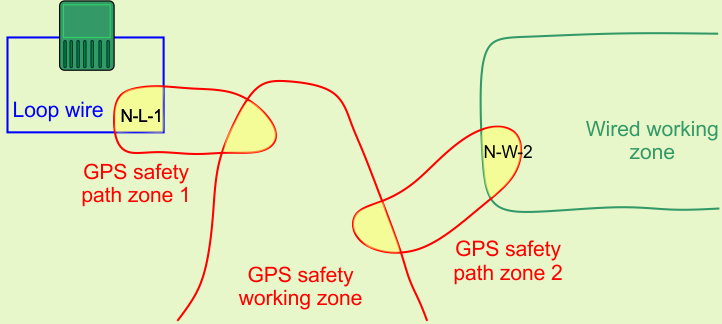
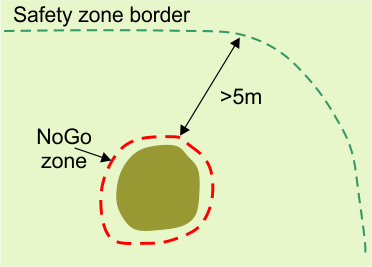
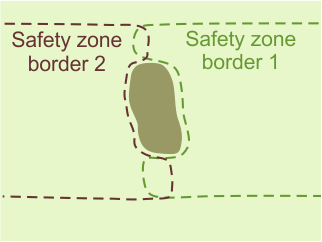
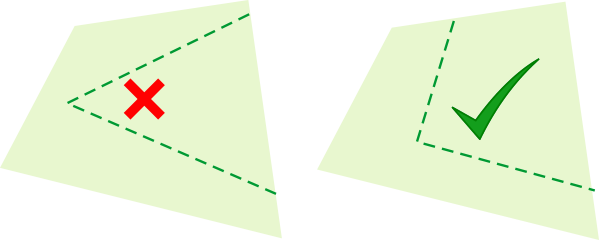
Sperrzonen sind ein Mittel,
um permanente Hindernisse zu umgehen. In Ermangelung eines Außenkabels
ist es wichtig, dass Sie die Bedingungen für
die Umgehung von Hindernissen kennen, bevor Sie sie schaffen. Permanente
Hindernisse und die Mittel, wie sie umgangen
werden können, sollten im Installationsplan festgelegt werden.
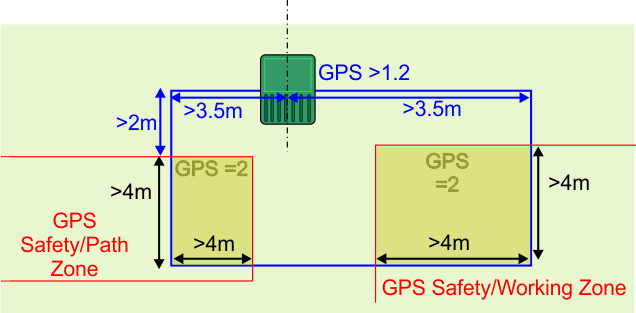
Sie
müssen auch die unten beschriebenen Abmessungen berücksichtigen,
bevor Sie die Sperrzone festlegen.
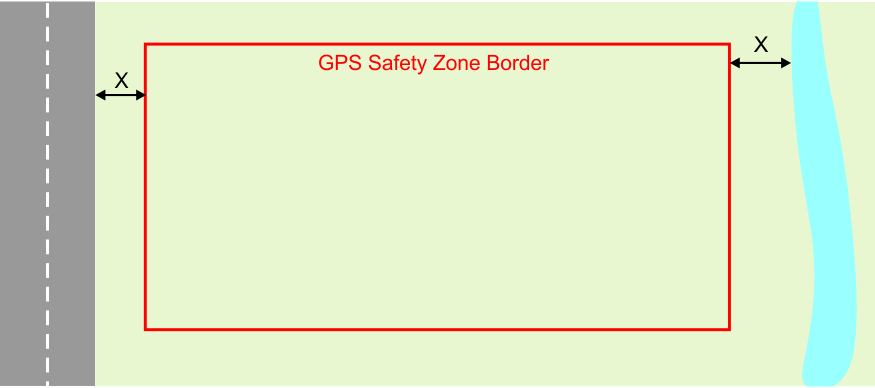
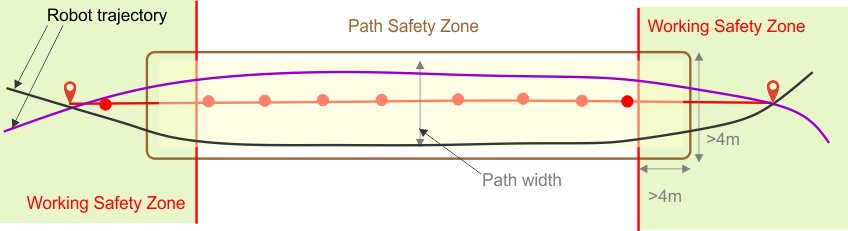
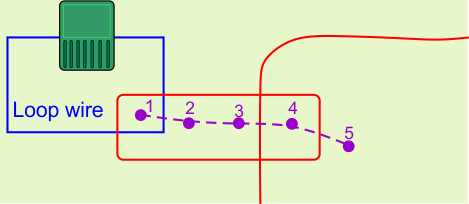
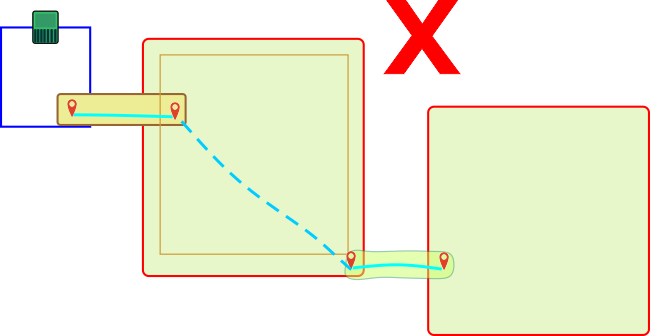
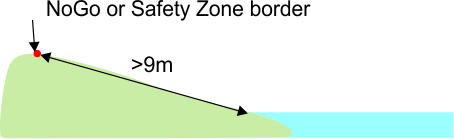
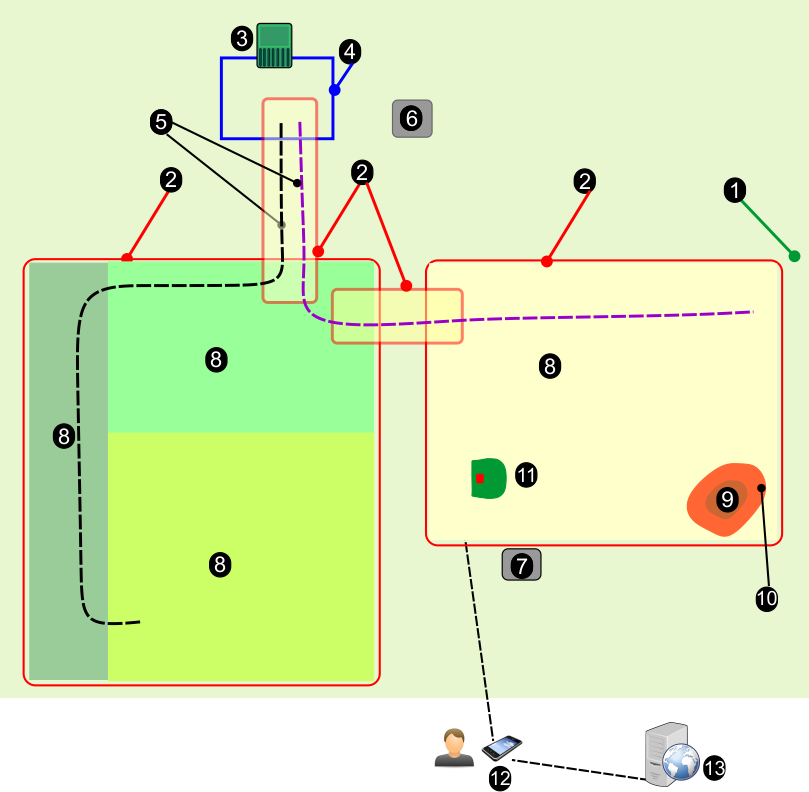
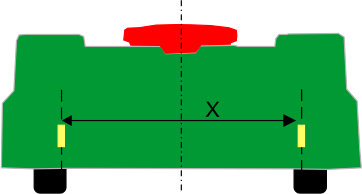
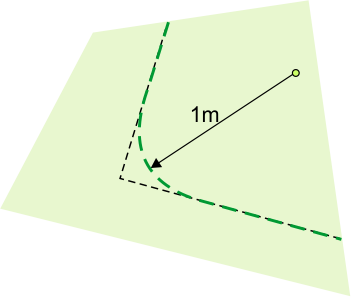
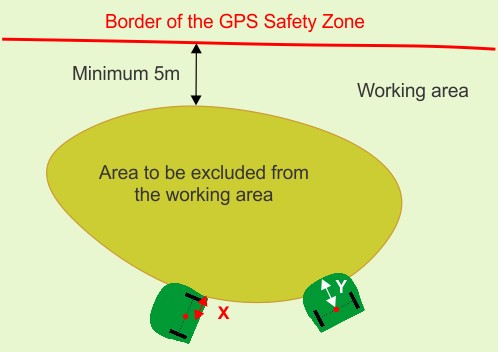
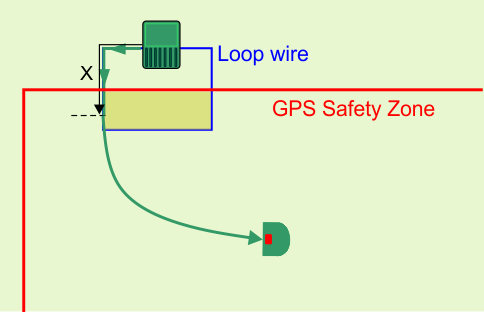
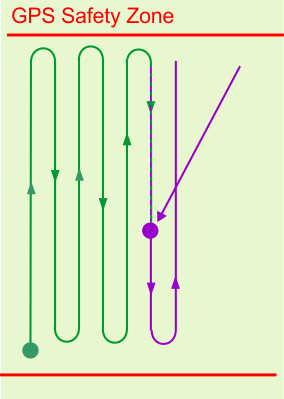
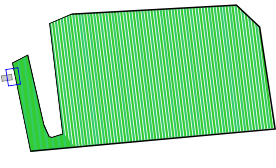
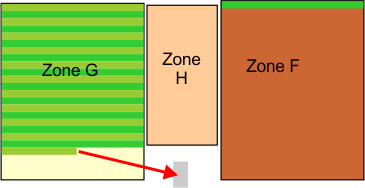
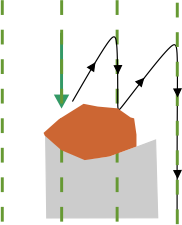
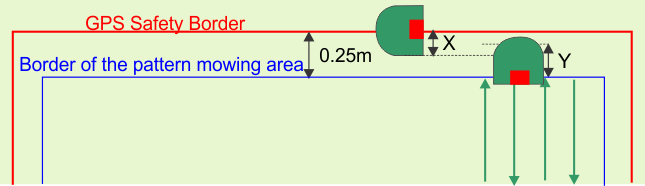
Wie aus der vorstehenden Abbildung
ersichtlich ist, ist die Position des registrierten Punkts am Rand
der Sperrzone, wenn der Roboter die Randermittlung
durchführt oder in einer Richtung parallel zum Rand arbeitet,
in einem Abstand X vom eigentlichen auszuschließenden
Bereich. X ist die halbe Breite des Roboterkörpers 639 mm.
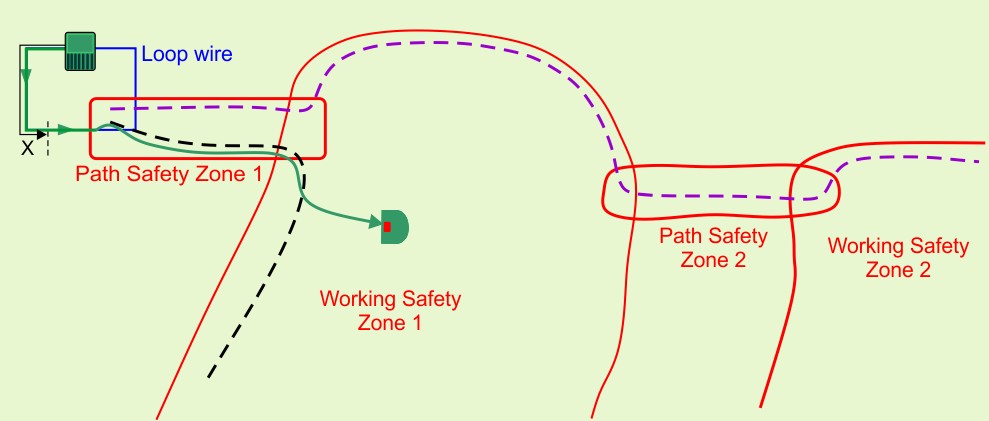
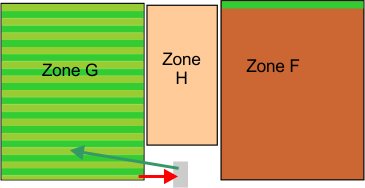
Wenn
die Musterrichtung senkrecht zum Rand des Bereichs ist, hält
der Roboter an, wenn die Mitte der Achse zwischen den Hinterrädern
die registrierte Position der Grenze der Sperrzone
erreicht. In diesem Fall ist die registrierte GPS-Position der Grenze
der Sperrzone einen Abstand Y von der Robotervorderseite
entfernt. Y ist der Abstand zwischen dem Mittelpunkt der Hinterachse
und der Vorderseite des Roboterkörpers
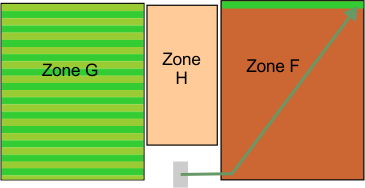
802 mm. Wenn die Musterrichtung senkrecht zur Kante des Bereichs
verläuft, wird die Nase des Roboters
weiter über den Rand der Sperrzone hineinfahren, verglichen mit
der Seite des Roboters, wenn das Muster parallel
zur Kante des Bereichs verläuft.
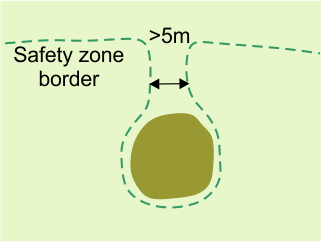
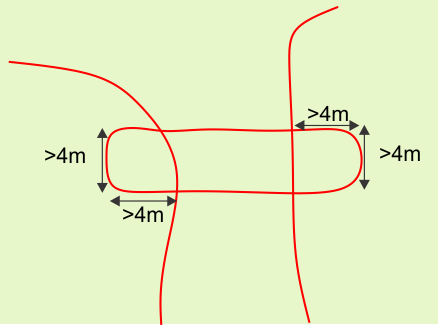
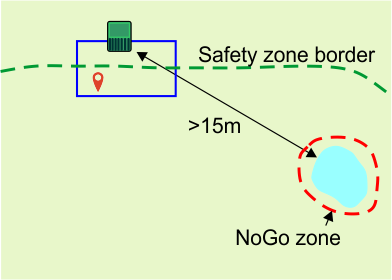
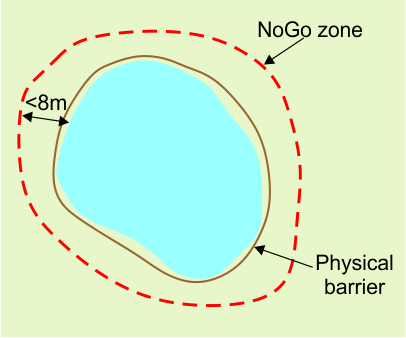
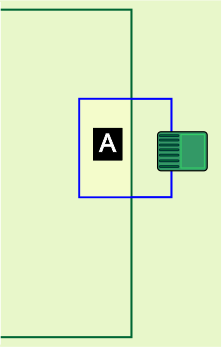
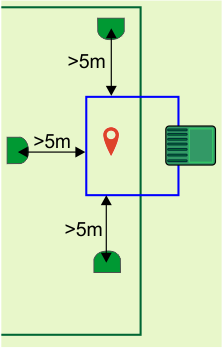
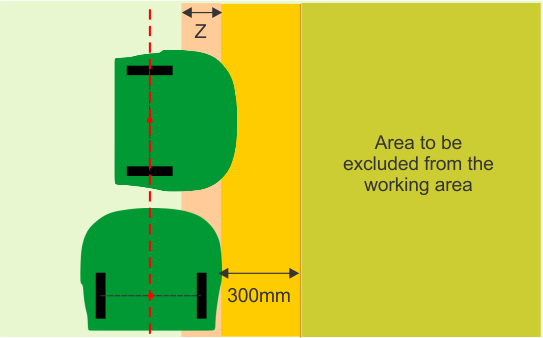
Um zu vermeiden, dass der
Roboter in den auszuschließenden Bereich eindringt oder mit einem
Hindernis kollidiert, muss bei der Registrierung
der Sperrzone ein Mindestabstand
von 300 mm zwischen dem ausgeschlossenen Bereich und der Seite des Roboters
eingehalten werden.
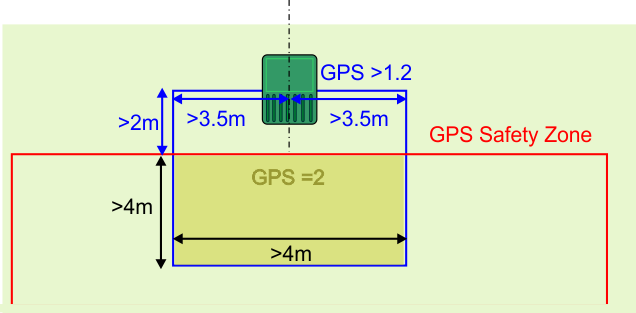
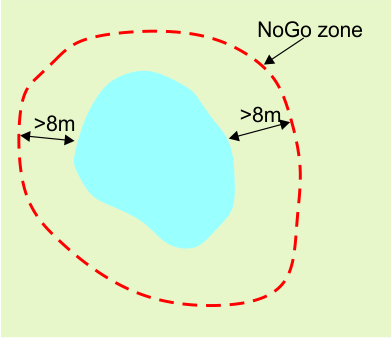
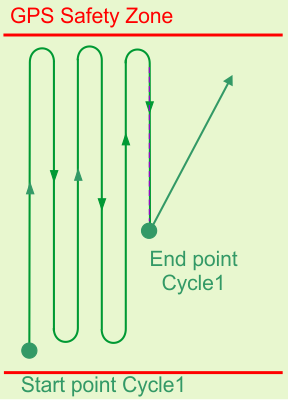
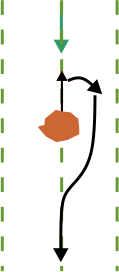
Der Roboter arbeitet bis zum Abstand
Z vom definierten Rand (der mindestens 300 mm (von der Seite
des Roboters) betragen sollte), wenn die Zone
registriert wird. Für den Roboter beträgt Z 123 mm.
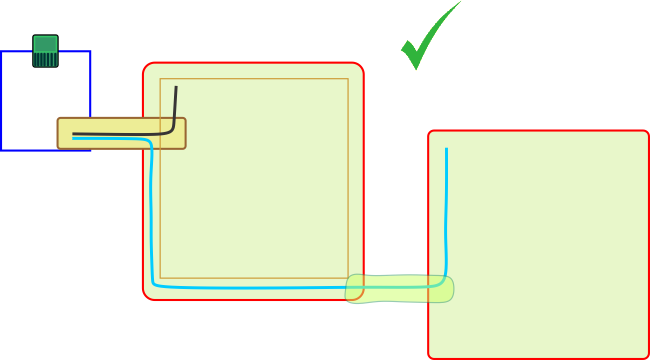
Es gibt drei Methoden, mit denen
Sie eine Sperrzone einrichten können:
- Am Roboter
- In der Smartphone-App
- Auf dem Portal