ett avstånd X från
det faktiska området som ska uteslutas.
X är halva bredden av robotens chassi, 639 mm.
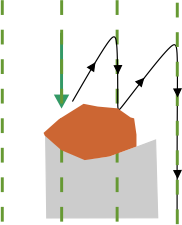
När mönsterriktningen
är vinkelrät mot områdets kant kommer roboten att stanna
när mittpunkten av axeln mellan dess bakhjul
når den registrerade gränspositionen till den förbjudna
zonen. I det här fallet kommer den registrerade GPS-positionen
för gränsen till den förbjudna
zonen att vara ett avstånd Y från robotens framsida. Y är
avståndet mellan bakaxelns mittpunkt
och chassits framkant, 802 mm. När mönsterriktningen
är vinkelrät mot kanten av området kommer robotens
främre del att gå in längre
över gränsen till den förbjudna zonen jämfört
med robotens sida när mönstret är parallellt med områdets
kant.
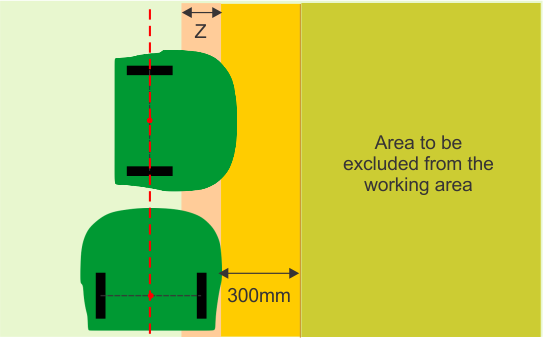
För att undvika att roboten
kommer in i det område som ska uteslutas eller kolliderar med
ett hinder, bör ett minsta
avstånd på 300 mm mellan det uteslutna området
och robotens sida hållas när den förbjudna zonen registreras.
Roboten
kommer att arbeta upp till avståndet Z från den definierade
marginalen (som bör vara minst 300 mm (från robotens
sida) när zonen registreras. För
roboten är Z 123 mm.
Det finns tre metoder för
att skapa en förbjuden zon:
- På roboten
- På smarttelefonappen
- På portalen
Skapa och detektera en förbjuden
zon på roboten
-
Välj Teknikerns meny > Infrastruktur
> GPS förbjudna zoner (Technician's menu > Infrastructure
> GPS NoGo zones) i robotens användargränssnitt.
-
Välj Skapa (Create).
-
Ange ett
namn för den förbjudna zonen.
-
Välj Manuell detektering av förbjudna
zoner (Manual
NoGo zone discovery).
Obs! GPS-signalens kvalitet måste vara 2.
-
Välj Lägg till en ny GPS-punkt (Add a new GPS
point). Antalet GPS-punkter (Number of GPS points)
kommer nu att vara 1 på vyn Manuell detektering
av förbjudna zoner (Manual NoGo zone Discovery).
-
Flytta roboten
till en ny position och välj Lägg till
en ny GPS-punkt (Add a new GPS point) igen. Fortsätt tills du har placerat
roboten i ett antal punkter som omger den zon som ska uteslutas.
Du måste lägga till tillräckligt
med punkter för att definiera zonen med den noggrannhet du behöver,
men om du lägger till för
många punkter saktar det ner roboten under drift.
Obs! Den förbjudna zonen måste verifieras.
Verifiera den förbjudna zonen
Verifiering av den förbjudna
zonen måste göras via robotens användargränssnitt.
-
Välj 9. Teknikerns meny > Infrastruktur
> GPS förbjudna zoner (9. Technician's menu > Infrastructure
> GPS NoGo zones) och välj den förbjudna zon du just har
skapat.
-
Välj Verifiera GPS-gräns (Verify GPS border).
Bekräfta att du vill verifiera gränsen.
-
Bevaka roboten
när den rör sig runt gränsen. Om du godkänner
gränsen klickar du på OK. Om inte så klickar du på Avbryt (Cancel) och startar förfarandet
igen.
Skapa och detektera en förbjuden
zon på smarttelefonen
Detta förfarande kräver
att du har ställt in appen och att appen är ansluten till
roboten.
-
I vyn Wi-Fi-åtkomst för robot (Robot Wi-Fi Access)
väljer du Detektera GPS-objekt (Discovery GPS object).
-
I vyn Välj GPS-zon att detektera (Select GPS zone
to discover) klickar du på  högst upp på skärmen för att skapa en ny zon.
högst upp på skärmen för att skapa en ny zon.
-
Välj GPS förbjuden zon (GPS NoGo Zone).
-
Ange ett
namn för zonen.
-
Tryck på Spara inställningar (Save Settings).
-
I smarttelefonappen
väljer du den förbjudna zon som skapas
-
Tryck på  på robotens
gränssnitt och stäng locket.
på robotens
gränssnitt och stäng locket.
-
Stå
bakom roboten, flytta den med styrspaken och lägg till en GPS-punkt
genom att trycka på +-knappen. Lägg till fler punkter
tills zonens gräns har definierats.
Det måste finnas minst 3 punkter.
-
Tryck på
bockmarkeringsknappen.
-
Appen kommer
sedan att kontrollera om de punkter du har lagt till bildar en giltig
polygon. Om så är fallet kan du trycka
på Spara (Save). Om det inte är det
kan du trycka på papperskorgen för att ta bort punkterna
och börja om.
Skapa och detektera en förbjuden
zon på portalen
-
Välj
roboten och klicka på Parametrar (Parameters).
-
Tryck på för att säkerställa
att du har de senaste konfigurationsparametrarna tillgängliga
på roboten.
-
Klicka på Redigera GPS-konfiguration (Edit GPS Configuration) .
-
Klicka på
+ bredvid GPS förbjudna zoner (GPS NoGo zones).
-
I fältet Namn på GPS-zon (GPS Zone Name) anger
du namnet på den förbjudna zonen.
-
För
att skapa en helt ny GPS-zon väljer du ”Standardvärden” (Default values) i rutan ”Kopiera GPS-koordinater från” (Copy GPS coordinates from).
-
Klicka på SPARA INSTÄLLNINGAR (SAVE SETTINGS).
-
Klicka på bredvid den förbjudna zon du just har skapat.
-
Klicka på
kartan för att definiera var och en av de punkter som ska bilda
den nya GPS-zonen.
-
När
formen sluts skapas den nya förbjudna zonen.
-
Tryck på för att överföra
den nya inställningen till roboten.
Skapa GPS-rutter
Rutter är ett effektivt sätt
för roboten att navigera mellan arbetszoner och stationen. Eftersom
de fungerar i båda riktningarna kan de
användas för att lämna och återvända till
stationen. Ett typiskt exempel på användningen av en rutt
är att definiera en väg mellan stationen,
dess slinga och arbetsområdet. Detta innebär att stationen
kan installeras på en bekväm plats borta
från områden med mycket aktivitet. Rutter kan också
användas för att navigera mellan arbetszoner som ligger
långt ifrån varandra.
Du kan skapa rutter i smarttelefonappen
eller portalen.
Skapa en säkerhetszon som
omger rutten
Alla rutter måste skapas
inuti en säkerhetszon som överlappar de zoner som den ansluter.
Överlappningen med ruttzonen och slingan
eller arbetszonen måste vara mer än 4 m × 4 m.
Skapa alla säkerhetszoner
för rutter innan du börjar skapa rutter.
Obs! Procent arbete för säkerhetszonen runt en rutt måste
ställas in på 0 %.
Dessa
zoner betraktas som säkerhetszoner och skapas därför
genom samma förfarande som en säkerhetszon som definierats
tidigare.
.3 Skapa rutten på en smarttelefonapp
-
I vyn Wi-Fi-åtkomst för robot (Robot Wi-Fi Access)
väljer du Detektera GPS-objekt (Discovery GPS object).
-
I vyn Välj GPS-zon att detektera (Select GPS zone
to discover) klickar du på högst upp på skärmen för att skapa en ny zon.
-
Välj Skapa GPS-rutt (Create GPS Path).
-
Skapa rutt.
-
Ange namnet
på rutten.
Obs! Du behöver inte välja överordnad parcell.
-
Tryck på
fältet Anslutning till trådbunden
parcell (Connection
to wired parcel) och välj ett lämpligt alternativ.
- Om den här rutten ska börja
i överlappningen med stationens slingparcell, välj då
denna slingparcell.
- Om den här rutten är i en säkerhetszon som inte är
ansluten till stationens slingkabel kan du välja Ingen (None).
-
Tryck på Spara inställningar (Save Settings).
.4 Detektera rutten på en smarttelefon
Detta måste
göras genom att fjärrstyra roboten från smarttelefonappen.
Detta kräver att du har konfigurerat appen.
-
Placera roboten
på den första punkten på rutten.
Obs! När en rutt startar från stationsslingan måste den
första punkten på rutten placeras inom överlappningsområdet
mellan stationsslingan och ruttens
säkerhetszon som är ansluten till stationsslingan.
-
Välj
den väg som ska detekteras i smarttelefonappen.
-
Stå
bakom roboten och flytta den längs rutten och lägg till
GPS-punkter med hjälp av +-knappen.
-
Den andra
punkten måste placeras utanför stationsslingan. Ruttdetekteringen
ska alltid gå från stationsslingan mot de andra
zonerna.
-
Lägg
inte till för många punkter. På raksträckor rekommenderar
vi att avståndet mellan punkterna är 10 m för
rutter. Punkterna ska vara närmare
varandra på böjda avsnitt.
-
Låt
rutten sträcka sig in i zonen. Detta hjälper roboten att
navigera när den behöver återvända till stationen.
-
Tryck på
bockmarkeringsknappen när rutten är klar. Appen kommer att
beräkna polygonen som bildas av GPS-punkterna.
-
Klicka på
ikonen Spara (Save).
Obs! Punkterna som definierar rutten som har identifierats kan visas och
ändras på webbportalen.
.5 Skapa en rutt på portalen
-
Välj
roboten och klicka på Parametrar (Parameters).
-
Tryck på för att säkerställa
att du har de senaste konfigurationsparametrarna tillgängliga
på roboten.
-
Klicka på Redigera GPS-konfiguration (Edit GPS configuration) .
-
Klicka på
+ bredvid GPS-rutter (GPS paths).
-
Lämna
den automatiska inställningen i läge PÅ (ON).
-
Ange ett
namn för rutten.
-
Klicka på
rutan Anslutning till trådbunden
parcell (Connection
to Wired Parcel) och välj ett lämpligt alternativ.
- Om den här rutten ska börja
i överlappningen med parcellen med stationens slingkabel ska
du då välja denna slingparcell.
- Om denna rutt är i en säkerhetszon
som inte är ansluten till stationens slingkabel kan du välja ”Ingen” (”None”).
-
Klicka på Spara inställningar (Save Settings).
-
Tryck på för att överföra
den nya inställningen till roboten.
-
Du kan nu
detektera rutten på en smarttelefon som beskrivits ovan eller
fortsätta på portalen.
Detektera en rutt på portalen
Obs! Alla punkter måste vara i en säkerhetszon.
-
Klicka på bredvid den rutt
som du just skapade.
-
Klicka på
kartan för att definiera var och en av de punkter som ska bilda
den nya GPS-zonen.
-
Klicka på
den första punkten som visas i följande figur.
-
Den andra
punkten måste placeras utanför stationsslingan. Ruttdetekteringen
bör alltid gå från stationsslingan mot de andra
zonerna.
-
Lägg
inte till för många punkter. På raka ruttavsnitt rekommenderar
vi ett avstånd på 10 m mellan punkterna. Punkterna
ska vara närmare varandra på böjda
avsnitt.
-
Låt
rutten sträcka sig in i zonen. Detta hjälper roboten att
navigera när den behöver återvända till stationen.
-
Håll
muspekaren över den sista punkten och klicka på  . Detta slutför och sparar
sökvägen.
. Detta slutför och sparar
sökvägen.
-
Tryck på för att överföra
den nya inställningen till roboten.
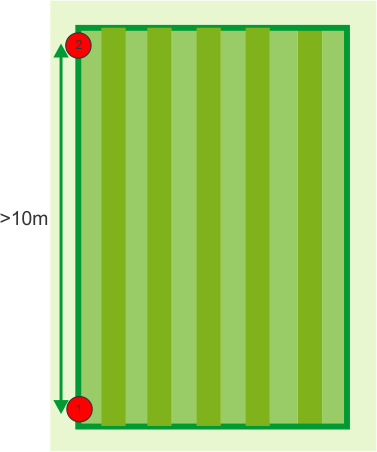
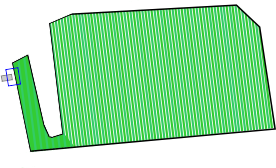
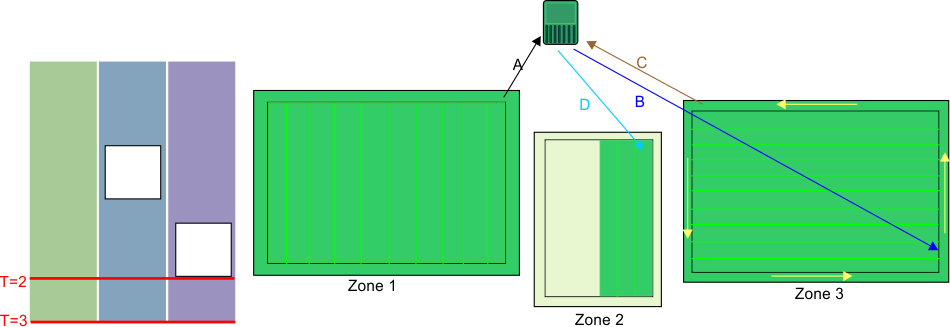
Ställa in klippriktningen
Med detta förfarande kan
du se till att roboten klipper i en riktning som motsvarar kraven
för idrottsplatsen eller planen. Detta förfarande
förutsätter att idrottsplatsen eller planen har ställts
in för mönsterklippning (dvs. att GPS RTK-zonen som
motsvarar idrottsplatsen eller planen har skapats).
Med
det här förfarandet kan du ställa in primära och
sekundära arbetsriktningar.
Innan du påbörjar detta
förfarande bör du kontrollera att GPS-signalens kvalitet
är minst 1,6.
Teknikerns meny (9) > GPS RTK > GPS-signalkvalitet (Technician's menu (9) > GPS
RTK > GPS signal quality).
-
Placera roboten
vid en punkt som kommer att användas som referenspunkt för
att definiera riktningen (punkt 1 i följande figur).
Vi rekommenderar att denna punkt är nära
ett av planens hörn.
-
Välj Teknikerns meny (9) > Infrastruktur
> Parceller > {RTK GPS-zon som motsvarar planen} (Technician's menu (9) > Infrastructure
> Parcels > {RTK GPS zone corresponding to the pitch}). Kontrollera
att alternativet Mönsterklippning är
ikryssat.
-
Välj Huvudriktning (Main heading).
-
Välj Ange referenspunkt (Set ref. point).
-
Förflytta
roboten minst 10 m i den exakta riktningen där mönstret
ska upprättas (punkt 2 i föregående figur). Vi rekommenderar
att du flyttar roboten så långt
som möjligt för att säkerställa den mest exakta
riktningsmätningen.
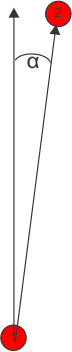
-
När
du har flyttat roboten mer än 10 m kan du definiera den
andra punkten. Välj Ange huvudriktning.
-
Vinkeln (a)
mellan robotens riktning och norr-riktningen visas.
Om du inte
är nöjd med vinkeln, välj Ta bort referenspunkt och
starta förfarandet igen.
Det är
också möjligt att ställa in de andra klippriktningarna
i förhållande till huvudriktningen. Det gör du genom
att välja Andra riktningar och sedan
Antal riktningar och Vinkel mellan var och en av dessa riktningar.
-
Spara inställningarna
när riktningen är definierad.
Konfigurera installationen
Välja typ av klippskiva
Om ditt arbetsområde
ska klippas på en lägre klipphöjd (mindre än 20 mm)
kan du välja att använda en klippskiva för ”låg höjd”. Klippskivornas intervall för
låg höjd är mellan 15 mm och 90 mm.
-
Välj Teknikerns meny (9) > Avancerade parametrar (Technician's menu (9) > Advanced
parameters).
-
Välj Klippskiva och välj Låg höjd.
-
Ställ
in önskad klipphöjd.
Ställa in klipphöjden
Knivarnas klipphöjd
kan ställas in för varje säkerhetszon som definieras
under installationen. Det är inte möjligt att ställa
in olika klipphöjder för interna
arbetszoner. Dessa måste ha samma klipphöjd som den överordnade
säkerhetszonen.
Obs! Klippning är inte aktiverad som standard när roboten navigerar
längs en rutt.
Ställa in klipphöjden på webbportalen
-
Logga in
på portalen och klicka på roboten i listan.
-
Klicka på Parametrar (Parameters).
-
Klicka på för att ladda
ner de senaste konfigurationsparametrarna från roboten.
-
Klicka på
kugghjulsikonen Redigera parametrar (Edit Parameters).
-
Klicka på
fliken Parcellparametrar (Parcel Parameters).
-
Ställ
in klipphöjden till önskat värde.
-
Klicka på
X-ikonen för att stänga fönstret Parameterredigerare.
-
Klicka på för att ladda
upp den nya inställningen till roboten.
Ställa in klipphöjden på roboten
-
Välj Inställningar > Klipphöjd (Settings > Cutting
height) i robotens användargränssnitt.
-
Välj
GPS-säkerhetszonen för att ändra klipphöjden.
-
Klicka på Ange mål (Set target). Välj parcellen
för att ändra klipphöjden.
-
Ange önskad
höjd och tryck på bockmarkeringsikonen.
Ställa in klipphöjden i smarttelefonappen
-
Logga in
på appen och välj roboten.
-
Tryck på Inställningar (Settings).
-
Tryck på för att säkerställa
att du har de senaste konfigurationsparametrarna tillgängliga
på roboten.
-
Tryck på Inställningar (Settings).
-
Tryck på  .
.
-
Ställ
in klipphöjden till önskat värde.
-
Tryck på för att överföra
den nya inställningen till roboten.
Definiera arbetsschemat
Arbetsschemat
för roboten kan definieras antingen genom att definiera ett tidsschema
eller genom att ställa in en procentandel
av tiden som ska tilldelas varje arbetszon.
Ett schema
definieras enklast på webbportalen.
Klippa gränser
I en 4G RTK-installation
är det viktigt att säkerhetszonens gräns klipps regelbundet.
Obs! Vi rekommenderar starkt att du använder sekventiell schemaläggning
för att hantera gränserna.
När
sekventiell schemaläggning implementeras kommer gränsen
alltid att klippas så snart klippningen i arbetszonen har slutförts.
Implementera sekventiell schemaläggning
-
Välj Serviceinställningar > Drift (Service Settings
> Operations) i robotens användargränssnitt.
-
Välj Sekventiellt schema (Sequential Schedule)
och sätt knappen till läge PÅ (ON).
-
Du får
se en lista över parceller/zoner inklusive rutter. Välj
de som ska ingå i sekvensen PÅ (ON).
-
Om du inte
vill att en zongräns ska ingå i sekvensen väljer du Inställningar > Gräns (Settings > Border)
och definierar gränsinställningarna.
Obs! De förbjudna zonernas gränser klipps inte.
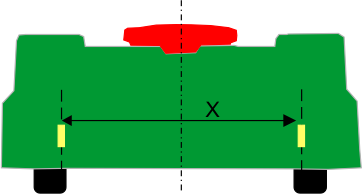
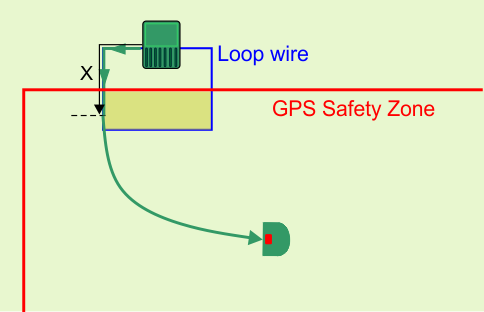
Konfigurera utgångsparametrar för stationen
En GPS-signalnivå
på 1,2 är tillräcklig för att roboten ska lämna
stationen, men det krävs en signalnivå på 2 för
att roboten ska fungera i säkerhetszonen.
När roboten lämnar stationen måste den färdas
en sträcka X längs slingkabeln innan den stöter
på en lämplig signalnivå på
2. Detta avstånd X måste ställas in som en utgångsparameter.
Denna
parameter kan ställas in manuellt, men vi rekommenderar att du
låter roboten ställa in dem automatiskt.
Manuell inställning av utgångsparametrar
-
Välj Teknikerns meny (9) > Infrastruktur
> Stationer > Manuell station > Utgångsparametrar (Technician’s menu (9) > Infrastructure >
Stations > Manual station > Exit parameters).
-
Välj Skapa ny parameteruppsättning (Create new parameter
set).
-
Ställ
in avståndet X som det Minsta utgångsavståndet (Min exit distance).
Det minsta värde som kan anges är 0,8 m.
-
Ange det
värde som krävs för det Maximala utgångsavståndet (Max exit distance).
Detta kan vara 1 m mer än det minsta utgångsavståndet.
Ställa in utgångsparametrar
automatiskt
-
Placera roboten
vid laddstationen.
-
Välj Teknikerns meny (9) > Infrastruktur
> stationer > Manuell station > Kalibrera nu (Technician’s menu (9) > Infrastructure >
Stations > Manual station > Calibrate now).
-
Bekräfta
att du vill kalibrera stationen. Roboten gör en cirkel runt slingan.
Den kommer att ställa in Minsta
utgångsavstånd (Min exit distance) till den
tillryggalagda sträckan innan GPS-signalnivån på 2
registreras. Det maximala
utgångsavståndet (Max exit distance) kommer att
ställas in på 1,0 m mer än minimivärdet.
-
Bekräfta
för att acceptera värdena.
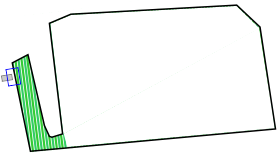
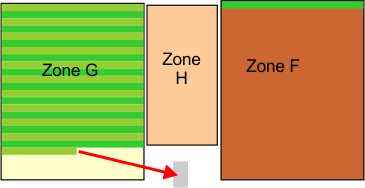
Användningsfall för
4G RTK
En stationsslinga krävs för
att roboten ska kunna nå stationen. Minst en GPS-säkerhetszon
måste vara ansluten till stationsslingan.
Obs! För en 4G RTK-installation måste GPS-signalnivån 2
vara tillgänglig för att arbetszoner och förbjudna
zoner ska gälla.
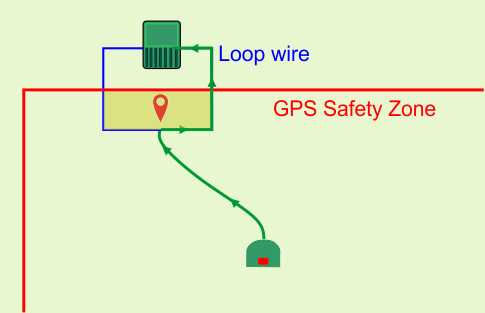
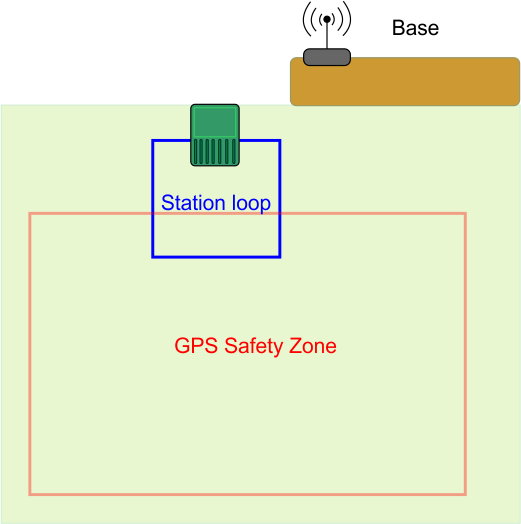
En GPS-säkerhetszon
- Området är öppet.
Det finns inga träd som begränsar sikten mellan robotarna,
basen och satelliterna.
- GPS-signalen ligger på nivå
2 över hela området.
- Basen kan monteras på fyra
meters höjd på en byggnad.
- GPS-säkerhetszonen överlappar
stationens slingkabel med minst 4 m × 4 m.
Slingan är inställd som angränsande parcell till
säkerhetszonen.
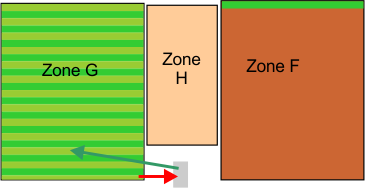
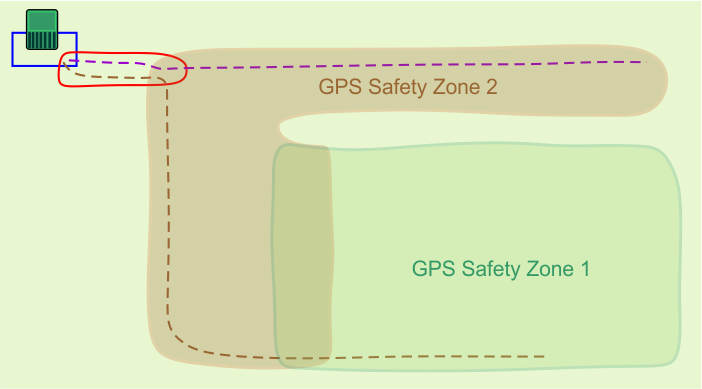
Två GPS-säkerhetszoner
anslutna till slingan
- Två GPS-säkerhetszoner
definieras, som var och en överlappar stationens slinga med 4 m × 4 m.
I båda fallen måste slingan ställas
in som angränsande parcell till säkerhetszonerna.
- Om Wi-Fi används för
korrigeringarna kan det vara nödvändigt att använda
en repeater.
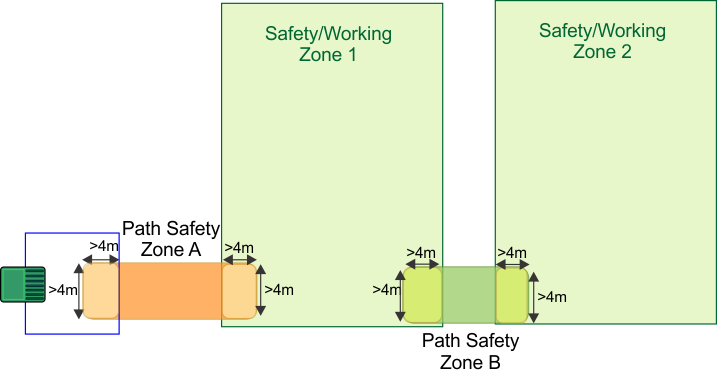
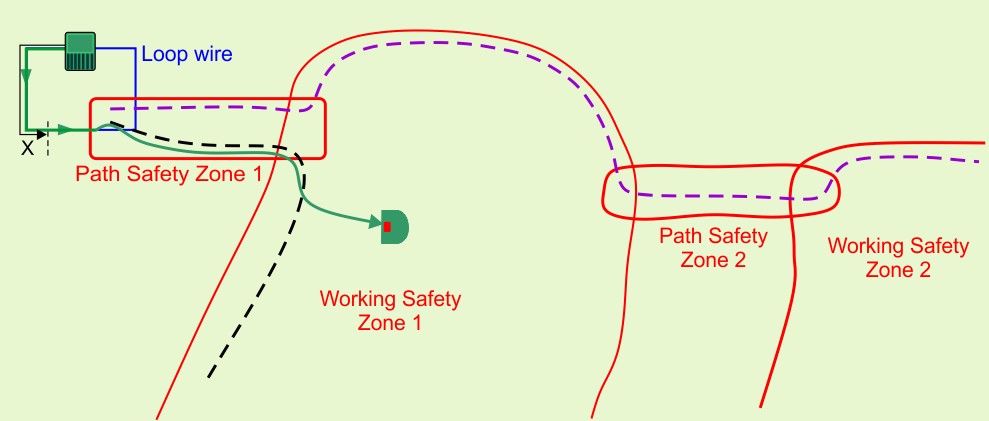
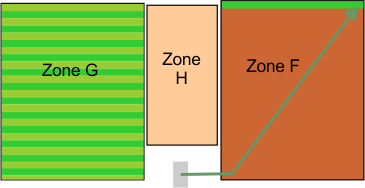
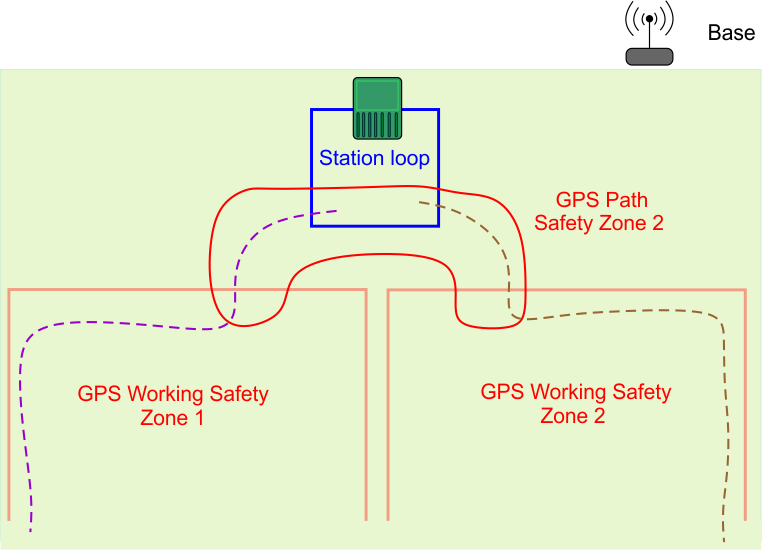
Två säkerhetszoner som
är förbundna med rutter
- Förutom de två GPS-säkerhetszonerna
skapas ytterligare en GPS-säkerhetszon för GPS-rutten. Denna
zon ansluter till slingan med en överlappning
på mer än 4 m × 4 m.
- Ruttzonen överlappar båda
arbetszonerna.
- Rutter skapas för att roboten
ska kunna nå båda arbetszonerna.
- Rutterna sträcker sig långt
in i arbetszonerna. Detta hjälper roboten att navigera tillbaka
till stationen.
- Om Wi-Fi används för
korrigeringarna kan det vara nödvändigt att använda
en repeater.
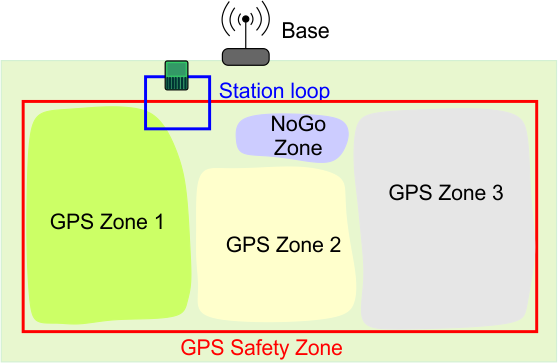
En säkerhetszon, tre GPS-arbetszoner
och en förbjuden zon
- En GPS-säkerhetszon omfattar
hela arbetsområdet.
- GPS-säkerhetszonen överlappar
stationens slingkabel med minst 4 m × 4 m.
- Tre GPS-arbetszoner har definierats
inom säkerhetszonen för att optimera robotens arbetsschema.
Dessa behöver inte överlappa
stationens slingkabel.
- En förbjuden zon har definierats.
Denna måste vara minst 5 m från säkerhetszonens
gräns.
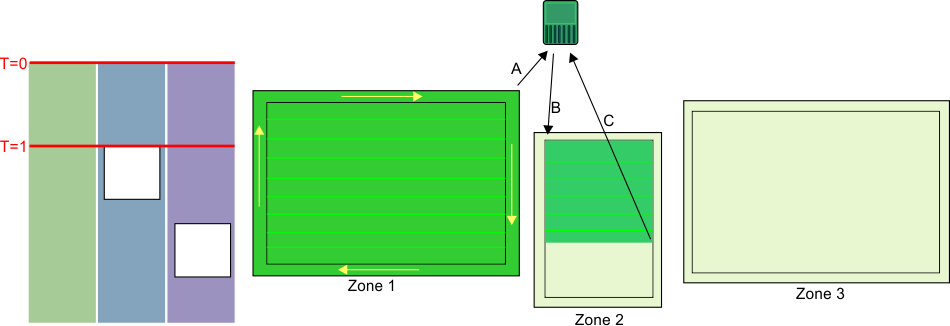
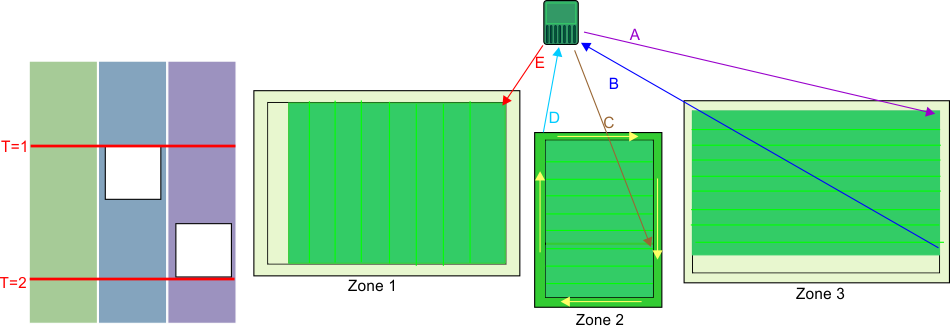
Arbetszoner med långt avstånd
som är förbundna med rutter
- Tre separata arbetsområden
kan anslutas med rutter.
- Rutterna ligger i ytterligare
säkerhetszoner.
- En rutt passerar genom flera GPS-zoner.
- Rutterna sträcker sig in
i arbetszonen för att underlätta för roboten att ta
sig tillbaka till stationen var den än befinner
sig när den behöver återvända till
stationen.
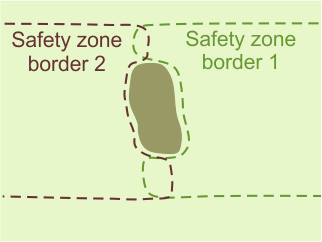
Säkerhetszon som innehåller
en smal passage
I det här exemplet innehåller
säkerhetszonen en passage där avståndet mellan angränsande
sektioner av säkerhetszonens gräns
är mindre än 5 m. Den här situationen kan orsaka
problem och du bör använda konfigurationen som visas i följande
figur i stället. I den här konfigurationen
har två separata zoner definierats för att undvika att ha
angränsande sektioner som ligger för nära.
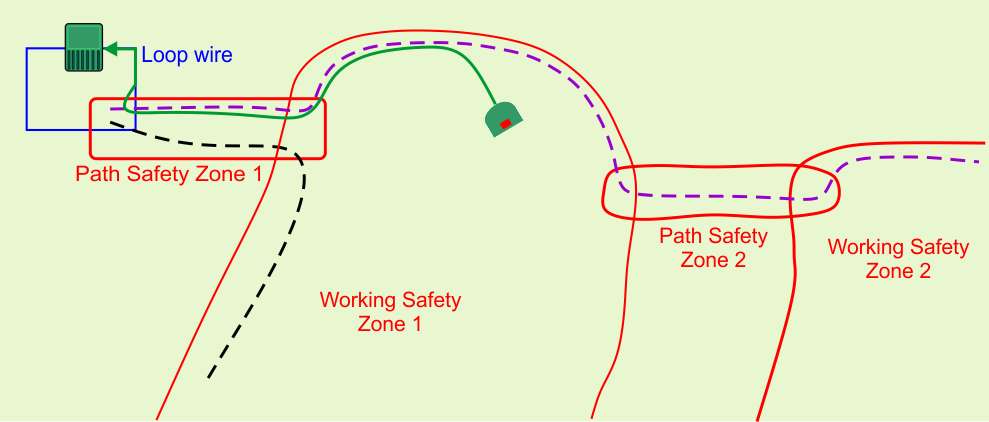
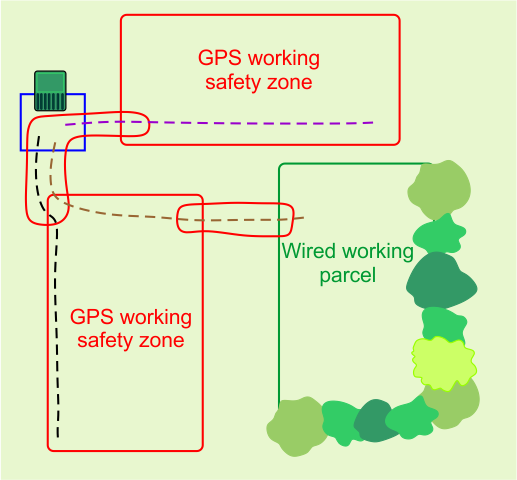
Rutter som ansluter GPS-arbetszoner
och trådbundna arbetszoner
G527734
Rutter kan användas för
att ansluta GPS-arbetszoner och trådbundna parceller. En begränsningskabel
kan behövas i de situationer där
GPS-signalens nivå är mindre än 2.
Felsökning
Under en 4G RTK-installation där
det inte finns någon begränsningskabel är det avgörande
att roboten endast fungerar inom sin säkerhetszon.
Ett antal konfigurationsparametrar, som används under installationen,
övervakas. Om någon av dessa modifieras
genereras ett fel och roboten slutar fungera.
Dessa kritiska parametrar
är:
- RTK-basstationsmätning – i referensposition.
- Basstationens ID.
- GPS-koordinaterna för alla
GPS-säkerhetszoner som används. Detta inkluderar inte de
säkerhetszoner (eller GPS-zoner) som har
0 % arbetstid.
- GPS-koordinaterna för alla
förbjudna zoner.
- Tillståndet för alla
GPS-säkerhetszoner (om de har lagts till eller tagits bort).
- Tillståndet för alla
GPS förbjudna zoner (om de har lagts till, tagits bort, aktiverats
eller inaktiverats).
- Wi-Fi-lösenordet, om Wi-Fi
används.
När en
ny uppgift startas detekteras alla ändringar automatiskt och
roboten kommer inte att starta uppgiften. Orsaken till
problemet kan visas i vyn 4G RTK ÖVERSIKT (4G RTK SUMMARY)
i robotens användargränssnitt. Detta bör visas automatiskt,
men kan även visas genom att välja Teknikerns meny (9) > Infrastruktur > 4G RTK Översikt (Technician's menu (9) > Infrastructure
> 4G RTK Summary).
Mer information om alla meddelanden
som visas i den här vyn finns i den tekniska bruksanvisningen.
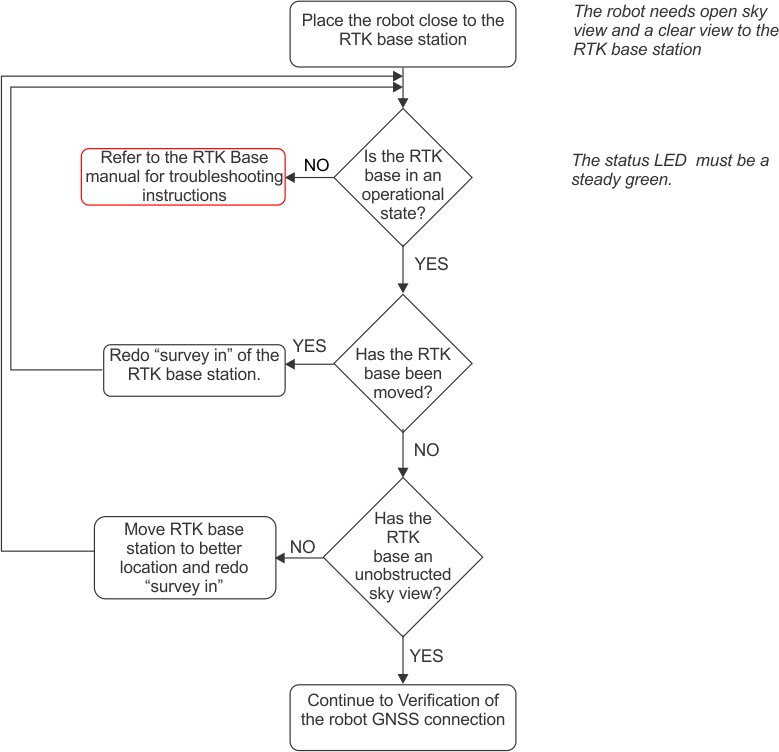
Felsöka RTK GPS-installationer
Detta förfarande används
för att identifiera problemet när GPS-signalkvaliteten är
för låg. Signalkvalitetsnivåer kan visas
i Teknikerns meny (9) > GPS RTK (Technician's menu
(9) > GPS RTK). Detta förfarande består av ett antal steg
som bör utföras i ordning.
Verifiera GNSS-anslutningen för
RTK-basstationen
Obs! Efter varje åtgärd, ska du alltid vänta några
minuter för att verifiera om GPS-signalens kvalitet har ökat
till RTK-kvalitetsnivå > 1,2.
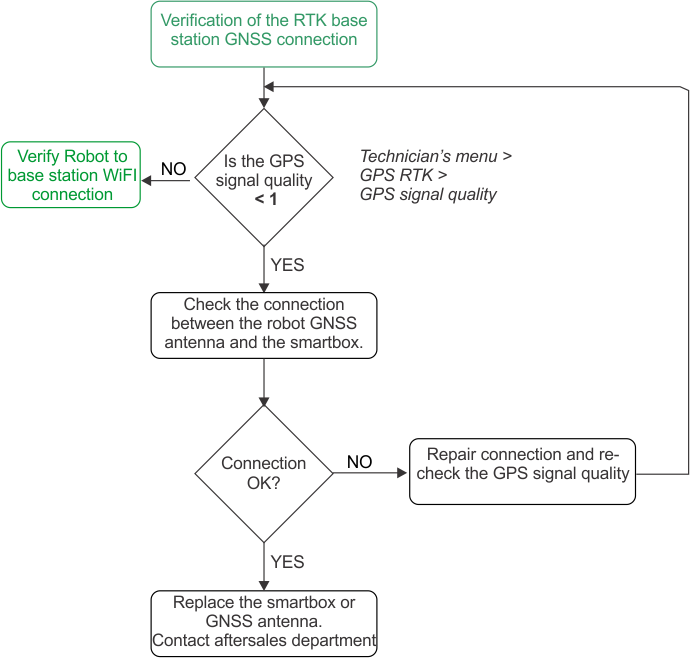
Verifiera robotens GNSS-anslutning
Obs! Efter varje åtgärd, ska du alltid vänta några
minuter för att verifiera om GPS-signalens kvalitet har ökat
till RTK-kvalitetsnivå > 1,2.
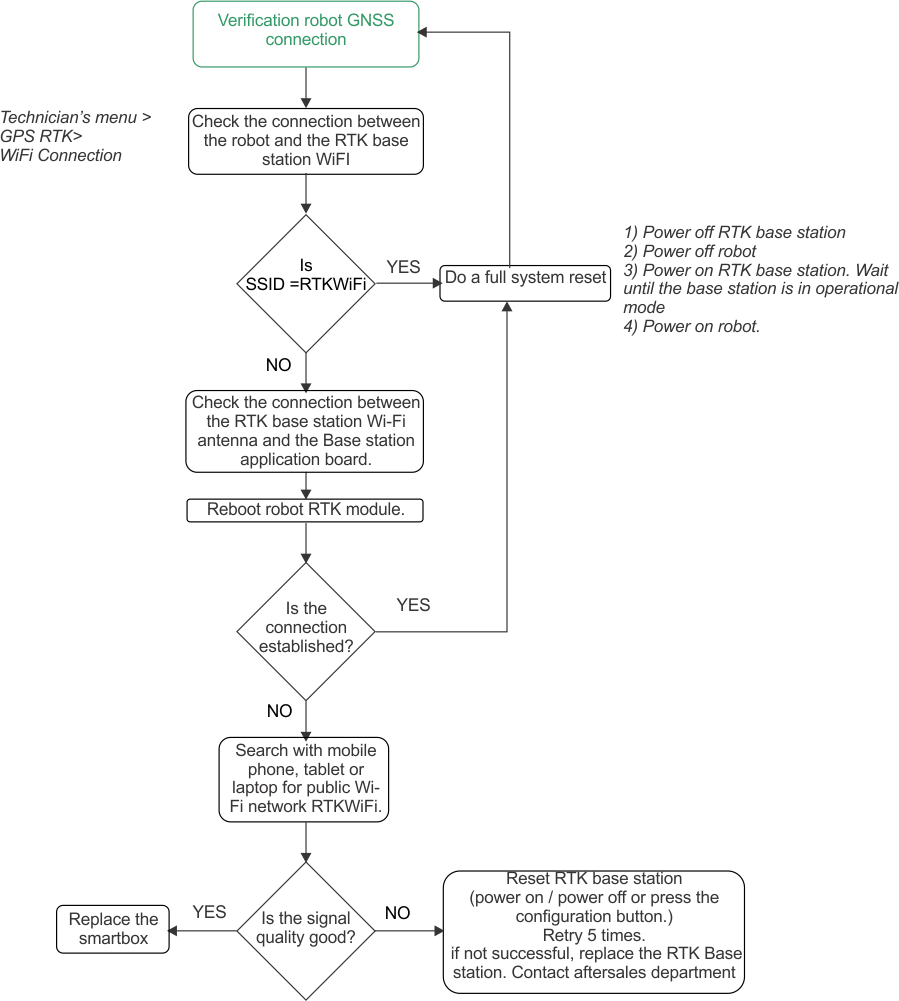
Verifiera Wi-Fi-anslutningen mellan
roboten och RTK-basstationen
Obs! Efter varje åtgärd, ska du alltid vänta några
minuter för att verifiera om GPS-signalens kvalitet har ökat
till RTK-kvalitetsnivå > 1,2.
Bilagor
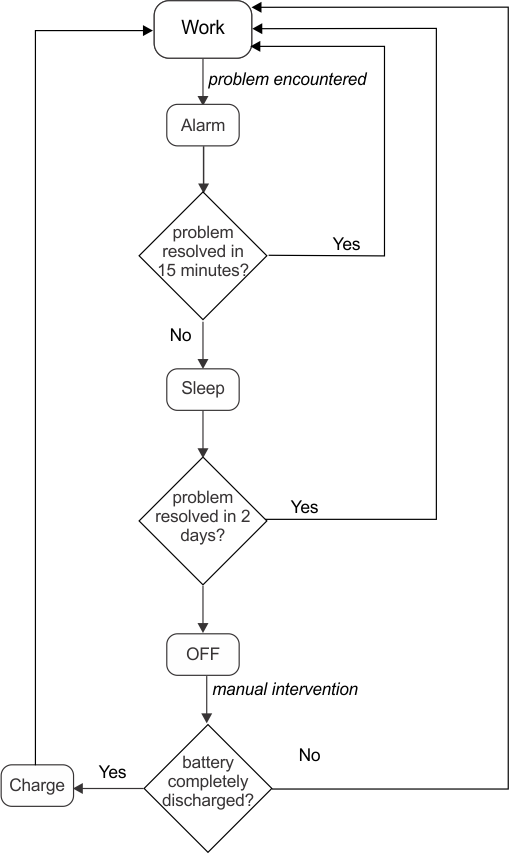
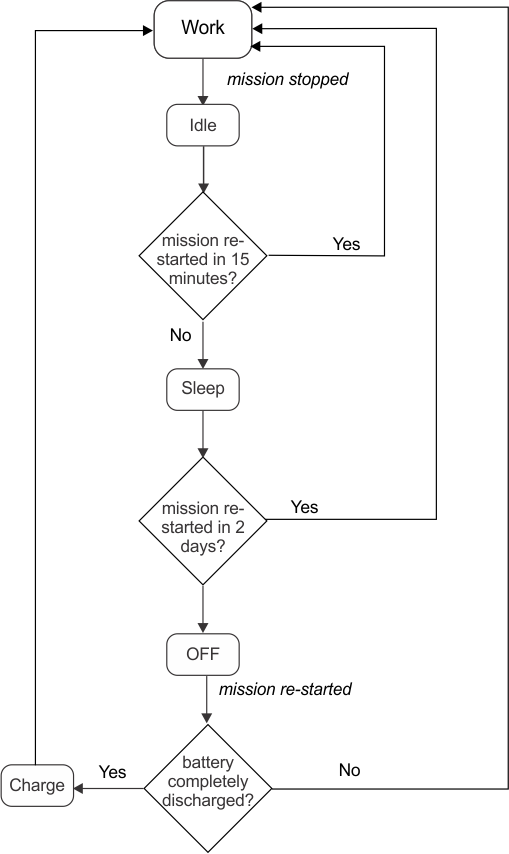
Inaktivt tillstånd.
Ett villkor
kan uppstå som gör att roboten stoppar sin autonoma klippningsuppgift
och går in i ett inaktivt tillstånd. Orsaker
till detta kan vara:
- Roboten har stött på
ett problem och har utfärdat ett larm.
- Uppgiften har stoppats manuellt.
I
båda dessa situationer finns det mekanismer för att hantera
robotens strömförbrukning.
Larm
När roboten stöter
på ett problem registrerar den ett larm, vilket så småningom
kommer att kräva en manuell åtgärd.
Om larmet inte
har tagits bort efter 15 minuter går roboten in i viloläge.
I detta läge reducerar roboten sin strömförbrukning
genom att stänga av allt utom modemet.
Obs! Viloläge aktiveras endast om roboten har varit påslagen
i mer än en timme.
Den förblir
i viloläge i två dagar, eller tills batteriet når en
mycket låg nivå, varefter den stänger av sig själv.
Detta
kommer att kräva manuell åtgärd: ta bort larmet och
återuppta det autonoma arbetsläget, eller flytta roboten
till en laddstation för att ladda
batteriet.
Uppgiften stoppades
I det här fallet kommer
roboten att gå in i ett viloläge. Som standard går
roboten in i viloläget efter 15 minuter så som
beskrivs ovan och där strömförbrukningen
reduceras till ett minimum. Den förblir i viloläge i två
dagar, eller tills batteriet når en
mycket låg nivå, varefter den stänger av sig själv.
Innan
roboten återupptar arbetet utför den ett självtest
för att kontrollera integriteten hos hela systemet (inklusive
elektronik, sensorer, mekanik och programvara).
- Om självtestet lyckas, återgår
roboten till det autonoma arbetstillståndet.
- Om självtestet misslyckas
registrerar roboten ett larm, vilket kommer att kräva en åtgärd.