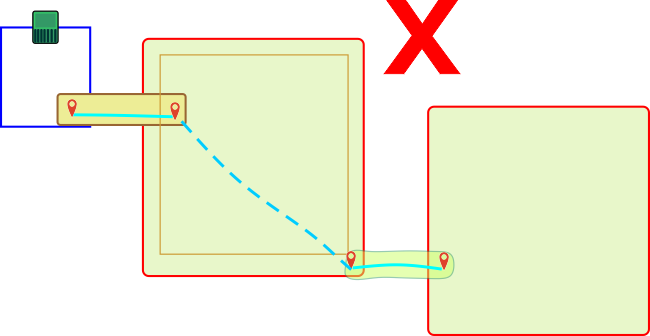
A forma mais
fácil de garantir que cada zona e o respetivo limite é cortado
com regularidade é implementando a programação
sequencial. Quando a programação sequencial
é implementada, o robô trabalhará separadamente em
cada zona e cortará os limites quando
o corte estiver concluído. O robô funciona em conjunto com
a programação de trabalho definida.
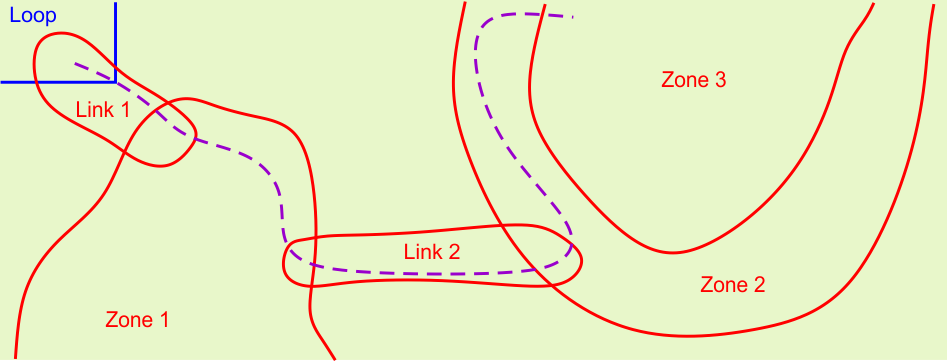
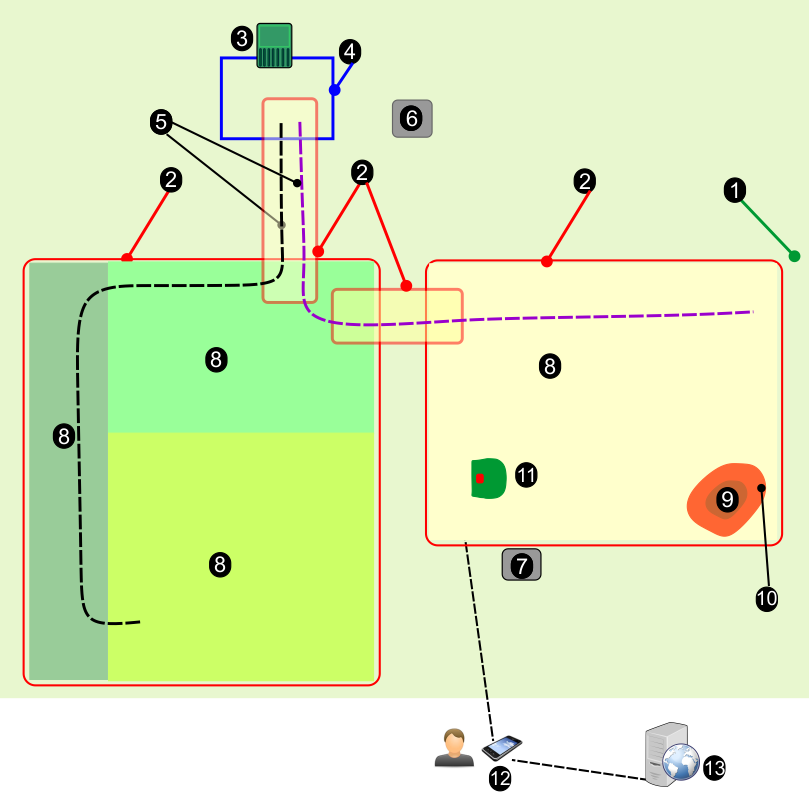
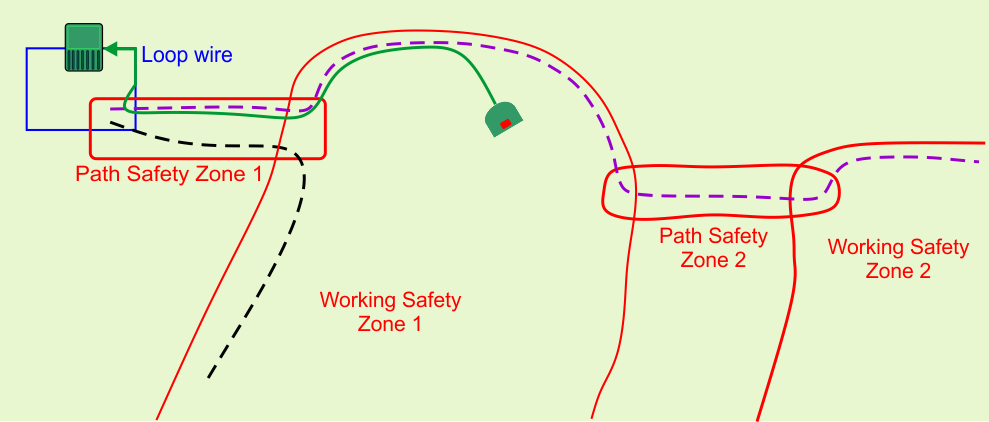
O processo
de programação sequencial é mostrado na figura seguinte.
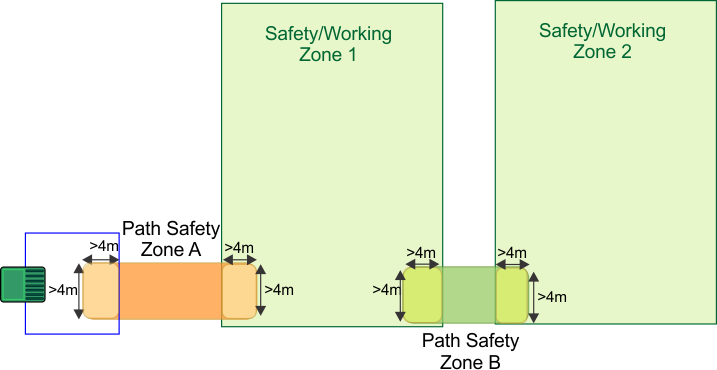
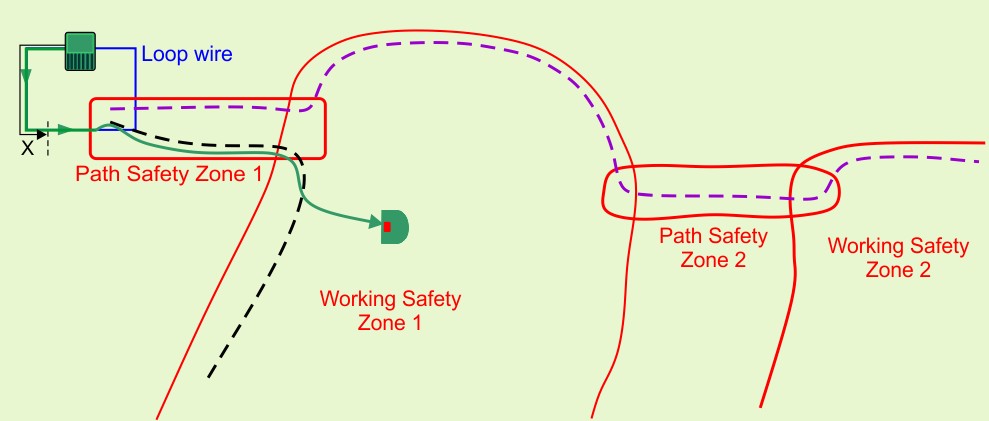
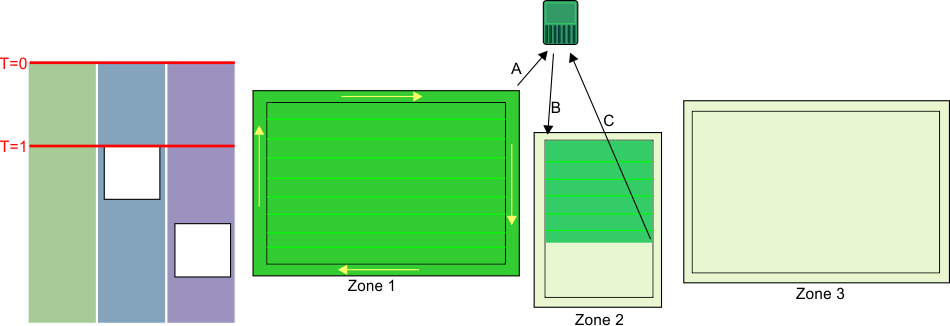
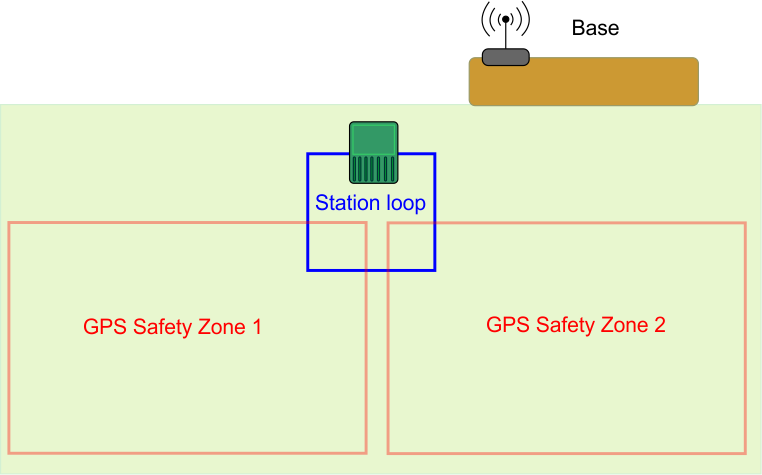
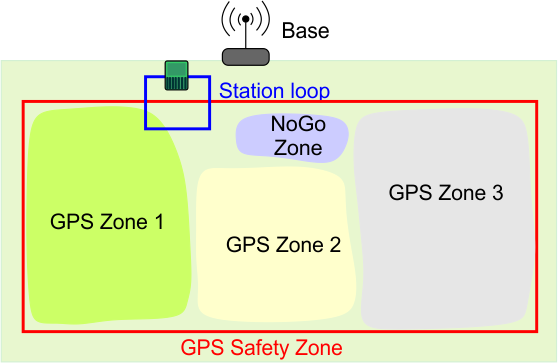
Considere a configuração da instalação com três
zonas separadas para serem cortadas. O programa
definido dita que as zonas 2 e 3 estão indisponíveis em
determinados períodos do dia.
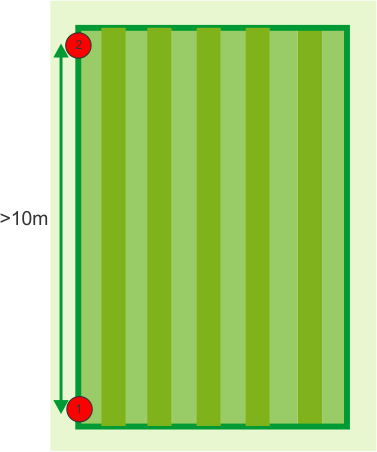
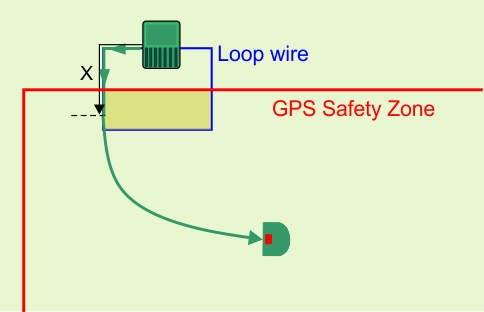
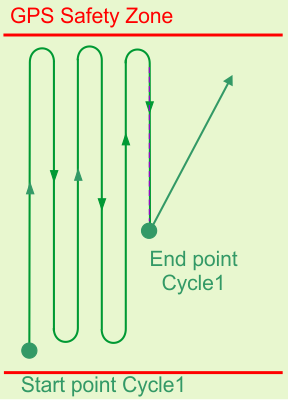
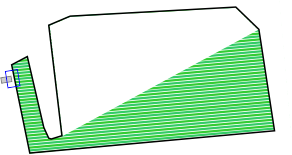
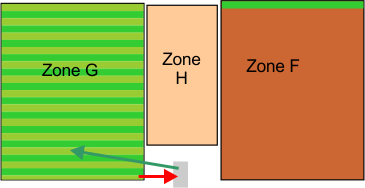
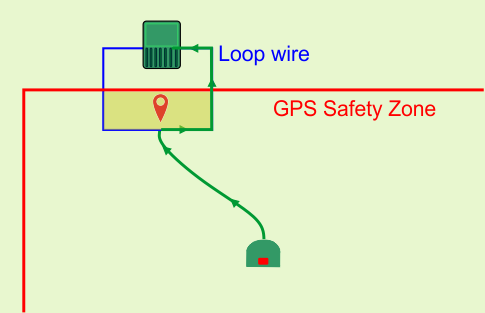
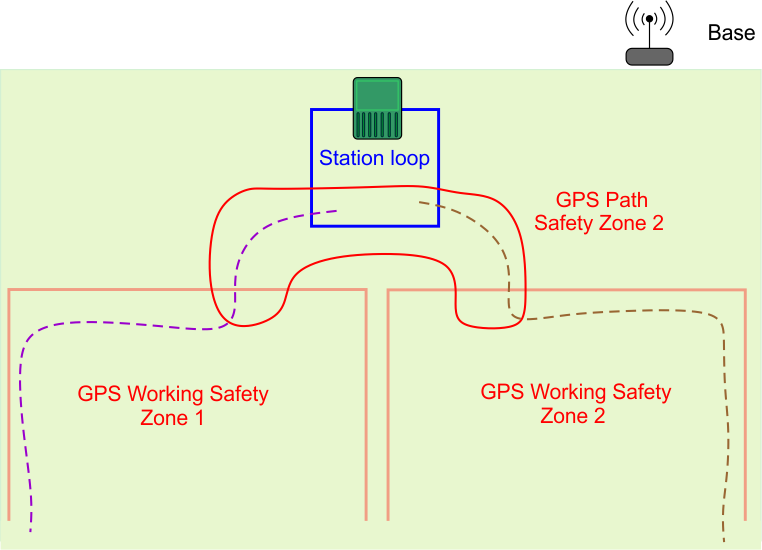
No momento T=0, o robô inicia
a zona de corte 1. Quando a área completa tiver sido cortada,
corta os limites e depois volta para a estação
(A). Depois desloca-se para a zona 2 (B), e corta até o período
T=1, altura em que a programação definida dita
que a zona 2 está indisponível. O robô
volta para a estação (C).
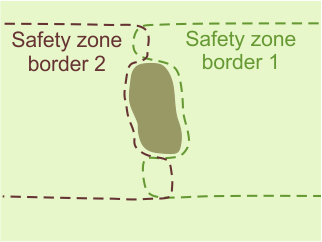
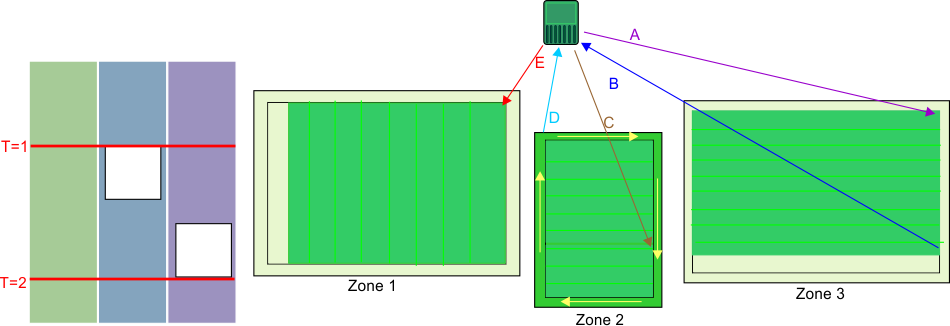
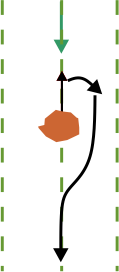
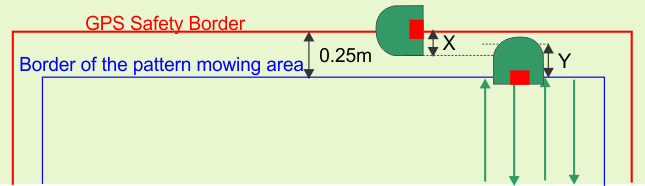
Nota: Quando corta os limites, o robô segue a mesma direção
utilizada quando os limites foram descobertos.
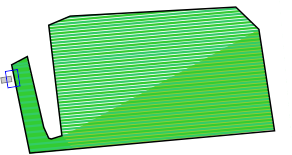
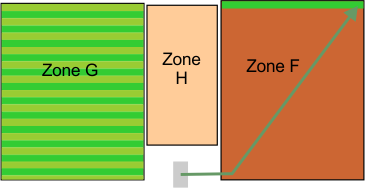
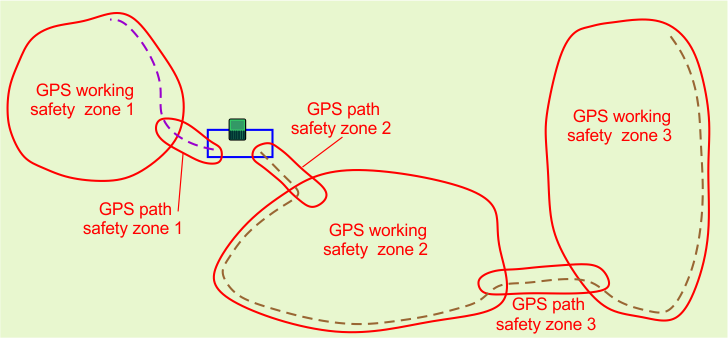
No momento T=1, o robô deslocar-se-á
para a zona 3 (A) e cortará nessa zona até a programação
indicar que a zona 3 está indisponível.
O robô voltará para a estação (B) e depois
voltará para concluir a zona de corte 2 (C). Quando a área
tiver sido cortada, cortará os limites
antes de voltar para uma estação (D). Uma vez que a zona
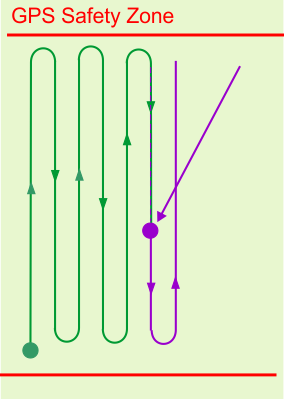
3 está indisponível, deslocar-se-á para a zona
1 e começará a corta numa nova direção
(E).
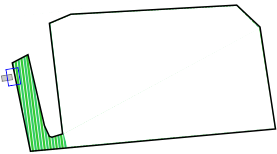
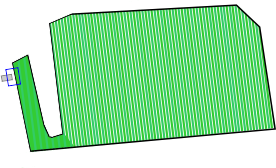
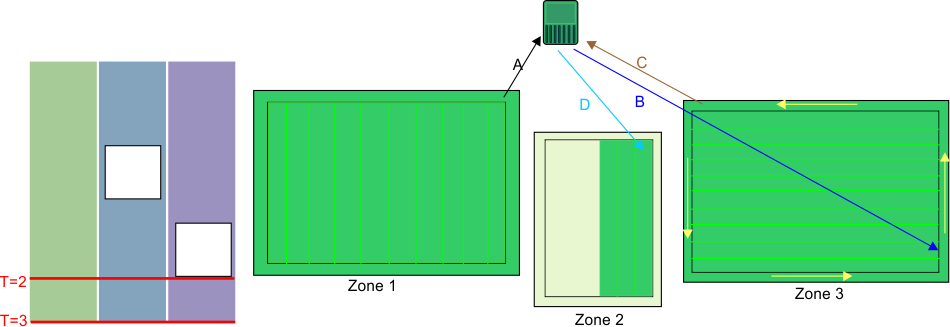
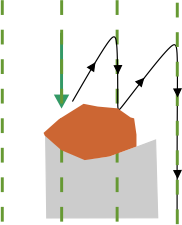
No período T=2, a zona 1
não está completa, quando a zona 3 fica disponível.
No período T=2, o robô
irá concluir a zona de corte 1 e depois cortará os limites
antes de voltar para a estação (A). Depois
voltará para a zona 3 (B) e concluirá o corte
da zona e dos limites. De seguida, voltará para a estação
(C) e começará a cortar a zona 2
numa nova direção (D).
Nota: É vivamente recomendado que utilize a programação
sequencial. Se não for utilizada, é necessário definir
a percentagem de tempo a ser gasto numa
zona em particular e o número de vezes por semana que o(s) limite(s)
deve(m) ser cortado(s).