4G RTKのインストール要件
4G RTKにより、ロボットはペリフェラルワイヤで定義されていないエリア内で作業できるようになります。このセクションでは、ロボットが4G RTKを使って動作するためのさまざまな要件について説明します。
RTK GPSの概要
- GNSS (全地球航法衛星システム) を使って衛星から取得されるGPSの測位データの標準精度は5 m~10 mです。これは、衛星から受信した信号が大気や環境条件によって歪むためです。RTK(リアルタイムキネマティック)技術を使うことで、より高精度な位置決めを実現できます。
- この技術には、衛星からGNSS信号を受信する、固定位置に配置されたRTKベースの使用が含まれます。ベースは固定されているため、受信するデータはその正確な位置に関連付けられます。
- ロボットにもアンテナが取り付けられており、位置を特定するために衛星からGNSS信号を受信します。RTKベースとロボットは両方とも、異なるグループ (GPS、GLONASS、Galileo、BeiDou) の衛星からGNSS信号を受信します。ただし、ロボットは移動しているため、位置の計算は固定ベースの場合よりも精度が低くなります。
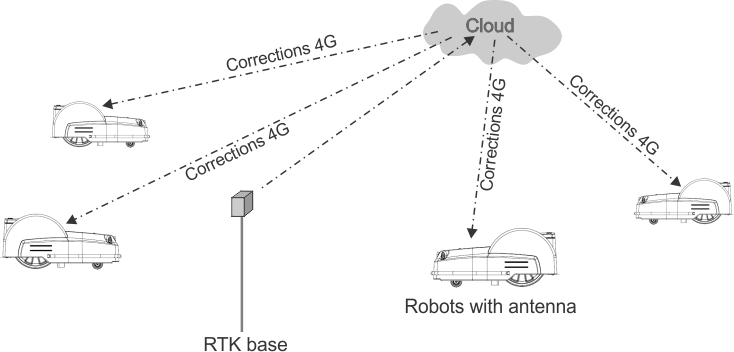
- RTKベースは、クラウドベースのサーバーを介して各衛星の補正データを計算し、それをロボットに送信します。ロボットはこれらの補正を使って位置精度を高めます。このような正確な位置決めにより、ロボットは定義されたパターンに従い、フィールドを直線状にカバーすることができます。
4G携帯電話サービスを使ってクラウド経由で修正を行うこともできます。この場合、補正データの転送が障害物により妨げられることはなく、ベースは最大15 kmの距離にあるロボットに接続でき、数の無制限はありません。
4G携帯電話を使った補正の転送サービス
G520851
1つのベースステーションから複数のロボットに補正を送信できますが、補正の一貫性を保つために、各ロボットは複数のベースステーションから補正を受信しないようにする必要があります。
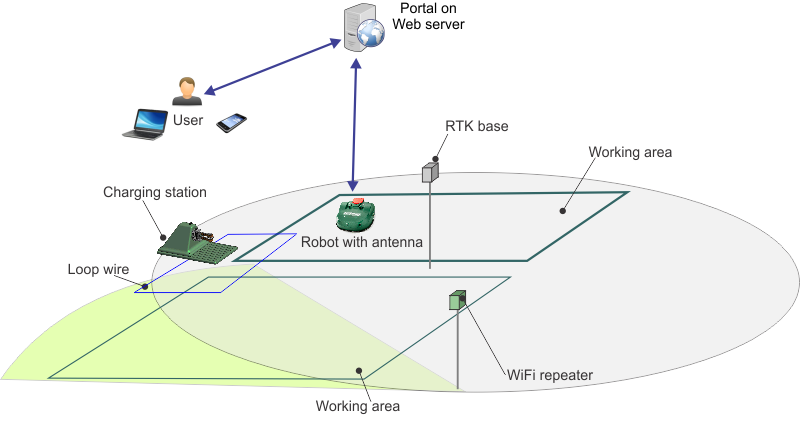
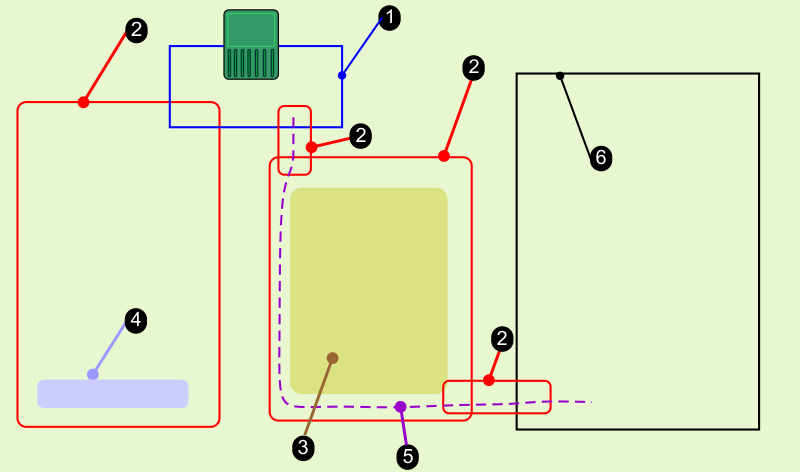
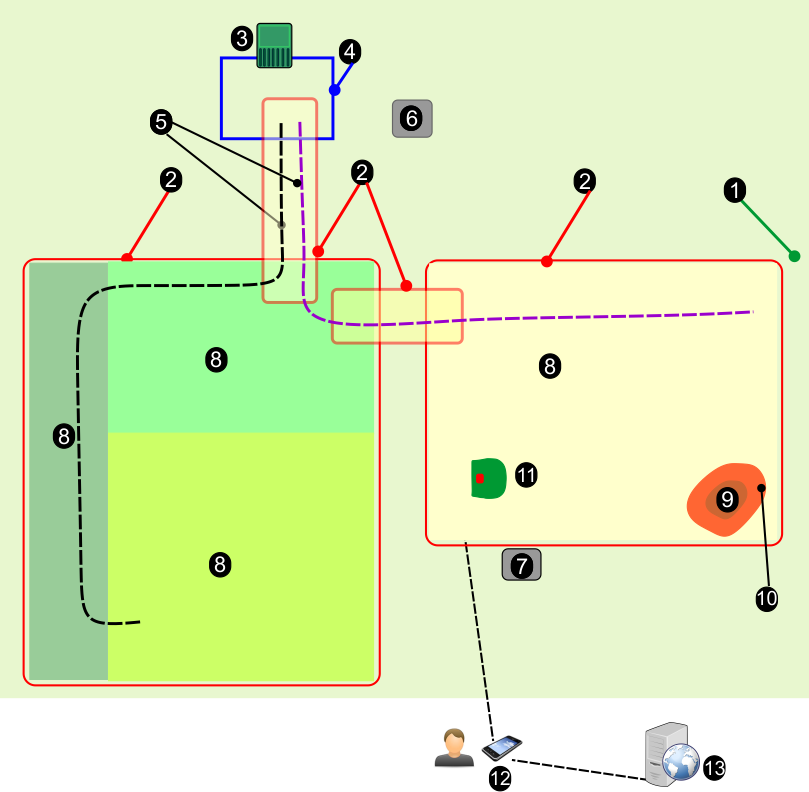
RTK GPS芝刈りシステムの基本コンポーネント
G520852
このトピックでは、ロボットの機械的特性について説明します。
ユーザーは、ユーザーインターフェイスを使ってロボットを直接制御できます。ウエッブサーバー上で実行されているポータルにロボットが登録されると:
- ロボットは情報をこのサーバーに送信し、ユーザーはそれを見ることができます。
- ユーザーはロボットにコマンドを送信し、そのパフォーマンスを評価し、構成を調整できます。
サイトの要件
GPS信号品質
サイトがワイヤレスインストールに適しているかどうかを判断する重要な基準は、GPS信号の品質です。
注: サイトの境界付近(GPS安全ゾーンの端沿い)のGPS信号品質は2である必要があります。
GPS信号が不十分なエリアでは、有線区画をインストールの一環として使うことができます。ナビゲーションパスを使うことで、他の作業ゾーンやステーションループとリンクできます。
GPS信号品質は刻々と変化します。それは気象条件、衛星群、現場の状況などの変数によって異なります。サイトを評価する際にはこの点を考慮することが重要です。
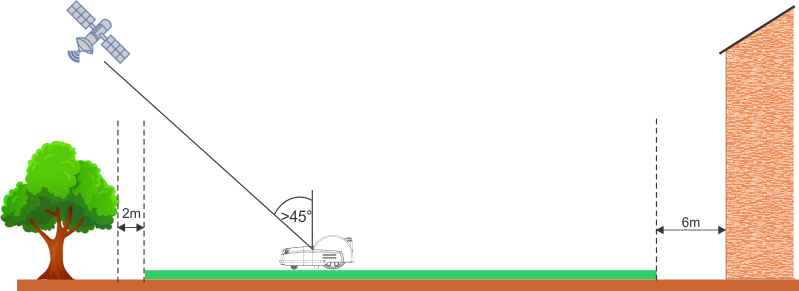
遮るもののない天空
注: 4G RTKを設置するには、ロボットとRTKベース上に遮るもののない天空があることが不可欠です。
木や建物は信号レベルを低下させることがあります。木々が葉を落としている冬の間は、木々に葉が茂りロボットが動作する必要がある夏よりも信号レベルが高い可能性があることに留意する必要があります。
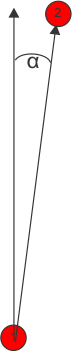
建物や木々までの必要距離は次の図に示されています。
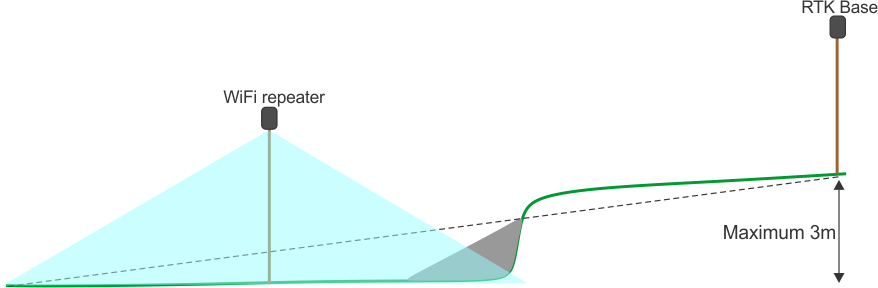
スロープ
GPS境界で許容される最大勾配は30% (17°)、または傾斜モデル (S) バージョンの場合は 45% (24°) です。
RTKのデータ修正がWi-Fiを使って転送されている場合、短くて急な斜面では問題が発生する可能性があります。これらにより、衛星信号を隠す影が発生する可能性があります。そのような状況では、Wi-Fiリピーターまたは4Gを使用することができます。
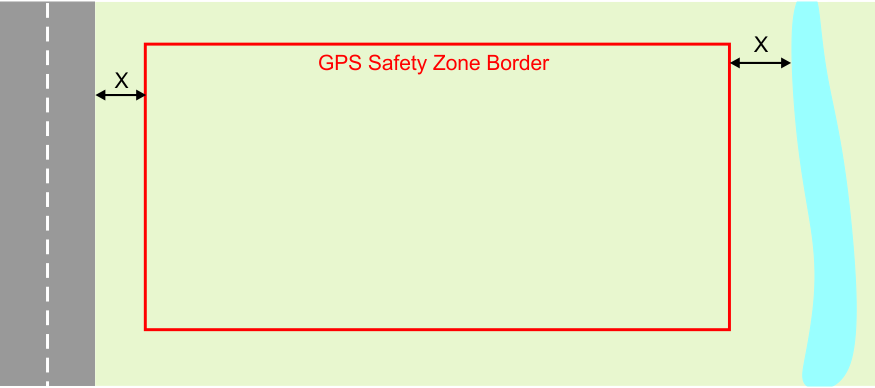
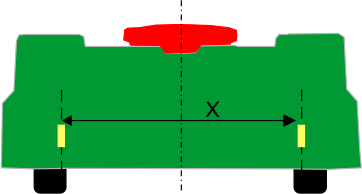
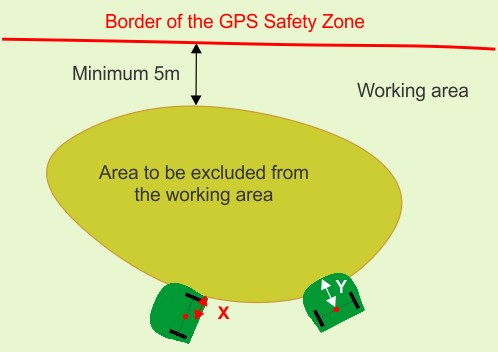
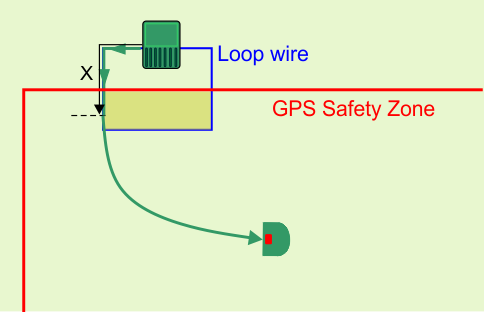
危険な物体からの距離
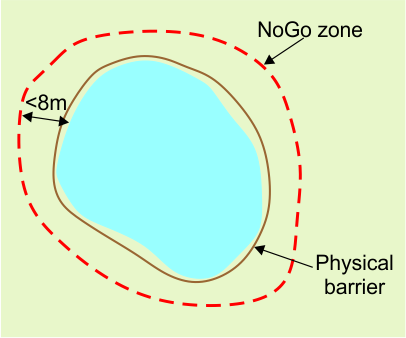
危険な物体とGPS安全ゾーンの境界 (X) 間の距離が下図のように8 m未満の場合、高さ15 cm以上の物理的な障壁を設置する必要があります。
危険な物体としては道路や水域などが挙げられます。
形状とサイズ
サイトの形状やサイズは、そのサイト内の安全ゾーンの複雑に比べると重要ではありません。GPSルートの計算は、作業領域全体、その形状、狭い通路、障害物、進入禁止ゾーンなどの複雑な部分が含まれているかどうかによって異なります。大規模で複雑なサイトは、複数の安全ゾーンを使うことで管理できます。
GPS信号要件
インストールに問題があると、ロボットが十分に高品質のGPS信号を受信できない可能性があります。次のセクションでは、さまざまな操作に必要な信号レベルと、必要な操作に対して信号レベルが低すぎる場合にロボットが実行するアクションを示します。
信号品質レベルは技術者メニュー(9)> GPS
RTKで確認できます。
リモートコントロールによる境界検出
必要な信号レベル: =>2.
ロボットのアクション:何もなし
スマートフォンアプリにポイントを登録できない旨のユーザー向けメッセージが表示されます。
境界の検証
必要な信号レベル: =>2.
ロボットのアクション:10分後、ロボットは次のメッセージを発します。「正確な位置が失われました。リファレンスベースステーションとの接続をチェックする。」
GPSナビゲーション
この操作は、ロボットがGPSナビゲーションを使って、進入禁止ゾーンの有無にかかわらずステーションから出発したり、ステーションに戻ったりすることを指します。
必要な信号レベル: =>2.
GPS信号品質レベルは2以上である必要があります。
ロボットのアクション:
- 5分後にロボットはRTKモジュールを再起動します。
- 30 分後にロボットは回転してアンテナを衛星に向けるようにします。
- 3時間後にアラームが鳴ります。
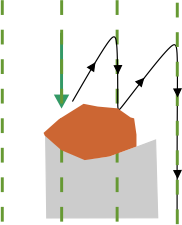
パターン作業用のためステーションを出る
これは、ロボットがステーションのループワイヤーに沿ってステーションから出ていくことを指します。
必要な信号レベル: >1.2.
ロボットのアクション:
- 5分後にロボットはRTKモジュールを再起動します。
- 3時間後にアラームが鳴ります。
ステーションループから離れて作業を始める
これは、ロボットがステーションのループワイヤを離れ、パターンモードで作業を開始することを指します。
必要な信号レベル: =>2.
ロボットのアクション:10分後、ロボットはステーションのループワイヤを使ってステーションに戻り、作業を再開しようとします。
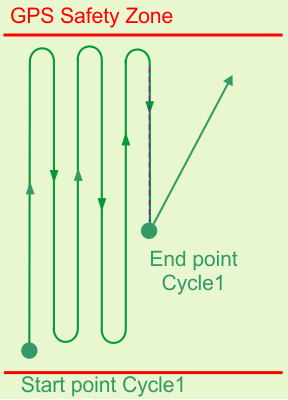
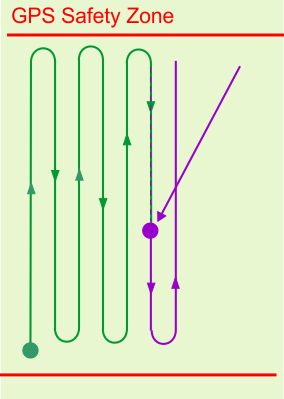
4G RTK GPSゾーン
物理的なペリフェラルワイヤーがない場合、作業ゾーンはGPS座標によって定義されます。
G527699
-
ループワイヤー
-
GPS安全ゾーンこれらはロボットの作業領域全体をカバーし、内部作業領域やパスを囲むこともできます。
-
ロボットが異なる時間と異なる条件下で動作できる内部GPSゾーン。
-
ロボットが作業できない進入禁止ゾーン。
-
GPS安全ゾーン内にあるパス。
-
4G RTKゾーンに対してGPS信号が不十分な領域で使える有線ゾーン。
サイトレイアウト
ロボットが動作するエリアは、ペリフェラルワイヤまたは4G RTKを使って境界を定義できるGPS安全ゾーンによって定義されます。さらに、刈り取りの頻度、パターン、その他のユーザー入力を制御するために内部GPS作業ゾーンを作成することもできます。
ステーションループワイヤー
ロボットが充電ステーションとドロップピットステーションにアクセスできるようにするには、有線ステーションループを使う必要があります。複数のボール収集ロボットが動作している場合、ビジーループが必要になる場合があります。
GPSセーフティ
ゾーン
これは、ペリフェラルワイヤで囲まれたロボットの作業領域の外側のエンベロープを定義します。ロボットがこのゾーンの外側に移動しないことが重要です。
- 少なくとも1つのゾーンを設定して、GPS安全ゾーンとして指定する必要があります。
- 安全ゾーンは、作業領域またはパスを囲むために使うことができます。
- 複数の安全ゾーンを定義できます。移動の目的上、それらは互いに交差する必要があります。
- 少なくとも1つはステーションループワイヤと交差する必要があります。
- 安全ゾーンは境界検出のプロセスによって定義されます。検出後は安全ゾーンを検証し、確認する必要があります。
- ウエッブポータルで「技術者のユーザーロール」を持つユーザーのみがGPS安全ゾーンを定義できます。
- 安全ゾーンを定義するために使われる構成パラメータが登録されます。これらのパラメータに変更を加える場合は、検証と確認が必要です。
- パラメータの変更が検出された場合(ベースの位置が変更された場合など)、またはベースステーションへの接続が失われた場合、ロボットは動作を停止します。
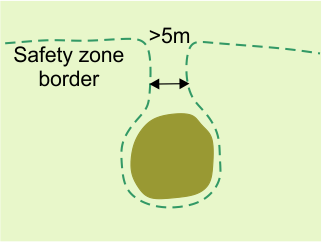
- 単一ゾーンが安全ゾーンの端の間の狭い通路を含んでいる場合、その通路の幅は少なくとも5 mは必要です。
内部GPS作業ゾーン
- ロボットの動作を最適化するために、ロボットが特定の時間と頻度で動作する内部GPS動作ゾーンを任意の数定義できます。
- さまざまなゾーンの刈り高さは、周囲の安全ゾーンに設定されている高さと同じです。
- これらの内部ゾーンはすべて、全体的なGPS安全ゾーン内にある必要があります。
- それらを境界検出プロセスによって定義する必要はありません。これらは、ロボットにアクセスできるあらゆるタイプのユーザーがウエッブポータルで定義および編集できます。
進入禁止ゾーン
進入禁止ゾーンは、通常は障害物の周囲の、ロボットが立ち入ることができない領域です。
- 進入禁止ゾーンは境界検出のプロセスによって定義される必要があります。
- これらは、技術者の役割を持つユーザーのみが定義または変更できます。
- 境界は検証され、確認されなければなりません。
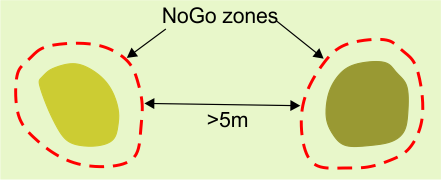
- 進入禁止ゾーンは、安全ゾーンの端から、またお互いから少なくとも5 m離れている必要があります。
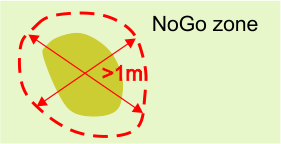
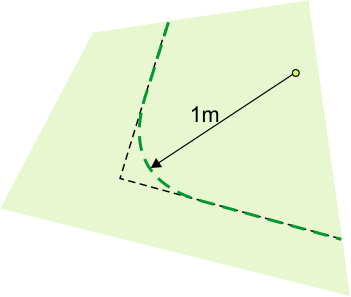
- 進入禁止ゾーンは、全方向とも最低1メートルの幅が必要です。
- 長い進入禁止ゾーンは最低5メートルの幅が必要です。
GPSパス
パスは、別々の作業領域を接続する便利で効率的な手段です。これらの作業ゾーンは、有線区画または4G RTKゾーンにすることができます。パスで接続できるゾーン数の制限はありません。
有線の区画
GPS信号の品質が不十分で4G RTKゾーンを利用できない領域では、有線区画を使用できます。
ステーションとループ
ロボットがステーションから出て戻ることができるように、ステーションの周囲に少なくとも1本のループワイヤを設置する必要があります。1つのGPSゾーンはステーションループワイヤと交差する必要があります。作業領域には複数のGPS安全ゾーン (および有線区画) が含まれる場合がありますが、ステーションループと交差する必要があるのは1つのゾーンだけです。ただし、複数のゾーンがステーションループと交差することは可能です。
このセクションでは、4G RTKを使う場合のループに関連する重要な寸法を定義します。
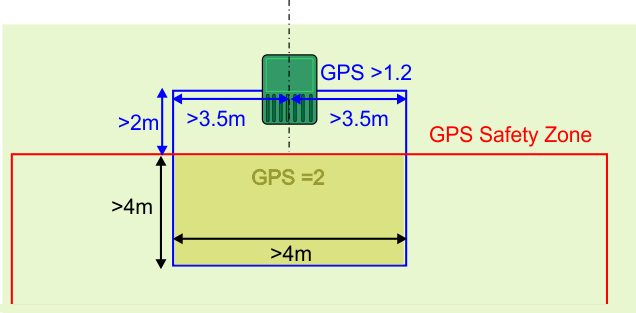
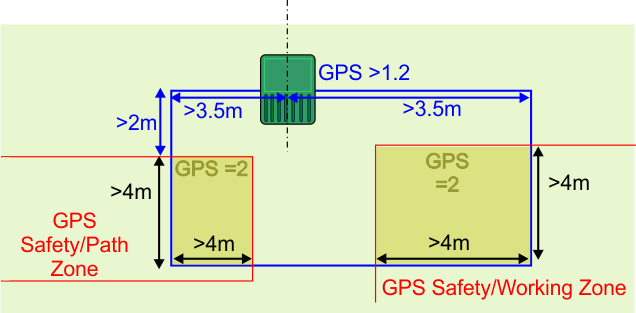
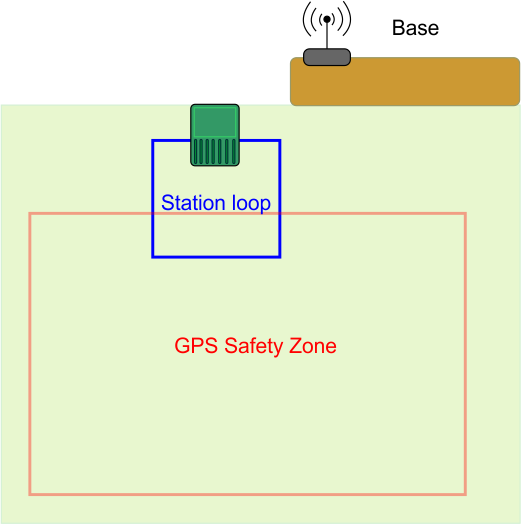
シングルGPS安全ゾーのあるンシングルループ
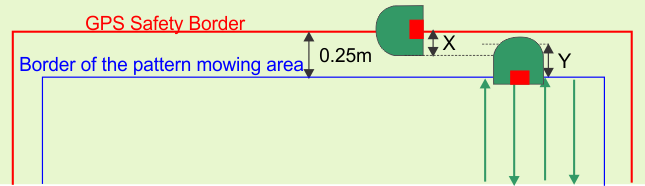
以下の条件が適用されます:
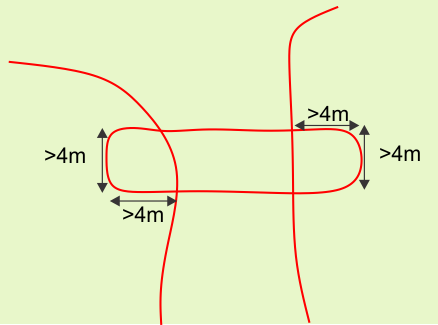
- ステーションループはGPS安全ゾーンと交差し、その隣接する区画として設定する必要があります。
- ステーションループは、GPS安全ゾーンと少なくとも4 m両方向にオーバーラップする必要があります。
- ロボットがステーションにいるときに検出する信号レベルは、少なくとも1.2である必要があります。
- オーバーラップ内の信号レベルは2である必要があります。
- 入力側と出力側の直線ワイヤの長さは3.5 m以上にする必要があります。
- ステーションとGPS安全ゾーン(幅)間の距離は2 m以上である必要があります。
オーバーラップ内にGPSリターンポイントを定義する必要があります。
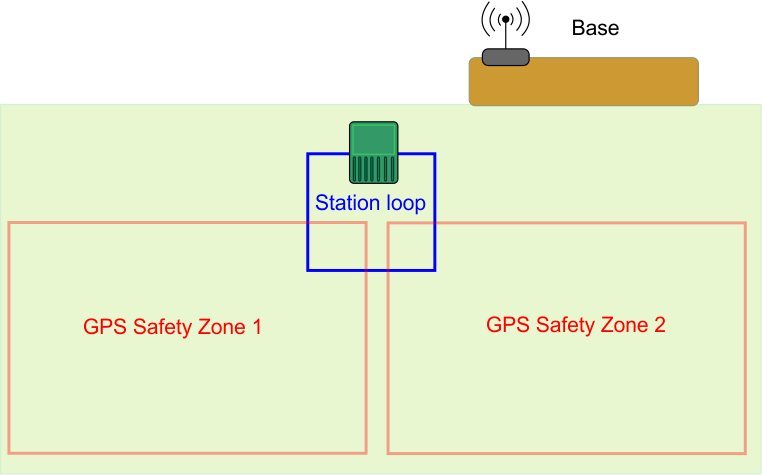
複数のGPS安全ゾーのあるンシングルループ
複数の安全ゾーンをループワイヤに接続できます。これは複数の作業ゾーン、またはパスを囲む安全ゾーンである場合があります。
以下の条件が適用されます:
- ステーションループは、各GPS安全ゾーンと交差する必要があります。それぞれをループに隣接する区画として設定する必要があります。
- ステーションループは、各GPS安全ゾーンと少なくとも4 m両方向にオーバーラップする必要があります。
- ロボットがステーションにいるときに検出する信号レベルは、少なくとも1.2である必要があります。
- オーバーラップ内の信号レベルは2である必要があります。
- 入力側と出力側の直線ワイヤの長さは3.5 m以上にする必要があります。
- ステーションとGPS安全ゾーン(幅)間の距離は2 m以上である必要があります。
- ロボットがステーションループにつながるメカニズムを定義する必要があります。これはGPSリターンポイントまたはパスになります。
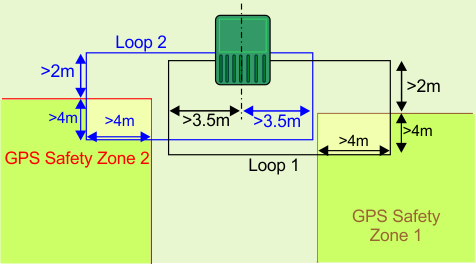
複数のループ
複数のループがステーションに接続されていても、必要な信号レベルは前のセクションに示した単一のループの場合と同じです。ループワイヤに関連する寸法を以下に示します。
- 各ループはGPS安全ゾーンと交差し、その隣接する区画として設定する必要があります。
- ステーションループは、GPS安全ゾーンと少なくとも4 m両方向にオーバーラップする必要があります。
- ロボットがステーションにいるときに検出する信号レベルは、少なくとも1.2である必要があります。
- オーバーラップ内の信号レベルは2である必要があります。
- 各ループの入力側と出力側の直線ワイヤの長さは3.5 mを超える必要があります。
- ステーションとGPS安全ゾーン間の距離は2 m以上である必要があります。
- 各オーバーラップ内にGPSリターンポイントを定義する必要があります。
- 異なるステーションループに隣接する信号チャネルを使わないでください。
- ワイヤーはねじってはいけません。
- 各ループは単一ワイヤで構成する必要があります。
- ループ1とループ2のワイヤーは、充電ステーションの入口と出口の同じ地面のスロットに配置できます。
パスに関する要件
パスは、別々の作業領域を接続する便利で効率的な手段です。これらの作業ゾーンは、有線区画または4G RTKゾーンにすることができます。パスで接続できるゾーン数の制限はありません。
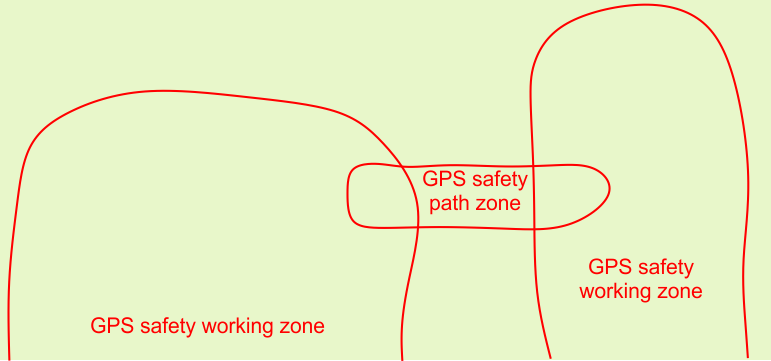
パスはGPS安全ゾーン内に囲まれている必要がある
上の図では、2つのGPSゾーンをリンクするパスを囲む特定のGPS安全ゾーンが作成されています。
パスごとに個別の安全ゾーンを作成することを推奨します。ゾーンを作成する領域ではGPS信号レベル2が必要です。
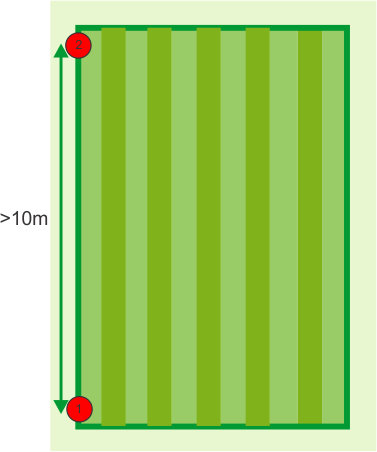
パスには定義された幅があります。最小値はロボットの幅です。最大値は10 mです。ロボットが経路に沿って移動しているとき、草地に跡が残るリスクを減らすために、経路の開始と終了の間をランダムに結びます。
周囲のゾーンの幅はそのパスに対応する必要があります。ただし、パスの幅が許容する場合でも、ロボットは周囲のゾーンの外に出ることはありません。パスにより、ロボットは比較的狭い通路に沿って移動できるようになります。
ロボットがパスに沿って移動するときの最高速度とカッティングヘッドの動作を設定することにより、狭く困難な通路でもゾーンを接続できるようにすることができます。
これらのGPS安全パスゾーンは、すべてのGPS安全ゾーンと同じ方法で作成および検出されます。
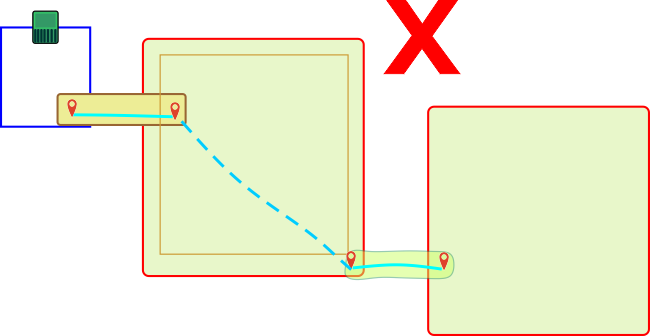
パスは接続ゾーンと重なる必要がある
上図に示すように、パス ゾーンは両方の作業ゾーンと重なっています。重なり合う寸法は少なくとも4 m x 4 mである必要があります。
パスゾーンがGPS安全ゾーンと重なっている場合は、ゾーンを隣接として設定する必要はありません。
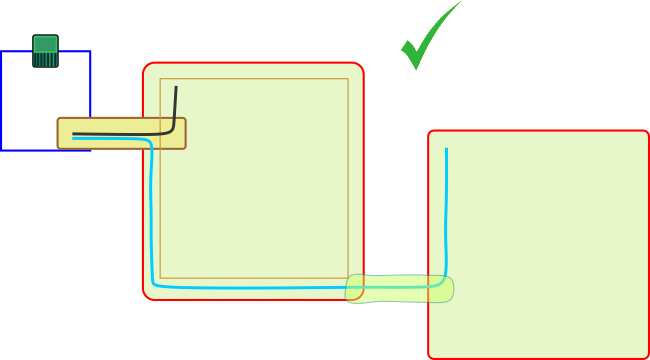
パスは無線と有線の区画を接続できる
パスを使って無線ゾーンと有線ゾーンを接続できます。すべての4G RTK設置では、ステーションはループワイヤで囲まれている必要があります。
GPS信号レベルが4G RTKゾーンを使うのに十分でない領域では、有線作業ゾーンを使うこともできます。
いずれの場合も、パスゾーンは作業ゾーンと4 m x 4 mの幅でオーバーラップする必要があります。
パスゾーンが有線ゾーンとオーバーラップする場合は、上の図に示すように、パスゾーンを隣接区画として設定する必要があります。GPSパスゾーンが他のGPS安全ゾーンとオーバーラップしている場合、ゾーンを隣接として設定する必要はありません。
パスを検出する
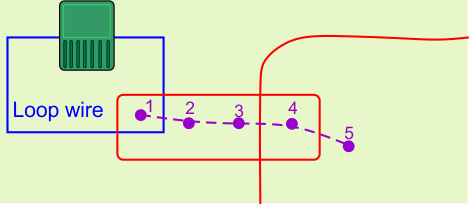
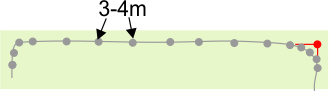
パスはのGPSウェイポイントのつながったものです。これらは、ゾーンの境界を検出するときのような検出プロセスによって定義されます。以下の条件が適用されます:
- ループ区画を接続するパスを検出する場合、最初に検出されるポイントは、ループワイヤとGPSパス安全ゾーンのオーバーラップ領域内にある必要があります。
- 2番目のポイントはループワイヤの外側に配置する必要があります。
- パスを検出するときにポイントを追加しすぎないでください。直線部分では、ポイント間の距離は3〜4メートルで十分です。曲線部分では、ポイント同士の距離を近づける必要があります。ポイントの数を制限することで、ロボットの移動がスムーズかつ高速になります。
- パス上の少なくとも1つのポイントは、接続するオーバーラップゾーン内にある必要があります。
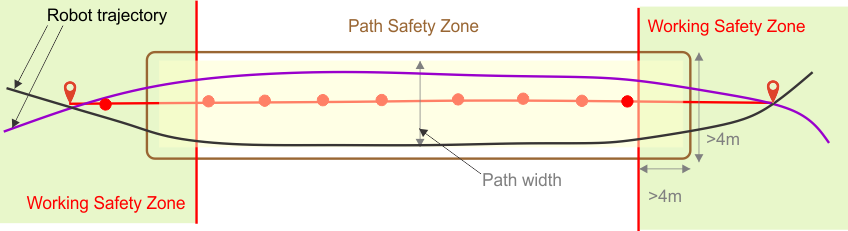
パスの設計
パスを開発するときは、セグメントに分割されたパスではなく、単一の長いパスを使うことを推奨します。これを次の図に示します。
ロボットはGPSナビゲーションを使って、1つのパスの終了から別のパスの開始まで移動するため、セグメントに分割されたパスは推奨されません。ロボットは常にまったく同じルートをたどるので、草の中に跡が残る恐れがあります。
また、パスをターゲットの作業ゾーンまで十分に延長することも推奨されます。これにより、ロボットがステーションに戻る必要があるときに使う経路が大幅に改善されます。
同じゾーン内に複数のパスを設定できます。ロボットは利用可能なパスとターゲットゾーンに応じて経路を自動的に最適化します。
パスゾーンの自動検出
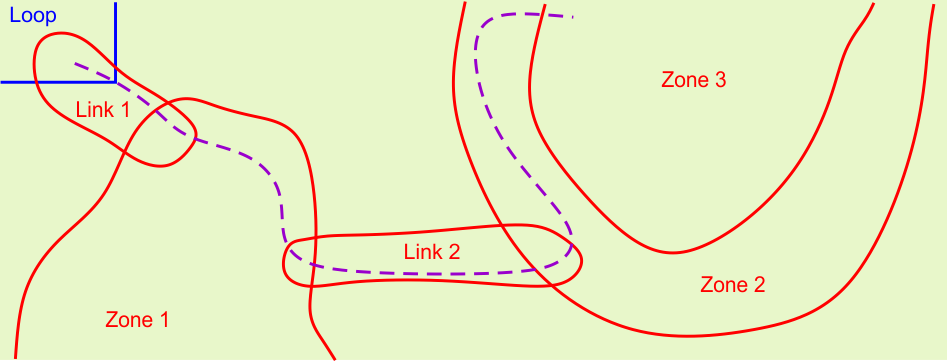
以下に示すパスは複数のゾーンを通過します。ロボットは通過するゾーンを自動的に認識します。
このリストは、ポータルで表示されるときにパスの特性の一部として表示されます。この例では、パスは次のように特徴付けられます:
- 区画から:ループ
- 区画へ:リンク 1、ゾーン 1、リンク 2、ゾーン 2、ゾーン 3
RTKベース
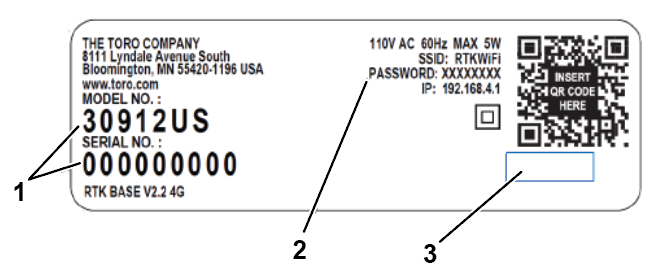
RTKベースは、Wi-Fi または4Gを使ってデータ修正をロボットに送信することができます。インストールの要件と構成は、使用方法によって異なります。これら各ベースの詳細については、対応するベースマニュアルに記載されています。
基本マニュアルには以下が含まれます:
- ベースとその運用機能の説明。
- インストールの要件と手順。
- ベースをトラブルシューティングする。
- Wi-Fiリピーターに関する情報。
障害物に関する要件
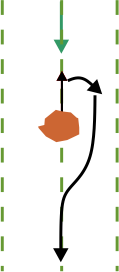
ロボットはセンサーで一時的な障害物を検出します。このトピックは、ロボットが作業パターンを計算する際、および作業中に回避しなければならない恒久的な障害物を取り扱います。
このような障害物はすべてGPS安全ゾーンまたは進入禁止ゾーンで囲まれている必要があり、どちらも安全な境界と見なされます。
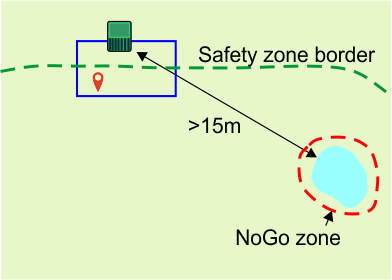
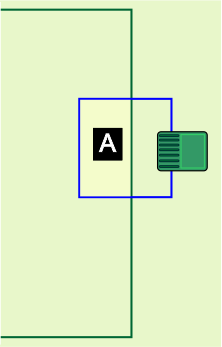
充電ステーション
ステーションは障害物から少なくとも15メートル離れている必要があります。
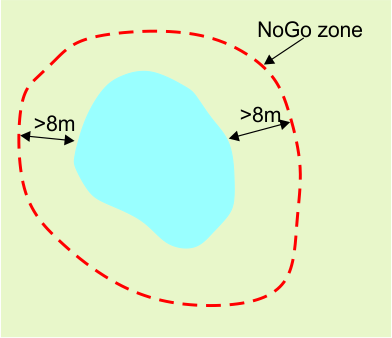
水域
水域はロボットにとって特に危険なので、進入禁止ゾーンまたは安全ゾーンで囲む必要があります。
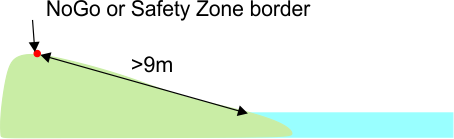
進入禁止ゾーンまたは安全ゾーンの境界は、水域端から少なくとも8メートル離れている必要があります。
地面が水域に向かって傾斜している場合は、安全ゾーンまたは進入禁止ゾーンの境界と水域端の間に少なくとも9メートルの距離が必要です。
水域と進入禁止ゾーンとの間に8メートル以上の距離を確保できない場合は、水域の周囲に高さ15センチ以上の物理的な障壁を設置する必要があります。
障害物に関する寸法
進入禁止ゾーンは、全方向に少なくとも1メートルの幅が必要です。
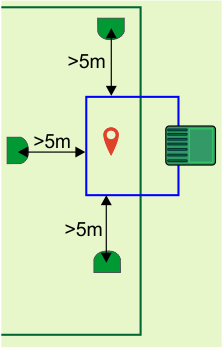
進入禁止ゾーン間の最小距離はも5 mです。
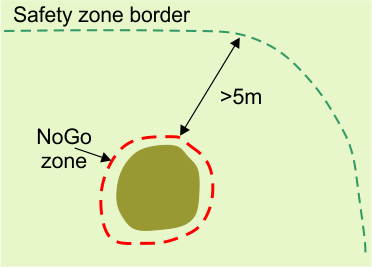
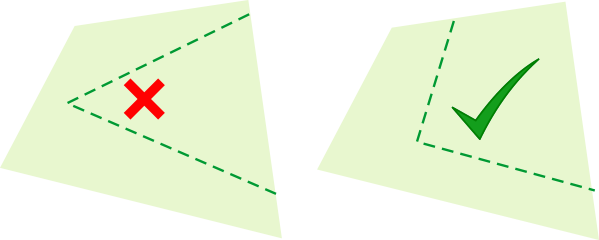
進入禁止ゾーンは、ロボットが作業する安全ゾーンの境界から少なくとも5メートル離れている必要があります。
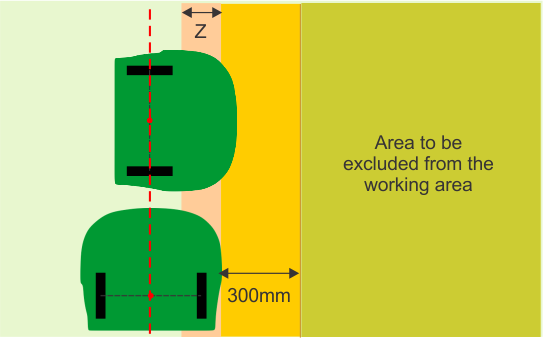
ロボットが作業している安全ゾーンの境界から障害物までの距離が5 m未満である場合、安全ゾーンの境界を障害物が迂回されるように調整する必要があります。次の図に示す配置では、安全ゾーンの境界が障害物の周りを取り囲んでいます。
障害物に近づく境界部分と障害物から離れる境界部分の間には、最低5 mの距離が必要です。つまり、ロボットが作業しない領域が少なくとも5 mの幅で存在することになります。これを解決するには、2つのオーバーラップする安全ゾーンを使うことができます。
4G RTKユースケース
ロボットがステーションにアクセスするには、ステーションループが必要です。少なくとも 1つのGPS安全ゾーンがステーションループに接続されている必要があります。
注: 4G RTKの設置では、作業ゾーンと進入禁止ゾーンを利用可能にするには、GPS信号レベル2が必要になります。
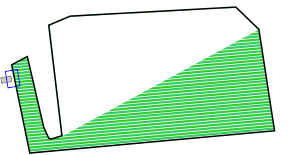
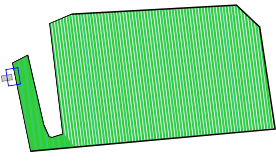
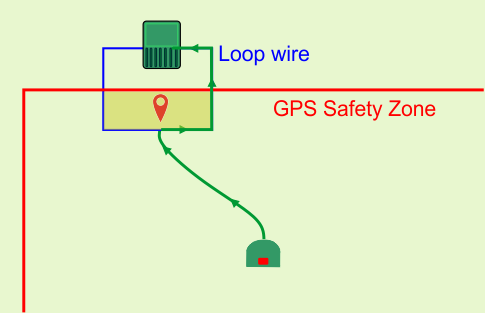
1つのGPS安全ゾーン
- サイトは開けています。ロボット、基地、衛星の間の視界を遮る木はありません。
- サイト全体のGPS信号レベルは2です。
- ベースは建物の高さ4 mの所に設置できます。
- GPS安全ゾーンは、ステーションループワイヤと少なくとも4 m x 4 mの幅で交差します。ループは安全ゾーンに隣接する区画として設定されます。
ループに接続された2つのGPS安全ゾーン
- 2つのGPS安全ゾーンが定義されており、それぞれがステーションループと4 m x 4 mの幅で交差します。どちらの場合も、ループは安全ゾーンに隣接する区画として設定する必要があります。
- 修正にWi-Fiを使っている場合は、リピーターを使う必要がある場合があります。
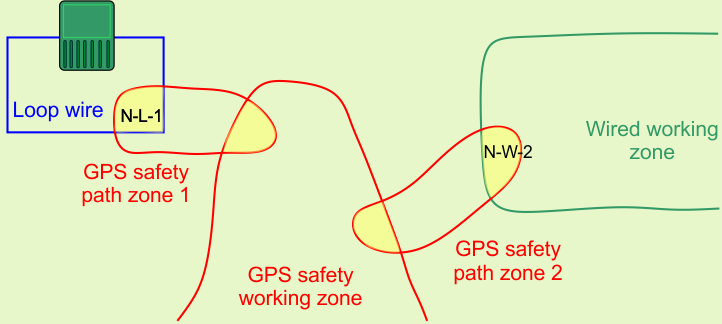
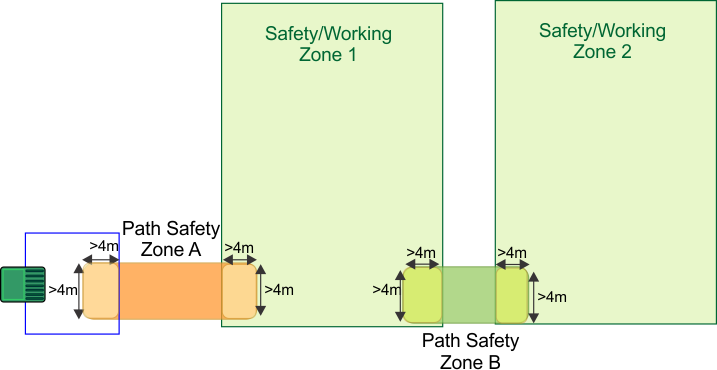
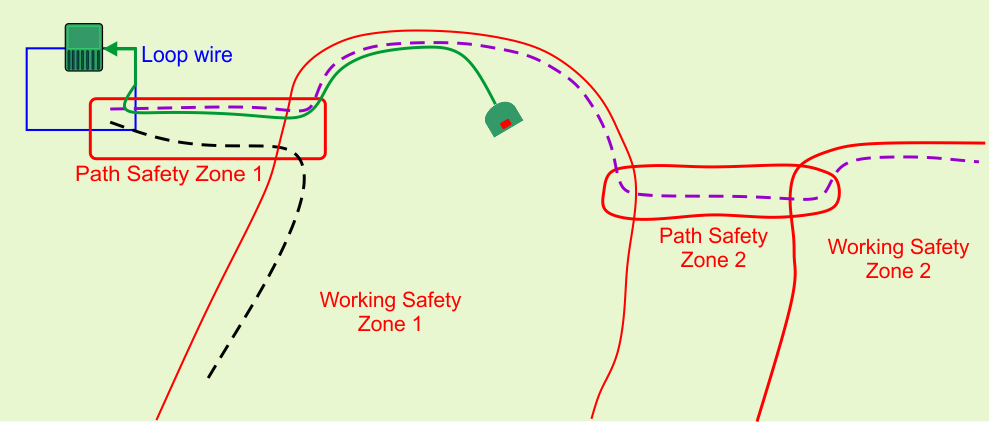
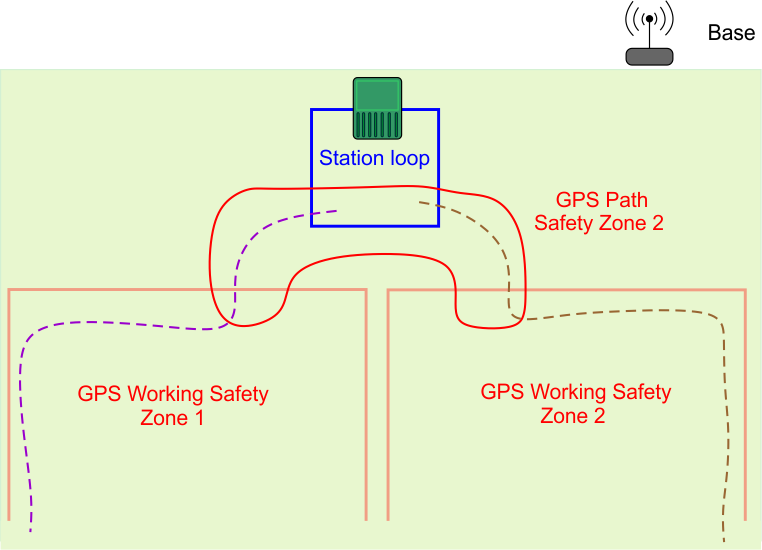
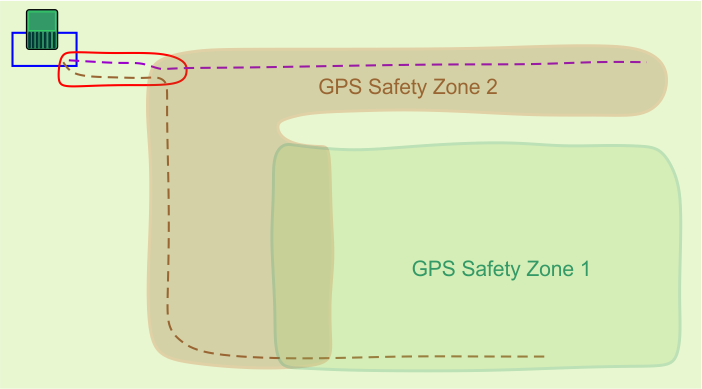
パスで結ばれた2つの安全ゾーン
- 2つのGPS安全ゾーンに加えて、GPSパス用に追加のGPS安全ゾーンが作成されます。このゾーンは、4 m x 4 mを超えるオーバーラップでループに接続されます。
- パスゾーンは両方の作業ゾーンと交差します。
- ロボットが両方の作業領域にアクセスできるようにパスが作成されます。
- パスは作業ゾーンまで十分に伸びています。これはロボットがステーションに戻るのをサポートします。
- 修正にWi-Fiを使っている場合は、リピーターを使う必要がある場合があります。
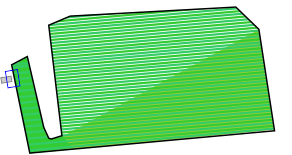
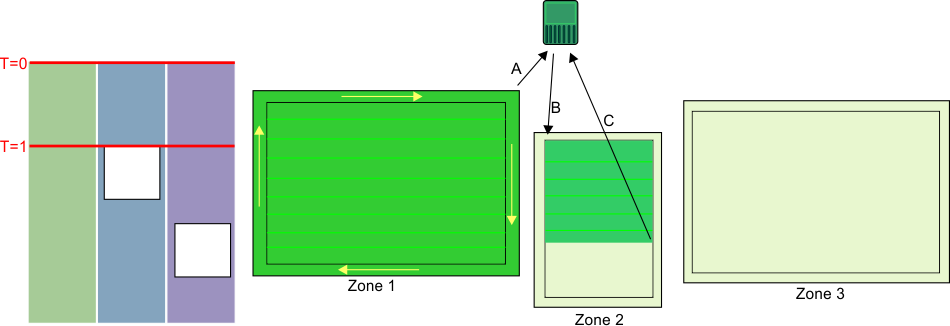
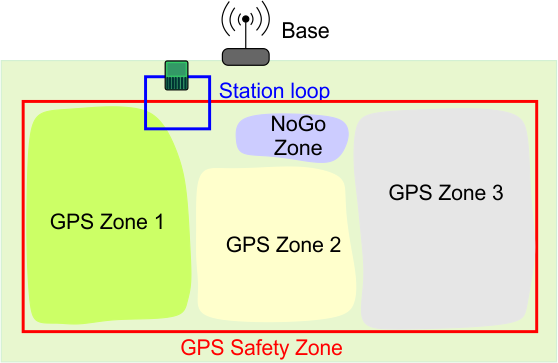
1つの安全ゾーン、3つのGPS作業ゾーン、1つの進入禁止ゾーン
- 1つのGPS安全ゾーンは作業領域全体をカバーします。
- GPS安全ゾーンは、ステーションループワイヤと少なくとも4 m x 4 mの幅で交差します。
- ロボットの作業スケジュールを最適化するために、安全ゾーン内に3つのGPS作業ゾーンが定義されています。これらはステーションループワイヤと交差する必要はありません。
- 1つの進入禁止ゾーンが定義されました。これは安全ゾーンの境界から少なくとも5メートル離れている必要があります。
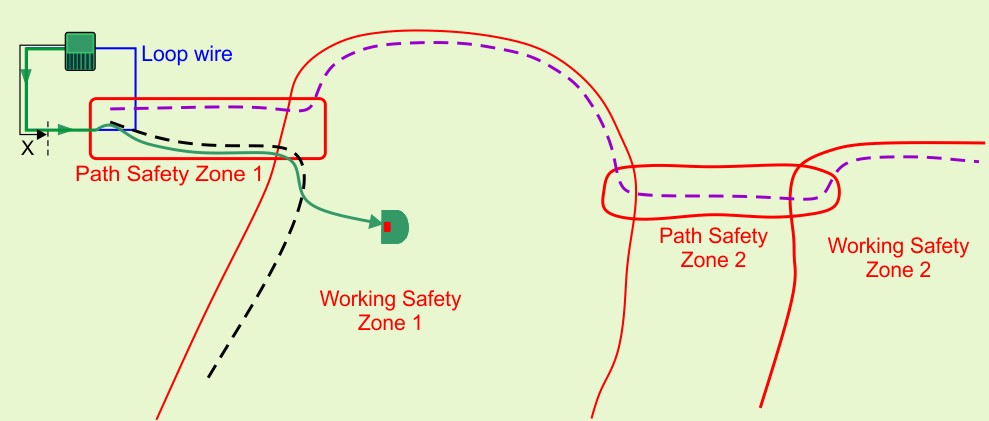
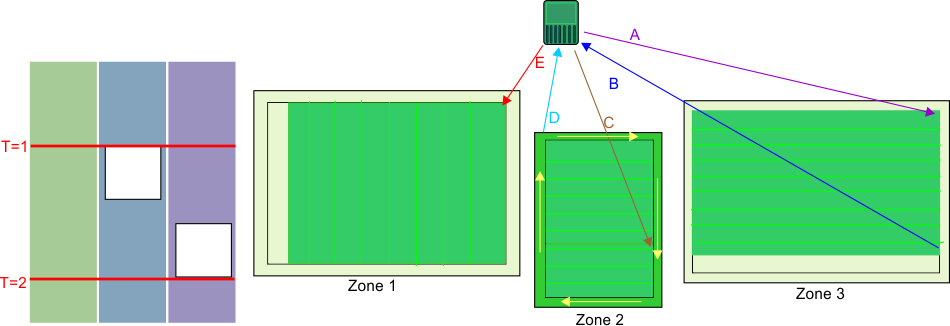
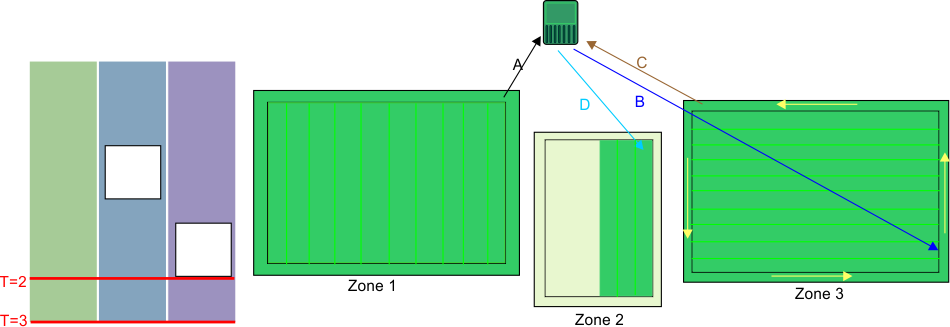
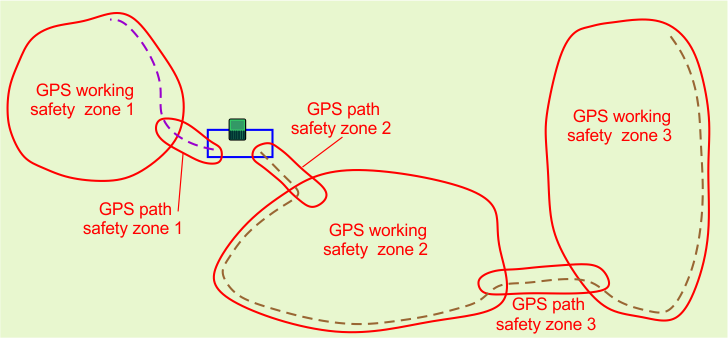
パスで繋がれた大きく離れた作業ゾーン
- 3つの離れた作業領域をパスで接続できます。
- パスは追加の安全ゾーンに含まれます。
- 1つのパスが複数のGPSゾーンを通過します。
- 経路は作業ゾーンまで延長されており、ロボットがステーションに戻る必要があるときに、どこにいてもステーションに戻ることができるようにします。
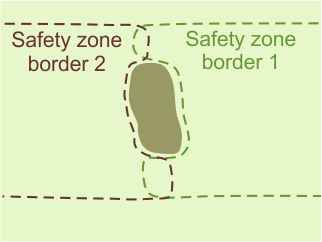
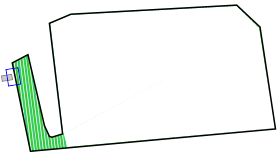
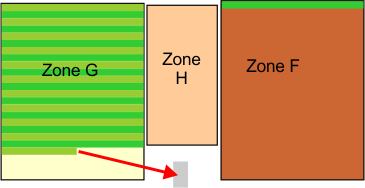
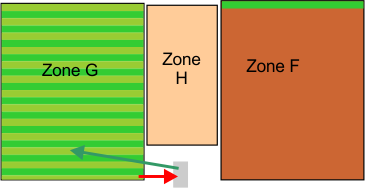
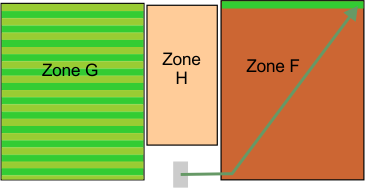
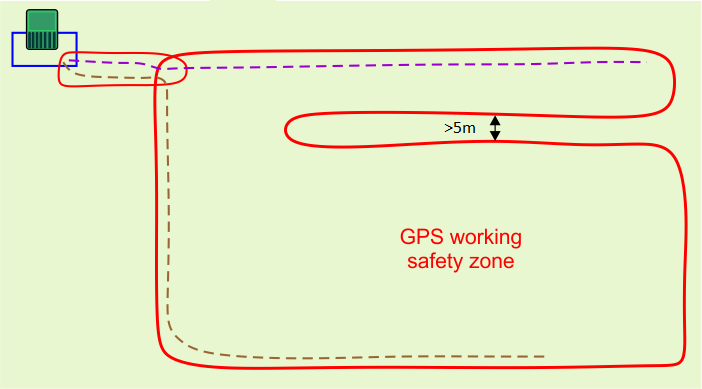
狭い通路を含む安全ゾーン
この例では、安全ゾーンには、安全ゾーン境界の隣接するセクション間の距離が5メートル未満の通路が含まれています。この配置では問題が発生する可能性があるため、代わりに次の図に示す構成を採用する必要があります。この構成では、隣接するセクションが近づきすぎないように、 2つの離れたゾーンが定義されています。
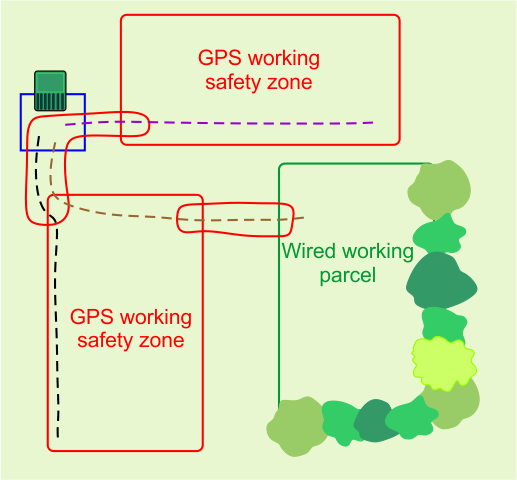
GPSと有線作業ゾーンを接続するパス
G527734
パスを使ってGPS作業ゾーンと有線区画を接続できます。GPS信号レベルが2未満の場合には、ペリフェラルワイヤが必要になる場合があります。
トラブルシューティング
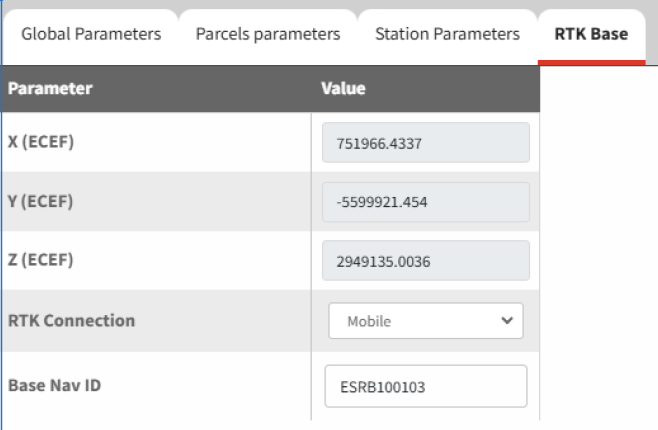
ペリフェラルワイヤーがない4G RTKの設置中は、安全ゾーン内においてのみロボットが安全に動作することが重要です。インストール時に使用され、モニターされる構成パラメータがいくつかあります。これらのいずれかが変更されると、エラーが発生し、ロボットは動作を停止します。
これらの重要なパラメータは次のとおりです:
- RTKベースステーションの測定基準位置。
- ベースステーションのID。
- 使用中のすべてのGPS安全ゾーンのGPS座標。これには、作業時間が0%の安全ゾーン (またはGPSゾーン) は含まれません。
- 使用中のすべての進入禁止ゾーンのGPS座標。
- すべてのGPS安全ゾーンの状態 (追加または削除されている場合)。
- すべてのGPS安全ゾーンの状態 (追加、削除または無効にするされている場合)。
- Wi-Fiが使われている場合は、Wi-Fiパスワード。
新しいミッションの開始後、何らかの変更があると自動的に検出され、ロボットはミッションを開始しません。問題の原因は、ロボットUIの4G RTKサマリー画面に表示できます。これは自動的に表示されますが、技術者メニュー(9)>インフラストラクチャ> 4G RTKサマリーを選択して表示することもできます。
この画面に表示されるすべてのメッセージの詳細については、テクニカルマニュアルを参照してください。
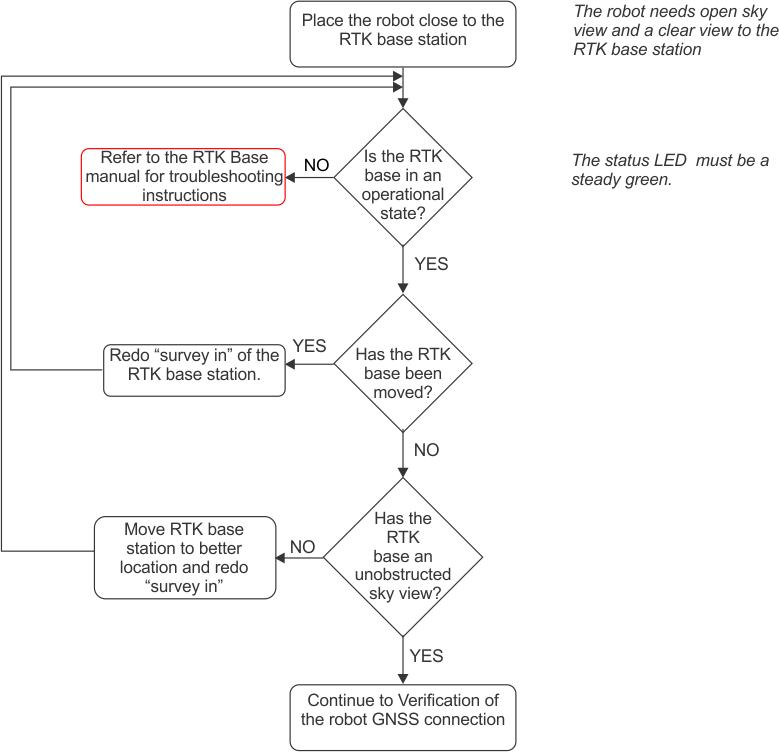
RTK GPSインストールのトラブルシューティング
この手順は、GPS信号の品質が低すぎる際に問題を特定するために使われます。信号品質レベルは技術者メニュー(9)> GPS
RTKで確認できます。この手順はいくつかの段階から構成されており、順番に実行する必要があります。
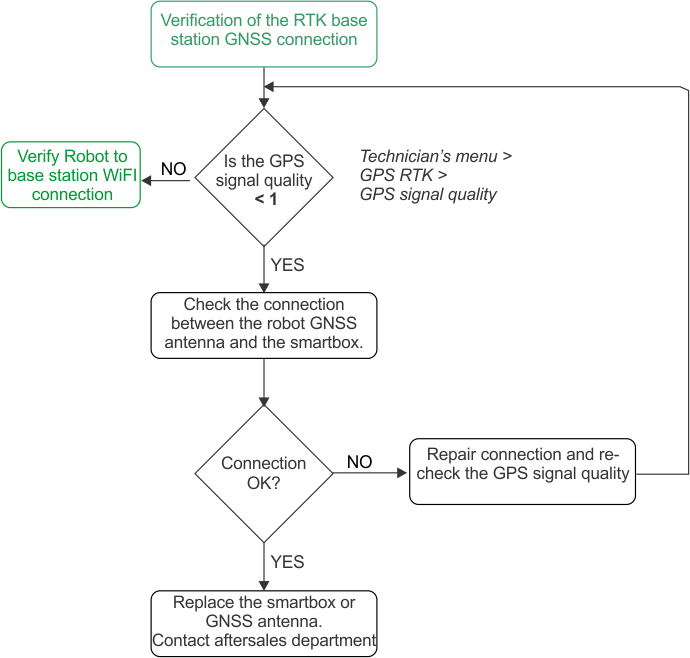
RTKベースステーションのGNSS接続を検証する
注: 各アクションの後は必ず数分間待ち、GPS信号の品質がRTK品質レベル1.2以上に向上していることを検証してください。
ロボットのGNSS接続を検証する
注: 各アクションの後は必ず数分間待ち、GPS信号の品質がRTK品質レベル1.2以上に向上していることを検証してください。
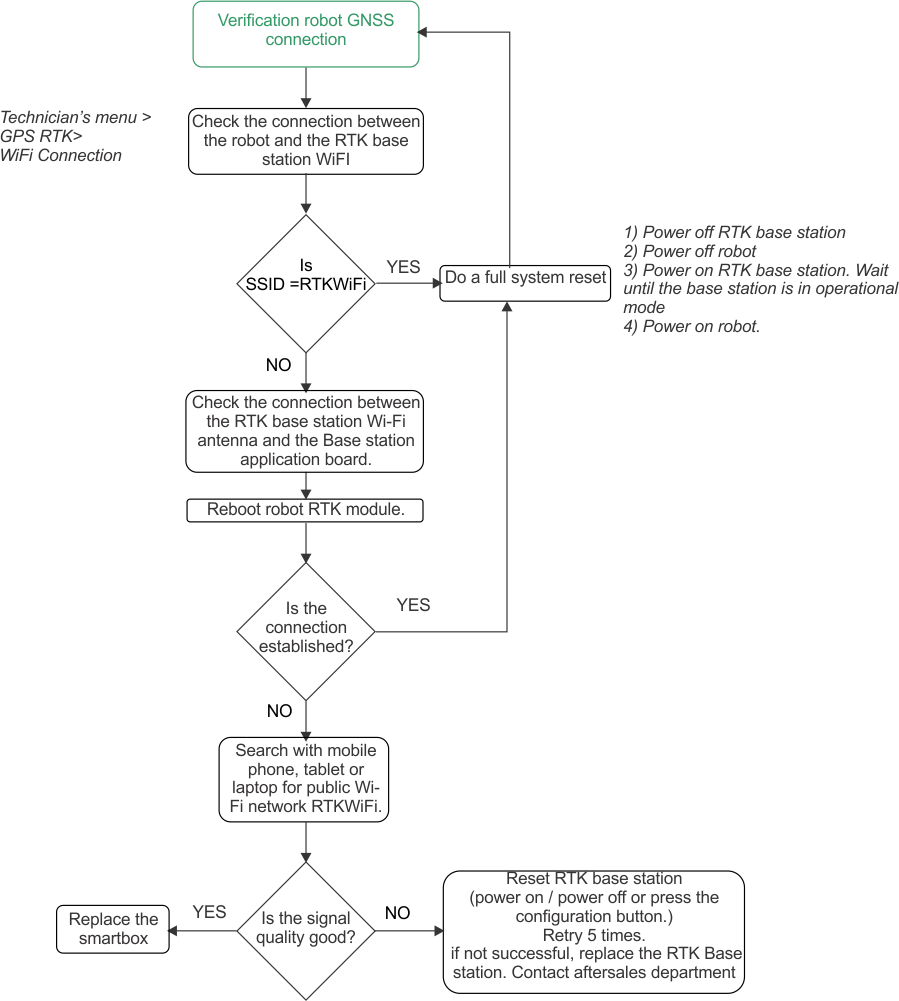
RTKベースステーションのWi-Fi 接続を検証する
注: 各アクションの後は必ず数分間待ち、GPS信号の品質がRTK品質レベル1.2以上に向上していることを検証してください。
付録
非アクティブ状態
ロボットが自律的な芝刈り作業を停止し、非アクティブ状態になる状況が発生する場合があります。これには次のような理由が考えられます:
- ロボットに問題が発生し、アラームが発せられた。
- 作業が手動で停止された。
どちらの状況でも、ロボットの電力消費を管理するためのメカニズムが存在します。
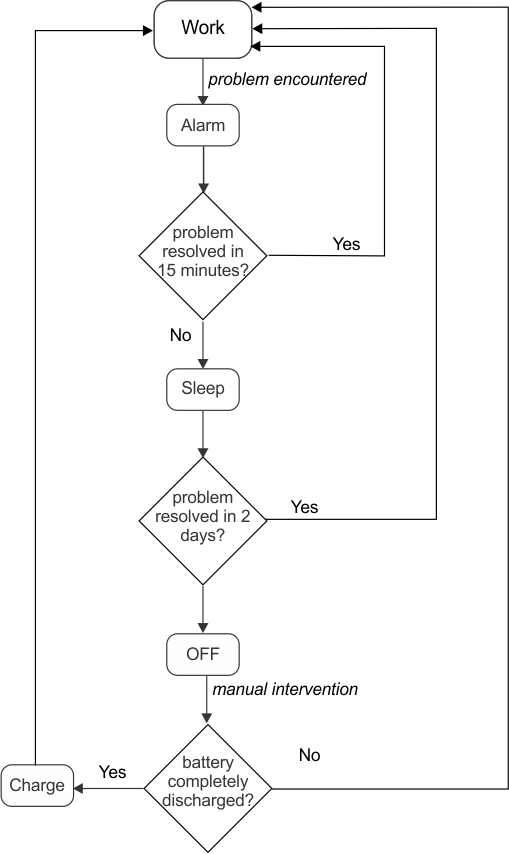
アラーム
ロボットが問題に遭遇するとアラームが登録され、最終的には人手による介入が必要になります。
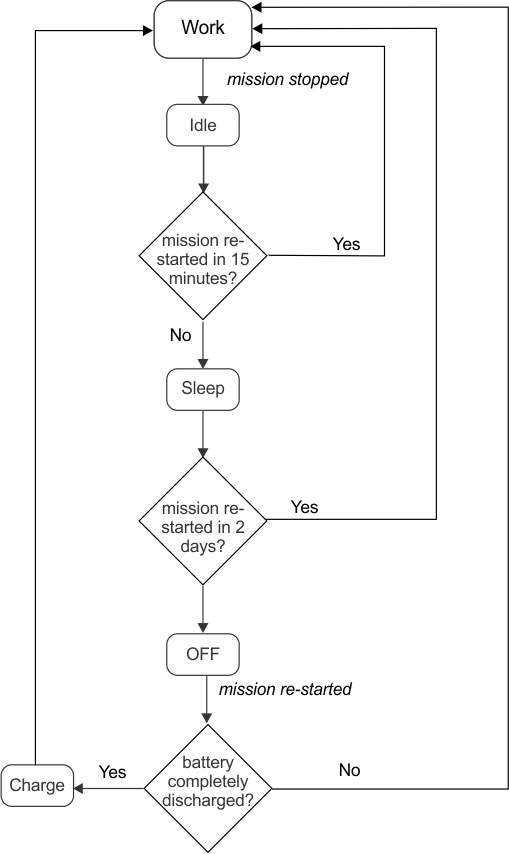
15分経過してもアラームが解除されない場合、ロボットはスリープモードに入ります。この状態では、ロボットはモデム以外のすべてをシャットダウンして電力消費を押さえます。
注: スリープモードは、ロボットの電源が1時間以上オンになっている場合にのみ有効になります。
スリープ モードは2日間、またはバッテリー残量が非常に少なくなるまで継続され、その後自動的にオフになります。
これには人手による介入が必要です。アラームをクリアして自律作業モードを再開するか、ロボットを充電ステーションまで押してバッテリーを充電します。
作業の停止
この場合、ロボットはアイドル状態に入りiます。デフォルトでは、ロボットは15分間アイドル状態が続くと、上記のスリープ モードに入り、電力消費が最小限に抑えられます。スリープ モードは2日間、またはバッテリー残量が非常に少なくなるまで継続され、その後自動的にオフになります。
作業を再開する前に、ロボットはセルフテストを実行し、システム全体(電子機器、センサー、機械部品、ソフトウェアを含む)の整合性チェックを行います。
- セルフテストの結果が成功した場合、ロボットは自律的な作業状態を再開します。
- セルフテストの結果が成功しなかった場合、ロボットはアラームを登録し、人手の介入が必要になります。