| 整備間隔 | 整備手順 |
|---|---|
| 使用するごとまたは毎日 |
|
はじめに
このマシンは回転刃を使用するリール式乗用芝刈り機であり、そのような業務に従事するプロのオペレータが運転操作することを前提として製造されています。この製品は、適切な管理を受けている芝生の刈り込みに使用することを主たる目的とするマシンです。このマシンは本来の目的から外れた使用をすると運転者本人や周囲の人間に危険な場合があります。
自律モードで操作するこのロボット式リールブレード芝刈り機は、業務用途での自律的な芝生管理のためにプロの監督者が使うことを目的としています。この製品は、 に詳述されているToroの要件を満たす施設で、適切な管理を受けている芝生の刈り込みに使用することを主たる目的に設計されています。自律運転サイト評価基準このマシンは本来の目的から外れた使用をすると運転者本人や周囲の人間に危険な場合があります。
この説明書を読んで製品の運転方法や整備方法を十分に理解し、他人に迷惑の掛からない、適切で安全な方法でご使用ください。この製品を適切かつ安全に使用するのはお客様の責任です。
安全上の注意事項、取扱い説明書、アクセサリについての資料、代理店の検索、製品のご登録などについては www.Toro.com へ。
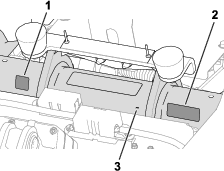
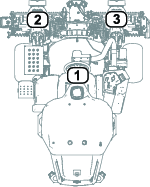
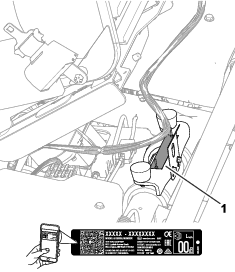
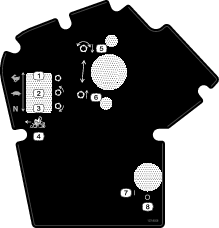
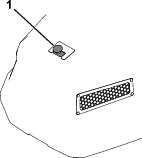
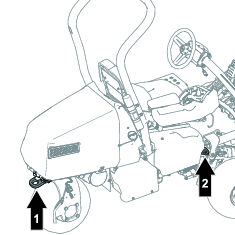
整備について、また純正部品についてなど、分からないことはお気軽に弊社正規代理店におたずねください。お問い合わせの際には、必ず製品のモデル番号とシリアル番号をお知らせください。図 1にモデル番号とシリアル番号を刻印した銘板の取り付け位置を示します。いまのうちに番号をメモしておきましょう。
Important: シリアル番号デカルについている QR コード(無い場合もあります)をモバイル機器でスキャンすると、製品保証、パーツその他の製品情報にアクセスできます。
危険警告記号
危険警告記号(図 2)は、このマニュアルと実機上とに表示され、事故防止のために守るべき重要な注意事項を示します。

危険警告記号に続いて、危険、警告、または注意という文字が表示され、危険についての具体的な内容が示されます。
危険:人の生命に関わる重大な潜在的危険を意味します。この注意を守らないと死亡事故や重大な人身事故が起こります。
警告:人の生命に関わる潜在的危険を意味します。この注意を守らないと死亡事故や重大な人身事故が起こる恐れがあります。
注意:安全に関わる潜在的危険を意味します。この注意を守らないとけがをする可能性があります。
この他に2つの言葉で注意を促しています。重要 は製品の構造などについての注意点を、注はその他の注意点を表しています。
動作モード
このマシンは、次の2つの動作モードを実行するように設計されています。
-
手動モード: マシンの機能がオペレーターによって制御されるマシン動作モード。
-
自律モード: オペレータの介入なしにマシンが定義されたタスクに沿って機能を実行するマシン動作モード。その代わり、操作は資格のある監督者によって監視される。
自律運転サイト評価基準
マシンを自律モードで操作することを許容されたサイトでは、次のガイドラインに従ってください。
用語の定義
ダイレクトパスとは、自律モードで動作しているときにマシンが障害物に遭遇することなく進むことができる経路です。
障害物は、マシンが自律モードで継続的に動作するのを妨げます。物体検出システムは、以下のいずれかの障害物を検出するとマシンを停止させるように設計されています。
-
フェンス(例:堅固な壁や金網フェンス。ロープや仮設フェンスは障害物として認知されない可能性がある)
-
擁壁
-
マシンの幅よりも大きな隙間がなく、高さ1mを超える生垣や植生が連続して並んでいるケース
-
溝
-
小川
-
池
-
建物
-
マシンが横切れないほど急な斜面
-
マシンが物理的に横切れないその他の通行不能な地形
自律作業領域 (AOA) は、自律モード時にマシンがダイレクトパスをたどることができる、管理者が定義した領域です。
非作業領域 (NOA) は、自律モード中にマシンがダイレクトパスをたどることができないように管理者が定義した領域です。
許容されるサイトは、 自律作業領域のあるサイトの安全基準のすべての基準を満たしています。
自律作業領域のあるサイトの安全基準
マシンを自律モードで動作させる前に、AOAの境界が以下の危険物から少なくとも10m離れた場所に設定されるようにしてください。
Note: さらに、マシンと以下のいずれかの危険物との間に障害物(例:固い壁や通行不能な地形)が存在する場合は、AOAの境界が障害物から少なくとも2m離れるようにしてください。
公道
公道とは、車両(自動車、四輪駆動車、自転車など)は通行できるが、歩行者は通行できない道路です。
自律動作中に公共エリアまたは小道が通行禁止になっている場合、上記で定義されたAOA境界制限は適用されません。
公共自転車道
公共自転車道は、一般の人が日常的にいつでも利用できる、軽量二輪車(自転車やスクーターなど)の使用が許可された小道です。
自律動作中に公共エリアまたは小道が通行禁止になっている場合、上記で定義されたAOA境界制限は適用されません。
公共歩行者道
公共歩行者道は、車両の通行が許可されていない一般の人々が利用する歩道です。
自律動作中に公共エリアまたは小道が通行禁止になっている場合、上記で定義されたAOA境界制限は適用されません。
深いバンカーと窪地
スプリングの長さ—19.5とは、ピットの端から1.0 m以内の深さが 1.5 m以上のバンカーまたは窪みのことです。
保守施設
保守施設には、マシンなどの機器の保守と保管のためにサイト担当者のみが使う建物および関連する屋外エリアが含まれます。一般の方や、機器の保守作業に従事していないサイト担当者は、保守施設や関連する屋外エリアに立ち入ることはできません。
私有財産
私有財産とは、所有者以外アクセスする許可がない領域のことです。
斜面
Important: 過度の斜面は、AOA内またはAOA境界から10 m未満の範囲内に含めることができますが、その周囲にはNOA境界が必要です。
斜面の最も急な部分に長さ1.25 mの木の板を置き、その板の上に傾斜計を置いて、斜面の角度を測定します。
ここで定義される過度の斜面ではマシンが自律モードで動作しないようにします。
-
水平距離が10 mを超える、傾斜が14° (勾配25%) 以上の場所でマシンを操作しないでください。
-
15°(勾配27%)を超える斜面ではマシンを操作しないでください。
ユーザー定義
資格を有するマシン管理者(監督者)
マシンの操作を監督する責任を負う1人以上の個人。監督者が実証する必要があるのは:
-
適切なマシン制御
-
エネルギー、パワートレイン、マシンの制御システムに関する一般的な理解
-
訓練を受け、マシンの操作マニュアルを読んで理解している
資格のある手動オペレーター(オペレーター)
手動モードのときに、マシンを手動で操作する責任を負う1人以上の顧客側の従業員。
製品に備わったの緊急停止
マシンに設置され取り付けられている緊急停止スイッチ (e-ストップ)。このスイッチは、マシンが自律モードの場合にのみ機能します。
モバイルデバイス
マシンが自律モードで動作しているときに、マシンに接続してマシンをプログラミング、制御、監視する監督者のモバイルデバイス (スマートフォンやタブレットなど)。モバイルデバイスは、必要に応じてコマンドでマシンのすべての機能を停止するために監督者が携帯しなければならないリモート停止装置としても機能します。
用語
アドバイス—オペレーターのエラーや、ジョブを中断または停止させ、ユーザーの介入が必要になる可能性のある事態をユーザーに通知するメッセージ。
アプリ—ソフトウェアアプリケーションの略語。複数のタスクを実行するモバイルデバイス上のコンピュータープログラム。アプリケーション、モバイルアプリ、ウエッブアプリとも呼ばれます。
自律制御システム (ACS)—マシンが人間の介入なしに長期間にわたってタスクを実行できるようにするソフトウェアとハードウェアで構成されたシステム。
自律モード— オペレータの介入なしにマシンが定義されたタスクに沿って機能を実行するマシン動作モード。手動モードと対をなす。
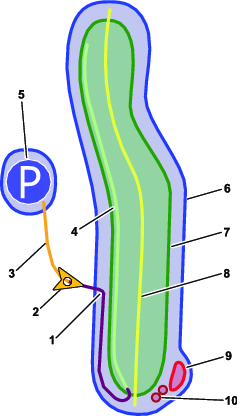
自律作業領域 (AOA)—自律作業が許可された領域。この領域内では、マシンはある場所から別の場所へ移動する際にどの軌跡を通るかを自由に決定できます。これは通常、固定障害物の数が少ない領域です。ゴルフコースでは、この領域には少なくともフェアウェイの一部またはピックアップポイントが含まれます。
基地局—外部土地測量の文脈では、近くのポータブルGNSS受信機への補正情報を導出するために使われる、その固定位置が正確に知られているGNSS 受信機です。全地球測位システム、GNSS受信機も参照してください。
境界—限界や範囲を示す、または定めるもの。ロボットの場合、作業領域、移動経路、または除外領域の外側の交差禁止線になります。外周とも呼ばれます。作業領域、移動経路、除外領域も参照してください。
中心線—フェアウェイ全体の真ん中に伸びる線。タキシードスタイルの芝刈りパターンの場合、マシンは芝刈り中にこのラインの曲率に沿って刈り取ります。
連続した草刈り領域 (CMA)—草刈り作業が行われる領域。これは、地図上ではAOA内の明るい緑色の線で表されます。これは、マシンによって刈り取られる領域を定義します。CMAには内部にホールがある場合がありますが、これは単一の閉じた領域であり、単一のAOA内に完全に含まれている必要があります。ゴルフコースでは、これは通常、フェアウェイ、またはナチュラルハザード(池など)によって複数の部分に分断されているフェアウェイの場合にはフェアウェイの一部に相当します。
プレーの方向 (D.o.P)—ゴルフ用語では、プレーの方向はティーグランドからグリーンへの方向です。自律芝刈り中に、カスタム芝刈りパターンを作成するときにプレイの方向が使われます。マシンは、プレーの方向に向いて、またはプレーの方向と反対に芝を刈ることができます。また、プレーの方向に対して斜めに芝を刈るようにプログラムすることもできます。
除外領域—オペレータによって登録された、ロボットが進入してはならない領域。非作業領域 (NOA) を参照してください。
故障—メカニカル、センサー、またはソフトウェアのエラーの結果であり、それらの故障コードに応じたサービスまたは修正が必要になります。
全地球測位衛星システム (GNSS)—衛星による位置特定に使われる地球規模の衛星群を表す一般的な用語。全地球測位システムも参照してください。
全地球測位システム (GPS)—米国の衛星群ベースのナビゲーション システムで、各衛星からのデジタル信号を使ってデータを受信機に送信します。この受信機は、衛星までのおおよその距離と、衛星の真下の地球上の位置である衛星の地理的位置 (GP) を特定できます。
GNSSアンテナ—GNSS衛星から異なる周波数で送信される無線信号を受信および拡張するために使われる装置。全地球測位衛星システム、全地球測位システムも参照してください。
GNSS受信機—GNSS衛星からの情報を受信できる装置。衛星ナビゲーション装置とも呼ばれます。全地球測位衛星システムも参照してください。
ピックアップ地点へ移動—監督者からの要求に応じて、事前に定義されたポイントにマシンが自律的に戻る動作。
ホール—CMA内でロボットが移動できるが芝刈りをしてはならない、オペレーターによって登録された領域の一種。マシンが自律作業しているときに、ある領域に進入してはならない場合は、ホール内にNOAを登録します。「非作業領域 (NOA)」を参照してください。
AOA間の移動経路—マシンがAOA間を移動する際に通る可能性のある経路。これらは地図上でオレンジ色の線で表されます。これらの定義された経路は通常、手動操作マシンがすでに使っている経路に対応しています。マシンは、AOA間を移動するときに、これらの経路に正確または非常に厳密に従います。
ライダー(レーザー画像検出測距)—センサータイプを参照してください。
位置特定—移動するロボットがグローバル参照フレームに対してどこにいるかを決定するプロセス。位置特定はロボットに最も必要な基本的機能であり、位置の情報は将来の行動を決定するために必要となります。
手動モード— マシンの機能がオペレーターによって制御されるマシン動作モード。自律モードと対をなす。
マッピング—環境内の関連する特徴の位置と形状を収集し、それらをグローバル参照フレームと一緒に正確に保存する手順。
ミッション—マシンによって実行される一連のタスク。
ナビゲーション—ロボットが自身の参照フレーム内での位置を特定し、目的地までの経路を計画する能力。
非作業領域 (NOA)—自律作業が禁止されている領域。このタイプの領域は、自然の障害物や妨害物、AOA内の領域、または自律作業中にマシンが決して進入してはならないCMA内の領域(池、砂のバンカー、穴など) を示すために使われます。
物体—マシン類と接触または衝突した場合に危害を及ぼす、または受ける可能性がある障害物または地面の状態。 物体はマシンの物体検出システムによって検出されます。「物体検出」を参照してください。
物体検出—ロボットの動きを妨げる物体や地形タイプを検出するプロセス。
障害物—この領域を回避するようにプログラムされていない場合、マシンに損傷を与えたり、マシンの動作を妨げたりする可能性がある地形の特徴またはエンティティの一種。
通行障害—マシンが通行できない地形の特徴またはエンティティの一種。通行障害の例:
-
フェンス
-
建物
-
擁壁
-
水域
-
バンカー
-
灌漑排水用の穴
-
上げられた格子
駐車モード—自律/手動モードスイッチが自律モードに切り替えられているが、ACSシステムが準備ができていないか、オフになっているマシンの動作モード。駐車モードは、オペレータまたは環境内の物体がマシンの自律操作を中断させ、問題が解決されるまでマシンを強制的に駐車させることによっても発生します。
移動経路—ユーザーがプログラムした、ロボットが移動できる自律的なルート。複数のフェアウェイがあるミッション中、芝刈り機は移動経路を使ってフェアウェイ間を自律的に移動します。トランジットパスとも呼ばれます。
外周—境界を参照してください。
ピックアップポイント—芝刈りやその他の作業の前後にオペレーターがマシンを離れたり、マシンをピックアップしたりするAOA内のポイント。地図上では青い円の中に青いPで表されます。マシン管理者の指示があれば、マシンはこの地点まで戻ることができます。
ポール—マシンがNOAとして扱う、マップ上の定義されたポイント。これらは個別にマッピングされ、ポールのセットを使って、マシンが回避する必要がある領域を細かく設定できます。これは、NOAをフルにマッピングせずに、マシンが回避する必要がある領域を除外するのに役立ちます。非作業領域 (NOA) を参照してください。
近接センサー—センサータイプを参照してください。
レーダー—センサータイプを参照してください。
リアルタイムキネマティクス(RTK)—静止した正確な位置にある基地局への衛星情報を使って、地理的位置をリアルタイムで補正します (最適な条件下では3cm未満)。RTK情報は通常、携帯電話接続を介してインターネット経由でマシンに伝達されます。
衛星航法装置—GNSS 受信機を参照してください。
センシング—ロボットへがいる環境からのフィードバックにより、ロボットは環境に反応できるようになります。センサー入力はさまざまなタイプのセンサーから得られます。
センサー—物理的刺激(熱、光、音、圧力、磁気、動きなどを含むがこれらに限定されない)に反応し、結果として生じる信号またはデータを送信して、測定、制御の操作、またはその両方を行えるようにするデバイス。たとえば、センサーはロボットの状態や周りの環境を推定できます。この情報はコントローラーに送信され、適切な動作を有効にします。ロボットが効果的に機能するには、周りの環境に関する広範な情報が必要です。
センサータイプ—センサーは人間の感覚に似た入力をシステムに提供し、環境の他の物理的特性も加味して、その情報はデジタル形式に変換されます。
-
位置センサー—これらのセンサーは物体の位置を検出します。これらは、直線移動、回転角度、または3次元空間の観点から、物体の絶対位置 (位置) または相対位置 (変位) を示すことができます。
-
近接センサー—これらのセンサーは物体に接触することなくそれを検出します。
-
超音波センサー
-
ライダー
-
レーダー
-
状態—これらは、ある時点で切り取ったマシンのプロパティとそのステータスのセットです。
監視アプリ—「アプリ」を参照してください。
タスク—ミッションの構成要素。タスクは、特定のミッションの一部としてマシンのオペレーターによって選択されたものであり、マシンによって自律的に実行される作業単位を表します。
超音波—センサータイプを参照してください。
この製品は、関連するEU規制に適合しています。詳細については、DOC シート(規格適合証明書)をご覧ください。
カリフォルニア州の森林地帯・潅木地帯・草地などでこの機械を使用する場合には、エンジンに同州公共資源法第4442章に規定される正常に機能するスパークアレスタが装着されていること、エンジンに対して森林等の火災防止措置をほどこされていることが義務づけられており、これを満たさない機械は、第4442章または4443章違犯となります。
エンジンの保守整備のため、および米国環境保護局(EPA)並びにカリフォルニア州排ガス規制に関連してエンジンマニュアルを同梱しております。エンジンマニュアルはエンジンのメーカーから入手することができます。
海抜 1,000 m 以上の高地でこの製品を使用する場合には、高地用ジェットが必要になります。さらに詳しい情報については、カワサキエンジンのマニュアル をご覧ください。
|
電磁適合性認証 |
警告連邦通信委員会は、このデバイス内の無線モジュールの変更または修正がToro社によって明示的に承認されていない場合は、ユーザーの機器の操作権限を無効にする可能性があると警告しています。 この機器はテストされ、FCC規則の付則15に従ってクラスAデジタルデバイスの制限に準拠していることが確認されています。これらの制限は、この機器が商業環境で操作される際に有害な干渉に対して保護を提供するように作られています。この機器は無線周波数エネルギーを生成、使用、および放射する可能性があるため、取扱説明書に従って設置および使わないと、無線通信に有害な干渉を引き起こす場合があります。この機器を住宅地域で使用すると有害な干渉を引き起こす可能性があり、その場合、ユーザーは自己負担でそれらを修正する必要があります。 |
|
このデバイスは、カナダ産業省のライセンス免除RSS規格に準拠しています。動作には次の2つの条件が適用されます。(1) このデバイスは有害な干渉を引き起こしてはならない、(2) このデバイスは、望ましくない動作を引き起こす可能性のある干渉を含め、受信する可能性のあるあらゆる干渉を受け入れなければならない。 |
|
Le présent appareil est conforme aux CNR d'Industrie Canada applicables aux appareils radio exempts de licence.L'exploitation est autorisée aux deux conditions suivantes : (1) l'appareil ne doit pas produire de brouillage, et (2) l'utilisateur de l'appareil doit accepter tout brouillage radioélectrique subi, même si le brouillage est susceptible d'en compromettre le fonctionnement. |
|
カナダ産業省の規制により、この無線送信機は、カナダ産業省が送信機用に承認したタイプおよび最大(またはそれ以下)ゲインのアンテナを使ってのみその動作が許されます。他のユーザーへの潜在的な無線干渉を減らすために、アンテナタイプとゲインは、等価等方放射電力 (eirp) が正常な通信に必要な電力を超えないように選択する必要があります。 |
|
この無線送信機 IC:26511-RUT956AFは、カナダ産業省によって、各アンテナ タイプごとに指定された最大許容ゲインと必要なアンテナインピーダンスを備えた、以下に示すアンテナ タイプで動作することが承認されています。このリストに含まれていないアンテナタイプは、そのタイプに指定されている最大ゲインを超えるゲインを持つため、このデバイスで使うことは固く禁じられています。 |
|
Conformément à la réglementation d'Industrie Canada, le présent émetteur radio peut fonctionner avec une antenne d'un type et d'un gain maximal (ou inférieur) approuvé pour l'émetteur par Industrie Canada.Dans le but de réduire les risques de brouillage radioélectrique à l'intention des autres utilisateurs, il faut choisir le type d'antenne et son gain de sorte que la puissance isotrope rayonnée équivalente (p.i.r.e.) ne dépasse pas l'intensité nécessaire à l'établissement d'une communication satisfaisante. |
|
Le présent émetteur radio IC: 26511-RUT956AFa été approuvé par Industrie Canada pour fonctionner avec les types d'antenne énumérés ci-dessous et ayant un gain admissible maximal et l'impédance requise pour chaque type d'antenne.Les types d'antenne non inclus dans cette liste, ou dont le gain est supérieur au gain maximal indiqué, sont strictement interdits pour l'exploitation de l'émetteur. |
|
アンテナ:Toro社、モデル145-0335、TAOGLAS、TLS.01.1F11、全方向性、ピークゲイン 5.0 (dBi) |
警告
カリフォルニア州
第65号決議による警告
カリフォルニア州では、この製品に使用されているエンジンの排気には発癌性や先天性異常などの原因となる物質が含まれているとされております。
バッテリーやバッテリー関連製品には鉛が含まれており、カリフォルニア州では発ガン性や先天性異常を引き起こす物質とされています。取り扱い後は手をよく洗ってください。
米国カリフォルニア州では、この製品を使用した場合、ガンや先天性異常などを誘発する物質に触れる可能性があるとされております。
安全について
安全に関する一般的な注意
このマシンは手足を切断したり物をはね飛ばしたりする能力があります。
-
エンジンを始動する前に必ずこのオペレーターズマニュアルをお読みになり、内容をよく理解してください。
-
このマシンを運転する時は常に十分な注意を払ってください。運転中は運転操作に集中してください;注意散漫は事故の大きな原因となります。
-
マシンの可動部の近くには絶対に手足を近づけないでください。
-
ガードなどの安全保護機器が正しく機能していない時は、運転しないでください。
-
作業場所に、無用の大人、子供、ペットなどを近づけないでください。子供に運転させないでください。
-
マシンを自律モードで操作する準備をしている場合を除き、マシンの電源を切り、キーを取り外し、全ての動きが止まるのを待ってから運転席を離れてください。調整、整備、洗浄、格納などは、マシンが十分に冷えてから行ってください。
間違った使い方や整備不良は人身事故などの原因となります。事故を防止するため、以下に示す安全上の注意や安全注意標識  のついている遵守事項は必ずお守りください
「注意」、「警告」、および「危険」 の記号は、人身の安全に関わる注意事項を示しています。これらの注意を怠ると死亡事故などの重大な人身事故が発生する恐れがあります。
のついている遵守事項は必ずお守りください
「注意」、「警告」、および「危険」 の記号は、人身の安全に関わる注意事項を示しています。これらの注意を怠ると死亡事故などの重大な人身事故が発生する恐れがあります。
一般的な安全性 – 自律モード
Note: 自律モードの安全性は、一般/手動モードの安全性に追加されるものです。
-
自律モードで動作しているマシンの監督者は、他者またはその所有物に発生した事故や危険に対して責任を負います。
-
自律モードでマシンを使う前に、これらの指示と警告をすべて読み、理解し、それに従ってください。
-
マシンを適切に使用または保守しないと、重傷または死亡につながる可能性がありますこの可能性を減らすために、すべての安全指示に従うこと。
-
子供や訓練を受けていない人には決してマシンの運転や整備をさせないこと。講習を受けて正しい運転知識を身に着け、運転操作に必要な運動能力があり、責任ある大人のみがこの機械の操作や整備を行ってください。
運転前の安全確認
安全に関する一般的な注意
-
子供やトレーニングを受けていない大人には、絶対に運転や整備をさせないでください。地域によってはマシンのオペレータに年齢制限を設けていることがありますのでご注意ください。オーナーは、オペレータ全員にトレーニングを受講させる責任があります。
-
安全な運転操作、各部の操作方法や安全標識などに十分慣れておきましょう。
-
運転席を離れる前に、マシンを停止し、キーを抜き取り、機械の動きが完全に停止したのを確認する。調整、整備、洗浄、格納などは、機体が十分に冷えてから行ってください。
-
緊急停止方法に慣れておきましょう。
-
オペレータコントロールやインタロックスイッチなどの安全装置が正しく機能しているか、またガードなどの安全保護具が外れたり壊れたりしていないか点検してください。これらが正しく機能しない時には機械を使用しないでください。
-
使用前に必ず、カッティングユニットの点検を行ってください。
-
これからマシンで作業する場所をよく確認し、マシンに巻き込まれそうなものはすべて取り除きましょう。
一般的な安全性 – 自律モード
Note: 自律モードの安全性は、一般/手動モードの安全性に追加されるものです。
-
これからマシンで作業する場所をよく点検し、マシンに巻き込まれそうな異物はすべて取り除いてください。
-
安全な運転操作、各部の操作方法や安全標識などに十分慣れておきましょう。
-
マシンを停止し、部品の動きを止める方法を理解してください。
-
すべてのガードおよびその他の安全保護装置が適切に設置され、適切に機能する状態でない場合はマシンを操作しないでください。
-
周囲の人や子供を自律作業領域に近づけないでください。決して子供にマシンを操作させたり監視させたりしないでください。このマシンが自律モードで動作している間は、訓練を受けた監督者以外はこのマシンを監視しないようにします。
-
マシンが自律モードで動作している間は、マシンの上に立ったり、座ったり、乗ったり、他の人にそうさせたりしないでください。
-
マシンを操作する前に、作業領域に新たな危険がないかを定期的に点検し、それらに対処してください。
-
マシンが転倒した場合は、可動部から離れてください。
燃料についての安全事項
-
燃料の取り扱いに際しては安全に特にご注意ください。燃料は引火性が高く、気化すると爆発する可能性があります。
-
燃料取り扱い前に、引火の原因になり得るタバコ、パイプなど、すべての火気を始末してください。
-
燃料の保管は必ず認可された容器で行ってください。
-
エンジン回転中などエンジンが高温の時には、燃料タンクのふたを開けたり給油したりしないでください。
-
締め切った場所では燃料の補給や抜き取りをしないでください。
-
ガス湯沸かし器のパイロット火やストーブなど裸火や火花を発するものがある近くでは、マシンや燃料容器を保管・格納しないでください。
-
燃料がこぼれたら、エンジンを始動せずにマシンを別の場所に動かし、気化した燃料ガスが十分に拡散するまで引火の原因となるものを近づけないでください。
運転中の安全確認
安全に関する一般的な注意
-
オーナーやオペレータは自分自身や他の安全に責任があり、オペレータやユーザーの注意によって物損事故や人身事故を防止することができます。
-
作業にふさわしい服装をし、安全めがね、長ズボン、頑丈で滑りにくい安全な靴、および聴覚保護具を着用してください。長い髪は束ねてください。ゆるい装飾品やだぶついた服は身に着けないでください。
-
疲れている時、病気の時、アルコールや薬物を摂取した時は運転しないでください。
-
このマシンを運転する時は常に十分な注意を払ってください。運転中は運転操作に集中してください;注意散漫は事故の大きな原因となります。
-
エンジンを掛ける前に、全部の駆動装置がニュートラルであること、駐車ブレーキが掛かっていることを確認し、運転席に着席してください。
-
散布車には人を乗せないでください。
-
作業場所に、無用の大人、子供、ペットなどを近づけないでください。
-
運転は、穴や障害物を確認できる十分な照明のもとで行ってください。
-
ぬれた芝の刈り込みは避けてください。接地力が落ちてスリップする危険が高くなります。
-
カッティングユニットに手足を近づけないでください。
-
バックするときには、足元と後方の安全に十分な注意を払ってください。
-
見通しの悪い曲がり角や、茂み、立ち木などの障害物の近くでは安全に十分注意してください。
-
刈り込み中以外は必ずカッティングユニットを止めておいてください。
-
旋回するときや道路や歩道を横切るときなどは、減速し周囲に十分な注意を払ってください。常に道を譲る心掛けを。
-
エンジンは換気の十分確保された場所で運転してください。排気ガスには致死性ガスである一酸化炭素が含まれています。
-
エンジンの掛かっているマシンからは離れないでください。
-
マシンを自律モードで動作させる準備をしていない限り、操作位置を離れる前に次の操作を行ってください。
-
平らな場所に駐車する。
-
カッティングユニットを床面まで下降させユニットの動作が停止したことを確認する。
-
駐車ブレーキを掛ける。
-
エンジンを止め、キーを抜き取る。
-
全ての動きが停止するのを待つ。
-
-
マシンの運転は十分な視界の確保ができる適切な天候条件のもとで行ってください。落雷の危険がある時には運転しないでください。
横転保護バー(ROPS)についての安全確認
-
POPS 構成物は一切マシンから外さないでください。
-
必ずシートベルトを着用し、緊急時にはシートベルトを迅速に外せるよう練習しておいてください。
-
運転時には必ずシートベルトを着用してください。
-
頭上の障害物に注意し、これらに衝突しないように注意してください。
-
ROPS自体に損傷がないか、また、取り付け金具がゆるんでいないか、定期的に十分に点検を行い、万一の際に確実に役立つようにしておいてください。
-
ROPS が破損した場合はすべて新しいものに交換してください。修理したり改造しての使用はしないでください。
斜面での安全確保
-
斜面はスリップや転倒などを起こしやすく、これらは重大な人身事故につながります。斜面での安全運転はオペレータの責任です。どんな斜面であっても、通常以上に十分な注意が必要です。
-
斜面については、実地の測定を含めてオペレータ自身が調査を行い、安全に作業ができるかどうかを判断してください。この調査においては、常識を十分に働かせてください。
-
以下に挙げる、斜面で運転する場合の安全上の注意を必ず読んで内容をしっかり理解してください。実際に運転する前に、現場の状態をよく観察し、その日その場所でこのマシンで安全に作業ができるかどうかを判断してください。同じ斜面上であっても、地表面の条件が変われば運転条件が変わります。
-
斜面での発進・停止・旋回は避けてください。急に方向を変えたり急な加速やブレーキ操作をしないでください。旋回は速度を落としてゆっくりと行ってください。
-
走行、ステアリング、安定性などに疑問がある場合には運転しないでください。
-
隠れた穴、わだち、盛り上がり、石などの見えない障害は、取り除く、目印を付けるなどして警戒してください。深い芝生に隠れて障害物が見えないことがあります。不整地ではマシンが転倒する可能性があります。
-
ぬれ芝、急斜面など滑りやすい場所で運転すると滑って制御できなくなる危険があります。駆動力を失うと、スリップを起こしたりブレーキや舵取りができなくなる恐れがあります。
-
段差、溝、盛り土、水などの近では安全に十二分の注意を払ってください。万一車輪が段差や溝に落ちたり、地面が崩れたりすると、マシンが瞬時に転倒し、非常に危険です。必ず安全距離を確保してください。
-
斜面に入る前に、安全の判断をしてください。乗用の刈り込みマシンで斜面を刈り込むことに危険が感じられる場合は歩行型のマシンをお使いください。
-
斜面では可能なかぎりカッティングユニットを地表面まで下げておいてください。斜面上でカッティングユニットを上昇させると機体が不安定になる恐れがあります。
-
集草装置などのアタッチメントを取り付けての作業には十分な注意を払ってください。アタッチメントによってマシンの安定性が変わり、安全限界が変わる場合がありますからご注意ください。
運転終了後の安全確認
安全に関する一般的な注意
-
マシンを自律モードで操作する準備をしている場合を除き、駐車ブレーキをかけ、エンジンを停止し、キーを取り外し、全ての動きが止まるのを待ってから運転席を離れてください。調整、整備、洗浄、格納などは、機体が十分に冷えてから行ってください。
-
火災防止のため、カッティングユニットや駆動部の周囲に、草や木の葉、ホコリなどが溜まらないようご注意ください。オイルや燃料がこぼれた場合はふき取ってください。
-
格納保管中やトレーラで輸送中は、燃料バルブを閉じておいてください。
-
移動走行時など、刈り込みなどの作業をしていない時には、アタッチメントの駆動を解除しておいてください。
-
閉めきった場所に本機を格納する場合は、機械が十分冷えていることを確認する。
-
必要に応じてシートベルトの清掃と整備を行ってください。
-
ガス湯沸かし器のパイロット火やストーブなど裸火や火花を発するものがある近くでは、マシンや燃料容器を保管・格納しないでください。
牽引時の安全事項
-
この機械の牽引は、必ず牽引装置(ヒッチ)を装備した車両で行ってください。牽引される側の機械は、ヒッチポイントでのみ連結してください。
-
メーカーが決めた牽引時の重量制限や斜面での牽引制限を守ってください。斜面などでは、牽引される側の機械の重量によって運転制御ができなくなる危険があります。
-
牽引される側の機械には絶対に子供などを乗せないでください。
-
牽引は低速で行い、停止距離を十分にとってください。
保守作業時の安全確保
-
運転席を離れる前に:
-
平らな場所に駐車する。
-
カッティングユニットを停止させる。
-
駐車ブレーキを掛ける。
-
エンジンを止め、キーを抜き取る。
-
全ての動きが停止するのを待つ。
-
-
保守作業は、各部が十分冷えてから行ってください。
-
可能な限り、エンジンを回転させながらの整備はしないでください。可動部に近づかない。
-
機体の下で作業する場合には、必ずジャッキスタンドで機体を確実に支える。
-
機器類を取り外すとき、スプリングなどの力が掛かっている場合があります。
-
マシン各部が良好な状態にあり、ボルトナット類が十分にしまっているか常に点検してください。
-
読めなくなったデカルは貼り替えてください。
-
マシンの性能を完全に引き出し、かつ安全にお使いいただくために、交換部品は純正品をお使いください。他社の部品を御使用になると危険な場合があり、製品保証を受けられなくなる場合がありますのでおやめください。
メンテナンス時の安全性 – 自律モード
Note: 自律モードの安全性は、一般/手動モードの安全性に追加されるものです。
-
マシンまたはソフトウェアをいかなる形でも変更しないでください。
-
マシンの上に何も置かないでください。
-
マシンの制御装置や安全装置を改造したり、書き換えたりしないこと。
-
マシンを適切に保守または使しないと、重傷または死亡につながる可能性があります
-
すべてのメンテナンス手順は認定された技術者によって実行する必要があります。
-
マシンの性能を完全に引き出し、かつ安全にお使いいただくために、純正のToro交換用自律運転用部品のみを使ってください。他社製の交換用自律運転用部品は危険な場合があります。
エンジンの安全事項
-
エンジンオイルの点検や補充は、エンジンを止めて行ってください。
-
エンジンのガバナの設定を変えたり、エンジンの回転数を上げすぎたりしないでください。
電気系統に関する安全確保
-
修理作業にかかる前に主電源コネクタを外す。
-
バッテリーの充電は、火花や火気のない換気の良い場所で行ってください。バッテリーと充電器の接続や切り離しを行うときは、充電器をコンセントから抜いておいてください。また、安全な服装を心がけ、工具は確実に絶縁されたものを使ってください。
格納保管時の安全確保
-
マシンを停止させ、キーを抜き取り、各部の動作が完全に停止したのを確認してから運転位置を離れる。調整、整備、洗浄、格納などは、マシンが十分に冷えてから行ってください。
-
ガス湯沸かし器のパイロット火やストーブなど裸火や火花を発するものがある近くでは、マシンや燃料容器を保管・格納しないでください。
安全ラベルと指示ラベル
|
危険な部分の近くには、見やすい位置に安全ラベルや指示ラベルを貼付しています。破損したりはがれたりした場合は新しいラベルを貼付してください。 |












デカール145-0345に記載されているモードの説明については、用語の定義を参照してください。

組み立て
カッティングユニットを取り付ける
この作業に必要なパーツ
| カッティングユニット(別売;弊社代理店にご相談ください) | 3 |
| 電動用カウンタウェイト | 3 |
| キャップスクリュ | 6 |
| O リング | 3 |
-
カッティングユニットの準備を行う;カッティングユニットの オペレーターズマニュアルを参照。
-
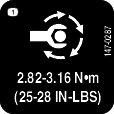
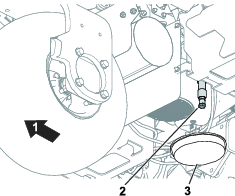
駆動カップラのスプライン溝にグリスを塗る。
-
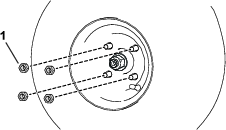
各リールモータに、図 3のようにOリングを取り付ける。
-
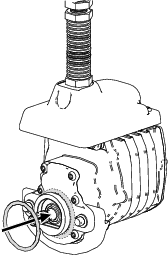
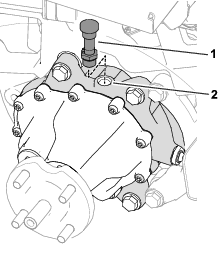
図 4 のように、キャップスクリュ2本を使用して既存のカウンタウェイトに電動用ウェイトを取り付ける。
-
カッティングユニットを取り付ける;カッティングユニットを取り付けるを参照。
マシンの設定の微調整を行う
-
主電源コネクタを接続する;主電源コネクタを参照。
-
インフォセンターを使って設定の微調整を行う;インフォセンターでマシンの設定を調整するを参照。
CE/UKCA 用デカルを貼り付ける
必要に応じて(CE/UKCA 規制に適合させる必要のある国や地域)
この作業に必要なパーツ
| 製造年デカル | 1 |
| CE 警告デカル(P/N 139-8321) | 1 |
| CE/UKCA 警告デカル(P/N 138-9470) | 1 |
CE/UKCA 規制が適用されている国や地域でこの機械を使用する場合には、以下のデカルを貼り付けてください:
タイヤ空気圧を下げる
タイヤは空気圧を高くして出荷しています。運転前に正しいレベルに下げてください;タイヤ空気圧を点検するを参照。
マシンをmyTurf
-
マシンのすべてのユーザーがmyTurf資格情報を持っていることを確認します。myTurf ソフトウェアガイドを参照してください。
-
myTurf 内で、マシンを資産として追加します。myTurf ソフトウェア ガイドを参照してください。
携帯電話サービスまたはRTKプランの有効化または更新
-
Toroの資料にアクセスできる技術者は、GeoLinkサービス センターで携帯電話サービスまたはRTKプランを有効化または更新するための手順を参照可能です。
Note: マシンを自律的に操作するには、両方が必要です。
-
「GeoLinkアクティベーション プロセス」のサービスブルティンを検索します。
-
サービスブルティン内の手順に従って完了します。
続ける前に、Toroが携帯電話とRTKの資格情報を送信するのを待ちます。
-
キーを差し込んで ON 位置に回す。
-
GeoLink芝刈り機監視アプリを使ってマシンに接続する。
-
上部のメニューバーから、設定ボタンを選択します。
-
ローカル参照ポイントで、マシンがGNSS RTKの位置特定に使うローカル参照ポイントの座標と高さを設定する。
Note: 座標には十進度を使い、高さにはメートルを使います。
-
NTRIP補正の下で、NTRIPキャスターの情報を入力する。
-
視覚情報の下で、RTKサブスクリプションの情報を入力する。
携帯電話とRTKの接続確認
Note: このテストは、マシンが稼働するコースの現地で実行することを推奨します。これにより、通常の動作中にマシンに送信される信号の強さを正確に把握できます。
-
キーを差し込んで ON 位置に回す。
-
マシンを屋外まで運転する。
-
GeoLink芝刈り機監視アプリを使ってマシンに接続する。
-
上部のメニューバーから、診断ボタンを選択する。
-
モバイル ネットワークで、マシンへの携帯電話接続があることを確認する。
-
位置特定で、マシンへのRTK接続があることを確認する。
Note: マシンが携帯電話ネットワークまたはRTKベース ステーションに接続するまで数分かかる場合があります。
物体検出システムの検証
自律モードを有効にする前に、物体検出システムのセンサーが正常に機能していることを検証する。物体検出システムの検証を参照してください。
自律制御システム(ACS)の検証
-
キーを差し込んで ON 位置に回す。
-
マシンを屋外まで運転する。
-
自律モードを有効にするには、自律/手動モード スイッチを2秒間左に押し続ける。自律/手動モードスイッチを参照してください。
-
GeoLink芝刈り機監視アプリを使ってマシンに接続する。
-
上部のメニューバーから、診断ボタンを選択する。
-
診断フィールドを選択すると、詳細なドロップダウン メニューが開きます。ACSが正しく動作していることを確認する。
GNSSおよびIMUシステムの検証
-
マシンの天井のラインを見て、曲がったアンテナがないか調べる。
-
キーを差し込んで ON 位置に回す。
-
マシンを芝刈りエリアまで運転する。
-
テストCMA をセットアップする。自律作業領域のマッピングおよび連続した刈り取り領域のマッピングを参照してください。
-
芝刈り機に実行させるミッションを作成する。最初のタスクとして、フェアウェイ上で時計回りのクリーンアップパスを実行さる。次に、同じフェアウェイで反時計回りのクリーンアップパスを実行する。ミッションの作成およびカスタム芝刈りパターンの作成を参照してください。
-
ミッションを実行する。ミッションの実行を参照してください。
-
ミッション中にマシンを観察し、時計回りのパスと反時計回りのパスの間で矛盾した経路がないか確認します。
Important: 違いが見られる場合、アンテナが中央に配置されていないことが原因である可能性があります。テクニカルサポートにコンタクトしてください。
製品の概要
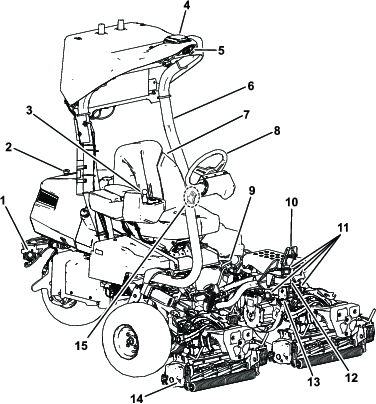
キースイッチ
キースイッチには 3 つの位置があります: OFF、ON/、STARTです(図 9)。
エンジンの始動・停止、およびエンジンを使用せずにマシンを動作させる時にこのキーを使用します;エンジンの始動手順、エンジンの停止手順、エンジンを使用せずにマシンを運転する場合を参照。
機能コントロールスイッチ
機能コントロールスイッチ(図 8)には、2種類の走行モード位置とニュートラル位置とがあります。
-
ニュートラル位置:ニュートラル及びバックラップ位置
-
刈り込み位置:芝刈り位置
-
移動走行位置:移動走行位置
走行中に刈り込みから移動走行へ、またその逆に移動走行から刈り込みへ(ニュートラルで止めずに)切り替えることができます。マシンを損傷する心配はありません。
移動走行または刈り込みからニュートラルへ切り替えるとマシンは停止します。ニュートラルから刈り込みまたは移動走行へ切り替えようとした時にペダルがニュートラル位置になり、アドバイスが表示されます。
昇降ジョイスティック
昇降ジョイスティック(図 8)はカッティングユニットを昇降させます。また、機能コントロールスイッチの位置により、カッティングユニットの回転開始・停止も行います:
-
機能コントロールスイッチがニュートラル位置にある場合:ジョイスティックを前または後ろに倒すことによりカッティングユニットが下降または上昇動作を行いますが、リールは回転しません(バックラップモードの時のみこの状態でリールが回転します)。
-
機能コントロールスイッチが刈り込み位置にある場合:ジョイスティックを前に倒すとカッティングユニットが下降してリールが回転し、刈り込みを開始します。ジョイスティックを後ろに引くとリールは停止して上昇します。
後ろに軽く引いて手を放すとカッティングユニットを上昇させずにリールの回転だけを止めることができます。ジョイスティックを再び前に倒せばリールが回転を開始、後ろに引けばカッティングユニットが上昇します。この機能はインフォオセンターで設定を行う必要があります;タップオフの遅れ時間を設定するを参照。
-
機能コントロールスイッチが移動走行位置にある場合:カッティングユニットを上昇させることはできますが回転させることはできません。カッティングユニットを下降させようとすると、インフォセンターにアドバイスが表示されます。
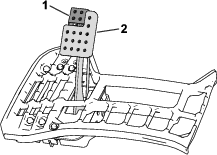
走行ペダル
ステアリングアーム・ロックベダル
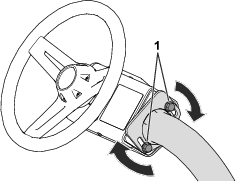
このペダル(図 10)を踏むとステアリングアームの高さを調整できるようになります;使いやすい高さに調整できたらペダルから足を離せばアームは再びロックされます。
ブレーキペダル
ブレーキペダル(図 12)を踏み込むと車両は停止します。
駐車ブレーキ
機体が動かないように駐車ブレーキ(図 12)を掛けてください。駐車ブレーキを掛けるには、ブレーキペダルを踏み込み、ペダルの上部についているラッチを踏み込みます。ブレーキを解除するには、ラッチが落ちるまでペダルを踏み込みます。
自律制御
緊急停止(Eストップ)スイッチ
監視アプリの停止ボタンに加えて、マシンの背面にある緊急停止スイッチを押すことでもマシンを停止させることができます。
緊急停止を解除するには:
-
スイッチを外側に引っぱる。
-
自律モードを有効にするには、自律/手動モードスイッチをリセットする。
Important: Eストップスイッチは、マシンが自律モードで動作している場合にのみ機能します。Eストップスイッチをアクティブにしても、手動モードで動作しているマシンには影響しません。
自律/手動モードスイッチ
自律/手動モードスイッチを左に2秒間押し続けると、自律モードが有効になります。
このスイッチを右側に押すと手動モードが有効になります。
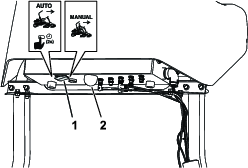
自律ステータスライトは、マシンの現在の自律状態を示します。
-
白点灯 - ACSがオンで手動モード
-
緑色点灯 - 自律モード実行中。接近禁止。
-
緑色点滅 - 自律モードだが、物体が近接
-
赤点灯 - 安全に接近可能、マシンは停止中
GeoLink Mow監視アプリ
GeoLink Mow監視アプリは、自律芝刈り機の設定と操作に使われるツールです。
| メニューバー項目 | 内容 |
| ホーム | ホーム メニューは Web アプリの最初の画面で、ダッシュボード、ミッション、マップ、設定メニューへのショートカットのほか、利用規約や法的通知があります。 |
| ダッシュボード | ダッシュボードメニューには、現在のマシンステータスとミッションステータスが一覧表示されます。画面下部のコントロール ボタンを使って、マシンをリモートで制御することも可能です。 |
| ミッション | ミッションメニューには、新しいミッションを作成する領域と、現在のミッションとミッション履歴を表示する領域があります。このメニュー内でカスタムの芝刈りパターンを作成します。 |
| マップ |
マップメニューには、施設の地図とマップされたフェアウェイが表示されます。また、作業領域やその他の自律機能をマッピングするための制御も含まれています。マシンが作業している間、それはミッション中のマシンを監視するために使用できます |
| SETTINGS(設定) | 設定メニューでは、RTKの設定と資格情報、一般的な操作設定、マシンの個人設定を変更できます。 |
| ヘルプ |
ヘルプメニューでは、マップデータ、マシンログ、取扱説明書、パフォーマンスデータ、ソフトウェアバージョン情報にアクセスできます。 |
| DIAGNOSTICS(診断機能) |
診断メニューには、ハードウェア、センサー、位置および接続情報など、マシンのさまざまな部分の状態が一覧表示されます。この情報を使うと、どのマシンの制御がアクティブか、無効か、または問題が発生しているかをすぐに知ることができるため、マシンのトラブルシューティングに使用できます。 |
| ログアウト |
myTurf アカウントからログアウトします。 |
| メニュー項目 | 内容 | |
| ローカル基準点 | ||
| 緯度 | マシンがGNSS RTKの位置特定に使うローカル参照ポイントの緯度を設定します。小数度形式を使います。 | |
| 経度 | マシンがGNSS RTKの位置特定に使うローカル参照ポイントの経度を設定します。小数度形式を使います。 | |
| 高さ | マシンがGNSS RTKの位置特定に使うローカル参照ポイントの高さ(メートル)を設定します。 | |
| NTRIP修正 | ||
| ホスト名 | NTRIP(RTK)キャスターの接続名URLを設定します。 | |
| ポート番号 | キャスターのポート番号を設定します。 | |
| マウントポイント | キャスターから送信されるGNSSデータストリームのマウントポイント名を設定します。 | |
| NMEA GGAメッセージ | ||
| 必須 | NMEA GGAメッセージを有効または無効にします。必須はデフォルトで有効になっています。 | |
| 更新期間 | NMEA GGAメッセージの頻度を設定します。デフォルト設定は5秒です。 | |
| 資格情報 | ||
| ユーザー名 | RTK サブスクリプションのユーザー名を入力します。 | |
| パスワード | RTKサブスクリプションのパスワードを入力します。 | |
| マップ | ||
| マップをロック | マップされた領域を変更、削除、または新規作成する機能を削除します。 | |
| 刈り | ||
| オーバーラップ | 刈り取りパス中のオーバーラップの量を設定します。 | |
| マシン速度 | ||
| 主な刈り取り速度 | 刈り取り作業中のマシンの最大許容速度を設定します。 | |
| 外周刈り取り速度 | クリーンアップ パス中のマシンの最大許容速度を設定します。 | |
| 移動走行速度 | 刈り取りをしていないときのマシンの最大許容速度を設定します。 | |
| マシン情報 | ||
| フレンドリーな名前 | マシンの名前を設定します。監督者の携帯電話に送信されるメッセージで使われます。 | |
| ユーザー情報 | ||
| LANGUAGE(言語) | ユーザー インターフェイスの言語を設定します。 | |
| UNITS(単位) | アプリの測定単位を設定します。 | |
| 設定を工場出荷時の状態にリセット | 選択すると工場出荷時のデフォルト設定に戻ります。 | |
Note: 設定を変更した後、保存を選択して設定を保存し、設定を有効にするためにマシンのキーサイクルを実行します。
| メニュー項目 |
| モバイルネットワーク > キャリア名 |
| モバイルネットワーク > 接続タイプ |
| モバイルネットワーク > 信号品質 |
| 位置特定 > GNSSステータス |
| 位置特定 > GNSS精度 |
| 位置特定 > 有効な衛星 |
| 位置特定 > ローバー衛星 |
| 位置特定 > ベース衛星 |
| 位置特定 > RTK接続 |
| 位置特定 > 位置特定精度 |
| 緊急停止 |
| センサー > ライダー距離 |
| センサー > ソナーフロントレフト |
| センサー > ソナーリアレフト |
| センサー > ソナーリアライト |
| センサー > ソナーフロントライト |
| センサー > ソナートップレフト |
| センサー > ソナートップライト |
| センサー > レーダーフィールドニア |
Note: 信号品質またはRTK接続フィールドに不良と表示される場合、マシンが停止する場合があります。マシンが動作するには、携帯電話ネットワークまたは RTK基地局への接続が十分に強力ではありません。
| メニュー項目 | 内容 | |
| マシンのステータス | ||
| 状態 | マシンの現在の状態を表示します。マシンの状態のリストについては、マシンの状態を参照してください。 | |
| GNSS: | GNSS信号の品質を表示します。90%以上は良好、60%以下は不良です。GNSS/ローカリゼーションの問題を診断するには、診断メニューとローカリゼーションリストを使います。 | |
| 速度 | マシンの現在の速度を表示します。 | |
| ミッションステータス | ||
| 状態 | 現在のミッションの状態、ミッションの進行状況、ミッションを完了するまでの残り時間を表示します。ミッションの状態のリストについては、ミッションの状態を参照してください。ミッションが選択されていない場合、リストは空白になっています。 | |
| ミッションID | 選択されたミッションのID番号を表示します。 | |
| フェアウェイ | 現在のミッションの内でこれから刈り取るフェアウェイと、各フェアウェイの進行状況バーを表示します。 | |
| パターン | 現在のミッションの刈りパターンを表示します。読み込みには最大10秒かかる場合があります。 | |
| 進捗 | 現在のミッションの進行状況のパーセンテージを表示します。読み込みには最大10秒かかる場合があります。 | |
| 残り時間 | ミッションが完了するまでの予想時間を表示します。 | |
| 続行 | ミッション中のマシンが次のフェアウェイを刈る予定の10分前にボタンが表示されます。ダッシュボードへのリンクを含むテキストメッセージが監督者のモバイルデバイスに送信されます。ボタンを選択し、承諾合意を読み、許容を選択すると、マシンが次のフェアウェイに進むことができます。 | |
—マシンの状態
マシンの状態表示の意味については、次の表を参照してください:
| ディスプレイ | 意味 | ソリューション(該当する場合) |
| 未知の | 不明なエラー | マシンのキーサイクルを実行。 Note: これには最大5分かかる場合があります。 |
| 組み立て | セットアップが進行中。 | マシンから離れて待機してください。 |
| アイドル | マシンはアイドル状態に設定されています。 | モードを手動または自動に設定します。 |
| 手動モード | マシンは手動モードに設定されています。 | |
| 組み立て | マシンは自動に設定されています。 | Goを押して通知を受け入れます。 |
| 通知待ち | アプリは通知の受け入れを待っています。 | Goを押して通知を受け入れます。 |
| 校正中 | マシンは自律モードを開始しています。 | 少なくとも3分間待って、マシンから離れます。 |
| スタンバイ中 | マシンは自律モードでアイドリング中です。 | ミッションを作成し、Goを押します。 |
| 実行中 | マシンは現在ミッションを実行中です。 | |
| サイドストップに移動 | マシンは側道に駐車しています。 | |
| ピックアップに移動 | マシンはピックアップポイントに移動します。 | |
| ポイントに移動 | マシンはオペレーターが地図上で選択した地点に向かっています。 | |
| 駐車中 | マシンは駐車モードになっています。 |
Note: ソリューションが待機だけの場合、状態が別の状態に進むには30秒待つだけで十分です。そうでなければ、マシンのキーサイクルを実行します。
—ミッションの状態
ミッションの状態表示の意味については、次の表を参照してください:
| ディスプレイ | 意味 | ソリューション(該当する場合) |
| エラー | 不明なエラー | マシンのキーサイクルを実行。 Note: これには最大5分かかる場合があります。 |
| 組み立て | 設定 | お待ちください. |
| 初期化 | 初期化 | お待ちください. |
| 読み込中... | ミッションをローディング | お待ちください. |
| 準備中 | ミッションをローディング | お待ちください. |
| アイドル | ミッションが未選択 | ミッションを作成し、Goを押します。 |
| 刈り | 刈り | |
| 一時停止した | ミッションは一時停止 | Goを押してミッションを再開します。 |
| キャンセル済 | ミッションはキャンセルされました。 | ミッションを作成する。 |
| 完了済み | ミッションは完了しました。 | 新規ミッションを作成し、Goを押します。 |
| 待機 |
Note: ソリューションが待機だけの場合、状態が別の状態に進むには3分待ちます。進まない場合は、マシンのキーサイクルを実行します。
—リモートマシンコントロール
ダッシュボード画面には、ミッション中にマシンを制御するためのボタンがあります。

—アドバイスおよび障害、履歴ログ
マシンが重要なアクションを実行しているときや障害が発生すると、診断メッセージを表示します。
Note: 右上のボタンを使って重大度レベルを選択し、重大度レベルに応じてメッセージをフィルタリングします。
| アイコン | 意味 |
情報 | 重要なアクションに関するアドバイス情報。 |
問題 | マシンに問題がありますが、マシンは引き続き動作します。 |
エラー | マシンに問題が発生し、動作が停止します。 |
| ディスプレイ | 意味 | ソリューション(該当する場合) |
| ミッション##をキャンセル | ミッションはオペレーターによってキャンセルされました。 | 新規ミッションを作成し、Goを押します。 |
| ミッション##をキャンセル中 | ミッションはオペレーターによってキャンセル中です。 | 新規ミッションを作成し、Goを押します。 |
| ミッション##を完了 | ミッションが終了しました。 | 新規ミッションを作成し、Goを押します。 |
| ミッション ##にエラー | ミッションにエラーが発生したため、マシンは動作できません。 |
|
| ミッション##の実行中 | ミッションを実行中です。 | |
| ミッション ##を始動中 | ミッションがまもなく始まります。 | |
| ミッション##をローディング中 | ミッションの詳細を読み込んでいます。 | |
| ミッション##を停止する | ミッションはオペレーターによって停止されました。 | |
| サイドストップ地点に到着。 | オペレータの指示どおり、マシンはサイドストップ地点に到着しました。 | |
| ピックアップ地点に到着。 | オペレータの指示どおり、マシンはピックアップ地点に到着しました。 | |
| システムが起動。 | マシンキーがON位置にあり、ACSシステムが起動します。 | |
| 指定地点に到着。 | マシンはオペレーターが選択した指定地点に到着しました。 | |
| ミッションの準備不可 | ミッションの詳細を処理中にエラーが発生 | |
| 難しい開始位置。 | マシンは難しいスタート位置にあります。 | |
| ミッション##の実行準備中 | ミッションを処理中です。 | |
| マップが空 | すべてのマップデータがデータベースから欠落しています。 |
メニュー
| メニュー項目 | 定義 |
| 地図データ |
マシンで使われるマップファイルをダウンロード、エクスポート、およびインポートします。マップをフリート内の他のマシンにエクスポートするか、芝生の削れを減らすために、異なる移動経路を持つ追加のマップをマシンへインポートします。マップデータの保存とエクスポートを参照してください。 |
| ログ |
このセクションを使って、マシンからログをダウンロードします。ログを全部ダウンロードするか、最新のログ レポートのみをダウンロードするかのオプションがあります。フルサンプルのロギングコントロールを使って、特定の期間をログに記録することもできます。 Note: ファイルサイズが大きいため、携帯電話接続中にこれらのファイルをダウンロードすることは推奨されません。 |
| 手動 |
オンラインの操作マニュアルを表示するには、このリンクを選択してください。 |
| ACSパフォーマンス カウンター |
自律マシンのパフォーマンスと履歴に関連するデータを表示します。 |
| ソフトウェア情報 |
さまざまな自律システムのソフトウェア バージョンを表示します。 |
インフォセンター
インフォセンターディスプレイの使用
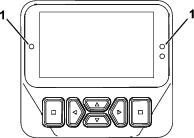
インフォセンターディスプレイ(図 16) には、マシンの動作ステータス、さまざまな診断、その他の情報など、マシンに関する情報が表示される。
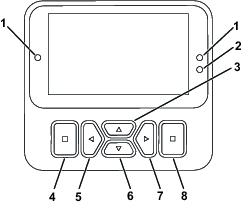
Note: 各ボタンの機能はメニューの内容によって、変わります。各ボタンについて、その時の機能がアイコンで表示されます。
ナビゲーション ボタンを使って、いくつかの画面とメニュー項目の間を移動します。
-
起動画面: キーを ON 位置にした後、マシンの現在の情報を数秒間だけ表示します。
-
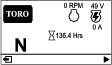
主画面(図 17): キーが ON 位置にある時に、マシンの現在の情報を表示します。
-
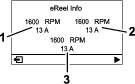
eリールモーター画面(図 18):各カッティングユニットモーターの回転数と電流を表示します
-
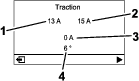
トラクションモーター画面 (図 19): 現在のステアリング角度と各トラクション モーターに割り当てられたアンペア数が表示されます。
-
メインメニュー: インフォセンターのメニューを理解するを参照。
 | アワーメータ |
 | 機能コントロールスイッチがニュートラルであることを示します |
 | 機能コントロールスイッチが移動走行設定であることを示します |
 | 機能コントロールスイッチが刈り込み設定であることを示します |
 | 手動モードの場合、オペレーターは運転席に座る必要があります。 |
 | 駐車ブレーキが掛かっている。 |
 | 電動駐車ブレーキが作動しています。 |
 | エンジンを掛ける。 |
 | エンジン |
 | PTOが ON。 |
 | PTO が解除されている。 |
 | バッテリー |
 | カッティングユニットが上昇中であることを示します。 |
 | カッティングユニットが下降中であることを示します。 |
 | アクティブ |
 | 非アクティブ |
 | 以前 |
 | 次へ |
 | 増加 |
 | 減少 |
 | 前画面 |
 | 次画面 |
 | 値を増やす |
 | 値を減らす |
 | メニュー |
 | 上下にスクロール |
 | 左右にスクロール |
インフォセンターのメニューを理解する
メイン メニューにアクセスするには、情報画面のいずれかで戻る/終了ボタンを押します。
各メニューにおいてどのような内容が表示されるかは、以下の表をご覧ください。
| メニュー項目 | 内容 |
| FAULTS(不具合) | FAULTSメニューには、最近に記録された不具合が表示されます。サービスマニュアルに不具合 メニューとその内容の詳細が解説されています。または弊社ディストリビュータにお問い合わせください。 |
| SERVICE(整備) | SERVICEメニューでは、使用時間、積算記録などの情報を見たりキャリブレーションを行うことができます。カッティングユニットのバックラップを行うのもこの画面です。Service(整備)の表を参照。 |
| DIAGNOSTICS(診断機能) | DIAGNOSTICSメニューでは、マシンにおいて現在発生している不具合やそのデータが表示されます。この情報により、どのマシン制御がオン/オフになっているかが分かり、制御レベル (センサー値など) が一覧表示されるため、特定の問題のトラブルシューティングに使用できます。Diagnostics(診断)の表を参照。 |
| SETTINGS(設定) | [設定] メニューを使うと、情報センター表示の設定を変更することができます。Settings(設定)の表を参照。 |
| マシンの設定 | マシンの設定メニューでは、リール速度、最大刈り取り速度、最大搬送速度などのマシンの設定を調整することができます。マシンの設定の表を参照。 |
| ABOUT (マシンについて) | ABOUTでは、モデル番号、シリアル番号、ソフトウェアのバージョンなどを確認することができます。About(マシンについて)の表を参照。 |
自律運転 | 自律メニューには、マシンの自律動作をテストするための設定がリストされます。 |
| メニュー項目 | 内容 |
| HOURS | キー、エンジン、リール、バックラップが ON になっていた時間の積算値と次回の定期整備までの時間。 |
| COUNTS(回数) | 始動回数、刈り込み回数、タップオフ回数、バックラップかい数、エンジンスタータが30秒間以上連続で使用された回数を表示。 |
| BACKLAP(バックラップ) | カッティングユニットのバックラップの開始と停止(これはキーを OFF にすることでも行うことができます)。 |
| CALIBRATION(キャリブレーション) | ステアリングシステム、走行システム、昇降アクチュエータのキャリブレーション。詳細についてはサービスマニュアルを参照のこと。 |
| メニュー項目 | 内容 |
| ENGINE | エンジンを始動するための入出力を示します。 |
| 48V有効 | 48Vシステムの入出力を示します。 |
| ジェネレータ | ジェネレーターの入出力を示します。 |
| 走行 | 走行ペダルの入出力を示します。 |
| ステアリング | ステアリングシステムの入出力を示します。 |
| 昇降 | カッティングユニットを昇降させるための入出力を示します。 |
| PTO | 走行ペダルの入出力を示します。 |
| CAN統計 | CANの入出力を示します。 |
| 12Vシステム | 12Vシステムの入出力を示します。 |
| 自律運転 | 自律システムの入出力を示します。 |
| メニュー項目 | 内容 |
| ピンを入力する | 許可された人(スーパーインテンデントや整備士)が PIN コードを入力してアクセスできます |
| BACKLIGHT(バックライト) | LCD 表示の明るさを調整します。 |
| LANGUAGE(言語) | インフォセンターの表示に使う言語を選択することができます。 |
| フォントサイズ | インフォセンターのフォントのサイズを制御します。 |
| UNITS(単位) | インフォセンターで表示される項目の単位を選択することができます。ヤードポンド系またはメートル系から選択します。 |
| 保護設定 | 保護項目の保護設定を行います。 |
| デフォルトにリセットする | インフォセンターを初期状態にリセットします。 |
| メニュー項目 | 内容 |
| TAPOFF TIME(タップオフ時間) | タップオフの遅れ時間を設定します。 |
| REEL SPEED(リール速度) | カッティングユニットのブレードの速度を制御します。 |
| LOWER SPEED(速度下げ) | 刈り込み時にカッティングユニットが降下する時の速度を設定します。 |
| バックラップ速度 | バックラップ速度を制御します。 |
| CLIP CONTROL(クリップコントロール) | 自動クリップ制御機能をオンまたはオフにします。 |
| BLADE COUNT(刃数) | 各リールの刃数に合わせて設定してください。この設定は クリップコントロール を ONにして使用する時のみ必要となります。 |
| 刈り高さ | 希望刈り高を設定します。この設定は クリップコントロール を ONにして使用する時のみ必要となります。 |
| MAX MOW(最大刈り込み速度) | 刈り込み時の最大走行速度を設定します。 |
| MAX TRANSPORT(最大移動速度) | 移動走行時の最大走行速度を設定します。 |
| MAX REVERSE(最大後退速度) | 後退走行時の最大走行速度を設定します。 |
| SLOW & TURN(スロー&ターン) | スロー・イン・ターン機能の ON/OFF を行います。 |
| 3WD キット | 3WD キットの ON/OFF を行います。 |
| メニュー項目 | 内容 |
| MODEL | マシンのモデル番号を表示します。 |
| SN(シリアル番号) | マシンのシリアル番号を表示します。 |
| S/W REV | マスターコントローラのソフトウェアの改訂番号を表示します。 |
| S/W Rev ACS | ACSソフトウェアのリビジョンを一覧表示します。 |
| XDM-2700 | インフォセンターのソフトウェアの改訂番号を表示します。 |
| 1番カッティングユニット | センターカッティングユニットモーターのソフトウェアリビジョンをリストアップします。 |
| 2番カッティングユニット | 左前カッティングユニットモータ用ソフトウェアのバージョン名です。 |
| 3番カッティングユニット | 右前カッティングユニットモータ用ソフトウェアのバージョン名です。 |
| ジェネレータ | 発電機のシリアル番号を表示します。 |
| リフトロワー1 | 中央カッティングユニット用ソフトウェアのパーツ番号とバージョン名です。 |
| リフトロワー2 | 左前カッティングユニット用ソフトウェアのパーツ番号とバージョン名です。 |
| リフトロワー3 | 右前カッティングユニット用ソフトウェアのパーツ番号とバージョン名です。 |
| TRACTION1 | 右前走行モータ用ソフトウェアのパーツ番号とバージョン名です。 |
| TRACTION2 | 左前走行モータ用ソフトウェアのパーツ番号とバージョン名です。 |
| TRACTION3 | 3WD キット(が搭載されてい場合)用ソフトウェアのパーツ番号とバージョン名です。 |
| STEERING(ステアリング) | リアステアリングモータ用ソフトウェアのパーツ番号とバージョン名です。 |
| メニュー項目 | 内容 |
| 芝刈りをエミュレートする | 自律動作は実行されますが、カッティングユニットは動作しません。 |
| ACSを下方向にオーバーライド | 自律動作は実行されますが、カッティングユニットは下限値で許可された範囲内でのみ下降します。 |
| 下限値 | ACSによって制御される下方向位置のパーセンテージ。85では、カッティングユニットが下がっても地面にぶつからないことが観察できます。 |
Note: 保護メニューで保護されます
― アクセスには PIN の入力が必要です;アクセス制限付きメニューへのアクセスを参照。
アクセス制限付きメニューへのアクセス
Note: 出荷時に設定されている デフォルト PIN は 0000 または 1234 です。PIN を変更後、PIN を忘れてしまった場合には、弊社ディストリビュータにご相談ください。
-
メイン メニューから、設定メニューまで下にスクロールし、選択ボタン (図 20) を押します。

-
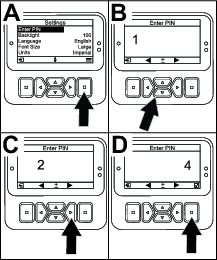
設定メニューで、PIN を入力までスクロールし、選択ボタン (図 21A) を押します。
-
PINコードを入力するには、正しい最初の桁が表示されるまでナビゲーション ボタンを上下に押し、次に右のナビゲーション ボタンを押して次の桁 (図 21B と 図 21C) に進みます。最後の桁が入力されるまでこの手順を繰り返します。
-
選択ボタン(図 21D)を押します。
Note: ディスプレイがPINコードを受け入れ、保護されたメニューのロックが解除されると、画面の右上隅に
 が表示されます。
が表示されます。 -
保護されたメニューをロックするには、キースイッチをオフの位置に回し、次にオンの位置に回転する。
「パスワード保護メニュー」を閲覧・設定変更するには
-
設定で、設定の保護まで下にスクロールします。
-
PINコードを入力せずに設定を確認・変更するには、セレクトボタンでプロテクト設定を
 (オフ)に変更します。
(オフ)に変更します。 -
PINコードを使って設定を表示および変更するには、選択ボタンを使ってプロテクト設定を (
 オン) に変更し、PINコードを設定し、イグニッションスイッチのキーをオフの位置に回し、次にオンの位置に回します。
オン) に変更し、PINコードを設定し、イグニッションスイッチのキーをオフの位置に回し、次にオンの位置に回します。
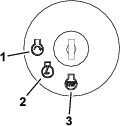
診断ランプについて
-
赤の点滅 - アクティブな故障
-
赤の点灯 - アクティブな勧告
-
青の点灯 - キャリブレーション/ダイアログ メッセージ
-
緑色の点灯 - 通常動作
マシンが手動モードではない場合の標準的な表示メッセージ
マシンが手動モードでない場合、#1LED が青色に点灯し、次のメッセージが表示される場合があります。マシンを操作できるようになるまで待つか、ディスプレイの指示に従ってください。
-
自律走行の準備ができていないマシン
-
ACSの準備ができていません。お待ちください
-
AUTONOMOUS ENGAGE を2秒間押し続ける
-
自律運転がアクティブ、マシンを離れてアプリを使用する
アドバイス
マシンの機能に追加のアクションが必要な場合は、オペレーターへのアドバイスがInfoCenter画面または監視アプリに自動的に表示されます。たとえば、走行ペダルを踏み込んだ状態でエンジンを始動させようとした場合には、走行ペダルを ニュートラル 位置にしてくださいという表示が出ます。
表示される各アドバイスには、アドバイスコード (文字と数字)、問題 (メッセージの最初の行、たとえば、自律拒否、自律中止)、原因 (表示されるアドバイスの原因)、および解決策 (テキストの2行目) があります。
Note: アドバイスは障害ログに記録されません。
InfoCenterのすべてのアドバイスについては、次の表を参照してください:
Note: いずれかのキーを押すと、InfoCenter表示画面からアドバイスを消去できます。
| コード | 問題 | 原因 | 処置 |
| B2900 | 自律動作の拒否 | 駐車ブレーキ:入 | 駐車ブレーキを解除する |
| B2901 | 自律動作の拒否 | 刈り取り状態でない | 機能制御スイッチを刈り取りに動かす |
| B2902 | 自律動作の拒否 | オペレーターが着座している | 運転席を離れる |
| B2903 | 自律動作の拒否 | 走行ペダルが押されている | トラクションペダルをニュートラル位置に戻す |
| B2904 | 自律動作の拒否 | ジョイスティックスイッチが操作された | ジョイスティックスイッチを解除する |
| B2905 | 自律動作の拒否 | ハンドルの動きがある | ハンドルの動きを止める |
| B2906 | 自律動作の拒否 | マシンの準備ができていない | 待つか障害に対処する |
| B2907 | 自律動作の拒否 | ACSの準備ができていない | 待つか障害に対処する |
| B2908 | 自律動作の拒否 | 様々な | 監視アプリを参照する |
| B2910 | 自律動作の中止 | オペレータが中止した | 自動/手動モードスイッチをリセットする |
| B2911 | 自律動作の中止 | 障害発生中 | マシンのチェックが必要。アクティブな障害を解決する |
| B2912 | 自律動作の中止 | オペレーターの在席が検知された | 自動/手動モードスイッチをリセットする |
| B2913 | 自律動作の中止 | 障害物が検出された | 自動/手動モードスイッチをリセットする |
| B2914 | 自律動作の中止 | 様々な | 監視アプリを参照する |
| B2940 | 自律性の低下 | 様々な | 監視アプリを参照する |
| B2950 | 自律動作動作一時停止 | 様々な | 監視アプリを参照する |
監視アプリに関する全てのアドバイスについては、次の表を参照してください:
| コード | 問題 | 原因 | 処置 |
| B2908-1 | 自律運転を拒否 | マシンはAOAの外側にある | マシンをAOAに移動する |
| B2908-2 | 自律運転を拒否 | マップが無効 |
|
| B2914-1 | 自律運転を中止 | 許容される最大傾斜を超過 |
|
| B2914-2 | 自律運転を中止 | マシンは自律運転を終了 |
|
| B2914-3 | 自律運転を中止 | IMUが正常ではないため動作不可 |
|
| B2914-4 | 自律運転を中止 | 緊急停止が作動 | 緊急停止ボタンを解除し、自律運転をリセットする |
| B2914-5 | 自律運転を中止 | フロントレフトソナーが作動 |
|
| B2914-6 | 自律運転を中止 | リアレフトソナーが作動 |
|
| B2914-7 | 自律運転を中止 | リアライトソナーが作動 |
|
| B2914-8 | 自律運転を中止 | フロントライトソナーが作動 |
|
| B2914-9 | 自律運転を中止 | 近くのレーダーフィールドが作動 |
|
| B2914-10 | 自律運転を中止 | トップレフトソナーが作動 |
|
| B2914-11 | 自律運転を中止 | トップライトソナーが作動 |
|
| B2914-12 | 自律運転を中止 | 自律/手動モードスイッチが手動モードになっている |
自動/手動モードスイッチをリセットする |
| B2940-1 | 自律運転性能の低下 | マシンの近くの障害物が動作に影響を与えている |
|
| B2940-2 | 自律運転性能の低下 | PCの温度が動作限界外 | パフォーマンスは低下する場合はあるが、このシステムは、マシンは完全に動作する問題が解決しない場合は、テクニカルサポートにお問い合わせる |
| B2940-3 | 自律運転性能の低下 | 車輪が空転 |
|
| B2940-4 | 自律運転性能の低下 | IMUエラーが動作限界外 | パフォーマンスは低下する場合はあるが、このシステムは、マシンは完全に動作する問題が解決しない場合は、テクニカルサポートにお問い合わせる |
| B2940-5 | 自律運転性能の低下 | 基地局までの距離が動作限界外 | パフォーマンスは低下する場合はあるが、マシンは完全に動作する |
| B2940-6 | 自律運転性能の低下 | モバイルネットワークに未接続 |
|
| B2940-7 | 自律運転性能の低下 | ライダーの温度が動作限界外 |
|
| B2950-1 | 自律運転を一時停止 | マシンの現在の位置から最後の位置までの距離が動作限界外 |
|
| B2950-2 | 自律運転を一時停止 | ナビゲーションエラー |
|
| B2950-3 | 自律運転を一時停止 | PCの応答時間が動作限界外 | パフォーマンスは低下する場合はあるが、このシステムは、マシンは完全に動作する問題が解決しない場合は、テクニカルサポートにお問い合わせる |
| B2950-4 | 自律運転を一時停止 | 基地局の信号品質が動作限界外 |
|
| B2950-5 | 自律運転を一時停止 | GNSS RTKの品質が低い |
|
| B2950-6 | 自律運転を一時停止 | マシンはマッピング中に使われたものとは異なるベースステーションに接続されている |
|
| B2950-7 | 自律運転を一時停止 | 位置精度が動作限界外 |
|
| B2950-8 | 自律運転を一時停止 | 昇降サブシステムに問題 |
|
| B2950-9 | 自律運転を一時停止 | PTOサブシステムに問題 |
|
| B2950-10 | 自律運転を一時停止 | ステアリングサブシステムに問題 |
|
| B2950-11 | 自律運転を一時停止 | トラクションサブシステムに問題 |
|
| B2950-12 | 自律運転を一時停止 | ミッションの詳細を処理中にエラーが発生 |
|
| B2950-13 | 自律運転を一時停止 | 難しい開始位置。 |
動作をスピードアップするためにマシンを広い場所に移動する |
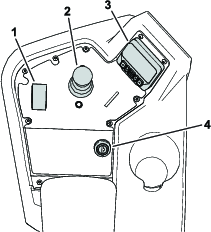
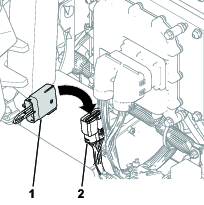
主電源コネクタ
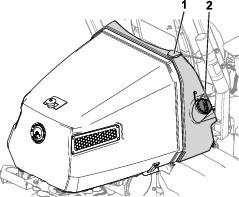
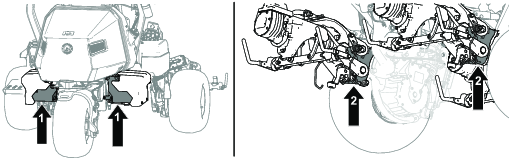
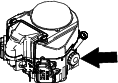
マシンの整備やカッティングユニットの取り付け、取り外し、整備などを行う際には、必ずその前に、マシンへの主電源コネクタを外して、マシンに対する給電を停止してください(図 23);コネクタは、トラクションユニット左側、横転保護バーのベース部にあります。マシンを使用するときには、コネクタを接続してください。

注意
マシンへの電源供給を切断しておかないと、誰でもがマシンを作動させることができ、重篤な人身事故になる可能性がある。
マシンに作業を行う時には必ずコネクタを外しておくこと。
燃料バルブ
寸法および重量については、図 25および仕様一覧を参照してください。
Note: 仕様および設計は予告なく変更される場合があります。
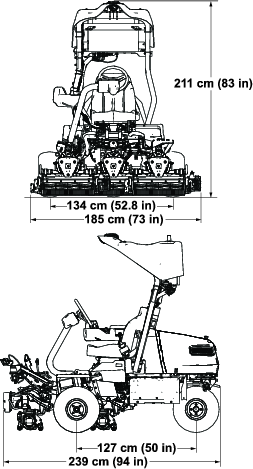
| 刈り幅 | 151 cm |
| ホイールトラック | 134 cm |
| ホイールベース | 127 cm |
| 全長 | 239 mm |
| 全幅 | 185 cm |
| 全高 | 211 cm |
| ウェイト* | 841 kg |
| *8枚刃のカッティングユニット、燃料、オペレーターなし、標準シートを備えたトラクションユニット。 | |
アタッチメントとアクセサリ
トロが認定した各種のアタッチメントやアクセサリがそろっており、マシンの機能をさらに広げることができます。詳細は弊社の正規サービスディーラ、または代理店へお問い合わせください;弊社のウェブサイト www.Toro.com でもすべての認定アタッチメントとアクセサリをご覧になることができます。
いつも最高の性能と安全性を維持するために、必ずToroの純正部品をご使用ください。他社の部品やアクセサリを御使用になると危険な場合があり、製品保証を受けられなくなる場合がありますのでおやめください。
運転操作
運転の前に
監督者の情報
マシンの展開および操作の監督者
-
監督者は、マシンが確実に操作できる状態であるようにするために、使用前にマシンを点検する責任があります。点検には以下が含まれますが、これらに限定されません:
-
毎日の作業前に、センサーが正常に機能していること、ほこりやごみがないこと、正しい方向を向いていることを検証する。
-
毎日の作業前に、必要に応じてマシンの通常の日常操作チェックリストを実行する。確認はアプリ内で行われます。
-
監督者が監督アプリ手順に記載されている基準を確認するまで、マシンは自律的に動作しません。
-
マシンによって提供されるトレーニングまたは指示に詳述されているように、追加のメンテナンスまたは準備状況のチェックを実行する。
-
自律制御アプリを介してマシンに接続されたモバイルデバイスを常に携帯する。
-
-
監督者は、自律操作の前にすべてのハザードがマッピングされているようにする責任があります。作業領域はマッピング要件の要件に従う必要があります。
-
監督者は、自律作業領域内のステージングエリアからマシンの自律動作を開始する責任を負います。資格のあるオペレーターが手動でマシンをそのステージングエリアまで運搬し、保管エリアに戻す必要があります。
-
マシンの操作前および操作中、監督者は作業領域(自律作業領域を含むがこれに限定されない)、連続した草刈りエリア、および移動経路を点検し、そこにあるハザード(以下を含むがこれに限定されない)を特定して除去する責任があります。
-
作業領域内の棒、石、破片、ゴルフ用具、飛び出たスプリンクラー、その他刃で切断したり刈り取ったりすることを意図していない物体
-
傍観者と子供たち
-
補修中のエリア、溜まった水、傷んだ芝生などの芝刈りしてはいけない領域。
-
-
マシンの自律作業が以下の理由により制限される場合(ただし、これらに限定されない)、資格のあるオペレーターがマシンを手動モードで操作して芝刈りを行う必要がある場合があります:
-
不十分な無線信号(携帯電話、GNSS接続など)
-
不十分なGNSS精度および/またはRTK補正
-
サイト評価に基づき特定されたマシンの作業領域の制限
-
AOA境界または動かせない障害物に近すぎる領域
-
監督者の毎日の作業前チェックリスト
芝刈り機を自律運転用に展開する前に、次の条件が満たされている必要があります:
マシン管理者の資格
訓練を受け、Toro認定を受けた自律型芝刈り機の監督者としての資格。
マシンの機能
-
過去12時間以内に、すべての物体検出センサーがマシンにしっかりと取り付けられ、正常に機能し、適切な方向に配置されていることが確認されている。
Note: センサーが正しく機能していることを検証するには、 物体検出システムの検証にある手順を読んで完了してください。
-
マシンの電源がオンになっていることを確認する。
-
監視アプリがマシンに接続されていることを確認する。
-
診断ページに移動する。
-
センサーリストを開く。
-
マシンの周りを歩き、各ライトが赤に変わることを確認する。フロントトップセンサーは窪地検出用のため無視してください。
-
-
刈り取りリールが良好な状態にあり、ゴミや詰まりがないことが検証されている。カッティングユニットの保守を参照方。
サイトの事前点検
すべてのフェアウェイが自律刈り取りされるよう点検し、以下のことが確認された。
-
作業領域には、マシンの操作を妨害したり、マシンが投げ出した可能性のある破片が一切ない。
-
溜まった水、木の枝、芝生以外の物体、穴、または洗い流された部分などは修復または除去されている。
-
すべての灌漑ヘッドは地面に完全に収納されている。
-
バンカーレーキ、コースマーカー、標識、ロープフェンス、可動カートマーカー、ポスト、杭など、予想される障害物はすべて自律作業領域から取り除かれている。
-
-
見物人や子供は自律作業領域内にいない。
マシンを起動した直後
マシン上のすべての音声および視覚的な警告が正常に機能していることを確認する。
-
マシンが動く前にブザーが2秒間警告音を鳴らす。
-
自律モードで運転している間、マシンの前面と背面のオレンジ色のライトが点滅を続ける。自律ステータス ライトが緑色になる。
マシンが正常に動作しない場合は、直ちに停止し、問題を修正してから操作を再開する。
このチェックリストのいずれかの項目について問題や懸念がある場合は、操作マニュアルを読んでください。
燃料についての仕様
燃料タンク容量:18.5 リットル
推奨燃料:オクタン価 87 以上の無鉛ガソリンを使ってください(オクタン価評価法は(R+M)/2 を採用)。
エタノール: エタノールを添加(10% まで)したガソリン、MTBE(メチル第3ブチルエーテル)添加ガソリン(15% まで)を使用することが可能です。エタノールとMTBEとは別々の物質です。エタノール添加ガソリン(15% 添加=E15)は使用できません。
-
エタノール含有率が 10% を超えるガソリンは絶対に使用してはなりません:たとえば E15(含有率 15%)、E20(含有率 20%)、E85(含有率 85%がこれにあたります。
-
メタノールを含む燃料は使用できません。
-
燃料タンクや保管容器でガソリンを冬越しさせないでください。 冬越しさせる場合には必ずスタビライザ(品質安定剤)を添加してください。
-
ガソリンにオイルを混合しないでください。
-
機械の性能を十分発揮させるために、きれいで新しい(購入後30日以内)燃料を使ってください。
-
これらの燃料を使用した場合には性能が十分に発揮されず、エンジンに損傷が発生する恐れがあり、仮にそのようなトラブルが発生しても製品保証の対象とはなりません。
Important: エタノール系、メタノール系のスタビライザはご使用にならないでください。アルコール系のスタビライザ(エタノールまたはメタノールを基材としたもの)は使わないでください。
燃料を補給する
-
駐車ブレーキを掛け、エンジンを停止してキーを抜き取り、動作が完全に停止するのを待つ。
-
燃料キャップの周囲をきれいに拭いてキャップを外す(図 26)。
-
燃料を補給する時は、タンク上面から約 25 mm 下まで入れる。これは、温度が上昇して燃料が膨張したときにあふれないように空間を確保するためである。
Important: 燃料タンク一杯に入れないこと。
-
給油が終わったらキャップを締める。
Note: カチッという音が聞こえればキャップは確実にしまっています。
-
こぼれた燃料はふき取る。
カッティングユニットの名称
インフォセンターでマシンの設定を調整する
インフォセンターで以下の設定の調整を行うことができます:
-
タップオフ遅延;タップオフの遅れ時間を設定するを参照。
-
刈り込み中のリール速度;刈り込み時リール速度の調整を参照。
-
バックラップ中のリール速度;バックラップ時リール速度の調整を参照。
-
クリップコントロール;クリップコントロールの調整を行うを参照。
-
刈高;刈高の調整方法を参照。
-
リールの刃数;リールの刃数の設定を変えるを参照。
-
最大刈り込み速度;最大刈り込み速度の調整を参照。
-
カッティングユニット降下速度;カッティングユニットの降下速度の設定を参照。
-
最大移動走行速度;最大走行速度の調整を参照。
-
最大後退速度;最大後退速度の調整を参照。
-
スロー・イン・ターン;スロー・イン・ターン機能の設定を参照。
-
3 WD キット装着車での 3WD の解除;3 WD キット搭載車で 3WD 機能を解除するを参照。
Note: それぞれの設定がパスワードで保護されます。保護されている設定を変更する場合にはパスワードの入力が必要となります。
タップオフの遅れ時間を設定する
インフォセンターの TAPOFF TIME 画面へ行きます。タップオフ遅れ時間の時は、カッティングユニットは停止しますが上昇しません。ジョイスティックを後ろ位置に何秒間保持したらこの機能を動作させるかを設定します。
以下の表から、遅延時間番号と、対応する遅延時間を決めます。
| 設定数値 | 遅延時間(秒) |
| 1 | OFF |
| 2 | 0.050 |
| 3 | 0.100 |
| 4 | 0.150 |
| 5 | 0.200 |
| 6 | 0.250 |
| 7 | 0.300 |
| 8 | 0.350 |
| 9 | 0.400 |
| 10 | 0.450 |
Note: 出荷時設定は1であり、これはこの機能を使用しないという設定です。
刈り込み時リール速度の調整
インフォセンターの REEL SPEED 画面へ行きます。この設定はクリップコントロール設定が OFF の時に調整できます;クリップコントロールの設定を行うを参照。
以下の表から、リール速度番号と、対応するリール速度を選びます。
| 設定数値 | リール速度(RPM) |
| 1 | 800 |
| 2 | 950 |
| 3 | 1100 |
| 4 | 1250 |
| 5 | 1400 |
| 6 | 1550 |
| 7 | 1700 |
| 8 | 1850 |
| 9 | 2000 |
Note: 出荷時の設定は 1550 rpm(速度番号 6)です。
カッティングユニットの降下速度の設定
刈り込み時にカッティングユニットが降りる時の降下速度の設定は降下速度で行います。設定は 1(もっとも遅い)から 9(最も速い)の間で行えます。
設定後、実際の降下速度を確認してください。速度は希望に応じて調整してください。
Note: 出荷時の設定は 5 です。
バックラップ時リール速度の調整
インフォセンターの BACKLAP RPM 画面へ行きます。
以下の表から、リール速度番号と、対応するリール速度を選びます。
| 設定数値 | リール速度(RPM) |
| 1 | 200 |
| 2 | 240 |
| 3 | 280 |
| 4 | 320 |
| 5 | 360 |
| 6 | 400 |
| 7 | 440 |
| 8 | 480 |
| 9 | 520 |
Note: 出荷時の設定は 200 rpm(速度番号 1)です。
クリップコントロールの調整を行う
旋回半径有線速度(RDS)システムについて
ムラのない高品質な刈高と見映えの良さを実現するために、このマシンには特許申請中の Radius Dependent Speed™(RDS)システムが搭載されています。RDS システムは、クリップコントロールと 3 輪の回転速度がそれぞれ独立して制御される機能を組み合わせたもので、これらをもとにしてそれぞれの走行モータおよびリールモータの速度を制御して、旋回しながらの刈り込み時にクリップを一定に保持して美しい刈り上がりを作りだします。
旋回しながら刈り込みを行う(外周刈り)時には、内周側のカッティングユニットは外周側のカッティングユニットよりもゆっくり回転します。そしてセンターのカッティングユニットは内側のリールと外側のリールの中間の速度で回転し、これによって、3 台のカッティングユニットが同じクリップで刈り込みを行います。旋回半径が小さくなるほど、内外のリールの速度差が大きくなります。さらに、外周刈りの最中にマシンの走行速度が変化した場合には、RDS が自動的にリール速度を変化させてそれまでと同じクリップレートに維持します。この機能により、他の乗用フェアウェイモアと比較して内側リールによる芝の削れが軽減され、三重リングが実質的に排除されます。
また、RDS システムでは、旋回中はそれぞれのホイールモータの回転速度も、リールの回転速度と同じようにコントロールされます。すなわち、内周側のホイールモータは外周側のホイールモータよりもゆっくりと回転します。これにより、旋回中の車輪の引きずりがなくなり、いわゆる「三連刈りの外周リング」が目立たなくなります。
クリップコントロールの設定を行う
インフォセンターの CLIP CONTROL 画面へ行って RDS システムの設定を行う。
-
クリップコントロールの設定が ON:マシンは刈高で設定された値と BLADE COUNT で設定されたリール刃数情報および左右のホイールの回転速度情報を使用して、それぞれのリールの回転速度を個別に制御します。
-
クリップコントロールの設定が OFF:マシンは REEL SPEED (リール速度)の設定値のみに基づいて制御を行います。
Note: 出荷時の設定は ON です。
刈高の調整方法
インフォセンターの HEIGHT OF CUT (HOC) (刈高)画面へ行きます。クリップコントロールが ON に設定されている必要があります;クリップコントロールの設定を行うを参照。
Note: 工場出荷時のデフォルト設定は12.7 mmです。
リールの刃数の設定を変える
インフォセンターの BLADE COUNT へ行きます。カッティングユニットに実際に装着されているリールの刃数に応じた数値(5, 8, 11, 14)を選択します。
Note: 出荷時の設定は 8 です。
最大刈り込み速度の調整
インフォセンターの MAX MOW(最大刈り込み)へ行きます。4.8 km/h-8.0 km/h の範囲で、0.3 km/h 刻みで調整可能です。
Note: 出荷時の設定は 6.1 km です。
最大走行速度の調整
インフォセンターの MAX TRANSPORT(最大走行)へ行きます。8.0 km/h-16.0 km/h の範囲で、0.8 km/h 刻みで調整可能です。
Note: 出荷時の設定は 16.0 km です。
最大後退速度の調整
インフォセンターの MAX REVERSE(最大後退)へ行きます。3.2 km/h-8.0 km/h の範囲で、0.8 km/h 刻みで調整可能です。
Note: 出荷時の設定は 4.0 km です。
Note: マシンのソフトウェアのバージョンが A から D までの場合、最高速度は 4.8 km/h となります。最高速度を 8.0 km/h に設定したい場合にはソフトウェアを更新してください。
スロー・イン・ターン機能の設定
インフォセンターの SLOW & TURN(スロー&ターン)でスロー・イン・ターンを設定します。スロー・イン・ターンは、グリーンを出て次の列ぞろえを行うために旋回する時に自動的に走行速度を落としてくれる機能です。
Note: 出荷時の設定は OFF です。
3 WD キット搭載車で 3WD 機能を解除する
インフォセンターの 3WD KIT へ行きます。
Note: 3 WD キットを搭載すると、キットは自動的に ON になります。
インフォセンターのダイアログメッセージについて
マシンのキャリブレーションを実行中に、インフォセンターにダイアログメッセージが表示されます。これはキャリブレーションの手順を案内するメッセージです。
以下の表に、メッセージの説明があります。
| メッセージ番号 | メッセージ |
| 1 | ペダルをニュートラルに戻してください |
| 4 | ペダルを前進一杯に踏み込んで保持してください |
| 5 | 最大前進較正に成功しました |
| 9 | 最大前進較正に失敗しました電圧が範囲外です |
| 13 | ペダルを後退一杯に踏み込んで保持してください |
| 14 | 最大後退キャリブレーションに成功しました |
| 16 | 最大後退キャリブレーションに失敗しました電圧が範囲外です |
| 17 | キャリブレーションに失敗しましたペダル位置が不明です |
| 18 | ペダルをニュートラルに戻してください続けますか? |
| 100 | キャリブレーションに入りました |
| 101 | キャリブレーション完了です |
| 102 | キースイッチをサイクル操作してください |
| 110 | キャリブレーション障害機器が反応しません |
| 111 | キャリブレーション障害機器の準備ができていません |
| 112 | キャリブレーション障害アクティブな不具合があります。 |
| 113 | キャリブレーション障害着席していません |
| 114 | キャリブレーション障害ニュートラルになっていません |
| 115 | キャリブレーション障害ニュートラルです |
| 116 | キャリブレーション障害駐車ブレーキが掛かったままです |
| 300 | ペダルをニュートラルに戻してください |
| 301 | ハンドルをセンターにしてください続けますか? |
| 302 | 手で後輪をセンタリングしてください続けますか? |
| 303 | ハンドル操作で後輪を左一杯に切ってください続けますか? |
| 304 | ハンドル操作で後輪を右一杯に切ってください続けますか? |
| 305 | 後輪のセンターが所定範囲外です |
| 306 | 後輪の角度が所定範囲外です |
| 400 | 注意:マシンはジャッキスタンドで支えてください。続けますか? |
| 401 | キャリブレーション障害コンタクタが開いたままです |
| 402 | キャリブレーション障害ペダルがニュートラルです |
| 403 | ペダルをニュートラルに戻してください |
| 404 | 車輪が停止するまで待ってください。 |
| 405 | ペダルを前進一杯に踏み込んで保持してください |
| 406 | キャリブレーションがアクティブですペダルを保持してください |
| 500 | 昇降シリンダの伸長がアクティブです |
| 501 | 昇降シリンダの収縮がアクティブです |
| 502 | ジョイスティックを下降位置操作してください。 |
| 503 | ジョイスティックを上昇位置操作してください。 |
| 504 | カッティングユニットは搭載されていますか?続けますか? |
| 1100 | 走行診断メッセージが有効になりました。 |
| 1101 | ステアリング診断メッセージが有効になりました。 |
| 1102 | 安全診断メッセージが有効化された |
ハンドルの傾斜調整
毎日の整備作業を実施する
毎日の運転前に以下の作業を行ってください:
-
エンジンオイルの量を点検する;エンジンオイルを点検するを参照。
-
リールとベッドナイフの摺り合わせを点検する;リールとベッドナイフの摺り合わせを点検するを参照。
-
タイヤ空気圧を点検する;タイヤ空気圧を点検するを参照。
-
安全インタロックを点検する;インタロックシステムのしくみ を参照。
-
燃料残量を確認し、必要に応じて燃料を補給する;燃料を補給するを参照。
-
駐車ブレーキの点検を行う;駐車ブレーキを作動させ、確実に作動することを確認する;駐車ブレーキを参照。
-
センサーを点検して洗浄する(必要に応じて)。センサーとセンサーブラケットの点検センサーの洗浄を参照してください。
運転中に
慣らし運転期間
慣らし運転期間中のオイル交換や初期整備作業については、機械に付属のエンジンのオーナーズマニュアルを参照してください。
運転開始直後 8 運転時間を慣らし運転期間とします。
この期間中の取り扱いは、本機のその後の信頼性を確保する上で非常に重要ですから、各機能や動作を入念に観察し、小さな異常でも早期に発見・解決しておいてください。また、この期間中はオイル漏れや部品のゆるみの点検を頻繁におこなってください。
エンジンの始動手順
Note: カッティングユニットの下に物が落ちていないか確認してください。
-
キーを差し込んで ON 位置に回す。
-
インフォセンターに起動画面が表示されるのを待って、キーを START 位置に回してエンジンを始動させる。
-
エンジンが始動したらキーから手を離す;キーは自動的に ON 位置に戻る。
Note: エンジンが始動しないままクランキング時間が30秒を超えると不具合判定となります。
エンジン始動後のマシンの点検
-
運転席に座ってシートベルトを締める。
-
機能コントロールスイッチを 刈り込み にする。
-
駐車ブレーキを解除する。
-
昇降ジョイスティックを前に一度倒す。
全部のカッティングユニットが降下して回転すれば正常。
-
昇降ジョイスティックを後に一度倒す。
カッティングユニットが停止し、一番上(移動位置)まで上昇すれば正常。
エンジンの停止手順
-
平らな場所に移動する。
-
機能コントロールスイッチを ニュートラル にする。
-
駐車ブレーキを掛ける。
-
エンジンを停止する時にはキーをOFF位置にする。
-
キーを抜き取る。
インタロックシステムのしくみ
| 整備間隔 | 整備手順 |
|---|---|
| 使用するごとまたは毎日 |
|
注意
インタロックスイッチは安全装置であり、これを取り外すと予期せぬ人身事故が起こり得る。
-
インタロックスイッチをいたずらしないこと。
-
作業前にインタロックスイッチの動作を点検し、不具合があれば作業前に交換修理すること。
安全インタロックは、人身事故や車両を損傷するなどの危険が存在する場合に強制的に運転を停止してオペレータや機械を保護する安全装置です。
以下の条件がそろっていないとインタロックが作動し、走行することができません:
-
駐車ブレーキが掛かっていない。
-
オペレーターが着席している (マシンが自律モードで動作している場合を除く)。
-
機能コントロールスイッチが刈り込み位置か移動走行位置にセットされている。
なお、機能コントロールスイッチが刈り込み位置にない場合には、安全インタロックが作動してリールは回転しません(バックラップの時は例外です)。
安全インタロックシステムの動作を確認する
手動モードに入れて、次の手順を実行してインターロックシステムをチェックする。
-
運転席から立ち上がってエンジンを始動し、駐車ブレーキを解除し、機能コントロールスイッチを刈り込みまたは移動走行位置にして、走行ペダルを踏み込む。
運転席に着席していない状態では走行しないのが適正。走行しなければインタロックは正常に機能している。正しく動作しないのはインタロックの故障であるから直ちに修理する。
-
運転席に座ってエンジンを始動し、駐車ブレーキを掛け、機能コントロールスイッチを刈り込みまたは移動走行位置にして、走行ペダルを踏み込む。
駐車ブレーキが掛かっている状態では走行しないのが適正。走行しなければインタロックは正常に機能している。正しく動作しないのはインタロックの故障であるから直ちに修理する。
-
運転席に座ってエンジンを始動し、駐車ブレーキを解除し、機能コントロールスイッチをニュートラル位置にして、走行ペダルを踏み込む。
機能コントロールスイッチが ニュートラル 位置の時は走行しないのが適正。走行しなければインタロックは正常に機能している。正しく動作しないのはインタロックの故障であるから直ちに修理する。
-
運転席に座り、走行ペダルをニュートラル位置にし、機能コントロールスイッチをニュートラル位置にし、駐車ブレーキを掛け、エンジンを始動し、昇降ジョイスティックを前に倒してカッティングユニットを降下させる。
カッティングユニットは降下するが回転しないのが正常。回転するのはインタロックの故障です;原因を究明し、修正してください。
移動走行モードでの運転
-
カッティングユニットが完全上昇位置にあることを確認する。
-
運転席に座り、駐車ブレーキを解除し、機能コントロールスイッチを移動走行位置にしします。
-
ラフな場所に入る時やアンジュレーションを渡る時には必ず走行速度を落としてください。
-
本機の車両感覚(車幅)をマスターしましょう。狭い場所での無理な通り抜けを避けましょう。ぶつけて破損するのは時間と費用のロスです。
マシンに接続する
Geolink Mow監視アプリを介してマシンに接続すると、マシンのプログラミング、モニター、リモート制御が可能になります。
-
マシンに接続するには、マシンのシリアル番号をURLに入力する。
URLの形式はtacs
.geolink.solutions。 -
myTurfの資格情報を使って、GeoLink Mow監視アプリにログインする。
Note: マシンに接続できない場合は、マシンがクラブの資産として在庫に追加されているかどうかを確認してください。myTurfソフトウェアガイドを参照してください。
自律作業のためのフェアウェイマッピング
マッピング要件
Note: マッピング機能の概要については、マップメニューを理解するを参照してください。
-
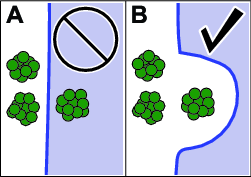
マシンとのGNSS通信が妨げられる可能性があるため、AOA境界を木やその他の障害物の下にマッピングしないでください (図 29)。
-
AOAとCMAは時計回りにマッピングする必要があります。ホールとNOAの場合は、反時計回りにマップします。
-
AOAまたはCMA境界をマッピングする際は、境界を直線上で開始および終了します。
-
マッピングプロセスを開始する前に、マシンが強力なGNSS信号を受信するようにしてください。マップページまたは診断メニューにある精度ステータスボックスを参照してください。
-
マッピング中またはマッピングの直前に、マシンを後退させないでください。マッピングを実行する前に、マッピングルートを慎重に検討してください。
| ポイント間 | 最小距離 |
| CMAとAOAまたはNOA間の距離 | 1.5 m |
| CMA幅 | 4.5 m |
Note: 最高のパフォーマンスを発揮には、AOAとCMA間の推奨距離は5 mです。これにより、マシンが効率的に旋回するのに十分なスペースが確保され、ミッションをより早く完了できるようになります。
マッピングプロセスの概要
自律での芝刈りコースを計画するには、以下の手順に従ってください。
-
自律作業領域 (AOA) をマップする。自律作業領域のマッピングを参照してください。
-
連続した草刈りエリア(CMA)をマップする。連続した刈り取り領域のマッピングを参照してください。
-
非作業領域(NOA、ホール、ポール)をマップする。非作業領域のマッピングとポールの作成を参照してください。
-
移動経路をマップする。移動経路のマッピングを参照してください。
-
ピックアップポイントを作成する。ピックアップポイントの作成を参照してください。
自律作業領域のマッピング
芝刈り機を自律運転モードで作業開始する前に、マッピングによって自律作業領域 (AOA) の境界をプログラムする必要があります。
Important: マッピングを行う前に、障害物をメモしておき、自律作業領域に障害物がないか、障害物に近すぎないかの観点で施設を点検します。自律作業領域には、マシンが検出できない、マシンを損傷する恐れがある、または安全上の危険を引き起こす可能性のある障害物が含まれていてはなりません。自律作業領域外のすべての物体または障害物が適切にマッピングされていることを確認するのは監督者の責任です。非作業領域のマッピングおよびポールの作成を参照してください。マシンと自律作業領域のあるサイトの安全基準に記載されている危険物との間に障害物(例:固い壁や通行不能な地形)が存在する場合は、AOAの境界が障害物から少なくとも2m離れるようにしてください。
Note: マシンの1つをコース全体のプライマリ マッピング マシンとして指定するこが推奨されます。これは、新しい領域のマップを作成したり、既存の領域のマップを変更したりする、フリート内の唯一のマシンになります。フリート内の他のマシンは、プライマリマッピングマシンによって作成されたマップファイルを利用します。正しいマップファイルがフリート内のすべてのマシンにロードされるようにするのは、監督者の責任です。
-
GeoLink芝刈り機監視アプリを使ってマシンに接続する。
-
ホーム画面から、右上隅にあるメニューボタンを押して、マップを選択する。
-
AOAのマッピングを開始する場所までマシンを移動する。
Note: 画面の右下にあるステータスボックス 精度とクリアランスの色に注意してください。色が赤の場合、マシンの位置特定精度が低いか、近くにある物体を検出していることを意味します。マシンはこの領域ではマッピングできないため、マシンを別の開始位置に移動して再試行してください。
Note: 灌漑フラッグやその他の特徴的な地形など、認識しやすいマーカーのある領域でAOAのマッピングを開始することを推奨します。
-
サイドバー メニューまたは展開可能な赤いボタンからAOAを選択し、次に外周を選択します。
-
左側のカッティングユニットの左前隅をマーカーとして使い、まずマシンを直線で運転し、次に時計回りにAOAの周囲をマッピングします。
マッピング中は、画面の右下にあるカラー ステータスボックス( 速度、精度、クリアランス)の色に注意してください。色が黄または赤の場合、マシンのの移動速度が速すぎるか、位置特定精度が低いか、近くにある物体を検出していることを意味します。マシンの速度を落とし、停止して待つか、別の場所に移動して再度マッピングを試みてください。
-
緑は、マシンが理想的なマッピングパラメータの範囲内にあることを意味します。
-
黄は、マシンがマッピングパラメータの制限に近づいていることを意味します。
-
赤は、マシンが境界をキャプチャしていない可能性があるか、位置特定精度が低いか、近くにある物体を検出していることを意味します。
-
-
AOAラインの始点に近づいたら、マシンの速度を落とし、保存を選択します。
-
ダイアログ画面ではいを選択します。
-
境界を保存するには、保存ボタンを選択します。
-
完了したAOAを表示するには、マップを更新します。
-
マッピングエラーがないか確認し、必要に応じて対処します。
連続した刈り取り領域のマッピング
-
連続刈り取り領域 (CMA) のマッピングを開始するAOA内の領域までマシンを移動します。
Note: 最適なパフォーマンスを得るには、CMA境界はAOA境界から少なくとも5 m離れている必要があります。これにより、自律作業時の旋回効率が向上します。最小距離要件についてはマッピング要件を参照してください。ただし、距離が短くなると旋回効率は低下し、ミッション時間は長くなります。
-
画面の右下にある赤いボタンを選択します。
-
メニューからCMAを選択し、次に外周を選択します。
-
左側のカッティングユニットの左前隅をマーカーとして使い、まずマシンを直線で運転し、次に時計回りにAOAの周囲をマッピングします。
Note: 画面の右下にあるカラー ステータスボックス( 速度、精度、クリアランス)の色に注意してください。色が黄または赤の場合、マシンのの移動速度が速すぎるか、位置特定精度が低いか、近くにある物体を検出していることを意味します。マシンの速度を落とし、停止して待つか、別の場所に移動して再度マッピングを試みてください。
-
緑は、マシンが理想的なマッピングパラメータの範囲内にあることを意味します。
-
黄は、マシンがマッピングパラメータの制限に近づいていることを意味します。
-
赤は、マシンが境界をキャプチャしていない可能性があるか、位置特定精度が低いか、近くにある物体を検出していることを意味します。
-
-
AOAラインの始点に近づいたら、マシンの速度を落とし、保存を選択します。
-
ダイアログ画面ではいを選択します。
-
境界を保存するには、保存ボタンを選択します。
-
フェアウェイD.O.P (プレイ方向) をマップします。
-
CMA内の任意の開始点までマシンを移動します。
-
D.O.Pを選択し、芝刈り機をプレイ方向に5 m運転します。
-
保存を選択します。
-
-
中心線をマップします:
-
フェアウェイの両端のCMA境界から1 m離れた地点までマシンを移動します。
-
中心線を選択し、フェアウェイの中央に沿ってマシンを移動します。
Note: フェアウェイの両端で中心線がCMAの1 m外側まで伸びていることを確認します。
-
マシンがCMAのもう一方の端を通過したら、保存を選択します。
-
-
マシンが通過できるが刈り取りは行わない領域を作成するには、ホールを選択し、その領域を反時計回りに走行してから保存を選択します。
-
作成したCMAを保存するには、もう一度保存を選択します。
-
マッピングエラーがないか確認し、必要に応じて対処します。
エラーを選択すると、エラーに関する追加情報とエラーの場所が表示されます。
非作業領域のマッピング
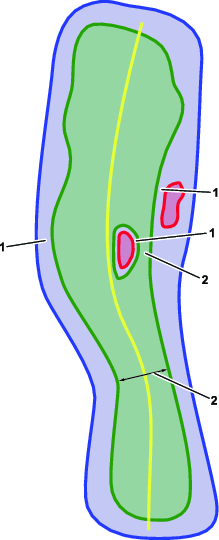
Important: 非作業領域は、木、バンカー、灌漑ボックス、頭上の障害物などの大きな物体や障害物、またはAOA内にあるワイヤーなどのマシンが検出できない小さな障害物をマッピングするために使われるものです。自律作業の前に、すべての物体または障害物が適切にマッピングされていることを確認するのは監督者の責任です。マッピング要件の要件に従ってください。NOAはCMA内で直接マッピングすることはできません。NOAをマッピングする前に、まずCMA内にホールを作成してください。
-
CMA内のホールの中に、マシンが通過できない領域を作成するには、ホールまで移動し、NOAを選択し、その領域を反時計回りに移動して、保存を選択します。
-
AOAの内側でCMAの外側に、マシンが通過できない領域を作成するには、CMAの外側の領域まで移動し、NOAを選択し、その領域を反時計回りに移動して、保存を選択します。
ポールの作成
Important: ポールは直径が1 m位の小さいNOAで、AOA領域内にある柱、排水溝、灌漑ボックスなどの小さな物体をマシンが通過するのを防ぎます。複数のポールを互いに近づけて作成し、バリアを形成することができます。
-
マップメニューから、ポールを選択します。
-
左側のカッティング ユニットの左前隅がマップする障害物に近づいたら、ポイントと保存を選択します。
ポールを表す赤い円が地図上に表示されます。
移動経路のマッピング
移動経路とは、芝刈り機が作業領域間を移動するときにたどる通り道のことです。ポールは直径が1低3.5 m必要です。
-
移動経路を開始するAOA内のポイントまでマシンを移動します。
Note: 移動経路は、CMA内を含むAOA内のどこからでも開始できますが、最適なパフォーマンスを得るには、AOA境界の近くから経路を開始することを推奨します。
-
マップメニューから、移動経路を選択します。
-
マップを作成する準備ができたら、移動経路を選択し、2つのAOA間でマシンがたどる正確なルートを辿ります。
-
マシンが他のAOA内に移動し、移動経路に問題がなければ、保存を選択します。
移動経路を表すオレンジ色の線が地図上に表示されます。
ピックアップポイントの作成
ピックアップポイントとは、芝刈り中にオペレーターがいつでもマシンを離れたり、ピックアップしたりできるAOA内の場所です。AOAはピックアップ ポイント専用に作成でき、移動経路を使ってフェアウェイに接続できます。オペレーターは監視アプリからいつでもマシンにこのポイントに戻るよう指示できます。
-
ピックアップポイントを作成するAOA内の場所までマシンを移動します。
-
ピックアップ、ポイント、保存を選択します。
ピックアップポイントは、左側のカッティングユニットの左前隅の位置に作成されます。
メニューを理解する

マップレイヤーの変更
-
マップメニューから、マップレイヤー ボタンを選択する。
概要、精度、およびオブジェクト検出のオプションが表示されます。
レイヤー 内容 サマリー 作業領域、移動経路、ピックアップポイント、ポールを表示する。また、顕著な精度と物体検出の問題も表示します。 正確さ マップされたエリアのGNSSおよびRTK精度を表示します。 物体検出 マシンがマップされた領域内にある近接物体を検出したかどうかを表示します。 -
表示したいマップ レイヤーを選択します。
マッピング後のマップの変更
マップメニューから、フェアウェイのCMA部分の任意のポイントを選択すると、フェアウェイと、プロパティ 、中央線、およびホールのウィンドウが開きます。
フェアウェイ名またはプレー方向の変更
-
プロパティウィンドウで、フェアウェイの名前またはプレイ方向の角度を変更します。
-
保存を選択します。
CMA中心線の平滑化または削除
スムーズ機能を使うと、タキシードスタイルのカットにおける中央のストライプの外観が向上します。中心線の経路を調整するには、中心線を削除して新しい中心線を作成します。
中心線ウィンドウで、スムーズまたは削除を選択します。
フェアウェイのマップエリアの削除
フェアウェイウィンドウで、マップされたフィーチャの横にあるゴミ箱アイコンを選択して、そのフィーチャを削除します。
Note: ミッションを開始する前に、これらの領域が再マッピングされ、エラーが修正されていることを確認してください。
ホールフィーチャの修正
-
ホールウィンドウで、マップされたホールを表示または削除します。
-
ホールを作成するには、+追加を選択します。
自律モードでのマシンの運転
ミッションの作成
ミッションはフェアウェイタスクの連続です。マシンが一つのミッションを完了すると、すぐに次のミッションを開始します。他にミッションが存在しない場合は、オペレーターから別の場所への移動を指示されない限り、マシンは最終フェアウェイの横に移動します。
-
GeoLink芝刈り機監視アプリを使ってマシンに接続する。
-
ホーム画面からミッションボタンを選択します。
-
+新しいミッションボタンを選択します。
-
マップされたCMAのリストの中から刈り取りを行いたいフェアウェイを選択します。
Note: フェアウェイを刈り取りたい順序でフェアウェイを選択します。
Note: ミッション内のすべてのCMAがAOAまたは移動経路を介して接続されるようにします
-
お気に入りから刈り取りパターンを選択するか、カスタム内で新しい刈り取りパターンを作成します。
-
スーパーバイザーの電話番号を入力し、保存ボタンを選択します。
Note: これにより、マシンが停止し管理者からの手動操作が必要な場合に、テキストメッセージアラートを送信できるようになります。
-
保存を選択します。
このステップで芝刈り機がアイドル状態の場合、芝刈り機はミッションを開始します。
Note: ミッションを保存すると、そのミッションはミッションの下に表示されます。
カスタム芝刈りパターンの作成
-
ミッションボタンを選択します。
-
新しいミッションを選択した後、芝刈りパターンの選択セクションでカスタムを選択します。
ストライプ、タキシード、クリーンアップの3つのパターンオプションが表示されます。
-
ストライプのオプションは次のとおりです:
オプション 定義 相対/絶対 マシンが基準点としてプレイ方向を使うか絶対角度を使うか 方向タイプ(-180~180または0~360) 上記で選択したオプションとの角度差。たとえば、相対を選択した場合、40と入力すると、マシンはプレイ方向から 40° (時計回り) の角度で刈り取りを行います。負の値を指定すると、マシンはプレイ方向に対して反時計回りの方向に刈り取ります。絶対角度40°の場合、マシンは真北から40°の角度で 刈り取ります。 複数ライン ストライプの幅を制御する。最大で5マシン幅まで対応可能 折り返し 刈り取りパスの方向を制御する クリーンナップ この設定をオンにすると、マシンはクリーンアップパスを実行する ターンを最適化 この設定をオンにすると、マシンは毎回の刈り取りパスの終わりに同様の大きさの旋回を行う -
タキシードのオプションは次のとおりです:
オプション 定義 方向 芝刈り機がフェアウェイを時計回りに刈り取るか反時計回りに刈り取るかを制御 クリーンナップ この設定をオンにすると、マシンにクリーンアップパスを実行させる -
クリーンアップのオプションは次のとおりです:
オプション 定義 方向 芝刈り機がクリーンアップパスを時計回りに実行するか反時計回りに実行するかを制御
-
-
監督者のモバイルデバイスの電話番号を入力し、保存を選択してミッションを保存します。
物体検出システムの検証
芝刈り機を自律モードで動作させる前に、物体検出システムが正しく機能しているかチェックする必要があります。
-
キーを差し込んで ON 位置に回す。
-
GeoLink芝刈り機監視アプリを使ってマシンに接続する。
-
診断ボタンを選択します。
-
オブジェクト検出を展開します。
-
マシンの各センサーの周りを歩き、物体検出リストにある対応する各センサーの円が
 画面上で赤くなっているようにします。
画面上で赤くなっているようにします。すべてのセンサーの完全な概要については、 製品の概要を参照してください。
-
マシンの前面から少し離れると、レーダーフィールドファーが黄色
 に変わります。
に変わります。 -
すべてのセンサーの機能を確認したら、マシンから離れてください。物体検出リストのすべての位置が緑
 に変わります。
に変わります。
システムインジケーター
| カラー | 意味 |
 | デバイスに接続されていません。 |
 | システムはデータを送信していません。 |
| システムのパフォーマンスは良好であるか、マシンが近くの障害物を検出していません。 |
| システムのパフォーマンスが低いか、マシンが近くの障害物を検出していますが、マシンは動作可能です。 |
| システムがマシンの動作を妨げています。障害のある部分を検査し、問題を修正するか、マシンを別の場所に移動してください。 |
自律モードを有効にする
-
駐車ブレーキを解除する。
-
機能制御スイッチを芝刈りに設定する
-
アクティブなマシン障害を解決します。
-
運転席を離れ、マシンの後部に移動し、芝刈りの危険区域から離れるようにしてください。
-
自律/手動モードスイッチを自律モード側に2秒間押し続けます。
-
自律ステータスライトが緑色に点灯し、マシンが2回ビープ音を鳴らすまで待ちます。これは、自律モードがアクティブであることを示します。
監視アプリを使ってマシンを操作できるようになりました。
ミッションの実行
-
すべてのセンサーが正常に機能するようにします。物体検出システムの検証を参照してください。
-
マシンをAOAに移動する
-
自律モードを有効します。自律モードを有効にするにある以下の手順に従ってください。
-
監視アプリのダッシュボードメニューから、Goボタンを選択します。
Important: フェアウェイで初めてミッションを実行する場合は、他のタスクに注意を向ける前に、マシンを観察して、ミッションに従うようにしてください。
-
ポップアップの同意を受け入れてミッションを開始します。
ミッションのモニタリング
-
ミッションボタンを選択します。作成されたミッションがページに表示されます。
アクティブミッションには、砂時計のタイマーとミッション情報の概要が表示されます。
-
ページ上のミッションの1つを選択します。選択されたミッションに関する追加情報が表示されます。
ディスプレイ 意味 ミッション# ミッションの番号を表示します。 状態 ダッシュボード—ミッションの状態を参照。 開始時間 ミッションが開始された時間 終了時間 ミッションの完了予定時間 刈り取られたエリア これまでにマシンが刈った総面積 カバーした距離 マシンがこれまで移動した距離 作業時間 現在のミッションがアクティブになっている時間 進捗 ミッションの完了率を表示 パターン 現在のミッションのパターンの名前を表示 プロパティ 選択した刈り取りパターンのプロパティを表示。カスタム芝刈りパターンの作成を参照してください。
物体検出による停止を理解する
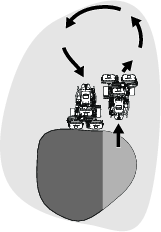
マシンのセンサーが障害物を検知し、作動すると自動的にマシンの速度を落としたり停止したりします。マシンは、非ハザードゾーン、ハザードゾーン、窪地検出の3つのゾーンをモニターします。

| 図 33 記号 | 対策 |
| A | 8 m |
| B | 3 m |
マシンが非ハザードゾーン内に静止物体を感知すると、マシンは減速を開始し、オレンジ色のライトが高速で点滅し始めます。マシンが物体に近づき、その物体がハザードゾーンのすぐ外側にあると、マシンはアイドリングを開始し、PTOが解除され、1分後にマシンから監督者のモバイルデバイスにテキストが送信されます。監督者が物体を除去した後、モバイルデバイスを使ってリモートでミッションを再開できます。
マシンがハザードゾーン内で物体を突然感知すると、マシンは直ちに停止し、PTOが解除され、エンジンが停止し、マシンは駐車状態になり、管理者にテキストが送信されます。その後、監督者は物体を取り除き、手動で自律/手動モードスイッチを切り替えてミッションを再開する必要があります。
窪地検出は、マシンが危険な窪地に遭遇したかどうかを検出します。マシンが危険な地形に遭遇すると、直ちに駐車状態になり、管理者にテキストが送信されます。監督者は手動でマシンを安全な場所まで移動し、手動で自律/手動モードスイッチを切り替えてミッションを再開する必要があります。
Important: 障害物が監督者によって適切にマッピングされている場合、窪地検出システムを作動させる必要はありません。テストミッションを実行して、窪地に関する問題を確認します。マシンが窪地のあるエリアを回避するように、新しいAOA、CMA、またはNOAを作成します。
マップデータの保存とエクスポート
監視アプリには、フリート内のマシン間でマップファイルをエクスポートして共有する機能があります。
Important: マシンの1つをコースのプライマリ マッピング マシンとして指定するこが推奨されます。これは、新しい領域のマップを作成したり、既存の領域のマップを変更したりする、フリート内の唯一のマシンになります。正しいマップファイルがフリート内のすべてのマシンにロードされるようにするのは、監督者の責任です。
-
プライマリマッピングマシンのキーを挿入し、オンの位置に回します。2分間待機します。
-
GeoLink芝刈り機監視アプリを使ってマシンに接続する。
-
上部のメニューバーから、ヘルプボタンを選択します。
-
マップ データベースのエクスポートボタンを選択して、マップファイルのコピーを作成してダウンロードします。
これにより、マップファイルのコピーがデバイスのダウンロードディレクトリに保存されます。
-
マップファイルをフリート内の他のマシンにインポートします。
-
プライマリ以外の各マシンにキーを挿入し、オンの位置に回します。
-
GeoLink Mow監視アプリを使って各マシンに接続します。
-
上部のメニューバーから、設定ボタンを選択します。
-
マップのロックをオフにします。
-
上部のメニューバーから、ヘルプボタンを選択します。
-
すべてのマップデータを削除ボタンを選択します。
Note: ボタンを選択する前に、アクティブなミッションがないようにしてください。
-
ファイルの選択ボタンを選択し、先ほどデバイスにダウンロードしたファイルを開きます。
-
マップ データベースのインポートボタンを選択します。
-
設定メニューで、マップをロックをオンにします。
-
フリート内の他のすべてのマシンに対してこれらの手順を繰り返します。
-
ループバックコネクタを使った自律制御システムのバイパス
自律制御システムが利用できない、または正常に機能していない場合は、マシンを手動で操作するためにシステムをバイパスする必要がある場合があります。
-
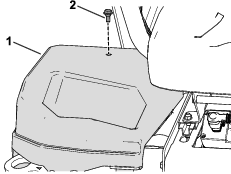
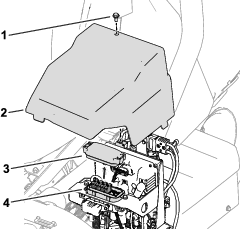
電気系統の右側カバーを取り外します。12V システム用のバッテリーの搭載位置を参照してください。
-
メインマシンのワイヤーハーネス上にあるコネクタを見つけて、ループバックコネクタを接続します。
グリーンを手動で芝刈りする
実際にグリーンで刈り込みを行う前に、広い場所で基本的な運転操作(走行、停止、カッティングユニットの上昇、下降、旋回動作など)をよく練習してください。
グリーンにゴミがないか点検し、芝刈り中にカッティングユニットを損傷する可能性のあるものはすべて取り除き、カップからフラグを外して、芝刈りに最適な方向を決定します。刈り込みの方向は、前回の刈り込みの方向をもとにして決めます。いつも前回とは違う方向から刈るようにすると、芝が一定方向に寝てしまわないのできれいに刈ることができます。
グリーンを刈り込む
-
グリーンの一方の縁から刈り始め、細長いじゅうたんを敷くつもりで真っ直ぐに進んでください。
Note: このパターンで作業すると、無駄な重なりをなくし、固結を最小限に抑えながら、美しい縞模様を作ることができます。
-
機能コントロールスイッチを 刈り込み にする。
-
刈り取りユニットの前端がグリーンの外側の端を横切るように、刈り取り昇降レバーを前方に押します。
Note: これによりカッティングユニットが芝面に下降しリールが回転を始めます。
Important: 中央ユニットはやや遅れて動作を開始しますので、練習によってこのタイミングを早くつかんで、外周部分への削り込みをなくし、仕上げ刈りの手間を最小限にしましょう。中央ユニットの動作の遅れは走行速度によって決まります。走行速度が遅い場合には遅れ時間が長くなり、速いと短くなります。マシンは走行速度をモニターしてこの遅れ時間を調整し、全部のユニットが一直線上に降りるようにしています。
-
行きと帰りでのオーバーラップができるだけ小さくなるように運転します。
Note: グリーン内をぶれずにきれいに直進し、刈り込みの済んだ列との距離を一定に保って走るためには、車体前方 1.8 から 3 m のところに視線を置いて、刈り込み済みの済んでいる列にラインを合わせるようにするのがコツです(図 36)。ハンドルを目印にして距離を合わせても良いでしょう。その場合、ハンドルの縁と本機前方の目標ラインとを重ねて見ながら運転します。
-
集草バスケットの先端がグリーンの縁に掛かったところで昇降ジョイスティックを軽く引いて、全部のカッティングユニットが上昇するまで保持します。これによりリールの回転は停止し、カッティングユニットが上昇します。
Important: このタイミングを間違うとグリーンのエッジ部分を刈り込んでしまいます。またカッティングユニットを降ろすタイミングが遅いと外周近くに刈り残しを作ってしまいます。タイミングを早くつかんでください。
-
U ターンするとき、一旦反対側にハンドルを切ってから旋回すると、楽に、しかも効率良く回ることができて次の列そろえが楽になります。反対側に軽く振ってから旋回すると雨だれ形の旋回(図 35)になって、スムーズに次の列に入ることができます。
Note: スロー・イン・ターン機能が ON の場合には、旋回中は自動的に減速しますので走行ペダルを操作する必要はありません。
Note: できるだけ小さな半径でターンをする方が刈り込みを能率よく行うことができますが、芝草が弱っている時などは大きな半径で優しく回ってください。
Important: 絶対にグリーンの上に停止してはいけません。特に、カッティングユニットを作動させたままで停止するとターフが損傷します。グリーンの上で停止するとタイヤ跡が残ることがあります。
外周刈りと仕上げ
-
最後にグリーンの外周を刈ります。これも前回と反対の方向から刈るようにしましょう。
刈り込んだ後の見映えをより良くしたり、いわゆる外周リングを目立たなくする方法については外周刈りと仕上げを参照してください。
Note: 常に天候や芝状態を考慮すること、毎回刈り込みの方向を変えることが大切です。
-
外周刈りが終わったら、タップオフ遅延が ON の場合には昇降ジョイスティックを軽く後ろに引いて、そのままグリーンから出てください。全部のカッティングユニットがグリーンの外に出たら、昇降ジョイスティックを後ろに引いてカッティングユニットを上昇させます。
Note: このようにすれば、グリーンの上に刈りかすがこぼれ落ちません。
-
旗を戻して終了です。
運転終了後に
刈り込み作業後の点検と清掃
| 整備間隔 | 整備手順 |
|---|---|
| 使用するごとまたは毎日 |
|
芝刈り作業が終わったら、ホースと水道水で洗車をしますが、水圧が高いとシールやベアリングや電気機器に浸水しますからノズルは使用しないでください。高温のエンジンや、配線部分には水を掛けないでください。
Important: 塩分を含んだ水や処理水は機体の洗浄に使用しないでください。
Important: 圧力洗浄機でマシンを洗浄しないでください。高圧の水で洗浄すると電気系統の損傷、重要なデカルのはがれ、グリス部への水の浸入などを起こす恐れがあります。シールの裏側に水が入るとハウジング内部のオイルやグリスが汚染されてしまいます。コントロールパネル、エンジン、バッテリーの周囲に大量の水を掛けないでください。
Important: 洗浄はエンジンを止めて行ってください。エンジンを掛けたままで洗浄を行うとエンジン内部に損傷を起こす恐れがあります。
Important: マフラー内部に無理に水を入れないでください。マフラー内部に水が入るとエンジン内部を損傷したりエンジンの性能を低下させるなどの悪影響が出る恐れがあります。
機体の洗浄が終了したら、カッティングユニットの切れ味をチェックしてください。
トレーラへの積み込み
-
トレーラやトラックに芝刈り機を積み降ろすときには安全に十分注意してください。
-
積み込みには、機体と同じ幅のある歩み板を使用してください。
-
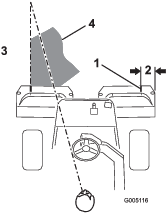
荷台に載せたら、ストラップ、チェーン、ケーブル、ロープなどで機体を確実に固定してください。機体の前後に取り付けた固定ロープは、どちらも、機体を外側に引っ張るように配置してください (図 37)。
-
搬送のための固定が終了したら、燃料バルブを閉じてください。
緊急時の牽引について
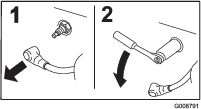
Note: 手順については図 38を参照。
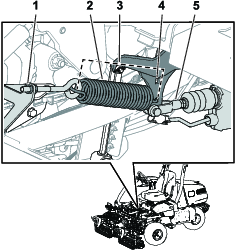
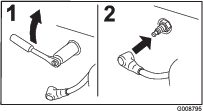
マシンを牽引する場合には、以下の要領でブレーキアクチュエータを解除することが必要です:
-
駐車ブレーキを掛ける。
-
キーを抜き取り、主電源コネクタを外す。
Important: 主電源コネクタを外さずに牽引すると電気系統を損傷する恐れがあります。
-
燃料バルブを閉じる。
-
左右の前輪に輪止めを掛ける。
-
アイボルトをスプリングブラケットに固定しているナットをゆるめてスプリングのテンションを解除する。
-
スプリングを外す。
-
アームブラケットの穴にラチェット(⅜")を入れてアクチュエータシャフトを押し込む。
危険
アクチュエータがブレーキから外れると、マシンはブレーキを解放した状態となって自由に転がる。マシンが勝手に動き出して人に当たるなどすると人身事故になる危険がある。
牽引中以外には、必ず駐車ブレーキを掛けること。
-
駐車ブレーキを掛ける。
-
タイヤの輪止めを取り外す。
-
3 WD キット搭載マシンでは、キットのワイヤハーネスをメインのワイヤハーネスから外す。
Important: キットのハーネスメインのハーネスを外さずに牽引すると電気系統を損傷する恐れがあります。
-
牽引準備が整ったら駐車ブレーキを解除する。
-
牽引中にブレーキでマシンの制御を行えるように、一人がマシンの運転席に座ってシートベルトを着用する。
Note: これにより、登り斜面や下り斜面でマシンを確実に制御することができます。
-
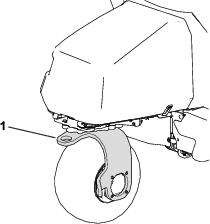
マシンの後キャスタフォークに牽引ロープを取り付けて牽引する(図 39)。
Important: 牽引速度は 5 km/h 以内としてください。この速度を超えると電気系統を損傷する恐れがあります。
目的地まで牽引したら、以下の作業を行ってください:
-
駐車ブレーキを掛ける。
-
キャスタフォークから牽引ロープなどを外す。
-
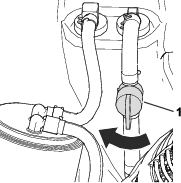
アイボルトのナットを締め付けてスプリングの長さ(取り付けた状態)を 11.4 cm にする(図 38)。
エンジンを使用せずにマシンを運転する場合
マシンに搭載されているバッテリーのみでの運転が可能です。例えば以下のような場合に利用するとよいでしょう:
-
整備場内でのマシンの移動。
-
刈り込み中に万一エンジンが停止した場合にグリーンの外に出る。
エンジン無しでの刈り込みはできません;移動走行のみ可能です。この機能が利用できるのは 1 分間限りですが、キーを入れ直せば繰り返し利用することができます。
-
運転席に座ってシートベルトを締める。
-
キーを ON 位置に回す。
-
機能コントロールスイッチを 刈り込みまたは移動走行位置にする。
-
駐車ブレーキを解除する。
-
走行ペダルを踏むと走行できる。
Note: 前進速度は 4.8 km/h に、後退速度は 4.0 km/h に制限されます。
Important: この機能を使いすぎるとバッテリーの寿命が短くなりますのでご注意ください。
保守
推奨される定期整備作業
| 整備間隔 | 整備手順 |
|---|---|
| 使用開始後最初の 8 時間 |
|
| 使用開始後最初の 50 時間 |
|
| 使用するごとまたは毎日 |
|
| 25運転時間ごと |
|
| 50運転時間ごと |
|
| 100運転時間ごと |
|
| 200運転時間ごと |
|
| 800運転時間ごと |
|
| 1000運転時間ごと |
|
| 2年ごと |
|
始業点検表
このページをコピーして使ってください。
| 点検項目 | 第 週 | ||||||
|---|---|---|---|---|---|---|---|
| 月 | 火 | 水 | 木 | 金 | 土 | 日 | |
| インタロックの動作を点検する。 | |||||||
| 計器類の動作を確認する。 | |||||||
| ブレーキの動作を確認する。 | |||||||
| エンジンオイルの量を点検する。 | |||||||
| 燃料残量を確認する。 | |||||||
| エンジン冷却フィンの汚れを落とす。 | |||||||
| エアフィルタとプレクリーナを点検する。 | |||||||
| エンジンからの異常音がないか点検する。 | |||||||
| タイヤ空気圧を点検する。 | |||||||
| リールとベッドナイフの刃合わせを点検する。 | |||||||
| 刈高の調整具合を点検する。 | |||||||
| 塗装傷のタッチアップ修理を行う。 | |||||||
| センサーとセンサーブラケットを点検する。 | |||||||
| マシンを洗浄する。 | |||||||
| 要注意個所の記録 | ||
| 点検担当者名: | ||
| 内容 | 日付 | 記事 |
整備前に行う作業
車体をジャッキで持ち上げる場合
エンジンの整備
エアクリーナの整備
| 整備間隔 | 整備手順 |
|---|---|
| 25運転時間ごと |
|
| 100運転時間ごと |
|
| 200運転時間ごと |
|
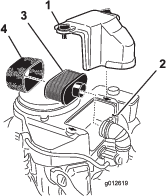
スポンジおよびペーパーエレメントを点検し、破損しちたり汚れがひどければ交換します。
Important: スポンジやペーパーエレメントはオイルでぬらさないでください。
スポンジエレメントとペーパーエレメントの取り外し
エアクリーナのスポンジエレメントの洗浄
-
スポンジを温水と液体洗剤で洗う。汚れが落ちたら十分にすすぐ。
-
洗い上がったら、きれいなウェスにはさんで水分を取る。
Important: スポンジエレメントはねじらないでください。破れます。スポンジが破れたり薄くなっている場合には交換してください。
エアクリーナのペーパーエレメントの整備
-
ペーパーエレメントを軽くたたいて、たまっているほこりを落とす。汚れがひどい場合には、新しいペーパーエレメントに交換する(図 43)。
-
破れや油汚れ、ゴムシールの傷がないか点検する。
-
スプリングが破損しているペーパーエレメントは交換する。
Important: ペーパーエレメントを洗わないでください。
エンジンオイルについて
エンジンにはオイルを入れて出荷していますが、初回運転の前後に必ずエンジンオイルの量を確認してください。
エンジンオイルの仕様
API 規格:SJ またはそれ以上
オイルの粘度:SAE 30
Note: 高品質のエンジンオイルを使用してください。
エンジンオイルを点検する
| 整備間隔 | 整備手順 |
|---|---|
| 使用するごとまたは毎日 |
|
注意
エンジンは運転中に高温になる。
整備作業やオイル量の点検などはエンジンが冷えてから行うこと。
手順については図 44を参照。
-
平らな場所に駐車し、カッティングユニットを降下させ、駐車ブレーキを掛け、エンジンを停止させてキーを抜き取る。
-
ディップスティックを回して抜き、ウェスで一度きれいに拭く。
-
ディップスティックチューブにディップスティックを取り付ける。
-
チューブからもう一度引き抜いて油量を点検する。
-
オイルの量が不足している場合は、ディップスティックの FULL マークまで、ディップスティックチューブからオイルを補給する。
補給するときは、ディップスティックで確認しながら少量ずつ入れる。
Important: 入れすぎないように注意してください。
-
ディップスティックを元通りに取り付ける。

エンジンオイルとフィルタの交換
| 整備間隔 | 整備手順 |
|---|---|
| 使用開始後最初の 8 時間 |
|
| 100運転時間ごと |
|
注意
エンジンは運転中に高温になる。
オイルやフィルタの交換はエンジンが冷えてから行うこと。
エンジンオイル容量: 1.7 リットル(フィルタを含む)
-
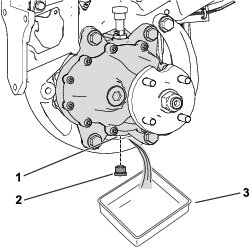
ドレンプラグ (図 45) を外してオイルを容器に受ける。
-
ドレンプラグのねじ山をきれいにしてドレンプラグを取り付ける(図 45)。
-
オイルフィルタ(図 46)を外す。
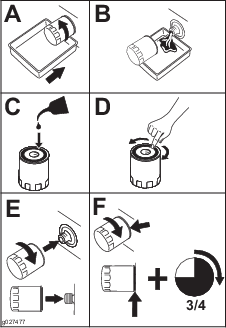
-
新しいフィルタのガスケットに薄くエンジンオイルを塗る。
-
ガスケットがアダプタに当たるまで手でねじ込み、そこから更に ¾-1 回転増し締めする。締めすぎないように注意してください。
-
クランクケースにオイルを入れる;エンジンオイルを点検するを参照。
-
廃油は適切な方法で処理する。
点火プラグの整備
| 整備間隔 | 整備手順 |
|---|---|
| 100運転時間ごと |
|
注意
エンジンは運転中に高温になる。
点火プラグの点検などの整備はエンジンが冷えてから行うこと。
取り付ける時には電極間のエアギャップを正しく調整しておいてください。取り付け、取り外しには必ず専用のレンチを使い、エアギャップの点検調整にはすきまゲージやギャップ調整工具などを使ってください。必要に応じて新しい点火プラグと交換してください。
点火プラグのタイプ: NGK® BPR4ES または同等品
エアギャップ:0.75 mm
点火プラグの取り外し
-
平らな場所に駐車し、カッティングユニットを降下させ、駐車ブレーキを掛ける。
-
エンジンを止め、キーを抜き取る。
-
点火プラグのキャップを探し出す。
-
点火プラグを外した時にエンジン内部に異物が落ちないように、プラグキャップの周囲をきれいに清掃する。
-
点火プラグキャップをプラグから外す(図 47)。
-
エンジンから点火プラグを外す。
点火プラグの点検と清掃
Important: 黒い汚れ、電極の磨耗、油膜、亀裂などがあれば新しいものと交換してください。
-
ワイヤブラシで点火プラグに付着しているカーボンを除去する。
キャブレタークリーナで点火プラグについている異物を十分に除去する。
-
点火プラグに割れ、電極の摩耗、黒い被覆物、オイルの膜などが残っていないか点検する。
-
必要に応じて点火プラグを交換する。交換する場合は、不良プラグが 1 本のみであっても全プラグを交換すること。
-
点火プラグのすきまを点検し、必要に応じて調整する。すきまを調整する場合には、調整工具を使用し側面電極のみを曲げること。
すきまを 0.75 mm に調整する。
絶縁体部がうす茶色や灰色なら適正、碍子が黒くなっているのは不完全燃焼である(エアクリーナの汚れが原因であることが多い)。
点火プラグの取り付け
手順については図 49を参照。
-
エンジンに点火プラグを取り付ける。
-
点火プラグを 22 N·m(2.21 kg.m = 16 ft-lb)にトルク締めする。
-
点火プラグのキャップを元通りに取り付ける。
燃料系統の整備
燃料フィルタの交換
| 整備間隔 | 整備手順 |
|---|---|
| 1000運転時間ごと |
|
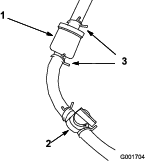
インライン燃料フィルタは燃料バルブとエンジンの間にあります。
危険
燃料は非常に引火・爆発しやすい物質である。発火したり爆発したりすると、やけどや火災などを引き起こす。
-
燃料タンクからの燃料の抜き取りはエンジンが冷えてから行う。この作業は必ず屋外の広い場所で行う。こぼれた燃料はふき取る。
-
燃料取り扱い中は禁煙を厳守し、火花や炎を絶対に近づけない。
燃料ラインとその接続の点検
| 整備間隔 | 整備手順 |
|---|---|
| 2年ごと |
|
劣化・破損状況やゆるみが発生していないかを調べてください。
電気系統の整備
マシンへの電源の接続と切断
マシンには、バッテリーから主電源コネクタを経由して電源が供給されます。コネクタを外せば電源供給が停止され、接続すれば供給が始まります。主電源コネクタを参照。
12V システム用 12V バッテリーの充電
警告
バッテリーケーブルの接続手順が不適切であるとケーブルがショートを起こして火花が発生する。それによって水素ガスが爆発を起こし人身事故に至る恐れがある。
-
ケーブルを取り外す時は、必ずマイナス(黒)ケーブルから取り外す。
-
ケーブルを取り付ける時は、必ずプラス(赤)ケーブルから取り付け、それからマイナス(黒)ケーブルを取り付ける。
12V AGM(ガラス繊維マット)バッテリー(図 51)は、インフォセンター、ブレーキのアクチュエータ、マシンのコントローラ、および CAN 分離モジュールの電源です。

-
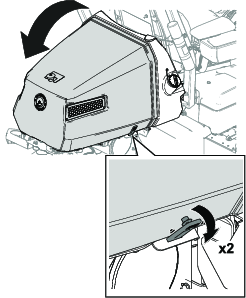
右側カバーを取り外す
-
バッテリーカバーを取り外す。
-
バッテリー端子からバッテリーケーブルを外す。
-
バッテリー端子にチャージャを接続して充電する。
充電に際しては以下の点に注意する:
-
コネクタ同士が接触したり、マシンのフレームに触れたりしないように注意する。コネクタは小さいものを使用する方が安全である。
-
AGM バッテリー用の充電モードのあるチャージャを使うのが望ましい。
-
最大充電電流:2.4 A
-
最大充電電圧:14.3 V
-
-
充電が終了したら、バッテリーの端子にケーブルを元通りに接続する。
-
バッテリーにバッテリーカバーを取り付ける。
-
右側カバーを取り付ける
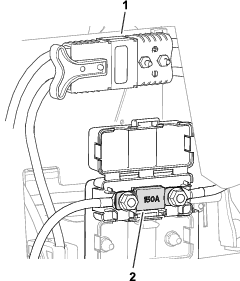
48V バッテリーシステムについて
Important: 48V バッテリーシステムの充電はお奨めできません。
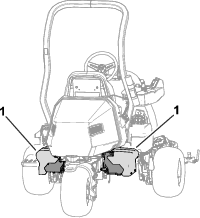
48V バッテリーシステムは、4 本のバッテリー(12V, AGM(ガラス繊維マット)で構成されています。バッテリーは、機体左右のカバーの下にあります;図 52を参照。48 V は、走行車輪、カッティングユニット駆動モータ、ステアリングモータ、昇降アクチュエータの電源です。
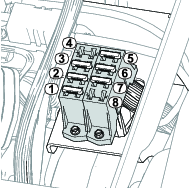
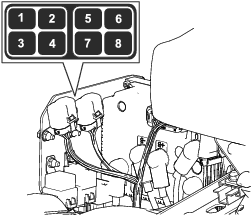
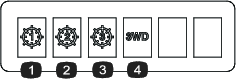
ヒューズの搭載位置

走行系統の整備
タイヤ空気圧を点検する
| 整備間隔 | 整備手順 |
|---|---|
| 使用するごとまたは毎日 |
|
タイヤ空気圧はターフのコンディションに合わせて適宜変えてください:適正範囲の最低値は 0.83 bar、最高値は 1.10 barです。
Important: タイヤ空気圧は3輪とも同じに調整してください。3輪とも同じでないと適切な性能を発揮することができません。
ホイールナットのトルクを点検する
| 整備間隔 | 整備手順 |
|---|---|
| 使用開始後最初の 8 時間 |
|
| 200運転時間ごと |
|
警告
適切なトルク締めを怠ると車輪の脱落や破損から人身事故につながる恐れがあります。
各ホイールナットを所定のトルクに適切な締め付け順序を守って締め付ける。
ホイールナットの規定トルク:108-122 N·m(9.7-12.5 kg.m = 80-90 ft-lb)
均等な締め付けになるように図 63に示すパターンで少しずつ締め付けてください。

走行モータのギアボックスのオイル交換
| 整備間隔 | 整備手順 |
|---|---|
| 使用開始後最初の 8 時間 |
|
| 800運転時間ごと |
|
オイルの仕様: SAE 80W90
ギアボックスの容量: 約 384 ml
-
車体をジャッキで持ち上げる;車体をジャッキで持ち上げる場合を参照。
Important: ギアボックスに適正量のオイルを入れるためには機体が水平であることが必要です。ジャッキスタンドで機体を水平に支持してください。
-
以下の要領で左右のタイヤを外します:
-
ホイールラグナットをゆるめて外す(図 64)。
-
左右のタイヤを外す。
-
-
ホイールモータアセンブリ下にオイルを受ける容器を置く(図 65)。
-
ドレンポートからプラグを外す(図 65)。
Note: ドレンポートはギアボックスの底部にあります。
Note: オイルが完全に抜けるまで待ってください。
-
プラグをきれいに拭く。
-
ドレンポートにドレンプラグを取り付ける(図 65)。
-
ギアボックス上部から換気ホースとフィッティングを外す(図 66)。
-
給油ポートから所定のオイルを 384 ml 入れる。
-
給油ポートに換気ホースとフィッティングを取り付ける(図 66)。
-
以下の要領でタイヤを取り付ける:
-
左右のホイールハブにタイヤを取り付ける。
-
ホイールラグナットを取り付ける(図 64)。
-
各ラグナットをホイールナットのトルクを点検するに表示されている所定のトルクにトルク締めする。
-
ブレーキの整備
ブレーキの調整
駐車中にブレーキが十分に利かずに車両が動いてしまう場合には、調整してください;さらに詳しいことについては弊社代理店に問い合わせるか サービスマニュアル を参照してください。
カッティングユニットの保守
刈り込みブレードについての安全事項
磨耗したり破損したりしたリール刃や下刃は使用中に割れて破片が飛び出す場合があり、これが起こるとオペレータや周囲の人間に多大の危険を及ぼし、最悪の場合には死亡事故となる。
-
リール刃や下刃が磨耗や破損していないか定期的に点検すること。
-
刃を点検する時には安全に十分注意してください。必ず手袋を着用してください。リールと下刃は研磨するか交換するかのみ行い、たたいて修復したり溶接したりしないでください。
-
複数のカッティングユニットを持つ機械では、1つのリールを回転させると他のカッティングユニットのリールも回転する場合がありますから注意してください。
カッティングユニットの取り付けと取り外し
Note: カッティングユニットが機体から外した場合には、そのカッティングユニットのリールモータを、サスペンションアームの前部にある一時保管位置にセットしておくと、誤って破損させるなどの事故を防止することができます。
Important: リールモータをホルダー(フレーム)に入れたままでサスペンションを「移動走行」位置にしないでください。モータやホースが破損する恐れがあります。
Important: ベッドナイフやリールを見るためにカッティングユニットを立てる場合には、ベッドバー調整ねじのナットが床面に接触しないように、カッティングユニットの後ろ側をスタンドなどで支えてください(図 67)。
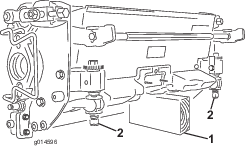
カッティングユニットを取り付ける
注意
高温のエンジンやマフラーに触れると大やけどを負う。
カッティングユニットの取り付けはエンジンやマフラーが十分冷えている状態で行うこと。
カッティングユニットを取り付けるためには、サスペンションを下げる必要があります。サスペンションは以下の要領で下げます:
-
よごれのない平らな場所に駐車する。
-
機能コントロールスイッチを ニュートラル にする。
-
エンジンを始動させるか、キーを ON 位置に回す。
-
昇降ジョイスティックでサスペンションを下げる。
-
駐車ブレーキを掛け、エンジンを停止させ、キーを抜き取る。
カッティングユニットの取り付けは以下の要領で行います:
-
主電源コネクタを外す;主電源コネクタを参照。
注意
マシンへの給電遮断をしないと、誰でもいつでもカッティングユニットを始動させることができ、手や足に大怪我を負う危険がある。
カッティングユニットの整備などを行う際には、必ずその前に、主電源コネクタ部で電源を遮断すること。
-
中央サスペンションアームの下にカッティングユニットを置く。
-
サスペンションアームのバーについているラッチ(図 68)を開き、サスペンションアームを押し下げてバーをカッティングユニットの両方のピッチアームの上におろし、ラッチがカッティングユニットのクロスバーの下にくるようにする(図 69)。
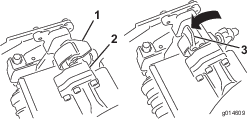
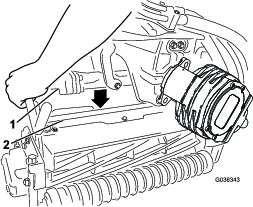
-
ラッチを下げて閉じるとカッティングユニットのバーがロックされてユニットがアームにセットされる(図 68)。
Note: ラッチが正しくロックされると、「カチッ」という音が聞こえ手ごたえが感じられます。
-
カッティングユニット用モータのスプラインシャフトにきれいなグリスを塗りつける(図 70)。
-
モータを、カッティングユニットの左側(運転席から見て)に取り付け、カッティングユニットについているモータ固定バーを、モータの上から被せるようにセットし、モータの左右から「カチッ」というロック音が聞こえるまで押し下げる(図 70)。
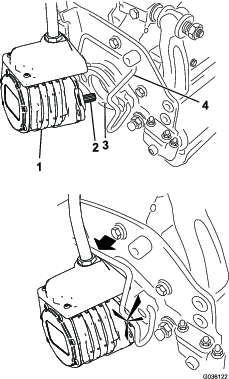
-
残りのカッティングユニットにも同作業を行う。
-
主電源コネクタを接続する;主電源コネクタを参照。
カッティングユニットを取り外す
注意
高温のエンジンやマフラーに触れると大やけどを負う。
カッティングユニットの取り付けはエンジンやマフラーが十分冷えている状態で行うこと。
-
汚れのない平らな場所に駐車し、機能コントロールスイッチをニュートラルにし、昇降ジョイスティックを操作してカッティングユニットを降下させる。
-
駐車ブレーキを掛け、エンジンを停止させ、キーを抜き取る。
-
主電源コネクタを外す;主電源コネクタを参照。
注意
マシンへの給電遮断をしないと、誰でもいつでもカッティングユニットを始動させることができ、手や足に大怪我を負う危険がある。
カッティングユニットの整備などを行う際には、必ずその前に、主電源コネクタ部で電源を遮断すること。
-
リールモータのスロットに嵌っているモータ固定バーを、スロットからカッティングユニット側に押し出すようにして外し、モータを取り外す。
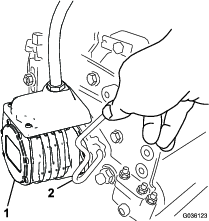
-
外したモータは、サスペンションアームの前部にある一時保管位置にセットしておく(図 72)。
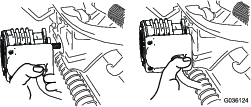
Note: カッティングユニットの整備(研磨、刈高調整など)を行う場合には、そのカッティングユニットのリールモータを、サスペンションアームの前部にある一時保管位置にセットしておくと、誤って破損させるなどの事故を防止することができます。
Important: リールモータをホルダー(保管位置)に入れたままでサスペンションを「移動走行」位置にしないでください。モータやホースが破損する恐れがあります。カッティングユニットを取り付けない状態でトラクションユニットを移動させなければならない場合には、ケーブルタイでモータを固定してください。
-
取り外したいカッティングユニットのサスペンションアームのバーについているラッチを開く(図 68)。
-
カッティングユニットのバーからラッチを外す。
-
サスペンションアームの下からカッティングユニットを引き出す。
-
必要に応じて、残りのカッティングユニットにも4から8までの作業を行う。
-
主電源コネクタを接続する;主電源コネクタを参照。
リールとベッドナイフの摺り合わせを点検する
| 整備間隔 | 整備手順 |
|---|---|
| 使用するごとまたは毎日 |
|
前日の調子に関係なく、毎日、芝刈り作業を行う前に、各カッティングユニットのリールとベッドナイフの接触状態を点検してください。リールと下刃の全長にわたって軽い接触があれば適正です。カッティングユニットのオペレーターズマニュアルを参照。
リールを点検する前に、主電源コネクタを外してください。主電源コネクタを参照してください。作業終了後には接続してください。
カッティングユニットのバックラップ
警告
ベッドナイフ、リール、その他の可動部に触れると大けがをする。
-
リールその他の可動部に手指、足、衣類等を近づけないよう注意すること。
-
エンジンが動いている間は、止まったリールを絶対に手や足で回そうとしないこと。
-
平らな場所に駐車し、カッティングユニットを降下させ、機能コントロールスイッチをニュートラル位置にし、駐車ブレーキを掛け、エンジンを停止させてキーを抜き取る。
-
各カッティングユニットのリールと下刃をバックラップ用に設定する;カッティングユニットのオペレーターズマニュアルを参照。
-
キーを差し込んでエンジンを始動する。
-
インフォセンターを操作し整備(SERVICE)メニュー画面からバックラップ(BACKLAP)を選択する。
-
BACKLAP を ONにする。
-
メインメニューから下へスクロールして設定(Settings)へ行く。
-
SETTINGS から下へスクロールして BACKLAP RPM へいき、±ボタンを使用して希望する数値に設定する。
-
機能コントロールスイッチをニュートラル位置にして、昇降ジョイスティックを前に倒すとリールが回転してバックラップが始まる。
-
長い柄のブラシを使ってラッピングコンパウンドを塗布しながらラッピングを続ける。柄の短いブラシは絶対に使用しないこと。
-
リールの回転が止まってしまったり、回転が一定しない場合には、安定する速度までバックラップ速度を少しずつ上げていく。
-
バックラップ中にカッティングユニットを調整する必要が生じた場合は、昇降ジョイスティックを後ろに引き、エンジンを停止させて、調整を行う。調整が終ったら3-9を行う。
-
バックラップするユニット全部に上記手順を行う。
-
設定ができたら BACKLAP 設定を OFF にするかキーを OFF にする。これによりマシンは前進刈り込み設定に戻る。
-
カッティングユニットについているラッピングコンパウンドを完全に洗い落とす。必要に応じてリールとベッドナイフの刃合わせを行う。リール回転速度コントロールを、希望の速度位置にセットする。
Important: カッティングユニットの洗浄には高圧洗浄器を使わないでください。ベアリングやシールを破損させる可能性があります。
センサーのメンテナンス
センサーとセンサーブラケットの点検
| 整備間隔 | 整備手順 |
|---|---|
| 使用するごとまたは毎日 |
|
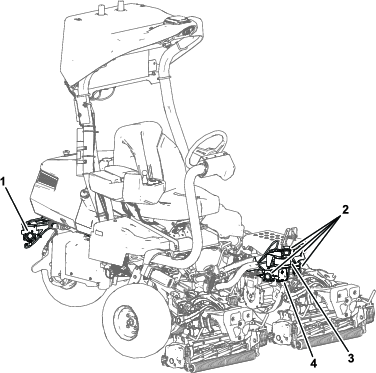
危険
センサーまたはセンサーブラケットが曲がったり壊れたりすると、物体検出システムが誤作動する可能性が高まり、重大な傷害や死亡につながる場合があります。
センサーまたはセンサー ブラケットが曲がったり壊れたりしている場合は、直ちに修理または交換してください。
マシンを自律的に動作させる前に、センサーとセンサー ブラケットを点検してください。
洗浄
センサーの洗浄
| 整備間隔 | 整備手順 |
|---|---|
| 使用するごとまたは毎日 |
|
目立ったゴミの蓄積がある場合やセンサーが機能していない場合は、センサーを必ず洗浄してください。
センサーを損傷する可能性があるため、センサーを過度に洗浄しないでください。
センサーの位置については図 73を参照してください。
Important: センサーを洗浄する際には高圧水を使わないでください。
ソナーセンサーとレーダーセンサーの洗浄
Simple Green®クリーナーまたは同様の低刺激性の石鹸を使って、ソナーまたはレーダーセンサーの残留物やゴミを取り除きます。
ライダーセンサーの洗浄
Note: ライダーセンサーを洗浄するときは硬水の使用を避けてください。
-
適切な洗浄方法を判断する:
-
センサー上のシリアル番号の最初の5文字を探します。シリアル番号はセンサーの下側のラベルに記載されています。
-
最初の5文字がAE001~AE229の場合、2の手順に進みます。
-
最初の5文字がAE230以上の場合、3または4の手順に進みます。
-
-
石鹸水を使って洗浄する。
-
きれいな温水を入れたスプレーボトルを使って、センサーレンズからゴミを取り除きます。
Important: センサー上の汚れやゴミを直接拭き取らないでください。レンズに傷が付く可能性があります。
-
温かい石鹸水とマイクロファイバー製の布を使って、センサーを優しく拭いてください。
Note: センサーの上下ではなく、レンズの曲線に沿って拭いてください。
-
センサーにきれいな水を吹きかけて残った石鹸を洗い流し、清潔なマイクロファイバー製の布で拭き取ります。
-
-
イソプロピルアルコールを使って洗浄する。
-
きれいな温水を入れたスプレーボトルを使って、センサーレンズからゴミを取り除きます。
Important: センサー上の汚れやゴミを直接拭き取らないでください。レンズに傷が付く可能性があります。
-
イソプロピルアルコールと清潔なマイクロファイバー製の布を使って、センサーに残っている汚れやゴミを取り除きます。
-
温かい石鹸水とマイクロファイバー製の布を使って、センサーを優しく拭いてください。
Note: センサーの上下ではなく、レンズの曲線に沿って拭いてください。
-
センサーにきれいな水を吹きかけて残った石鹸を洗い流し、清潔なマイクロファイバー製の布で拭き取ります。
-
-
NACL Optics Cleanerを使って洗浄する。
北米コーティング研究所 (NACL) は、特定の光学デバイス用の洗浄液を開発しました。以下の情報を使って直接注文することができます:
-
NACL部品番号: 98-0020
-
NACLの記述:NACL 精密光学クリーナー 6オンス
-
NACL Precision Optics Cleaner 溶液を清潔で乾いたマイクロファイバー製の布にスプレーします。
-
センサーの上下ではなく、レンズの曲線に沿ってセンサーを優しく拭いてください。
-
保管
長期間にわたって保管する場合には、格納保管の準備の作業を行ってください。
格納保管の準備
可能であれば暖かで乾燥した場所で保管する。
バッテリー:機体に搭載したままでも取り外した場合でも、必ず適切な環境下で保管してください:
-
推奨保管温度範囲:10°C - 25°C
-
保管温度が不適切であると自己放電が早く進みます。
-
保管場所の温度が長期間にわたって氷点下になることが予想される場合には、バッテリーを機体から取り外して適切な温度で保管してください。
-
主電源コネクタを外す;主電源コネクタを参照。
-
機体からゴミや刈りかすをきれいに取り除く。必要に応じてリールと下刃の研磨を行う;カッティングユニットのオペレーターズマニュアルを参照。ベッドナイフとリールの刃先に防錆剤を塗布する。
-
燃料タンクから燃料を抜き取る。エンジンが再度始動したら自然停止まで運転する。燃料フィルタを交換する;燃料フィルタの交換を参照。
-
エンジンがまだ暖かいうちに、エンジンオイルを抜き取る。新しいオイルを入れる;エンジンオイルとフィルタの交換を参照。
-
点火プラグを外し、SAE 30 オイルをシリンダ内に 30 ml 流し込み、クランクを回転させて内部にオイルを十分に行き渡らせる。点火プラグを交換する;点火プラグの整備を参照。
-
シリンダ、エンジン、フィン、ブロアハウジングなどをきれいに清掃する。
-
12V バッテリーケーブルを外す。
-
バッテリー(12V も 48V も)が満充電されていることを確認する;充電手順については、トラクションユニットのサービスマニュアルを参照。
保管中は、6か月ごとに充電状態を点検し、必要に応じて充電する。
-
機体を持ち上げてタイヤに重量がかからないようにする。