Le moyen le
plus simple de s'assurer que chaque zone et sa limite sont régulièrement
tondues consiste à mettre en œuvre une
programmation séquentielle. Lorsque la programmation
séquentielle est mise en œuvre, le robot travaille dans
chaque zone successive et tond la limite lorsque
la tonte est terminée. Le robot travaille conjointement avec
le programmes de travail défini.
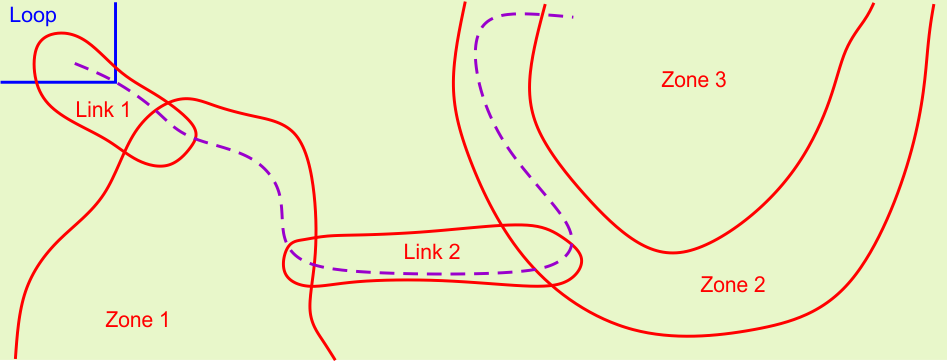
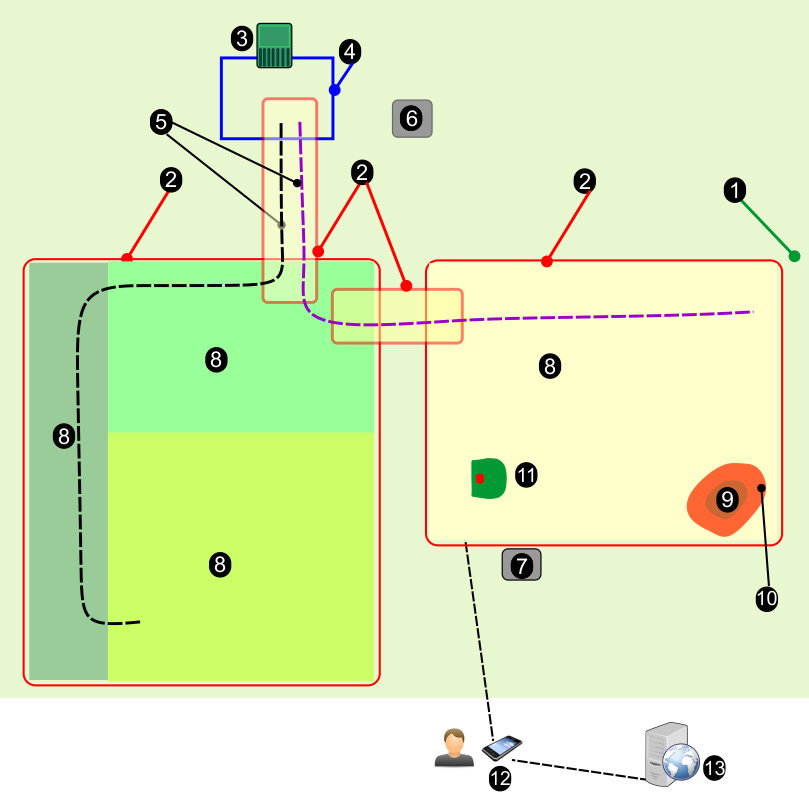
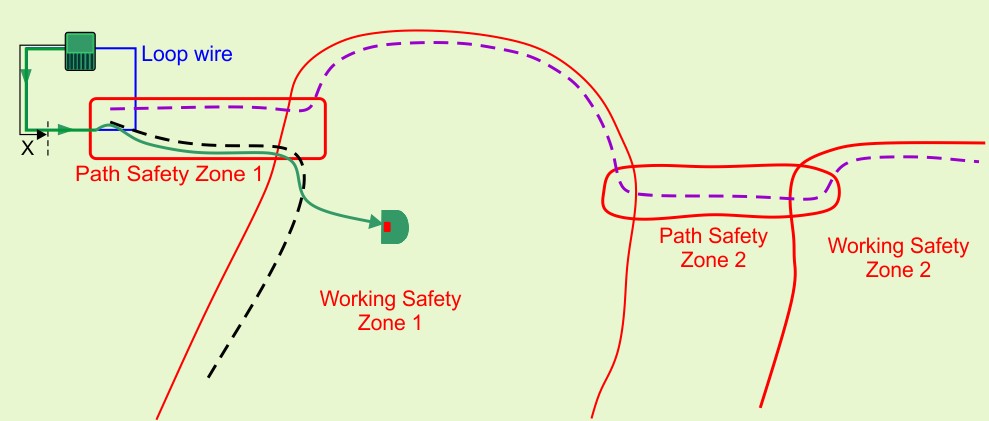
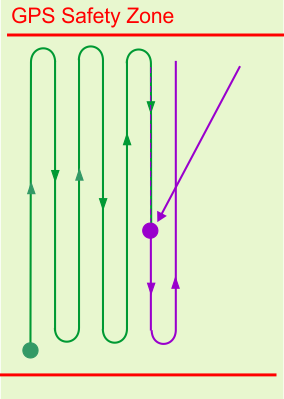
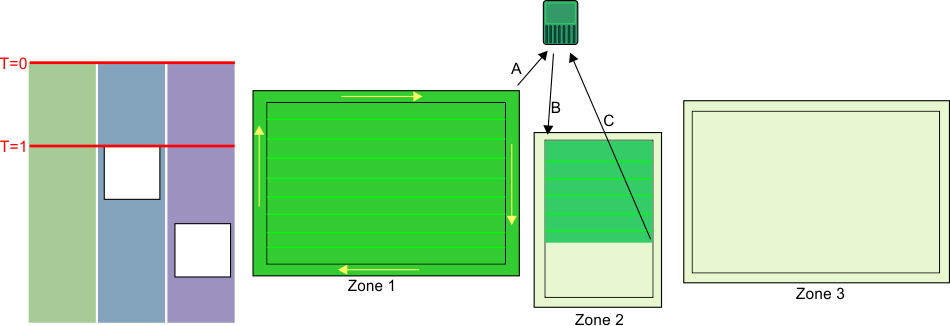
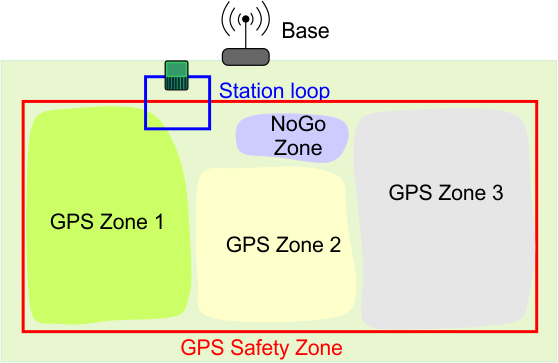
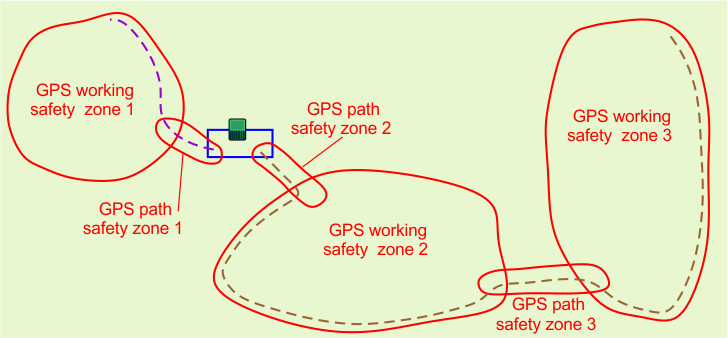
Le processus de programmation
séquentielle est montré dans la figure suivante. Prenons
comme exemple une installation avec trois
zones distinctes à tondre. Le programme défini stipule que
les zones 2 et 3 sont indisponibles à certains moments de
la journée.
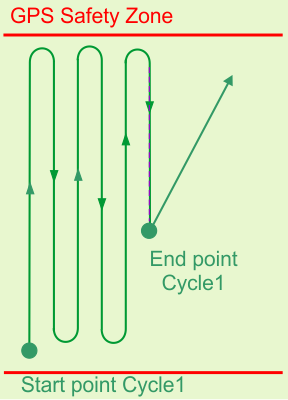
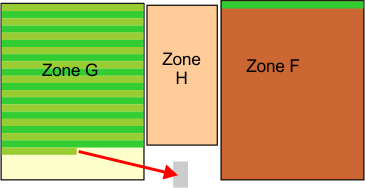
Au moment T=0, le robot commence
à tondre la zone 1. Lorsque toute la zone a été tondue,
il tond la limite, puis retourne à la
station (A). Il se rend ensuite sur la zone 2 (B) et tond jusqu'au
moment T=1, qui est le moment où le programme défini
indique que la zone 2 est indisponible. Le robot
retour à la station (C).
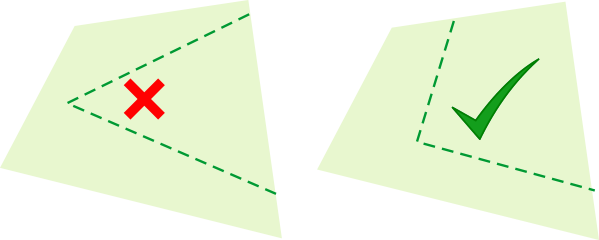
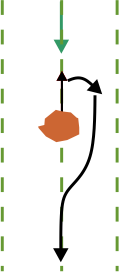
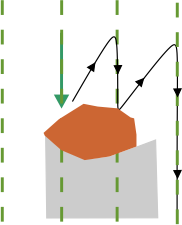
Remarque : Lorsqu'il tond la limite, le robot
suit la même direction que celle utilisée lors de la découverte
de la limite.
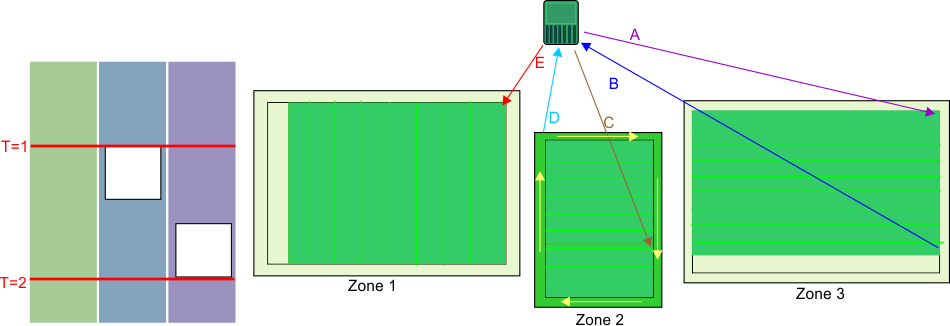
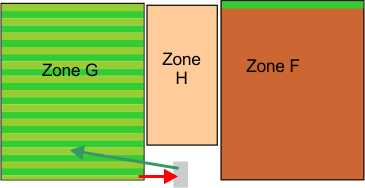
Au moment T=1, le robot se rend
à la zone 3 (A) et tond jusqu'à ce que le programme indique
que la zone 3 est indisponible. Le robot retour
à la station (B), et revient ensuite pour finir de tondre la
zone 2 (C). Une fois la zone tondue, il tond
la limite avant de retourner à une station (D). Comme la zone
3 est toujours indisponible, il se rend à la zone 1 et commence
à tondre dans une autre direction (E).
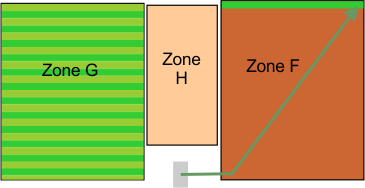
Au
moment T=2, la zone 1 n'est pas terminée lorsque la zone 3 devient
disponible.
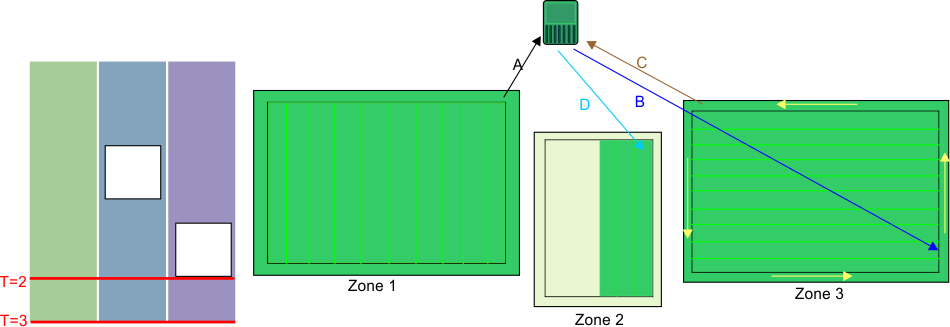
Au moment T=2, le robot termine
de tondre la zone 1, puis tond la limite avant de retourner à
la station (A). Il retourne ensuite à
la zone 3 (B) et fini de tondre la zone et la limite. Il retourne
ensuite à la station (C) et commence à tondre
la zone 2 dans une autre direction (D).
Remarque : Il est vivement recommandé
d'utiliser la programmation séquentielle. Si elle n'est pas utilisée,
il est nécessaire de définit
le pourcentage de temps à consacrer à une zone donnée
et de spécifier explicitement le nombre de fois par semaine où
la limite doit être tondue.