Den nemmeste
måde at sikre, at hver zone og dens skel klippes regelmæssigt,
er at implementere sekventiel planlægning. Når
sekventiel planlægning er implementeret, vil robotten
arbejde i hver zone efter tur og klippe skellet, når klipningen
er færdig. Robotten arbejder i overensstemmelse
med den definerede arbejdsplan.
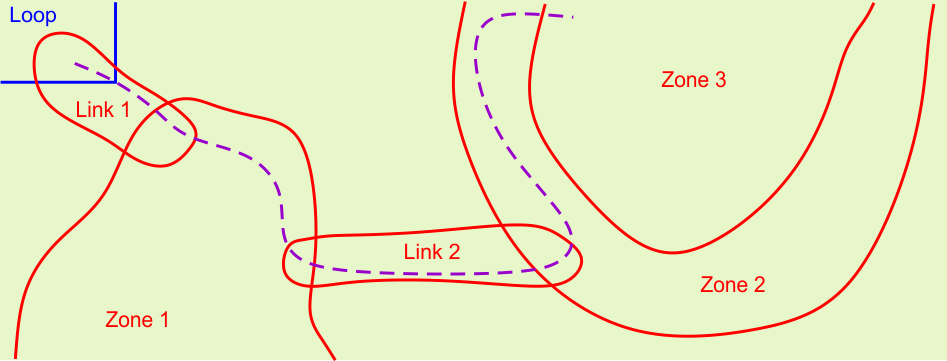
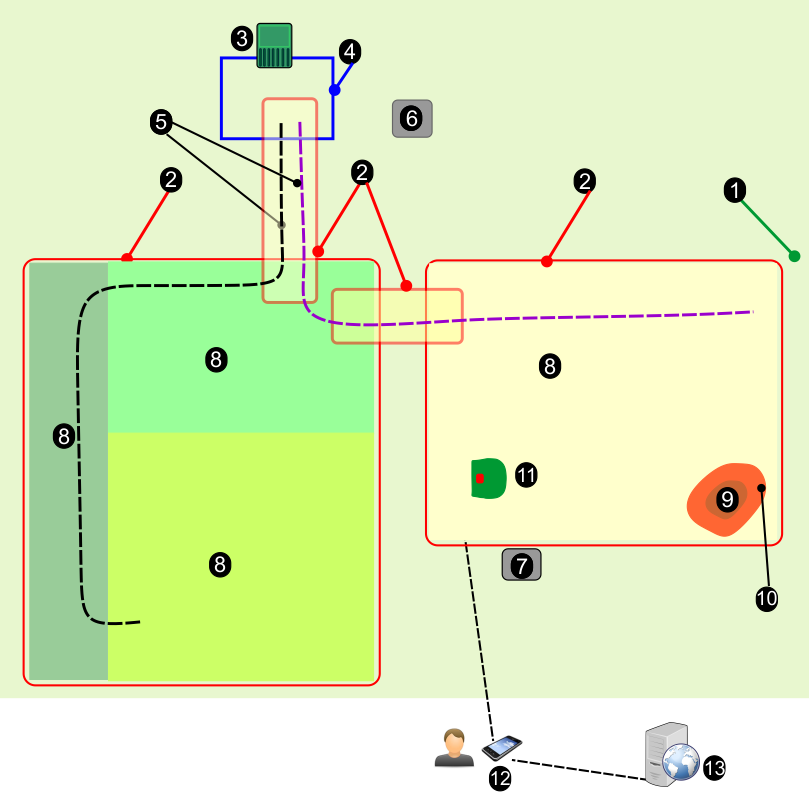
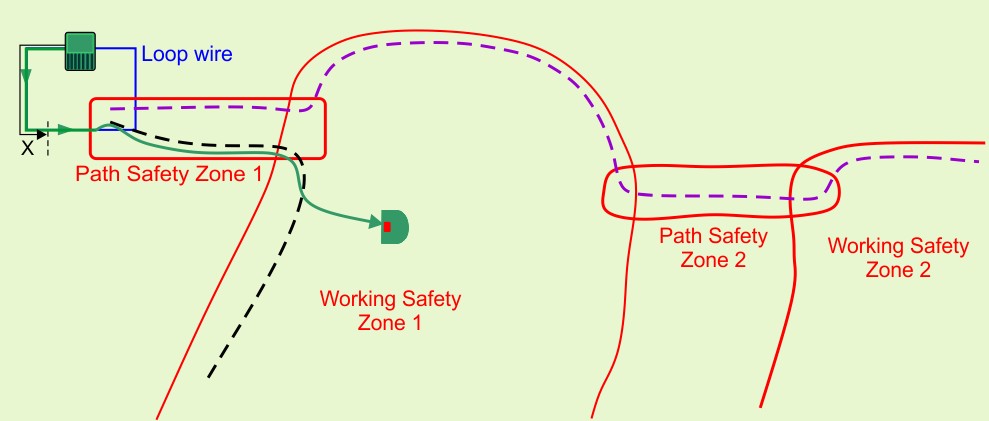
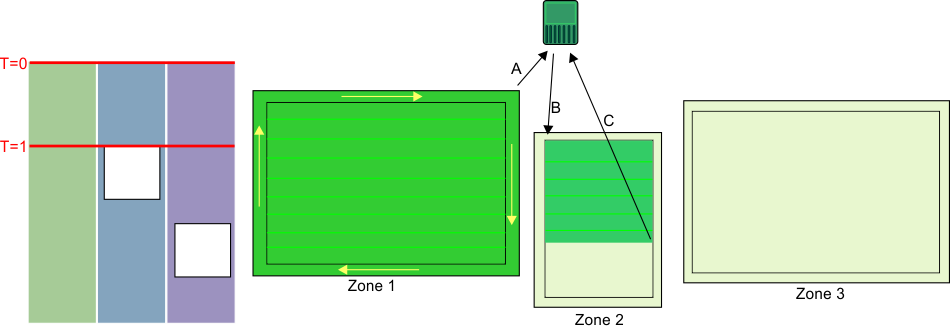
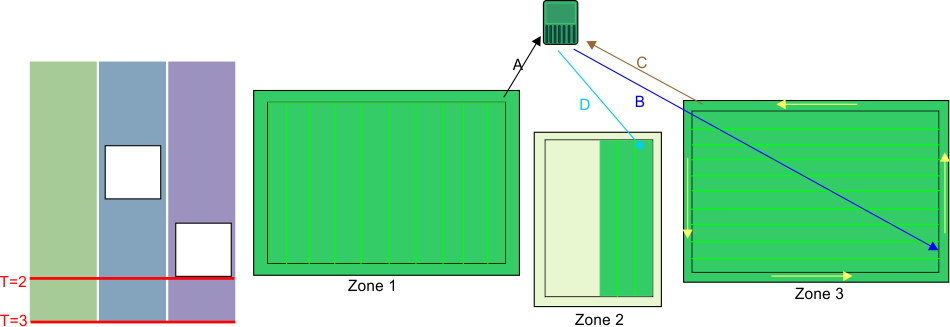
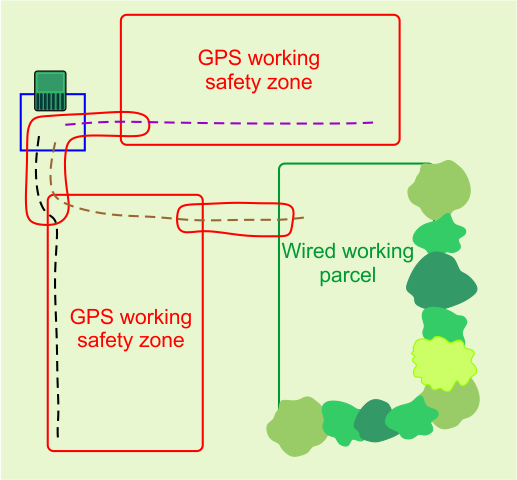
Processen med sekventiel planlægning
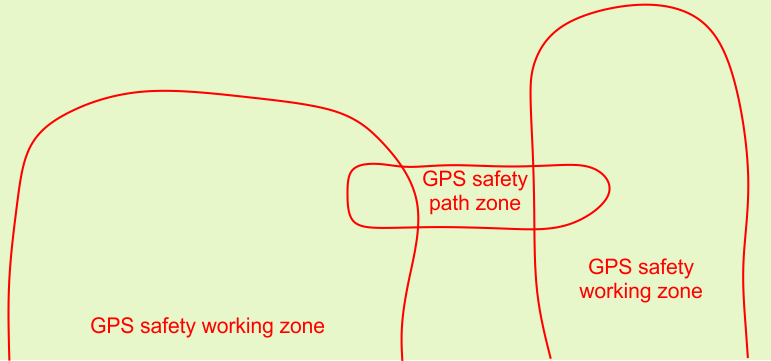
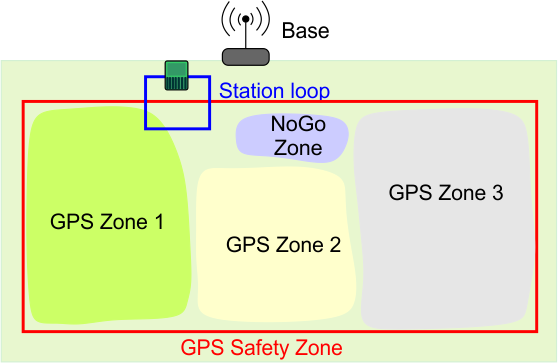
er vist i følgende figur. Overvej installationsopsætningen
med tre separate zoner, der skal klippes.
Den definerede tidsplan dikterer, at zone 2 og 3 ikke er tilgængelige
på bestemte tidspunkter af dagen.
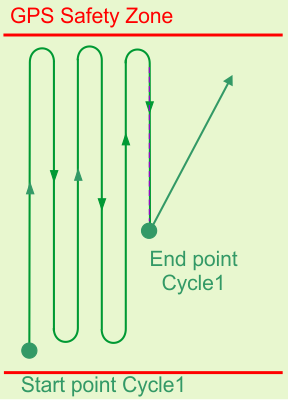
På tidspunktet T=0 begynder
robotten at klippe zone 1. Når hele området er klippet,
klipper den skellet og vender derefter tilbage
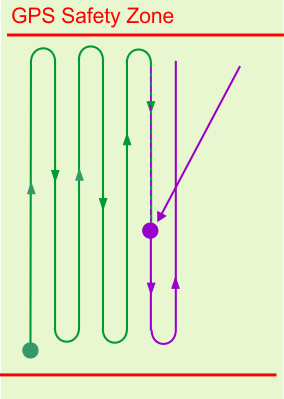
til stationen (A). Den flytter derefter til zone 2 (B) og klipper
indtil tidspunktet T=1, hvorefter den definerede
tidsplan dikterer, at zone 2 ikke er tilgængelig. Robotten
vender tilbage til stationen (C).
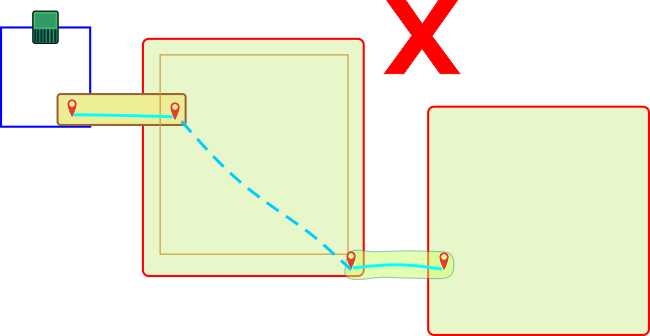
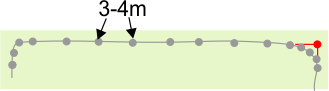
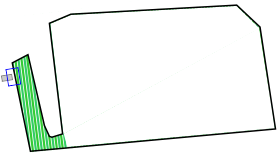
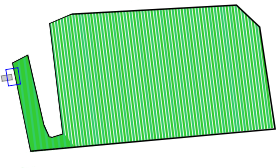
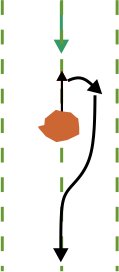
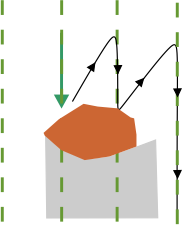
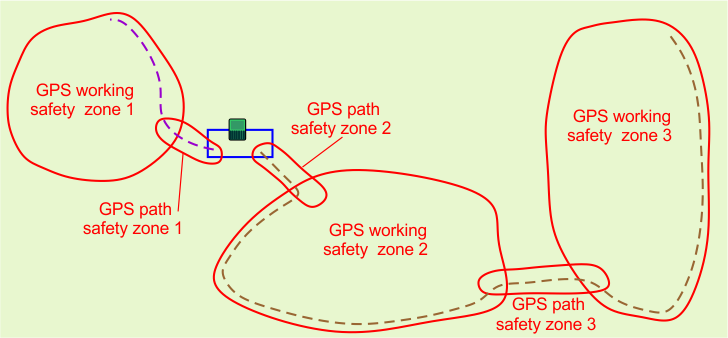
Bemærk: Ved klipning af skellet følger
robotten den samme retning, som blev brugt, da skellet blev registreret.
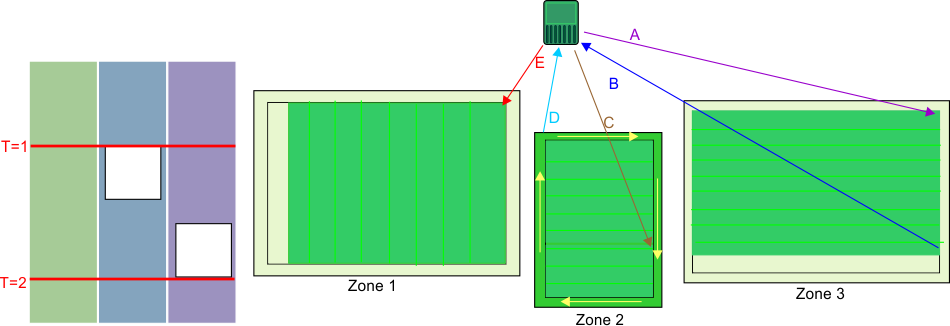
På tidspunktet T=1 vil robotten
flytte til zone 3 (A) og klippe der, indtil tidsplanen dikterer, at
zone 3 ikke er tilgængelig. Robotten
vender tilbage til stationen (B) og vender derefter tilbage for at
afslutte klipningen i zone 2 (C). Når græsset
i området er blevet klippet, klipper den skellet,
inden den vender tilbage til en station (D). Da zone 3 stadig ikke
er tilgængelig, vil den flytte til zone
1 og begynde at klippe i en ny retning (E).
På tidspunktet
T=2 er zone 1 ikke fuldført, når zone 3 bliver tilgængelig.
På tidspunktet T=2 vil robotten
fuldføre klipningen i zone 1 og derefter klippe skellet, før
den vender tilbage til stationen (A). Den
vil derefter vende tilbage til zone 3 (B) og afslutte klipningen af
zonen og skellet. Den vender tilbage til stationen
(C) og begynder derefter at klippe zone 2 i en ny retning
(D).
Bemærk: Det anbefales kraftigt at bruge
sekventiel planlægning. Hvis dette ikke bruges, er det nødvendigt
at definere den procentdel af tid, der
skal bruges på at arbejde i en bestemt zone, og udtrykkeligt
angive det antal gange om ugen, hvor skellet skal
klippes.