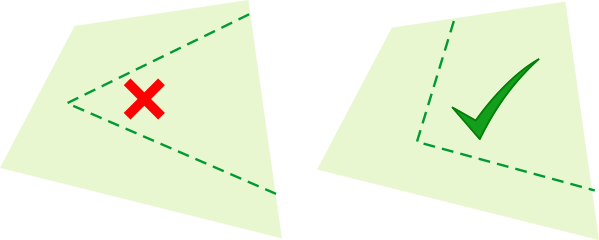
Helpoin tapa
varmistaa, että jokainen vyöhyke ja sen raja leikataan säännöllisesti,
on ottaa käyttöön peräkkäinen ajoitus.
Kun peräkkäinen ajoitus on käytössä,
robotti työskentelee vuorotellen kullakin vyöhykkeellä
ja leikkaa rajan, kun leikkaus on valmis.
Robotti toimii määritellyn työaikataulun mukaisesti.
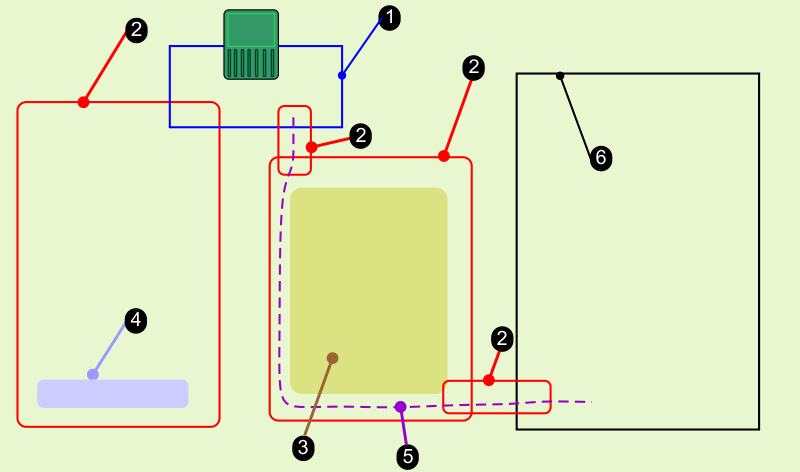
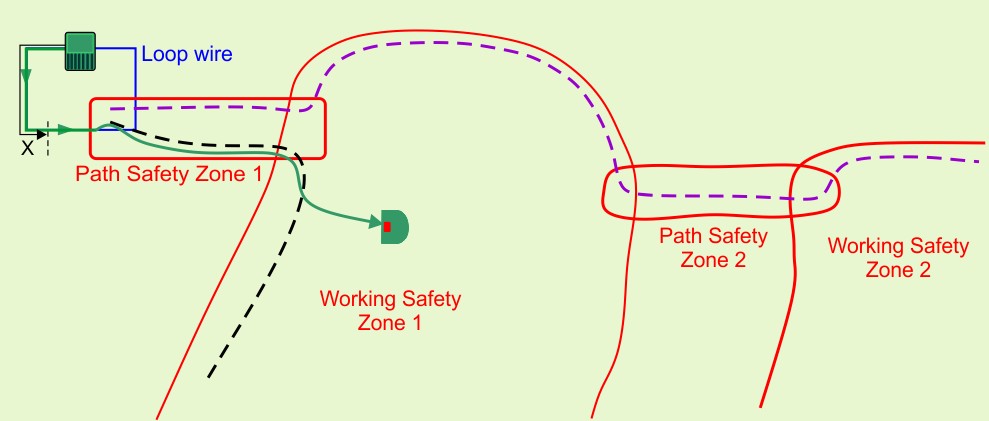
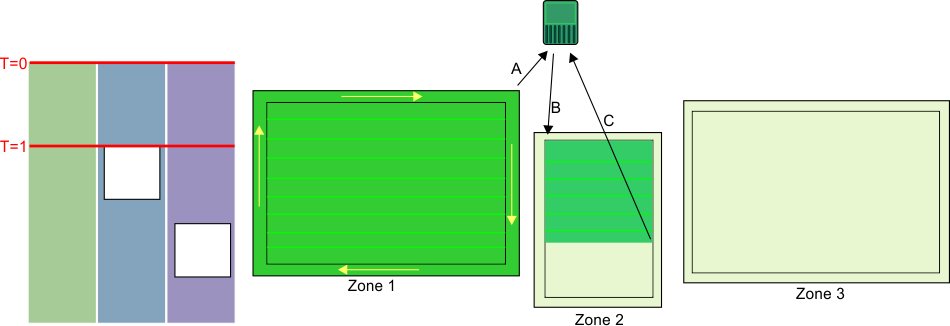
Peräkkäisen
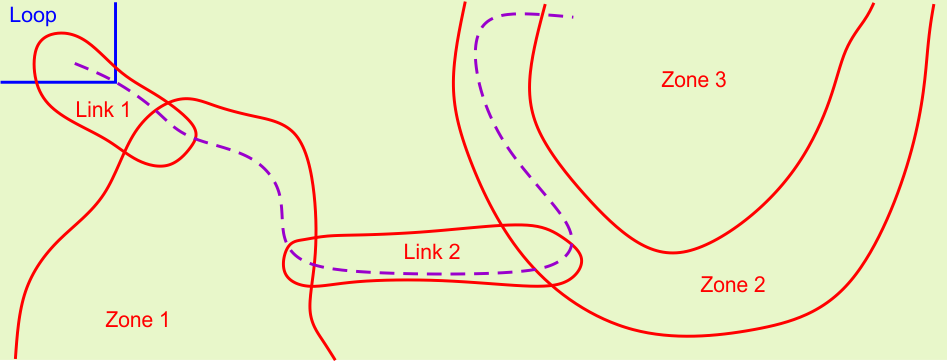
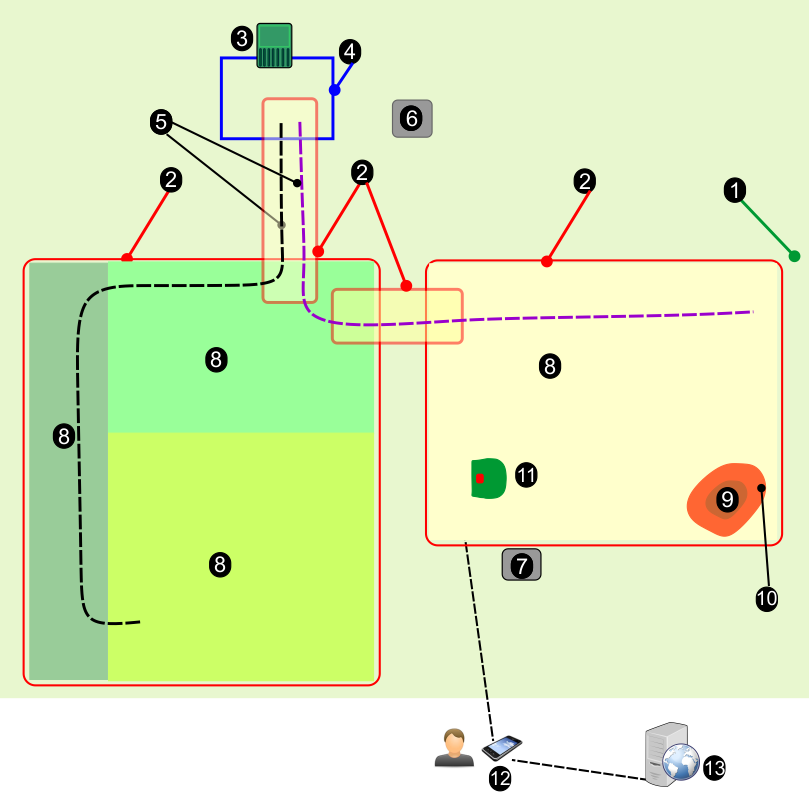
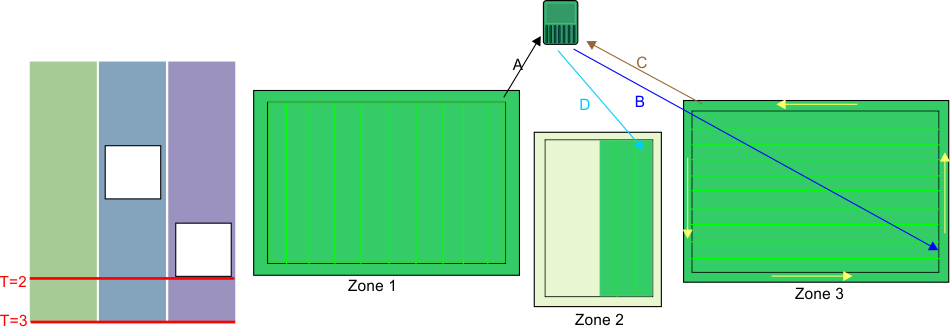
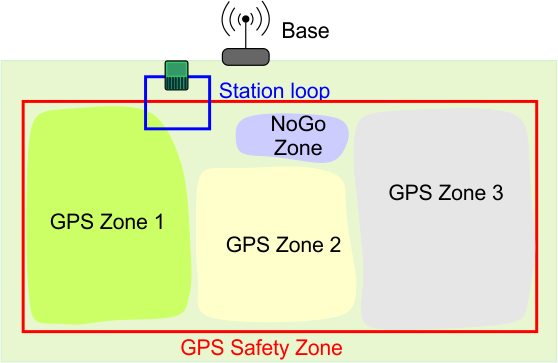
ajoituksen prosessi on esitetty seuraavassa kuvassa. Katso asennusta,
jossa on kolme erillistä leikattavaa vyöhykettä.
Määritetyn aikataulun mukaan vyöhykkeet
2 ja 3 eivät ole käytettävissä tiettyinä
vuorokaudenaikoina.
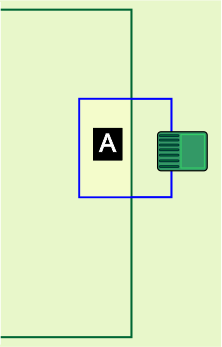
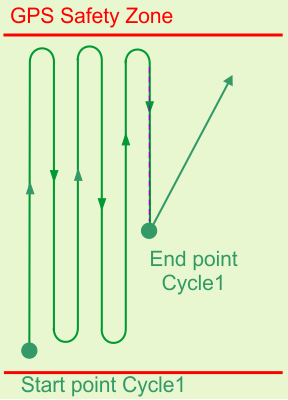
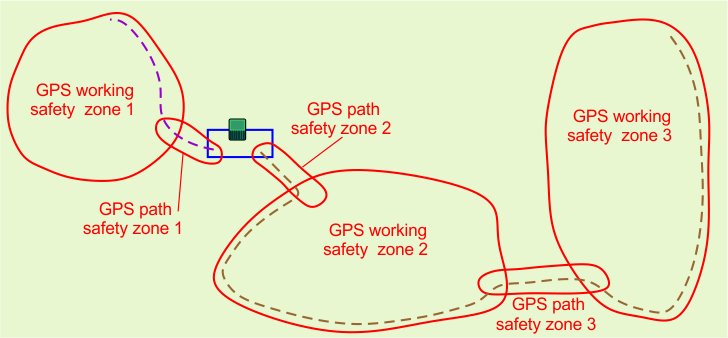
Hetkellä T=0 robotti aloittaa
vyöhykkeen 1 leikkaamisen. Kun koko alue on leikattu, se leikkaa
rajan ja palaa sitten asemalle (A). Tämän
jälkeen se siirtyy vyöhykkeelle 2 (B) ja leikkaa kunnes
aika T=1, jolloin määritetyn aikataulun mukaan vyöhyke
2 ei ole käytettävissä. Robotti
palaa asemalle (C).
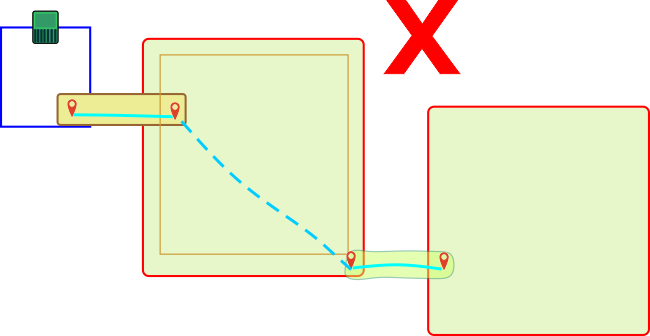
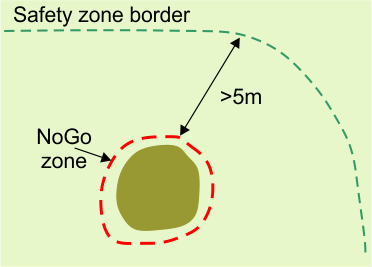
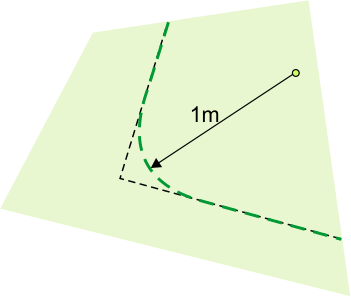
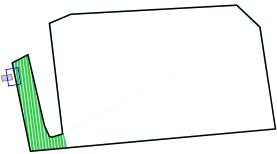
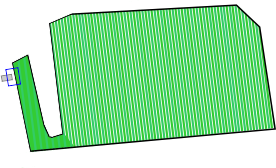
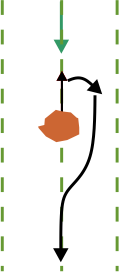
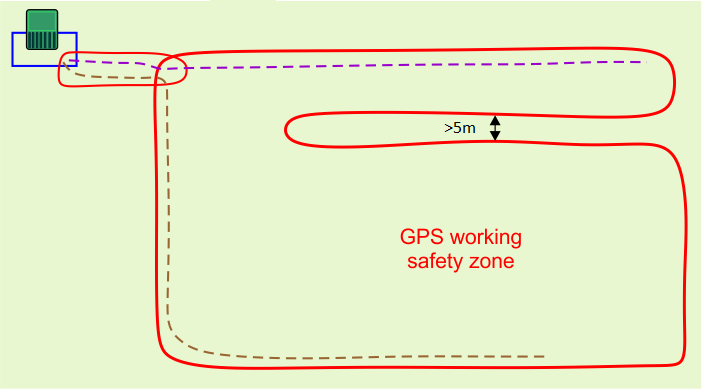
Huomaa: Rajaa leikatessaan robotti kulkee samaan suuntaan kuin reunan tunnistuksessa.
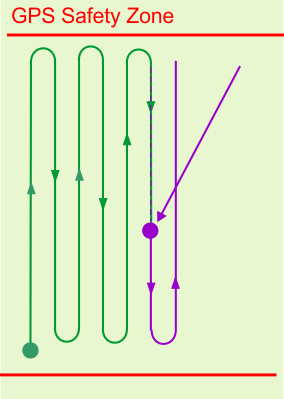
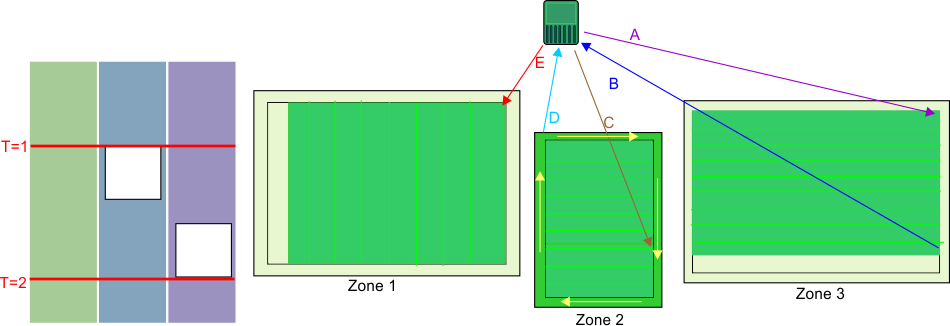
Kun aika T=1, robotti siirtyy
vyöhykkeelle 3 (A) ja leikkaa siellä, kunnes aikataulu määrää,
että vyöhyke 3 ei ole käytettävissä.
Robotti palaa ensin asemalle (B) ja sitten leikkuualueelle
2 (C) viimeistelemään työn. Kun alue on leikattu, se
leikkaa rajan ennen paluuta asemalle (D).
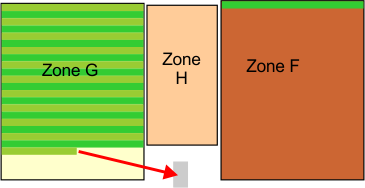
Koska vyöhyke 3 ei ole vieläkään käytettävissä,
se siirtyy vyöhykkeelle 1 ja aloittaa leikkaamisen
uuteen suuntaan (E).
Hetkellä T=2 vyöhyke
1 ei ole valmis, kun vyöhyke 3 on käytettävissä.
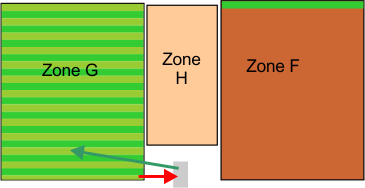
Hetkellä T=2 robotti viimeistelee
vyöhykkeen 1 leikkauksen ja leikkaa sitten rajan ennen paluuta
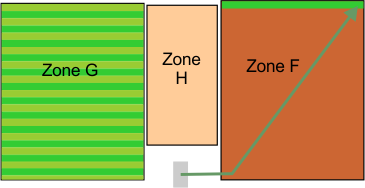
asemalle (A). Sen jälkeen se palaa vyöhykkeelle
3 (B) ja viimeistelee vyöhykkeen ja rajan leikkaamisen. Se palaa
asemalle (C) ja aloittaa sitten vyöhykkeen
2 leikkaamisen uuteen suuntaan (D).
Huomaa: Peräkkäisen ajoituksen käyttö on erittäin
suositeltavaa. Jos sitä ei käytetä, on määriteltävä
tietyllä vyöhykkeellä työskentelyyn
käytettävä prosenttiosuus ja rajan
viikoittaiset leikkauskerrat.