De eenvoudigste manier
om ervoor te zorgen dat elke zone en de grens ervan regelmatig wordt
gemaaid, is door sequentieel plannen te implementeren.
Wanneer sequentieel plannen wordt geïmplementeerd, werkt de robot
achtereenvolgens in elke zone en maait hij
de grens wanneer het maaien is voltooid. De robot werkt volgens het
gedefinieerde werkschema.
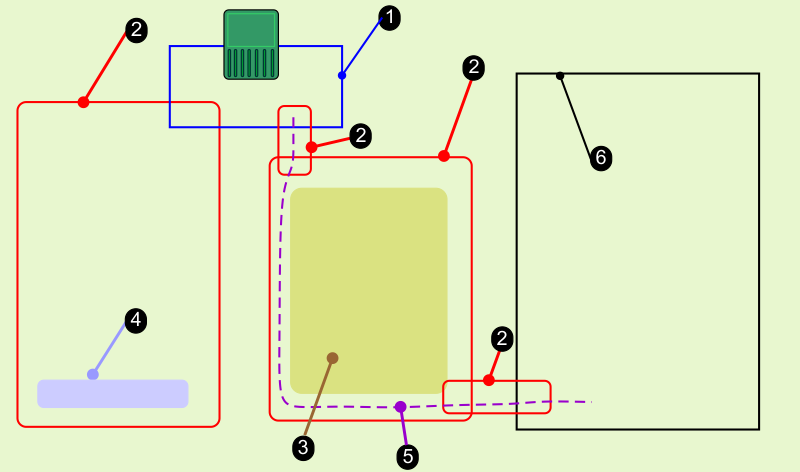
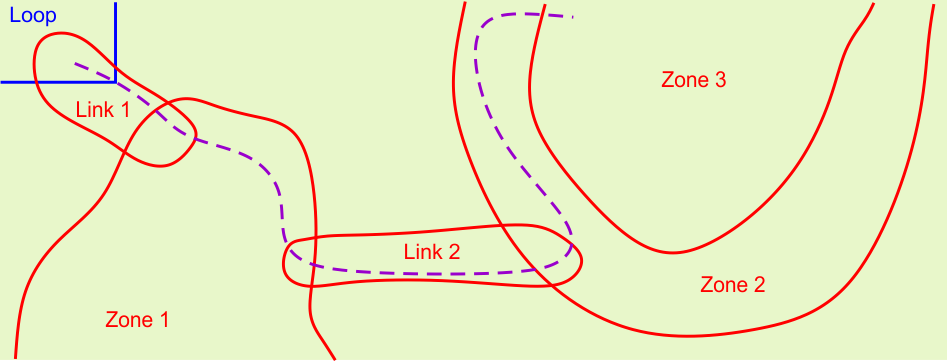
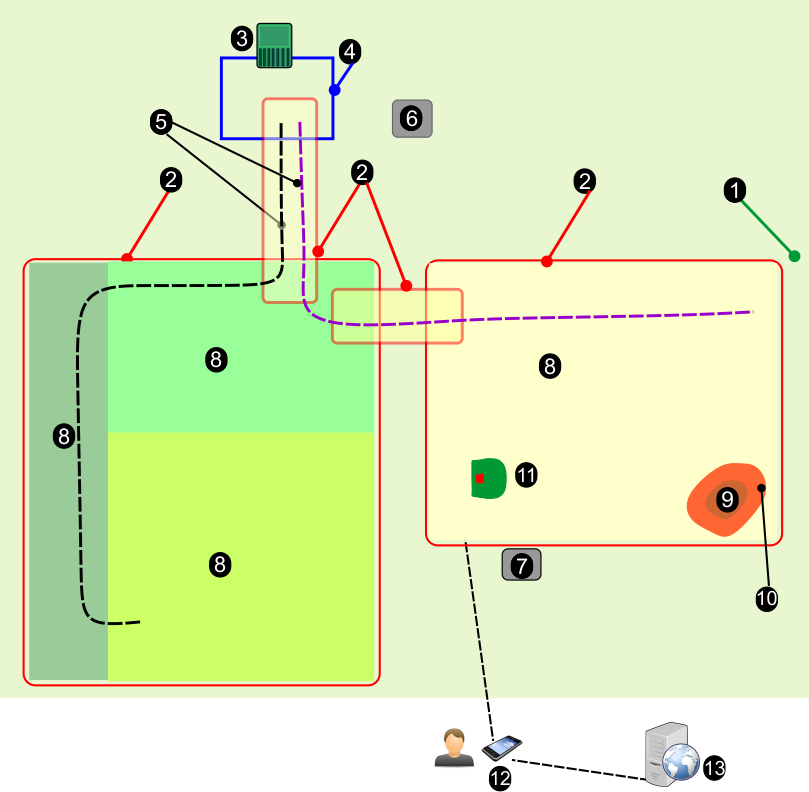
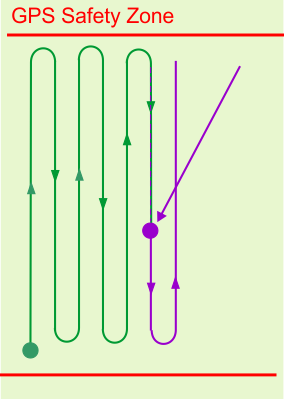
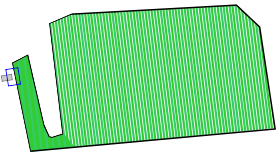
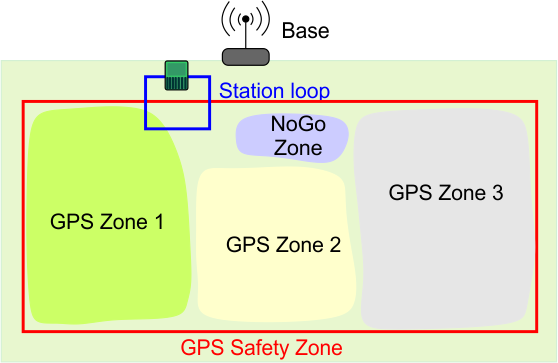
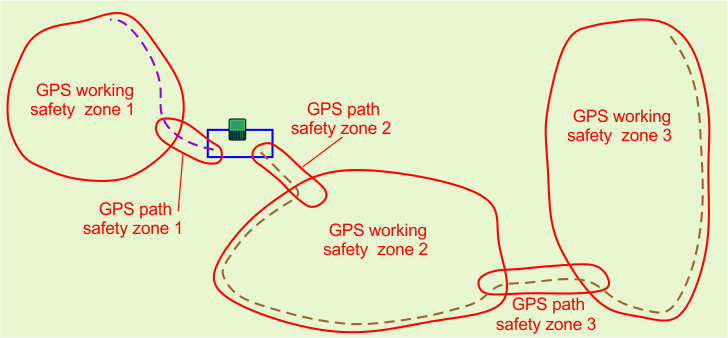
Het proces van sequentieel plannen
wordt weergegeven op de volgende afbeelding. Bekijk de installatie
met de drie afzonderlijke zones die moeten
worden gemaaid. Het gedefinieerde schema bepaalt dat zones 2 en 3
op bepaalde momenten van de dag niet beschikbaar
zijn.
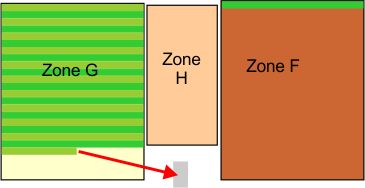
Op tijdstip T=0 start de robot
met het maaien van zone 1. Wanneer het hele gebied is gemaaid, maait
hij de grens en dan keert hij terug naar het
station (A). Vervolgens gaat hij naar zone 2 (B) en maait hij tot
tijdstip T=1, waarop volgens het gedefinieerde
schema zone 2 niet beschikbaar is. De robot keert terug naar
het station (C).
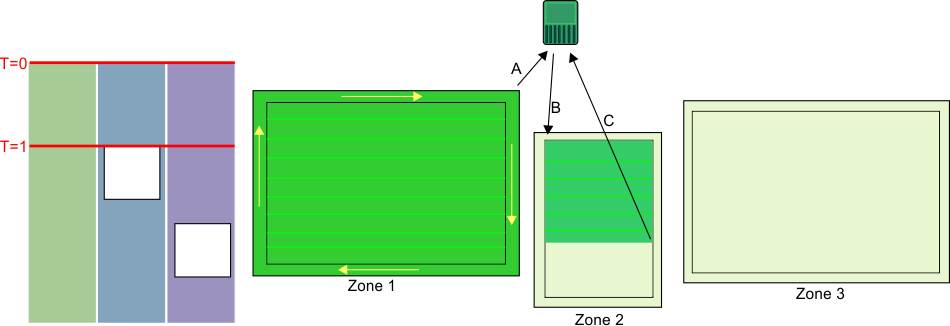
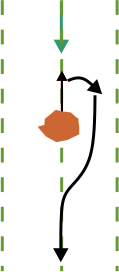
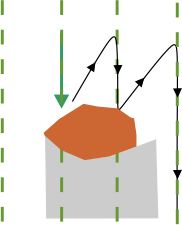
Opmerking: Bij het maaien van de grens volgt
de robot dezelfde richting als toen de grens werd ontdekt.
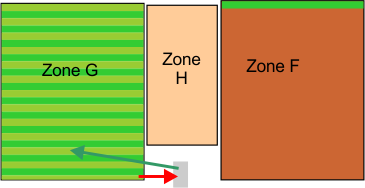
Op het tijdstip T=1 gaat de robot
naar zone 3 (A) en maait daar totdat volgens het schema zone 3 niet
beschikbaar is. De robot keert terug naar
het station (B) en keert vervolgens terug om zone 2 (C) af te maken.
Wanneer het gebied is gemaaid, maait hij de
grens voordat hij terugkeert naar een station (D). Aangezien zone
3 nog steeds niet beschikbaar is, gaat hij naar zone
1 en begint hij in een nieuwe richting te maaien (E).
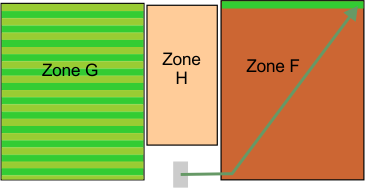
Op
tijdstip T=2 is zone 1 nog niet voltooid wanneer zone 3 beschikbaar
wordt.
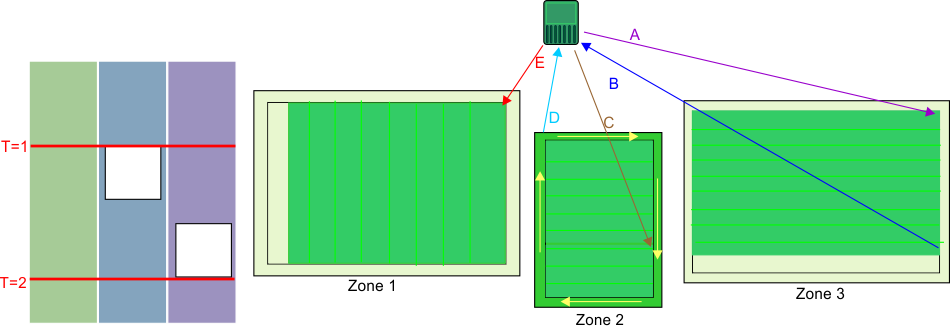
Op tijdstip T=2 voltooit de robot
het maaien van zone 1 en vervolgens maait hij de grens voordat hij
terugkeert naar het station (A). Dan keert
hij terug naar zone 3 (B) en voltooit hij het maaien van de zone en
de grens. Hij keert terug naar het station
(C) en begint dan met het maaien van zone 2 in een nieuwe richting
(D).
Opmerking: Het wordt sterk aanbevolen dat
u sequentieel plannen gebruikt. Als dit niet wordt gebruikt, is het
noodzakelijk om het percentage tijd dat
in een bepaalde zone moet worden gewerkt te definiëren en expliciet
aan te geven hoe vaak per week de grens moet
worden gemaaid.