La forma más
sencilla de garantizar que cada zona y su límite se siegue de
forma habitual es implementar la programación secuencial.
Cuando se implementa la programación secuencial,
el robot trabajará en cada zona por turnos y segará el límite
cuando la siega finalice. El robot trabaja
en conjunción con la programación de trabajo definida.
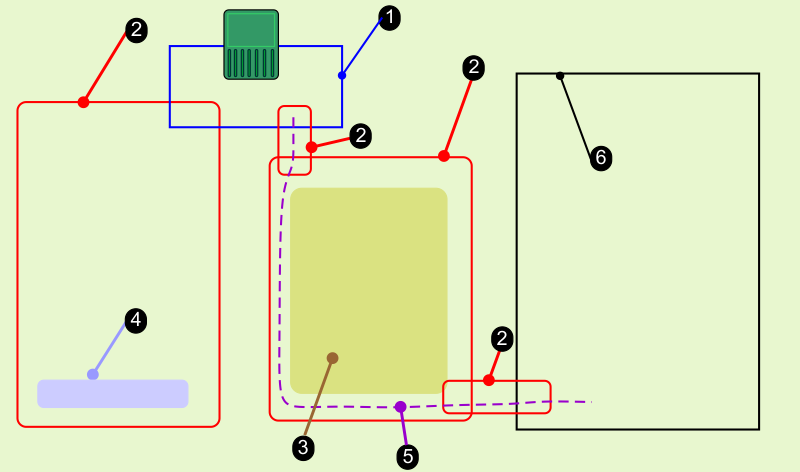
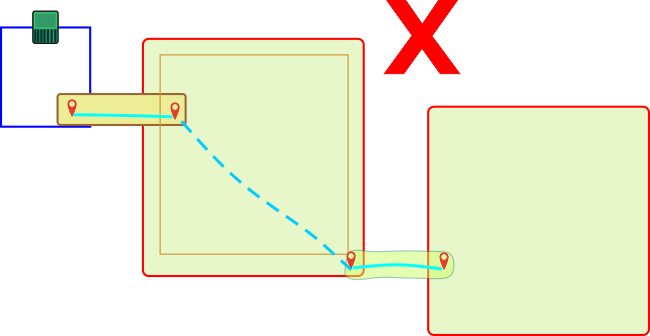
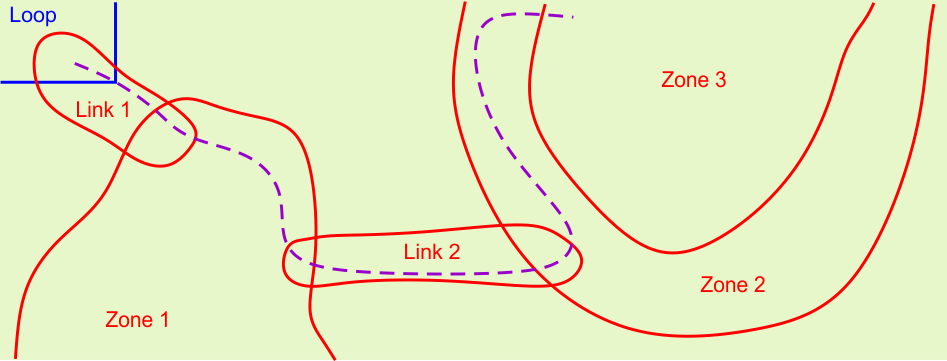
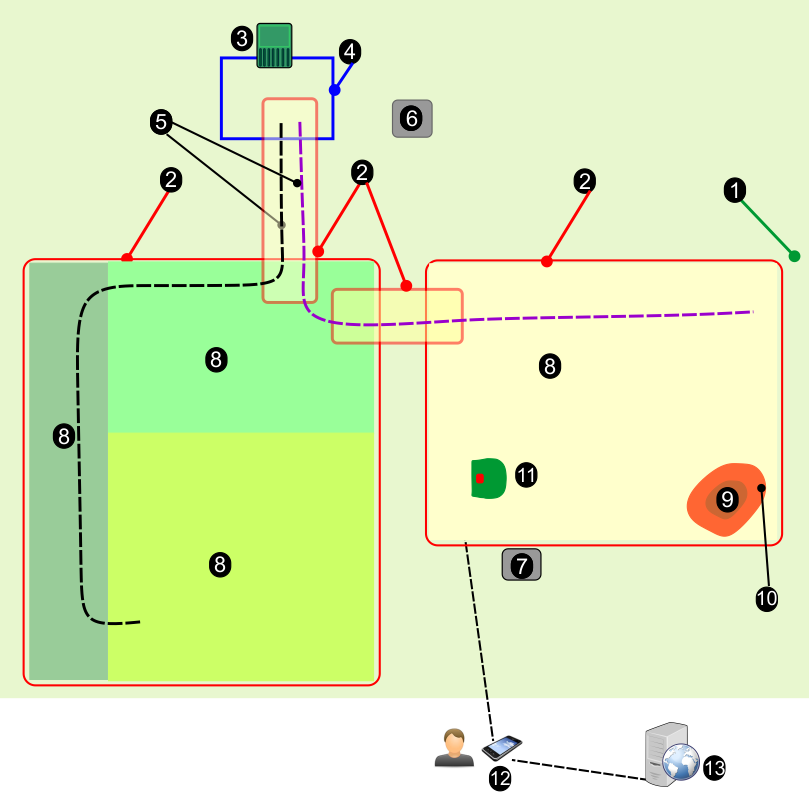
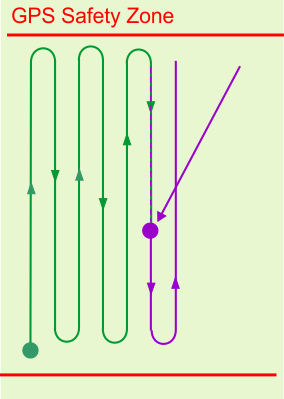
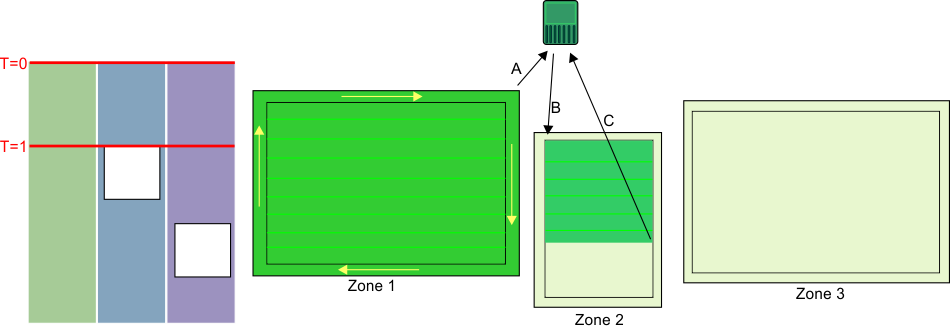
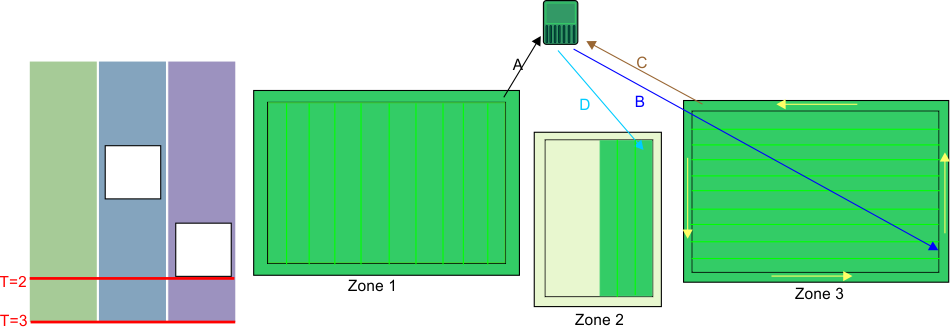
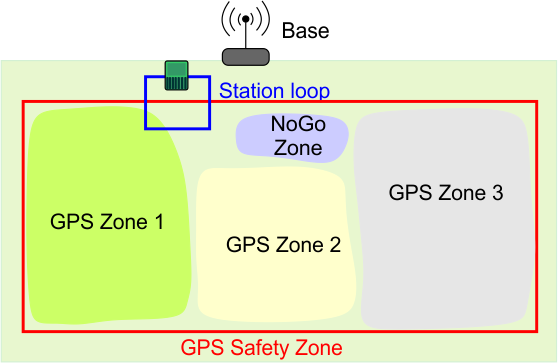
En
la siguiente figura se muestra el proceso de la programación
secuencial. Imagine una configuración de la instalación
con tres zonas separadas para segar. La programación
definida dicta que las zonas 2 y 3 no están disponibles durante
ciertas horas del día.
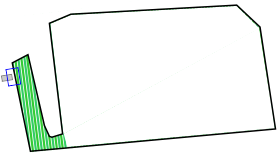
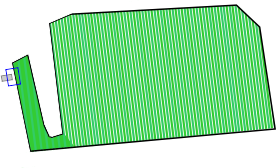
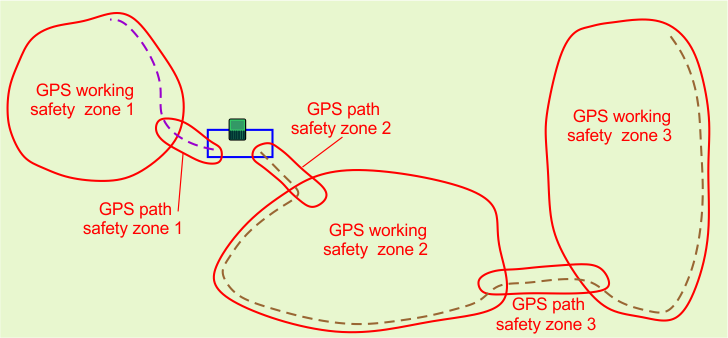
A la hora T=0, el robot comienza
a segar la zona 1. Una vez segada toda el área, siega el límite
y vuelve a la estación (A). A continuación,
se desplaza a la zona 2 (B) y siega hasta la hora T=1, que es el momento
en que la programación dicta que la zona
2 no está disponible El robot regresa a la estación (C).
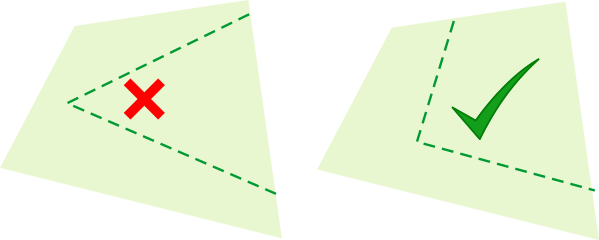
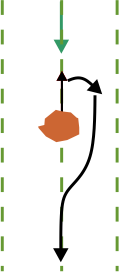
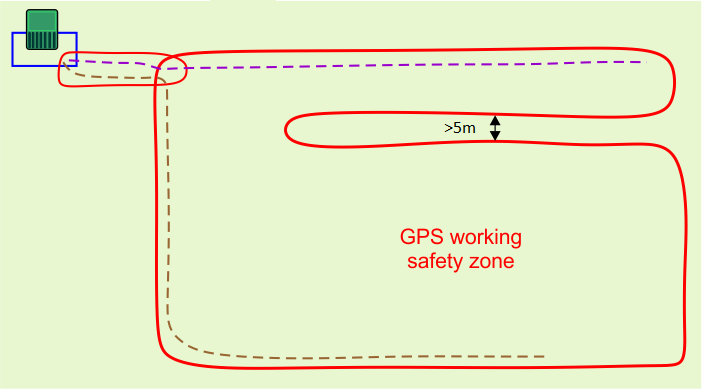
Nota: Al segar el límite, el robot sigue la misma dirección que
la utilizada al descubrir el límite.
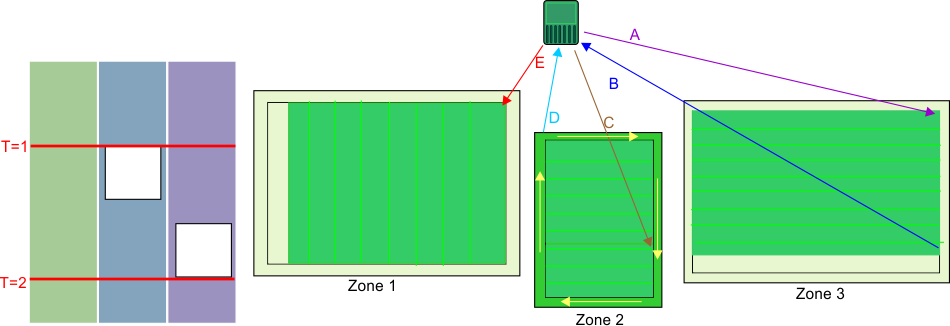
A la hora T=1, el robot se desplazará
a la zona 3 (A) y siega allí hasta que la programación dicte
que la zona 3 no está disponible. El
robot regresará a la estación (B) y luego vuelve a acabar
de segar la zona 2 (C). Cuando el área se haya segado, segará
el límite antes de volver a una estación
(D). Puesto que la zona 3 sigue sin estar disponible, se desplazará
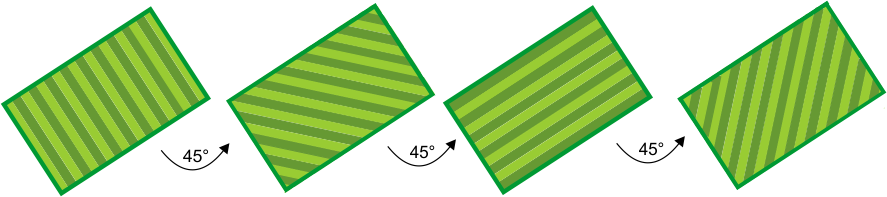
a la zona 1 y comenzará a segar en una
nueva dirección (E).
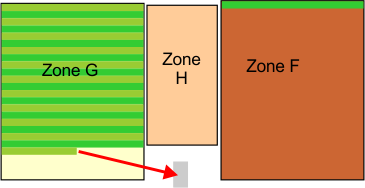
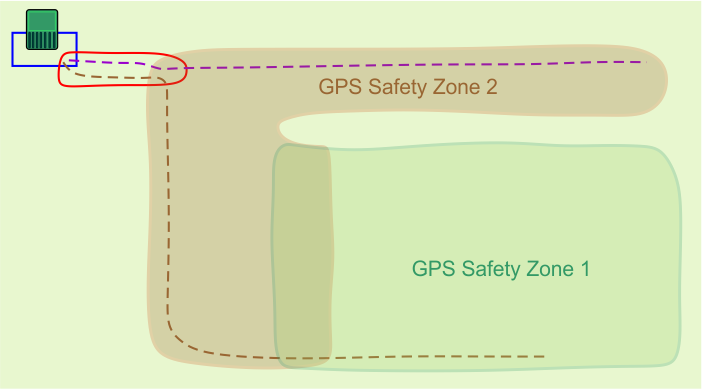
A la hora T=2, la zona 1 no está
completa y la 3 zona está disponible.
A la hora T=2, el robot acabará
de segar la zona 1 y, a continuación, segará el límite
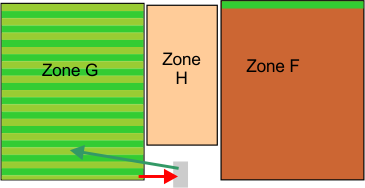
antes de volver a la estación (A). Regresará
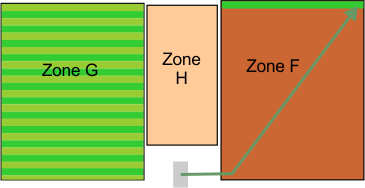
a la zona 3 (B) y acabará de segar la zona y el límite.
Volverá a la estación (C) y luego comenzará a segar
la zona 2 en una nueva dirección (D).
Nota: Se recomienda encarecidamente utilizar la programación secuencial.
De lo contrario, es necesario definir el porcentaje de
tiempo que se pasará trabajando en una zona concreta
y especificar explícitamente el número de veces por semana
que debe segarse el límite.