Produktöversikt
Översikt över RTK GPS
- Standarddata för GPS-positionering
som hämtas från satelliter med GNSS (Global Navigation Satellite
System) har ett mätfel på mellan
5 och 10 meter. Detta beror på att signalen som tas emot
från en satellit förvrängs på grund av atmosfäriska
och miljömässiga förhållanden.
Positionering med högre precision kan uppnås med hjälp
av RTK-teknik (Real-Time Kinematic).
- Det innebär att en RTK-bas som är placerad på en fast
position används för att ta emot GNSS-signaler från
satelliter. Eftersom basen är fast är
de data som den tar emot kopplade till dess exakta plats.
- Robotarna är också utrustade
med antenner som tar emot GNSS-signaler från satelliter för
att bestämma sin position. Både RTK-basen
och robotarna tar emot GNSS-signalerna från satelliter
i olika konstellationer (GPS, GLONASS, Galileo, BeiDou). Eftersom
robotarna rör sig är dock bedömningen
av deras position mindre exakt än för den fasta basen.
- RTK-basen beräknar korrigeringsdata för varje satellit
och skickar dessa till roboten. Roboten kan sedan använda dessa
korrigeringar för att uppnå en positionsnoggrannhet
på mellan 2 och 3 cm. Tack vare den exakta positioneringen
kan roboten följa ett definierat mönster
och täcka fältet i en serie raka linjer.
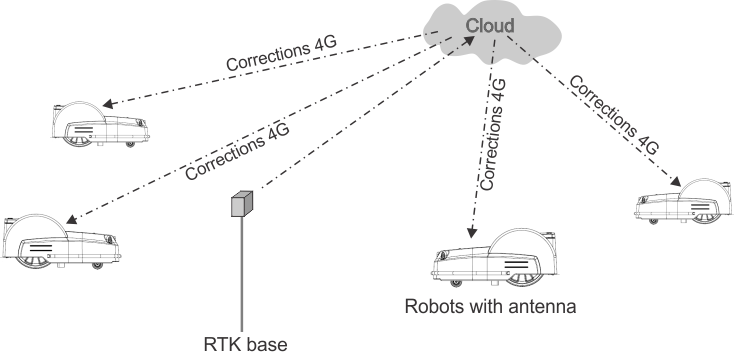
Korrigeringar
kan också göras via molnet med 4G. Då förhindras
inte överföringen av korrigeringsdata av hinder och basen
kan ansluta till ett obegränsat antal robotar
på avstånd på upp till 15 km.
Överföra korrigeringar
med 4G
G520851
En basstation kan förse flera
robotar med korrigeringar, men varje robot får endast ta emot
korrigeringar från en basstation för
att se till att korrigeringarna är konsekventa.
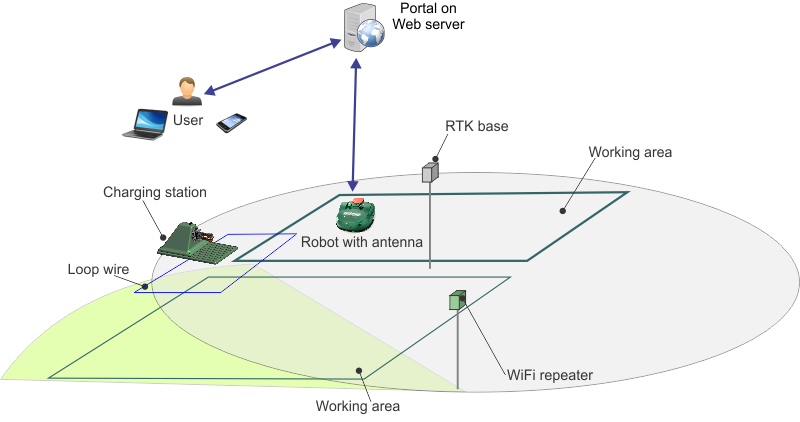
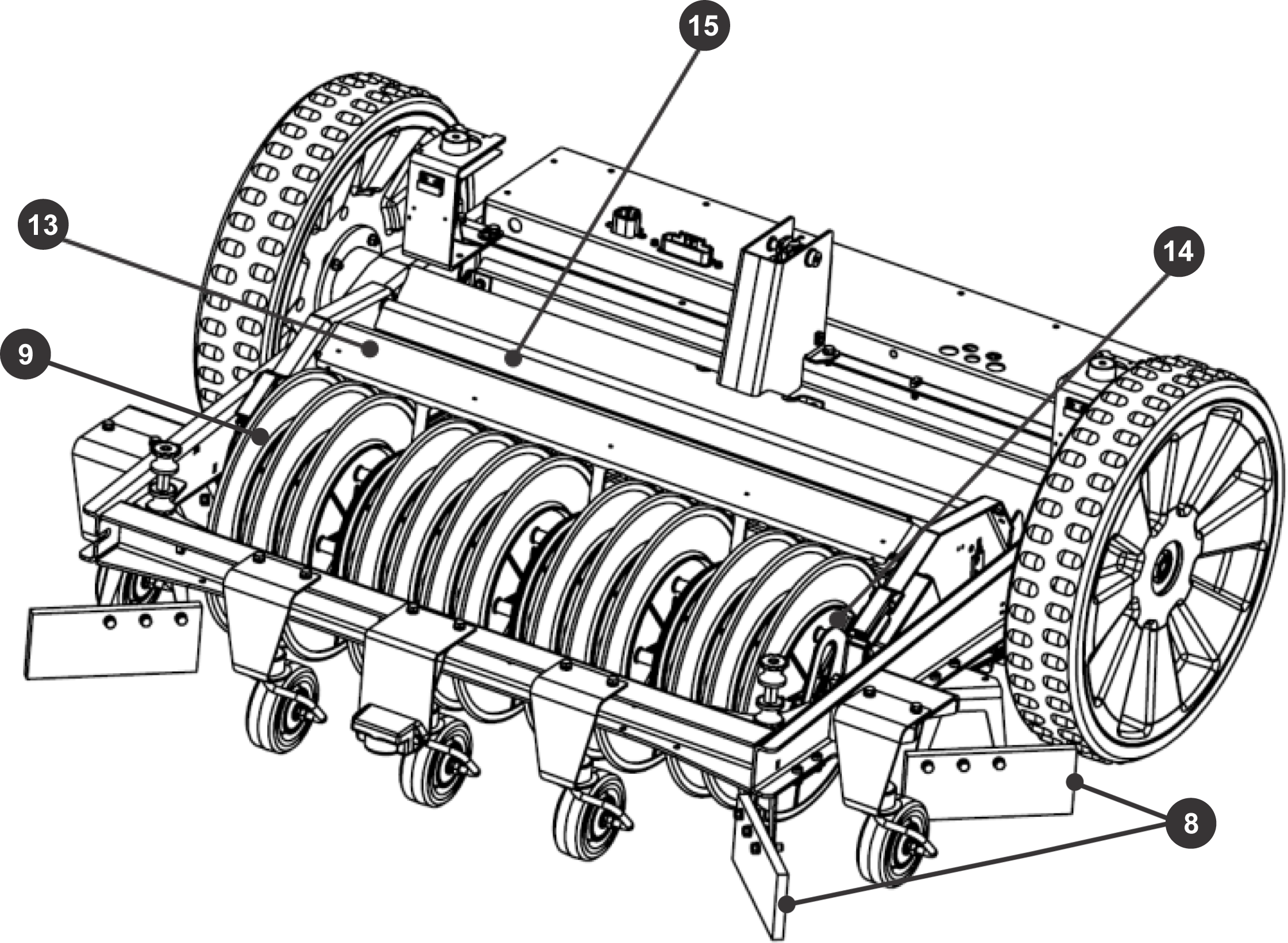
Grundkomponenter i RTK GPS-klippsystemet
G520852
I det här avsnittet beskrivs
robotens mekaniska egenskaper.
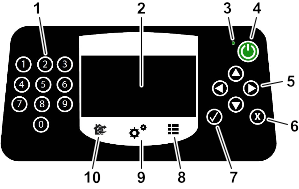
En användare kan styra roboten
direkt med hjälp av användargränssnittet. Efter att
en robot har registrerats på portalen som
körs på en webbserver:
- Roboten kan skicka information
till servern som kan ses av användaren.
- Användaren kan utfärda
kommandon till roboten, bedöma dess prestanda och justera konfigurationen.
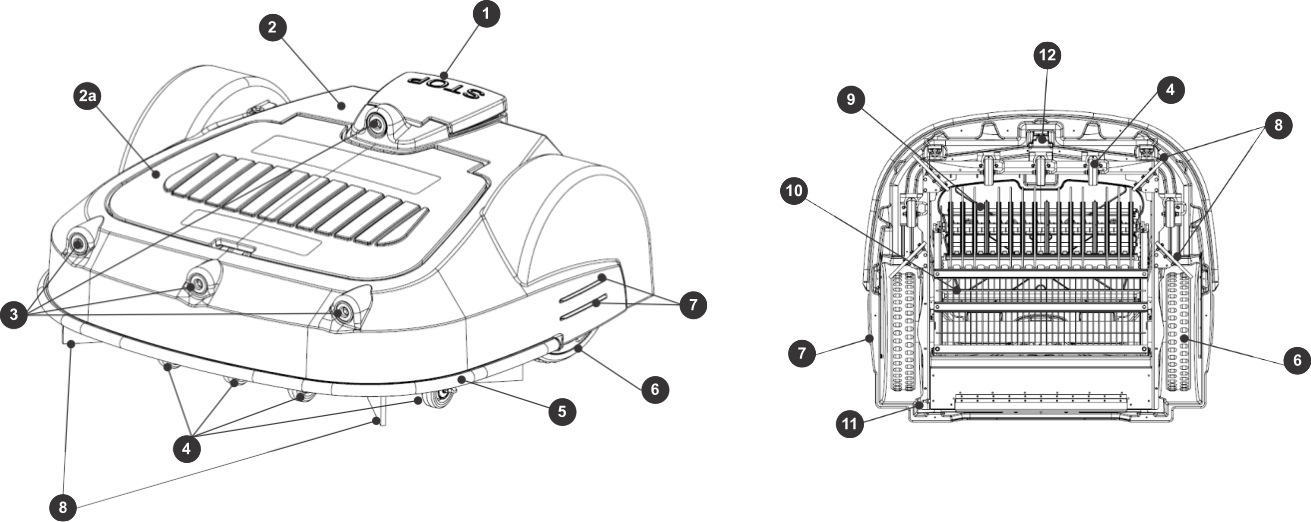
Produktöversikt för Range Pro 100
Sedd uppifrån
G537619
G536774
-
Stoppknapp
-
Kaross
2a: Lock till korgen
-
Sonarsensorer för hinderdetektering
-
Framhjul
-
Stötfångare
-
Bakhjul
-
Laddningskontakter
-
Bollriktare
-
Uppsamlande rulle
-
Uppsamlingskorg
-
Strömbrytare
-
Spole
-
Bollräkningsband
-
Detektor för rotationshastighet
-
Detektor för full korg
Strömbrytare
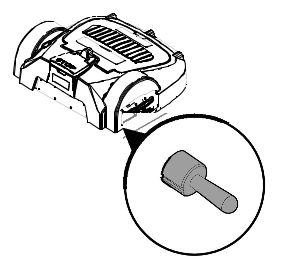 |
Strömbrytaren sitter under
höljet till höger på robotens baksida. Flytta strömbrytaren mot
framsidan av maskinen (till läget PÅ) för att köra roboten. Flytta strömbrytaren mot
baksidan av maskinen (till läget AV) för längre stilleståndstid
eller vinterförvaring.
|
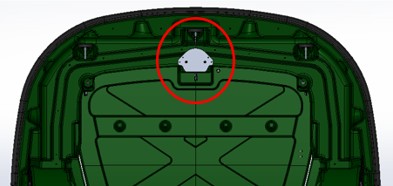
RTK GPS-antenn
G536775
Det här är en särskild
GNSS-antenn som är monterad i mitten framtill på höljet.
Den används för att ta emot data om robotens
globala position från satelliter.
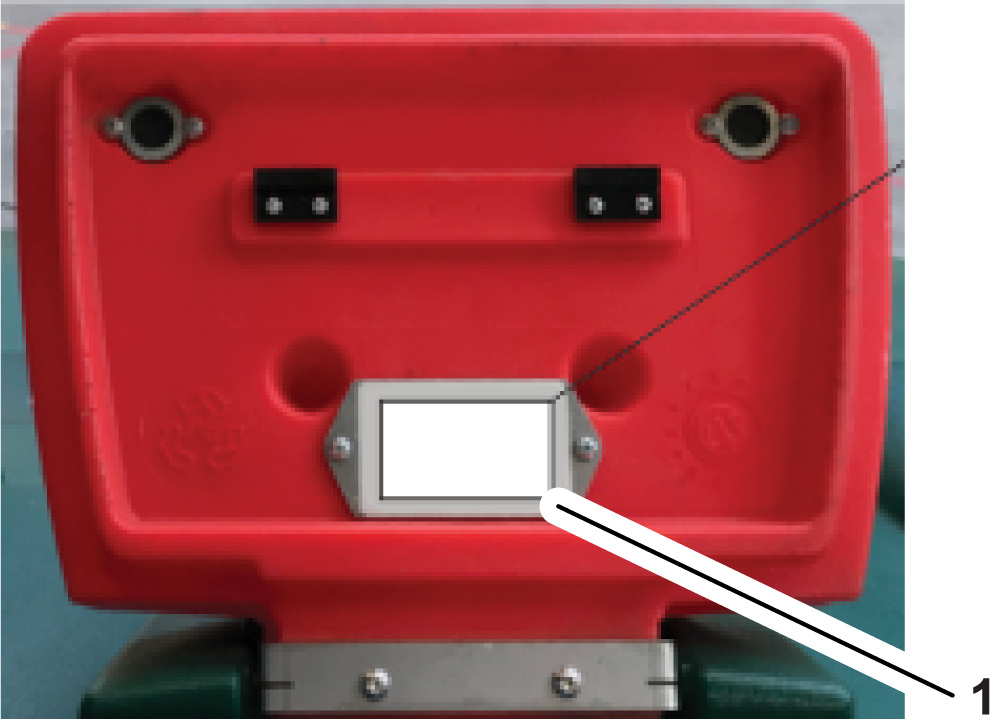
Seriedekal
Identifieringsdekalen
sitter på insidan av luckan till stoppknappen enligt bilden nedan.
G541779
-
Seriedekal
Sensoröversikt
Maskinen är utrustad
med en omfattande uppsättning sensorer som säkerställer
säker drift. Dessa sensorer säkerställer att
roboten kan upptäcka och reagera om ett hinder
ligger i dess väg.
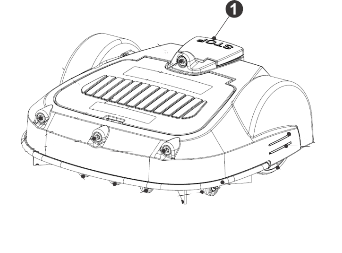
Stoppknapp
Stoppknappen  sitter på robotens ovansida
och syns tydligt. Om du trycker på knappen så stannar roboten
och slutar klippa. Stoppknappen fungerar
också som en lucka, som ger åtkomst till robotens kontrollanvändargränssnitt
när den lyfts upp. En instruktion måste
utfärdas med hjälp av kontrollgränssnittet
för att roboten ska kunna startas om.
sitter på robotens ovansida
och syns tydligt. Om du trycker på knappen så stannar roboten
och slutar klippa. Stoppknappen fungerar
också som en lucka, som ger åtkomst till robotens kontrollanvändargränssnitt
när den lyfts upp. En instruktion måste
utfärdas med hjälp av kontrollgränssnittet
för att roboten ska kunna startas om.
Sonarsensorer för hinderdetektering
Roboten är utrustad med en
uppsättning sonarsensorer som känner av hinder. Roboten
kommer att minska hastigheten om sonardetektorerna
upptäcker ett hinder.
Hinderdetektering med sonarsensorer
G536780
Roboten rör försiktigt
vid hindret i låg hastighet. Roboten rör sig bakåt
och väljer en slumpmässig riktning mellan 60° och
120°.
Dessa sensorer kan upptäcka
objekt som är:
- Minst 400 mm höga
- Minst 50 mm breda (från
alla vinklar)
Om roboten alltid rör sig
i låg hastighet, även om det inte finns några hinder
i sikte, indikerar det ett problem med sensorerna.
I så fall bör du kontakta serviceteamet för
att få hjälp med att analysera problemet. Det finns flera
potentiella orsaker, såsom kondens
inuti sonarhöljet, att en kabelkontakt är lös eller
att sonarelektroniken är skadad. Problemet kan analyseras
via Teknikerns meny (9) > Service
> Sonarsensorer och Teknikers meny (9) > Service >
Tester > Sonarsensorer.
Stötfångare
Stötfångaren är
en trycksensor som känner av när roboten kommer i kontakt
med ett hinder. När stötfångaren kommer i kontakt
med hindret rör sig roboten bakåt
och roterar sedan i en vinkel tills den kan undvika hindret.
Spole
Induktionsspolen
känner av intensiteten hos det magnetfält som genereras
i begränsningskabeln. Den maximala intensiteten är
placerad på kabeln som får roboten
att stanna, rotera och fortsätta att klippa i en ny riktning.
Lutningssensor
Lutningssensorn känner av
vinkeln på sluttningen där roboten arbetar. Om vinkel överskrids
så utlöses ett larm och roboten
stannar.
Vältsensor
Vältsensorn känner av
om roboten har välts upp och ned eller om någon försöker
starta motorn när roboten är vänd upp och ned.
Temperatursensor
Temperatursensorn mäter omgivningstemperaturen
och förhindrar att roboten arbetar om temperaturen är för
låg. Den lägsta temperatur som
roboten kan arbeta i ställs in som en driftparameter.
Redskap/tillbehör
Det finns ett urval av godkända
redskap och tillbehör från Toro som du kan använda för
att förbättra och utöka maskinens kapacitet. Kontakta
en auktoriserad återförsäljare eller auktoriserad
Toro-distributör, eller gå
till www.Toro.com för att se en lista
över alla godkända redskap och tillbehör. Använd
endast originalreservdelar och tillbehör från Toro för att garantera
optimal prestanda och fortlöpande säkerhet för produkten.
Specifikationer
Obs! Delarnas specifikationer och utformning kan ändras utan föregående
meddelande.
Kapacitet
| Maximal arbetsyta |
30 000 m2 |
| Rekommenderat arbetsområde |
24 000 m2 |
| Arbetshastighet
|
3,6 km/h
|
| Maximal lutning som standard |
30 % (17°) |
| Bollar/dag
|
Genomsnitt=15 600. Maximalt=19 500. |
| Plockbredd
|
956 mm
|
| Korgens kapacitet |
320–350 bollar
|
| Maximal ljudnivå |
61 dB(A) vid 1 m. 52 dB(A)
vid 5 m |
Batteri
| Typ
|
LiFePo4
|
| Nominell spänning |
25,6 V
|
| Nominell kapacitet |
19,2 Ah
|
| Energi
|
491,5 Wh
|
| Tid till full laddning (minimum) |
80 minuter
|
| Genomsnittlig arbetstid per laddning |
240 minuter
|
| Genomsnittlig årsförbrukning |
620 kWh (baserat på
användning under 11 månader om året)
|
Vikt och mått
| Vikt [kg]
|
85 kg
|
| Längd [mm]
|
118 cm
|
| Bredd [mm]
|
134 cm
|
| Höjd [mm]
|
54 cm
|
Programvara och övervakning
| Säkerhets-PIN-kod |
Ja
|
| GPS-positionering |
RTK
|
| Robothantering via server och
app. |
Standard
|
Intelligens
| Sonardetektering av hinder |
4
|
| Återvänd till stationen
via GPS |
Ja
|
| Flera startzoner
|
Ja
|
| Flera fält
|
Ja, fler än 2 |
| Flera robotar per station |
Max 2 robotar som använder
droppgropstationen. |
| Lyftsensorer
|
Nej
|
| Backningssensorer |
Ja. Får roboten att ändra
riktning. |
| Stötdämpare för
säkerhet |
Elektronisk
|
| Lutningssensorer
|
Ja. Gör att roboten stannar
när den lutas mer än 41°.
|
Underhåll
Underhållsöversikt
- Med underhåll avses en rad
uppgifter som bör utföras regelbundet under klippsäsongen.
- Serviceintervallet beror till
viss del på robotens driftsbelastning, men vi rekommenderar att
den servas av en auktoriserad tekniker
minst en gång om året.
- Försök inte att ändra
roboten när du underhåller den för optimal prestanda.
Du riskerar att störa robotens funktion, orsaka
en olycka och skada dess delar.
Obs! Ring en tekniker om du upptäcker något ovanligt beteende
eller en skada.
- Följande säkerhetsföreskrifter
bör följas när underhållsprocedurerna utförs:
- Stanna maskinen: Stäng alltid
av strömmen och vänta tills alla rörliga delar har
stannat innan du hanterar maskinen.
- Använd inaktiveringsfunktionen
- innan du utför arbete på
maskinen eller lyfter upp den
- innan du rensar blockeringar
- innan du kontrollerar, rengör
eller utför arbete på maskinen
- när maskinen har kört
på ett främmande föremål för att kontrollera
att den inte har skadats
- om maskinen börjar vibrera
på ett onormalt sätt.
- Se till att alla muttrar, bultar
och skruvar är åtdragna så att maskinen är i säkert
bruksskick.
- Använd handskar: skyddshandskar
måste användas vid hantering av maskinen.
- Använd alltid delar från
en tillverkare av originalutrustning (OEM). Förutom olycksrisken
innebär användning av delar som
inte kommer från en OEM att garantin inte gäller
vid eventuella skador.
Rekommenderat underhållsschema
Obs! Dessa procedurer bör utföras med rekommenderad frekvens
av den som använder roboten huvudsakligen.
Obs! Du bör regelbundet kontrollera att alla skruvar, muttrar och
bultar är ordentligt åtdragna under hela klippsäsongen.
Dra åt alla som är lösa och
kontakta en auktoriserad Toro-återförsäljare om du
upptäcker några skador eller tecken på problem.
| Före varje användningstillfälle
eller dagligen |
|
| Var 40:e timme |
|
|
|
|
|
|
|
|
|
|
|
| Var 6:e månad
|
|
| En gång per år eller
innan förvaring
|
|
| |
Cleaning
Rengöra maskinen
Under perioder
med vått väder är det nödvändigt att se till
att lera och gräs inte ansamlas på de rörliga delarna,
vilket omfattar hjulen och klipphuvudena.
Dessa bör inspekteras och rengöras dagligen.
-
Tryck på
den röda knappen för att stanna roboten.
-
Lägg
maskinen med baksidan nedåt.
-
Stäng
av maskinen.
-
Ta bort alla
ansamlingar av gräs och smuts med en blåsare, tryckluft
och/eller en stålborste.
-
Gnugga karossen
med en mjuk, fuktig trasa eller svamp.
-
Använd
en tvållösning om karossen är mycket smutsig.
Använd
aldrig lösningsmedel.
Rengöra laddningskontakterna
-
Gnugga laddningskontaktytorna
med sandpapper (kornstorlek 280) tills de ser rena ut.
Rengöra stötfångaren
-
Kontrollera
att stötfångarens material är intakt. Om det finns
sprickor eller skador ska du kontakta en auktoriserad Toro-återförsäljare.
-
Rengör
stötfångaren med en fuktig trasa.
Rengöra sonarsensorerna
Sonarsensorerna måste hållas
rena för att fungera korrekt. Alla sensorer måste fungera
korrekt. Om någon av sensorerna inte
fungerar korrekt utlöses ett larm.
-
Ta bort lera,
gräs och smuts och torka av med en fuktig trasa.
Rengöra framhjulen
-
Ta bort lera
och gräs med en stålborste eller trasa.
-
Kontrollera
att hjulen roterar fritt och att spelet inte är för stort.
Om spelet är för stort ska du byta ut hjulen.
Rengöra framhjulsaxeln
-
Rengör
framhjulsaxeln med en borste och/eller en trasa.
-
Okulärbesiktiga
axeln. Byt ut axeln om det uppstår ett problem.
Rengöra bakhjulen
-
Ta bort lera
och gräs med en stålborste.
Electrical System Maintenance
Kontrollera kablarna
-
Okulärbesiktiga
ledningarna under roboten. Kontakta en auktoriserad Toro-återförsäljare
om du upptäcker problem.
Batteriservice
Robotens automatiska (programmerade)
drift optimerar batteriets livslängd. Vi rekommenderar att du
låter roboten hantera sina arbetscykler.
Kontakta en auktoriserad Toro-återförsäljare för
att kontrollera batteriets skick om arbetscyklerna verkar ovanligt
korta.
Obs! Du kan övervaka cyklerna med hjälp av portalen.
Ordlista
Kantläge
När roboten
klipper gräset vid utkanten av fältet. Detta görs ett
antal gånger per vecka.
Cykel
En cykel är robotens
arbetspass. Den börjar när roboten lämnar stationen
och slutar när den återvänder till stationen eller
om det uppstår ett problem som avbryter arbetscykeln.
Enhet
En samling robotar och
användare som arbetar på en anläggning. Du kan se information
om robotarna i en enhet på webbportalen.
GPS-navigeringszon
Det här
är en RTK GPS-zon som definieras av gränsdetekteringsprocessen.
Zonen omfattar hela arbetsområdet. Underzoner kan
sedan skapas genom att zonen kopieras och redigeras för
att optimera robotens effektivitet.
GPS-punkt
En specifik punkt i en
parcell som roboten använder för att återvända
till eller lämna en station. Punkten definieras utifrån
dess latitud och longitud. Roboten åker direkt
till den här punkten och följer sedan spårgränsen
och slingkabeln för att återvända
till stationen.
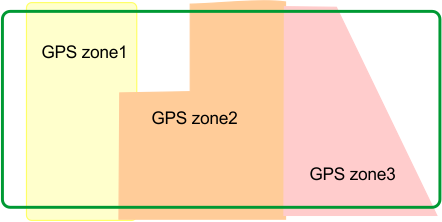
GPS-zon
En GPS-zon definieras utifrån
en uppsättning GPS-koordinater. Det innebär att en kabelansluten
parcell kan delas upp utan att ytterligare kablar
och kanaler behöver användas.
GPS-zoner i en kabelansluten parcell
G520046
Det här ger större flexibilitet
när det gäller att definiera arbetsområden eftersom
roboten kan schemaläggas att arbeta med optimal
effektivitet över zonerna.
Inaktiv
En robot går in i
inaktivitetsläge om det aktuella uppdraget har avslutats med
stoppknappen. Som standard går roboten in i
viloläge efter 15 minuter.
Ö
En slinga i begränsningskabeln
som specifikt har installerats för att förhindra att roboten
arbetar inuti den. Begränsningskabeln dras
runt hindret och infarts- och utfartskablarna placeras bredvid varandra.
Karta
Karta över robotens
rutter i portalen.
Kartläggning
Informationen
som roboten bygger upp med hjälp av GPS-data.
Förbjuden zon
GPS-definierade
förbjudna zoner är områden på fältet som
definieras utifrån GPS-koordinater där roboten aldrig får
komma in under något av de autonoma driftlägena.
GPS-definierade förbjudna zoner används för att utesluta
zoner från robotens arbetsområde som den
inte känner av under gränsdetekteringen. Med hjälp
av GPS-definierade förbjudna zoner kan roboten beräkna det
mest effektiva klippmönstret i förväg.
GPS-definierade förbjudna zoner används för att utesluta
hinder. Det görs vanligtvis genom att man skapar ”öar” och ”pseudoöar”.
Hinder
Ett objekt på fältet
som roboten måste undvika. Hinder kan vara permanenta (t.ex.
träd, möbler) eller tillfälliga (t.ex. djur).
Hinder upptäcks av sensorer. Permanenta hinder kan
undvikas genom att man gör slingor i begränsningskabeln
som bildar ”öar” eller ”pseudoöar”.
Parcell
Ett område som ska
klippas innanför en begränsningskabel. Minst en parcell
är kopplad till en kabel. Flera parceller kan definieras.
Procent
Representerar hur lång
tid roboten arbetar med en viss parcell. Om det bara finns en parcell
spenderar roboten 100 % av tiden där.
Begränsningskabel
En kabel som
placeras under fältets yta och som definierar området där
roboten arbetar. Området som definieras av begränsningskabeln
kallas för en ”parcell”.
Pseudoö
Begränsningskabeln
dras runt hindret och ett specifikt avstånd mellan infarts- och
utfartskablarna upprätthålls.
Robotens statusvärden
- Avstängd
Roboten har stängts av.
- Avstängd efter larm
Roboten har stängt av sig
efter ett larm.
- Larm
Roboten är i larmläge.
- Stannar
Robot väntar vid en laddstation.
- Laddning
Robotens batteri laddas.
- På väg mot avlastningsstation
Roboten är på väg
till avlastningsstationen för att lasta av bollar. Den här
statusen börjar när en robot bestämmer sig för
att återvända till stationen.
- På väg mot laddstation
Roboten är på väg
till laddstationen. Den här statusen börjar när roboten
bestämmer sig för att återvända till stationen.
- Lämnar stationen
Roboten är på väg
från stationen och börjar arbeta.
RTK GPS-zon
Arbetsområdet för
en robot som utför mönsterklippning. RTK GPS-zonen definieras
genom att roboten gör en tur runt begränsningskabeln.
Anläggning
Hela området
där det område som roboten arbetar i ingår.
Viloläge
En robot går
in i viloläge 15 minuter efter att ett larm har utlösts
och inte rensats. Efter två dagar i viloläge går roboten
in i avstängt läge. Det sker också
om batteriets laddningsnivå är för låg. I viloläget
använder roboten en minimal mängd ström
för att minska risken för batteriet.
Du kan ta ut
roboten ur viloläget genom att
- rensa larmet och slå på
roboten med knappen på lysdiodskärmen
- skjuta roboten till laddstationen
om batteriet är tomt
- skicka ett fjärraktiveringskommando
via webbportalen.
Startzon
Ett definierat läge
i en parcell som bestämmer var roboten kommer att börja
arbeta.
Stationsslinga
En stationsslinga
är en kort kabel runt en laddstation som används för
att styra in roboten i stationen. När roboten känner
av att den befinner sig i stationsslingan följer
den kabeln tills den kommer till stationen.
Terräng
Ett gräsområde
som omger fältet vilket inte ska klippas.
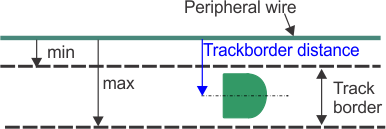
Spårgräns
En gräskant
som löper längs kanten på den parcell där roboten
arbetar. Roboten följer spårgränsen när den lämnar
eller återvänder till en station om den
inte använder GPS. Det finns ingen spårgräns specificerad
för en kabel som fungerar som en slinga för
att återgå till stationen.
Spårgränsen löper
bredvid begränsningskabeln och definieras utifrån minsta
och maximala mått som angetts som installationsparametrar.
Den är bredare än roboten. Robotens väg
innanför spårgränsen väljs slumpmässigt.
Det säkerställer att roboten inte rör sig
längs samma väg upprepade gånger och därmed
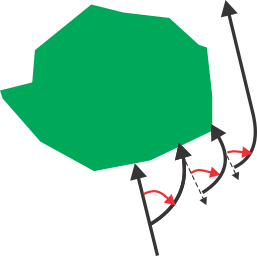
skapar hjulspår på fältet. Om roboten stöter på
ett hinder när den befinner sig på spårgränsen
får sensorerna den att backa och sedan rotera i en slumpmässig
vinkel för att kunna fortsätta. Detta kan upprepas
flera gånger om det behövs.
Manövrer för att undvika
ett hinder innanför spårgränsen
G520315