Vue d'ensemble du produit
Robot tondeuse série Turf Pro – Vue d'ensemble du produit
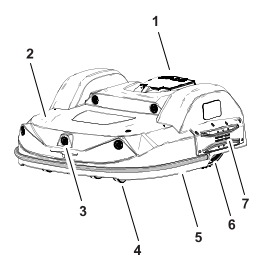
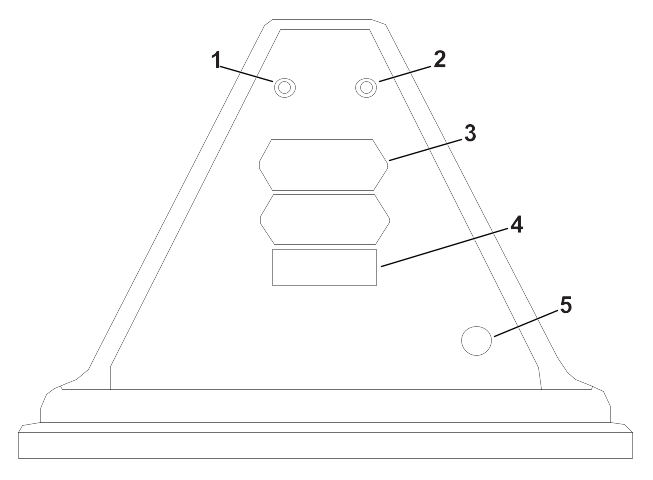
Vue de dessus
G538206
-
Bouton d'arrêt
-
Carrosserie
-
Sonars de détection d'obstacle
-
Roues avant
-
Pare-chocs
-
Roues arrière
-
Contacts de charge
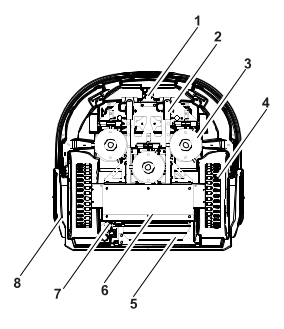
Vue de dessous(modèle 300)
G538280
-
Bobine
-
Roues avant
-
Têtes de coupe
-
Roues arrière
-
Batterie
-
Boîtier électronique
étanche (smartbox)
-
Interrupteur Marche/Arrêt
-
Contacts de charge
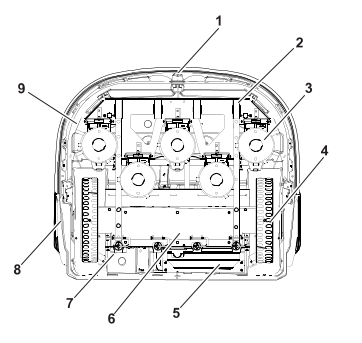
Vue de dessous(modèle 500)
G529049
-
Bobine
-
Roues avant
-
Têtes de coupe
-
Roues arrière
-
Batterie
-
Boîtier électronique
étanche (smartbox)
-
Interrupteur Marche/Arrêt
-
Contacts de charge
-
Protection de disque
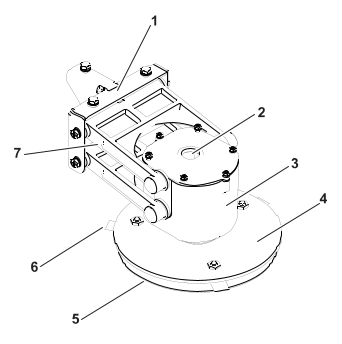
Tête de coupe
G526500
-
Support
-
Entrée du câble
-
Carter du moteur
-
Disque support de lame
-
Disque anti-friction
-
Lame
-
Pantographe
Remarque : Le disque support de lame , le disque anti-friction
, le disque anti-friction et les lames
et les lames sont désignés collectivement
sous le nom de « disque de coupe ».
sont désignés collectivement
sous le nom de « disque de coupe ».
Interrupteur Marche/Arrêt
(modèle 300)
|
L'interrupteur marche/arrêt
se trouve sous la carrosserie, sur le côté arrière
gauche du robot. Déplacez l'interrupteur marche/arrêt
vers la droite (position marche) pour
utiliser le robot. Déplacez l'interrupteur marche/arrêt
vers la gauche (position arrêt) en cas d'inactivité prolongée ou pour le remisage d'hiver. |
Interrupteur Marche/Arrêt
(modèle 500)
 |
L'interrupteur marche/arrêt
se trouve sous la carrosserie, sur le côté arrière
droit du robot. Levez l'interrupteur marche/arrêt
(position marche) pour
utiliser le robot. Baissez l'interrupteur marche/arrêt
(position arrêt) en cas d'inactivité prolongée ou pour le remisage d'hiver. |
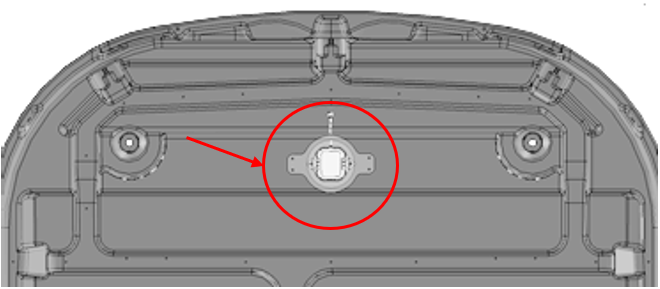
Antenne GPS RTK
G519918
Cette antenne GNSS spécifique
est montée au centre à l'avant de la coque. Elle permet
de recevoir les données sur la position
mondiale du robot envoyées par les satellites.
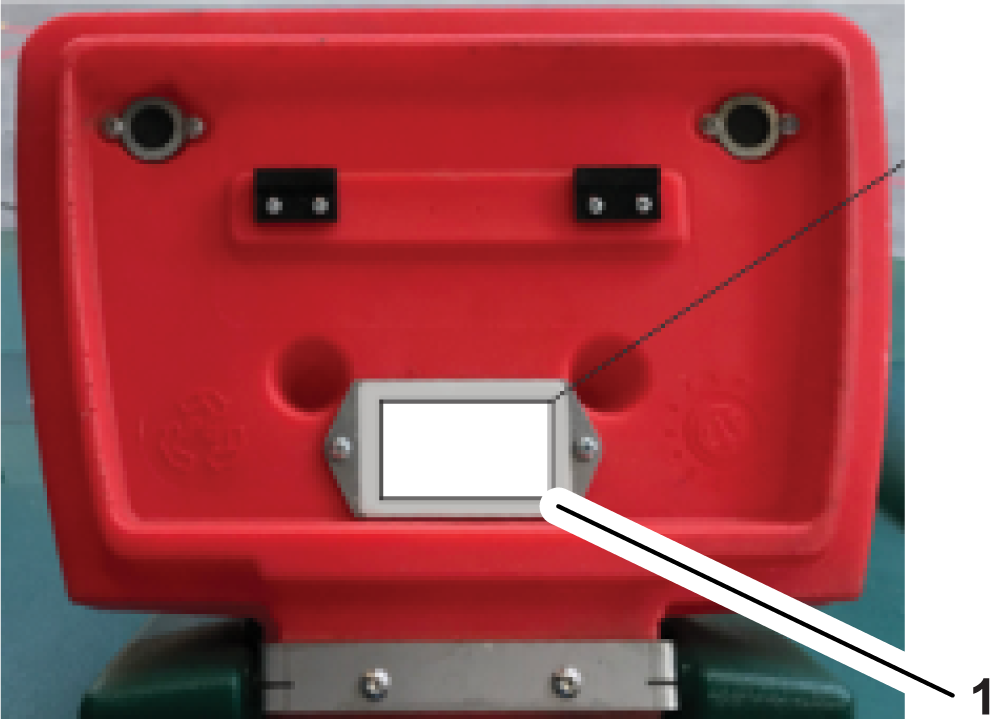
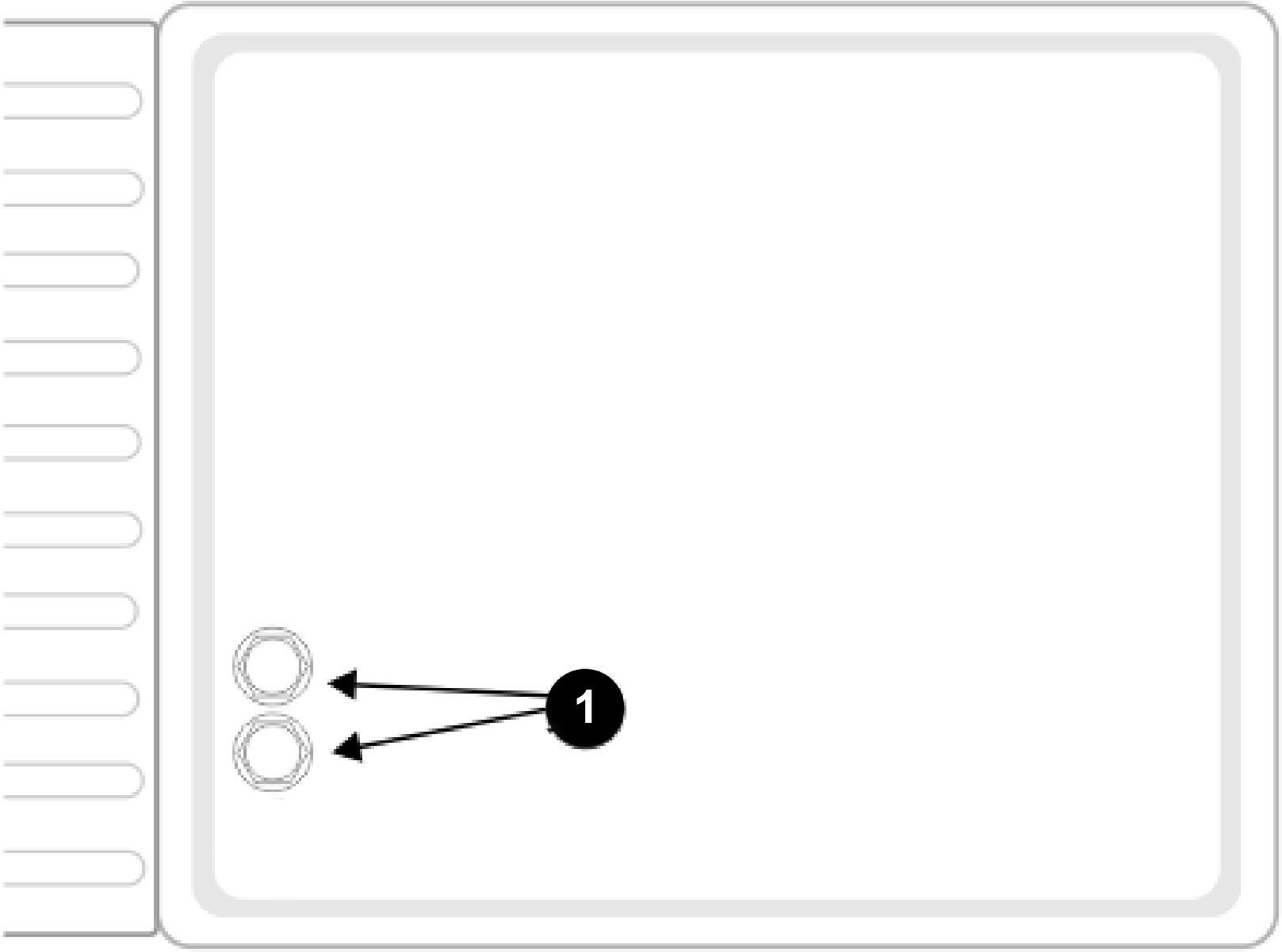
Autocollant du numéro de
série
L'étiquette d'identification
se trouve à l'intérieur du couvercle du bouton d'arrêt,
comme montré ci-dessous.
G541779
-
Autocollant du numéro de
série
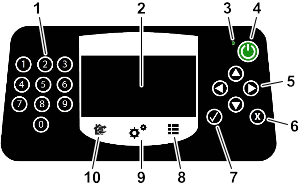
Vue d'ensemble des capteurs
La machine
est équipée d'un jeu complet de capteurs qui garantissent
son fonctionnement sûr. Ces capteurs permettent au robot
de détecter et de réagir si un obstacle
se trouve sur sa trajectoire.
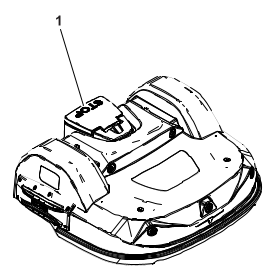
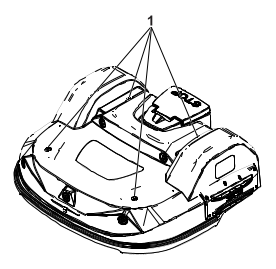
Bouton d'arrêt
Le bouton d'arrêt  , situé sur le haut du robot,
est facilement visible. Lorsque vous appuyez sur ce bouton, le robot
s'immobilise et cesse de tondre. Le bouton
d'arrêt fait aussi office de couvercle qui, lorsqu'il est soulevé,
permet d'accéder à l'interface utilisateur
de commande du robot. Une instruction doit être
émise à partir de cette interface de commande pour que le
robot redémarre.
, situé sur le haut du robot,
est facilement visible. Lorsque vous appuyez sur ce bouton, le robot
s'immobilise et cesse de tondre. Le bouton
d'arrêt fait aussi office de couvercle qui, lorsqu'il est soulevé,
permet d'accéder à l'interface utilisateur
de commande du robot. Une instruction doit être
émise à partir de cette interface de commande pour que le
robot redémarre.
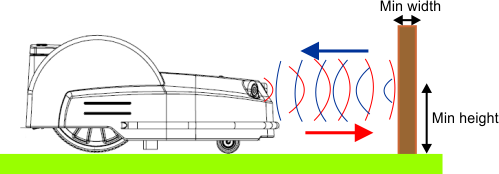
Sonars de détection d'obstacle
Le robot est équipé
d'une série de capteurs sonars pour détecter les obstacles.
Le robot ralentit si les capteurs sonars détectent
un obstacle.
Détection des obstacles par
les capteurs sonars
G525070
Si le robot se déplace
toujours à petite vitesse, alors qu'aucun obstacle n'est visible,
cela indique un problème au niveau
des capteurs. Dans ce cas, demandez l'aide du service technique pour
analyser le problème.
Pare-chocs
Le
pare-chocs est un capteur de pression qui détecte le contact
du robot avec un obstacle. Lorsque le pare-chocs touche l'obstacle,
le robot recule, puis pivote selon un angle
lui permettant d'éviter l'obstacle.
Capteurs de levage et de déplacement de la carrosserie
Emplacement des fixations des
capteurs de levage
G538312
-
Fixations des capteurs de levage
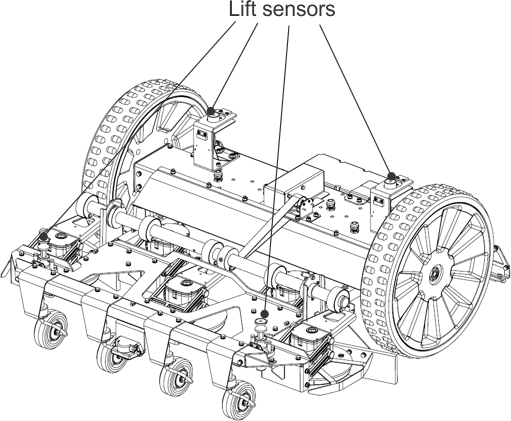
Capteurs de levage (série
500 montrée)
G525072
Les capteurs de levage
sont fixés sur la carrosserie du robot en 4 points. Les capteurs
de levage réagissent si le robot touche
un objet bas qui pousse la carrosserie vers le haut ou si quelqu'un
tente de soulever le robot par la carrosserie. Le robot
s'arrête alors de tondre et recule. Si ce mouvement
permet de dégager la carrosserie de l'obstacle, le robot exécute
une manœuvre pour éviter l'objet
et continue de tondre. Dans le cas contraire, le robot déclenche
une alarme après 10 secondes et reste
en mode de sécurité (immobile) jusqu'à ce
que l'obstacle soit éliminé.
Bobine
La
bobine d'induction détecte l'intensité du champ magnétique
qui est généré dans le câble périphérique.
L'intensité maximale est située
sur le câble, ce qui provoque l'arrêt du robot, sa rotation
et la poursuite de la tonte dans une nouvelle direction.
Capteur d'inclinaison
Le capteur d'inclinaison détecte
l'angle de la pente sur laquelle le robot travaille. Une alarme se
déclenche et le robot arrête
de tondre si l'angle est dépassé.
Capteur de retournement
Le capteur de retournement détecte
si le robot s'est renversé ou si quelqu'un tente de démarrer
le moteur lorsque le robot est renversé.
Capteur de température
Le capteur de température
mesure la température ambiante et empêche le fonctionnement
du robot si elle est trop basse. La température
minimale de fonctionnement du robot est réglée en tant que
paramètre de fonctionnement.
Récepteur GPS RTK
Ce capteur recueille les données
des satellites pour déterminer la position mondiale précise
du robot.
Accessoires/outils
Une sélection d'outils et
accessoires agréés par Toro est disponible pour augmenter
et améliorer les capacités de la machine. Pour obtenir la
liste de tous les accessoires et outils agréés,
contactez votre dépositaire-réparateur ou votre distributeur Toro agréé,
ou rendez-vous sur www.Toro.com. Pour garantir
un rendement optimal et conserver la certification de sécurité
de la machine, utilisez uniquement des pièces
de rechange et accessoires Toro d'origine.
Vue d'ensemble de la station de charge
Remarque : Le modèle 30914 est
montré. L'apparence varie légèrement selon le modèle.
Pour en savoir plus, voir le manuel de charge.
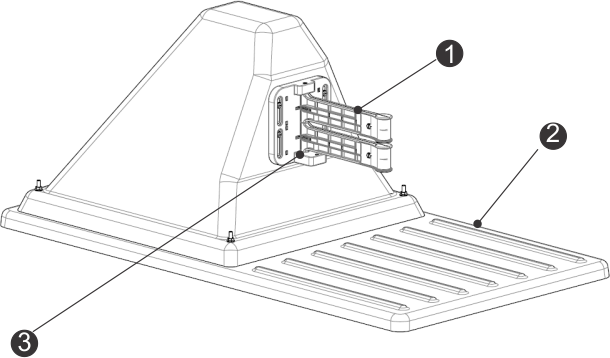
Composants de la station de charge
G520730
- Bras
de charge
- Socle
- Capteur
d'occupation
Vue arrière de la station
de charge
G537669
- LED Za
- LED ZL
- Étiquette
d'identification
- Autocollant
- Entrée
du câble d'alimentation
Vue de dessous de la station de
charge
G538193
- Entrée
du câble périphérique
LED
Les LED indiquent l'état
actuel de chaque câble. Voir le tableau suivant.
| Clignotement vert |
Le câble fonctionne normalement. |
| Clignotement rouge |
Aucun câble périphérique
détecté. Le câble est peut-être coupé ou
trop long. |
| Rouge continu
|
Cela indique un problème.
Le câble est peut-être trop court (moins de 200 m)
ou le système électronique présente un problème. |
Les LED sont identifiées
comme suit :
- ZL : le câble de
la zone de boucle de station
- Za : le câble de la
zone de travail A
- Zb : le câble de la
zone de travail B
Remarque : Si vous utilisez une station de
charge avec plusieurs boucles et si vous n'utilisez pas l'une d'entre
elles, la LED clignote en rouge. Pour que
la LED cesse de clignoter en rouge, réglez la voie de la carte
à 9.
Caractéristiques techniques
Remarque : Les spécifications et la
conception peuvent faire l'objet de modifications sans préavis.
Capacité
| Surface de travail maximale [m2]
|
75 000 m2 |
75 000 m2 |
45 000 m2 |
| Surface de travail recommandée
[m2]
|
55 000 m2 |
55 000 m2 |
35 000 m2 |
| Largeur de tonte [mm] |
1033 mm-
|
1033 mm
|
633 mm
|
| Vitesse de travail [km/h] |
3,6 km/h
|
3,6 km/h
|
2,8 km/h
|
| Pente maximale [%] |
45 % (24°) |
30% (17°)
|
35% (19,5°)
|
Tonte
| Nombre de têtes de coupe |
5
|
3
|
| Nombre de lames de coupe |
15
|
9
|
| Hauteur de coupe minimale (disque
standard/disque basse hauteur de coupe)
|
20 mm / 15 mm- |
20 mm / 15 mm |
| Hauteur de coupe maximale (disque
standard/disque basse hauteur de coupe)
|
100 mm / 90 mm-
|
100 mm / 90 mm |
| Réglage des têtes de
coupe |
Électronique |
Électronique |
| Niveau sonore maximal (mesuré
à 5 m) |
52 db(A)
|
52 db(A)
|
Batterie
| Type
|
LIFePo4
|
LIFePo4
|
| Tension nominale [V] |
25,6 V
|
25,6 V
|
| Capacité nominale [Ah] |
19,0 Ah
|
19,0 Ah
|
| Énergie [Wh] |
486,4 Wh
|
486,4 Wh
|
| Plage de température de travail |
-5 °C à +60 °C |
-5 °C à +60 °C |
| Durée de tonte moyenne [min] |
110
|
280
|
| Durée moyenne de charge complète
[min] |
90
|
90
|
Poids et dimensions
| Poids [kg]
|
71 kg-
|
52 kg
|
| Longueur [mm]
|
1 110 mm-
|
1 002 mm |
| Largeur [mm]
|
1 278 mm-
|
1 044 mm |
| Hauteur [mm]
|
515 mm-
|
466 mm
|
Logiciel et surveillance
| Code PIN de sécurité |
Oui
|
Oui
|
| Emplacement du GPS |
RTK
|
RTK
|
| Gestion du robot via serveur et
appli. |
Standard
|
Standard
|
Intelligence
| Détection des obstacles par
sonar |
Multiple
|
Multiple
|
| Retour à la station via GPS |
Oui
|
Oui
|
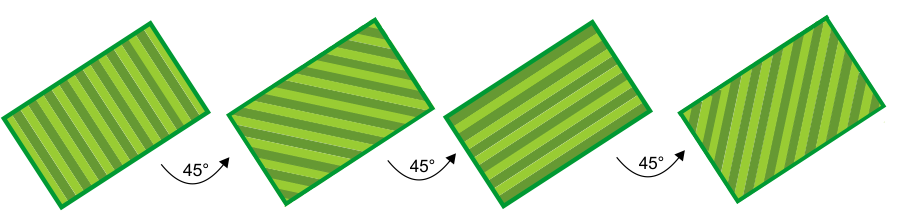
| Type de tonte
|
Motifs
|
Motifs
|
| Zone de démarrage multiple |
Oui
|
Oui
|
| Surfaces de travail multiples
(option) |
Oui
|
Oui
|
| Robots/stations multiples |
Non
|
Non
|
| Sonars pour détection d'obstacle |
5
|
5
|
| Pare-chocs résistif pour
collision |
1
|
1
|
| Capteurs de levage avant |
2
|
2
|
| Capteurs de levage arrière |
2
|
2
|
| Capteur de collision arrière |
2
|
2
|
| Capteur de retournement / d'inclinaison |
1
|
1
|
| Déflecteurs des têtes
de coupe |
2 (un sur chaque tête de
coupe extérieure) |
Aucun
|
Entretien
Vue d'ensemble de l'entretien
- L'entretien fait référence
à un ensemble de tâches qui doivent être effectuées
régulièrement pendant toute la saison de tonte.
- La fréquence d'entretien
dépends dans une certaine mesure de la charge opérationnelle
du robot, mais il est recommandé de
le faire réviser par un technicien agréé au moins
une fois par an.
- Pendant l'entretien du robot pour
obtenir des performances optimales, n'essayez pas de lui apporter
des modifications. Cela pourrait en perturber
le fonctionnement, causer des accidents ou endommager des pièces.
Remarque : Si vous constatez un comportement
inhabituel ou des dommages, appelez un technicien.
- Lors des procédures d'entretien,
observez les consignes de sécurité suivantes :
- Arrêtez la machine :
mettez-la toujours hors tension et attendez l'arrêt de toutes
les pièces mobiles avant de la manipuler.
- Actionnez le dispositif de désactivation
avant d'effectuer les opérations suivantes :
- Avant d'intervenir sur la machine
ou de la soulever.
- Avant de dégager des obstructions.
- Avant de contrôler, de nettoyer
ou d'effectuer toute opération sur la machine.
- Après avoir heurté un
obstacle pour vérifier l'état de la machine.
- Si la machine se met à vibrer
de façon anormale.
- Gardez tous les écrous, boulons
et vis toujours bien serrés pour garantir l'utilisation sûre
de la machine.
- Utilisez des gants : le port
de gants de protection est obligatoire chaque fois que vous manipulez
la machine.
- Utilisez toujours des pièces
OEM (d'origine). Outre le risque d'accidents, l'utilisation de pièces
non OEM entraînera l'annulation
de la garantie pour tout dommage occasionné.
Programme d'entretien recommandé
Remarque : Ces procédures doivent être
effectuées à la fréquence recommandée par l'utilisateur
régulier du robot.
Remarque : Tout au long de la saison de tonte,
vous devez contrôler régulièrement le bon serrage des
toutes les vis, ainsi que tous les écrous
et boulons. Resserrez tous ceux qui en ont besoin et, si vous constatez
un dommage ou la preuve d'un problème, contactez
un distributeur Toro agréé.
| Avant chaque utilisation ou chaque
jour |
|
| Toutes les 40 heures |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| Tous les 6 mois |
|
|
|
| Une fois par an ou avant le
remisage |
|
| |
Entretien des unités de coupe
Inspection de l'unité de
coupe
-
Inspectez
les lames, les boulons des lames et le disque de coupe chaque semaine
pour maintenir un fonction de coupe correcte.
Remplacement des lames
L'état
des lames est essentiel pour obtenir une coupe satisfaisante. La durée
de vie des lames dépend d'un certain nombre
de facteurs. Les composants du disque de coupe doivent être
remplacés chaque fois qu'ils sont endommagés.
 |
Attention |
|
Les lames sont tranchantes et
peuvent causer des blessures graves ou mortelles.
Remplacez et
nettoyez les lames avec prudence.
-
Faites tourner
le disque, afin que la tête de la vis de fixation de la lame
soit visible.
-
Retirez la
vis pour déposer la lame.
-
Montez la
nouvelle lame et serrez la vis
Remarque : Après toute intervention
sur les têtes de coupe, faites tourner chacune d'entre elles
indépendamment pour vérifier que la
rotation de l'une n'entraîne pas celle des autres.
Vue d'ensemble du remplacement
des lames
La fréquence
de remplacement des lames dépend du type de robot, de son utilisation
et du terrain sur lequel il évolue. L'état
des lames étant essentiel pour obtenir une tonte satisfaisante,
il est recommandé de les contrôler chaque semaine après
l'installation et au début de chaque
nouvelle saison de tonte.
Le pantographe permet à la
lame de suivre le relief du terrain. Si le pantographe ne fonctionne
pas correctement, les lames peuvent s'émousser
ou se rompre. Contrôlez et nettoyez régulièrement le
pantographe.
Reportez-vous à la liste
suivante pour savoir comment prolonger la vie des lames.
- Assurez-vous que le terrain est
de niveau. Si le terrain présente des bosses ou des creux prononcés,
la tête de coupe risque de ne pas
pouvoir suivre les contours du terrain les lames risquent de heurter
le sol. Essayez de niveler le terrain et, au
besoin, excluez les zones très irrégulières
de la surface de tonte.
Remarque : Des sillons peuvent se former
près de la station de charge. Il est donc recommandé de
niveler le sol près de la station ou
de poser du gazon artificiel.
- Éliminez les taupinières.
Lorsque le robots rencontre une taupinière, les lames ralentissent
et peuvent être s'arrêter. Une
fois la taupinière franchie, la lame reprend une vitesse
normale. La résistance du sol et les changements de vitesse peuvent
desserrer les vis (ou endommager le
trou de vis).
- Évitez les zones sans herbe.
La présence de zone dénudées au milieu d'une zone d'herbe
entraîne une modification de la vitesse
de rotation. Si cela se produit trop fréquemment, le
pivot et le trou de vis peuvent être endommagés. Pour éviter
ce problème, vous pouvez augmenter
la hauteur de coupe pour que le robot tonde moins d'herbe et que les
différences de vitesse soient réduites.
Vous pouvez également réensemmencer les zones
dénudées.
- Évitez de toucher les marqueurs
en nylon. Ceux-ci peuvent émousser les lames. Il est recommandé
les baisser en-dessous de la hauteur
de coupe.
- Évitez les obstacles solides
et bas dans l'herbe, Notamment arroseurs, pierres et racines. Les
pierres et autres obstacles mobiles
doivent être enlevés. Pour éviter les obstacles solides
fixes, tels les arroseurs, réglez la hauteur de coupe plus
haut que l'obstacle ou adapter la zone
de tonte pour les éviter.
Remarque : Les buts mobiles sont un autre
exemple d'obstacle solide que le robot ne peut pas détecter.
Veillez à les enlever avant de
programmer la tonte.
- Éliminez les herbes hautes
près du câble périphérique. Les plantes hautes
et résistantes peuvent émousser ou endommager la
lame. Il est donc préférable de maintenir
dégagées les zones autour des câbles périphériques.
Nettoyage
Nettoyage de la machine
Par temps humide, vous devez éviter
l'accumulation de boue et de déchets d'herbe sur les pièces
mobiles, à savoir les roues et les têtes
de coupe. Celles-ci doivent être inspectées et nettoyez
chaque jour.
-
Appuyez sur
le bouton rouge pour arrêter le robot.
-
Basculez
la machine sur l'arrière.
-
Coupez le
moteur de la machine.
-
Enlevez toute
accumulation de déchets d'herbe et de saletés à l'aide
d'un souffleur, d'air comprimé et/ou d'une brosse métallique.
-
Frottez la
carrosserie de la machine avec un chiffon doux humide ou une éponge
humide.
-
Si la carrosserie
de la machine est très encrassée, nettoyez-la avec une solution
savonneuse.
N'utilisez
jamais de solvants.
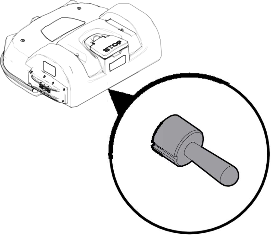
Nettoyage des contacts de charge
-
Frotter la
surface des contacts de charge avec du papier de verre (grade 280)
jusqu'à ce qu'elle semble propre.
Nettoyage du pare-chocs
-
Vérifiez
que le pare-chocs est intact. S'il présente des coupures ou des
déchirures, contactez un distributeur Toro agréé.
-
Nettoyez
le pare-chocs avec un chiffon humide.
Nettoyage des capteurs sonars
Les capteurs sonars doivent rester
propres pour fonctionner correctement. Tous les capteurs doivent fonctionner
correctement. Si l'un d'entre eux ne fonctionne
pas correctement, une alarme est émise.
-
Enlevez toute
trace de boue, les déchets d'herbe ou les saletés, et essuyez
la machine avec un chiffon humide.
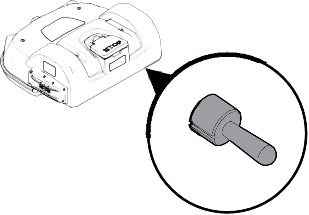
Nettoyage des roues avant
-
Enlevez toute
trace de boue et les déchets d'herbe avec une brosse métallique
ou un chiffon..
-
Vérifiez
que les roues tournent facilement et ne présentent pas un jeu
excessif. Remplacez les roues en cas de jeu est excessif.
Nettoyage de l'axe des roues avant
-
Nettoyez
l'axe des roues avant avec une brosse et/ou un chiffon.
-
Inspectez
visuellement l'axe. En cas de problème, remplacez l'axe.
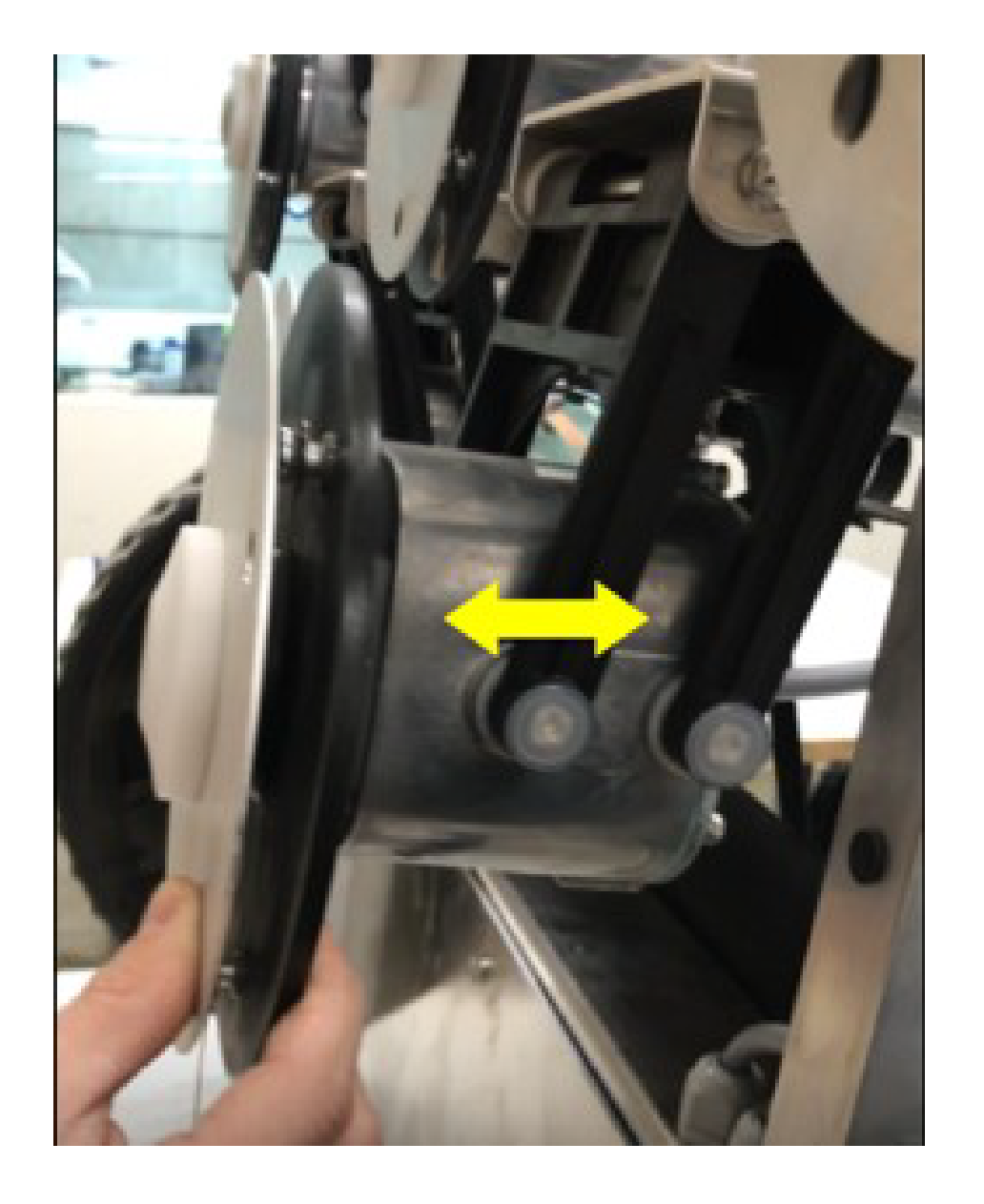
Nettoyage de la tête de coupe
-
Nettoyez
la tête de coupe à la brosse. Le nettoyage à l'air
comprimé est préférable si possible.
-
Vérifiez
que la tête de coupe entière de déplace en douceur
d'avant en arrière, comme indiqué par la flèche sur
la figure suivante.
Nettoyage du disque de coupe
Cette procédure doit être
effectuée chaque semaine. Cela est important si la hauteur de
coupe est réglée à 25 mm ou moins.
Si tel est le cas, l'usure du disque anti-friction augmente
et le disque doit alors être remplacé au moins tous les
2 mois.
-
Nettoyez
le disque de coupe à la brosse. Le nettoyage à l'air comprimé
est préférable si possible.
-
Vérifiez
que le disque de coupe tourne en douceur. En cas de problème,
remplacez les disque de coupe.
Nettoyage des roues arrière
-
Enlevez toute
trace de boue et les déchets d'herbe avec une brosse métallique.
Consignes de sécurité
concernant le système électrique
Contrôle du câblage
-
Inspectez
visuellement le câblage sous le robot. Si des problèmes
sont constatés, contactez un distributeur Toro agréé.
Entretien de la batterie
Le fonctionnement
automatique (programmé) du robot optimise la vie de la batterie.
Il est conseillé de laisser le robot gérer
ses cycles de travail. Si les cycles de travail semblent
anormalement courts, faites contrôler l'état de la batterie
par un distributeur Toro agréé.
Remarque : Il est possible de surveiller
les cycles de travail à l'aide du portail.
Glossaire
Mode limite
Lorsque le robot tond l'herbe
à la bordure de la surface de travail. Cette opération est
effectuée plusieurs fois par semaine.
Cycle
Un cycle est une session
de travail du robot. Le cycle commence lorsque le robot quitte la
station et se termine lorsque le robot retourne
à la station ou lorsqu'un problème l'interrompt.
Entité
Ensemble de robots et d'utilisateurs
opérant sur un site. Les informations sur les robots d'une entité
peuvent être consultées sur le portail
internet.
Zone de navigation par GPS
Il s'agit d'une
zone GPS RTK définie par le processus de découverte des
limites. Elle englobe toute la zone de travail. Des
sous-zones peuvent être créées en copiant et en
modifiant cette zone pour optimiser le rendement du robot.
Point GPS
Point spécifique dans
une parcelle utilisé par le robot pour retourner à une station
ou la quitter. Le point est défini pas sa latitude
et sa longitude. Le robot emprunte un itinéraire direct jusqu'à
ce point, puis suit la limite de la voie et le câble
de boucle pour retourner à la station.
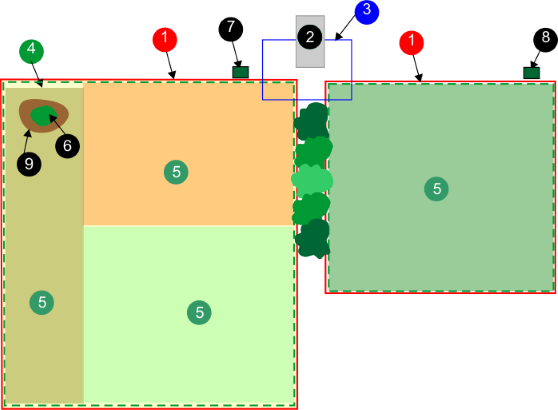
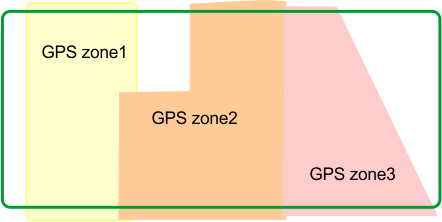
Zone GPS
Une zone GPS est définie
par un ensemble de coordonnées GPS. Elle permet de subdiviser
une parcelle câblée sans qu'il soit nécessaire
d'ajouter des câbles et des voies.
Zones GPS dans une parcelle câblée
G520046
Cela offre une flexibilité
accrue dans la définition des zones de travail car le robot peut
être programmé pour travailler de manière
optimale dans les zones.
Mode repos
Un robot passe en mode
repos si la mission en cours a été terminée en appuyant
sur le bouton d'arrêt. Par défaut, le robot
passe en veille mode après 15 minutes.
Îlot
Boucle dans le câble
périphérique spécialement installée pour empêcher
le robot de travailler à l'intérieur. Le câble périphérique
contourne l'obstacle et les câbles d'approche
et de retour sont placés l'un à côté de l'autre.
Carte
Carte des itinéraires
des robots sur le portail.
Cartographie
Informations rassemblées
par le robot à l'aide des données GPS.
Zone interdite
Les zones interdites
définies par GPS sont des régions de la surface de travail
définies par les coordonnées GPS auxquelles
le robot n'aura jamais accès durant ses états de fonctionnement
autonome. Les zones interdites définies par GPS sont utilisées
pour exclure de la zone de travail du robot des
zones qui ne peuvent pas être détectées durant la découverte
des limites. L'utilisation de zones interdites définies
par GPS permet au robot de calculer à l'avance le modèle
de tonte le plus efficace. Les zones interdites
définies par GPS sont utilisées pour exclure les obstacles,
généralement sous forme d'îlots ou de pseudo-îlots.
Obstacle
Objet sur la surface de
travail que le robot doit éviter. Les obstacles peuvent être
permanents (par ex. arbres, mobilier d'extérieur)
ou temporaires (par ex. animaux). Les obstacles sont détectés
par des capteurs. Les obstacles permanents peuvent
être évités en créant des boucles dans le câble
périphérique pour former des « îlots »
ou des « pseudo-îlots ».
Parcelle
Une zone de tonte délimitée
par le câble périphérique. Au moins une parcelle est
associée à un câble. Plusieurs parcelles
peuvent être définies.
Pourcentage
Il représente la proportion
de temps que le robot passera à travailler sur une parcelle donnée.
S'il n'y a qu'une seule parcelle, le robot y passera
100 % de son temps.
Câble périphérique
Câble
enterré sous la surface de travail qui définit la zone sur
laquelle le robot travaille. La zone définie par le câble
périphérique est appelée « parcelle ».
Pseudo-îlot
Le câble
périphérique contourne l'obstacle en maintenant une distance
spécifique entre les câbles d'approche et de retour.
États du robot
- Arrêt
Le robot a été désactivé.
- Arrêt après alarme
Le robot a été désactivé
après une alarme.
- Alarme
Le robot est en état d'alarme.
- Attente
Le robot attend à une station
de charge.
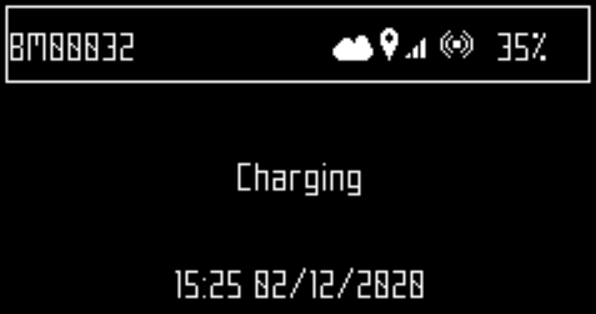
- Charge
Le robot est en train de charger
la batterie.
- En route vers la station de déchargement
Le robot se rend à la station
de dépôt pour décharger les balles. Cet état commence
lorsqu'un robot décide de retourner à
la station.
- En route vers la station de charge
Le robot se rend à la station
de charge. Cet état commence lorsque le robot décide de
retourner à la station.
- Départ de la station
Le robot quitte la station et
commence à travailler.
Zone GPS RTK
La zone de travail dans
laquelle le robot tonte selon un modèle de trajectoire. La zone
GPS RTK est définie par le robot qui fait le
tour du câble périphérique.
Site
La zone entière qui comprend
la zone de travail du robot.
Veille
Un robot passe en mode
veille 15 minutes le déclenchement d'une alarme qui n'a
pas été supprimée. Après 2 jours en mode veille,
le robot passe en mode désactivé. Cela
se produit également si le niveau de charge de la batterie est
faible. En mode veille, le robot utilise un minimum
de puissance pour réduire le risque pour la batterie.
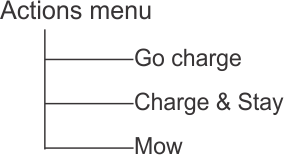
Le robot peut
quitter le veille comme suit :
- en effaçant l'alarme et en
activant le robot à l'aide du bouton sur l'écran LED
- en poussant le robot jusqu'à
la station de charge si la batterie est à plat
- en envoyant une commande de réveil
via le portail internet
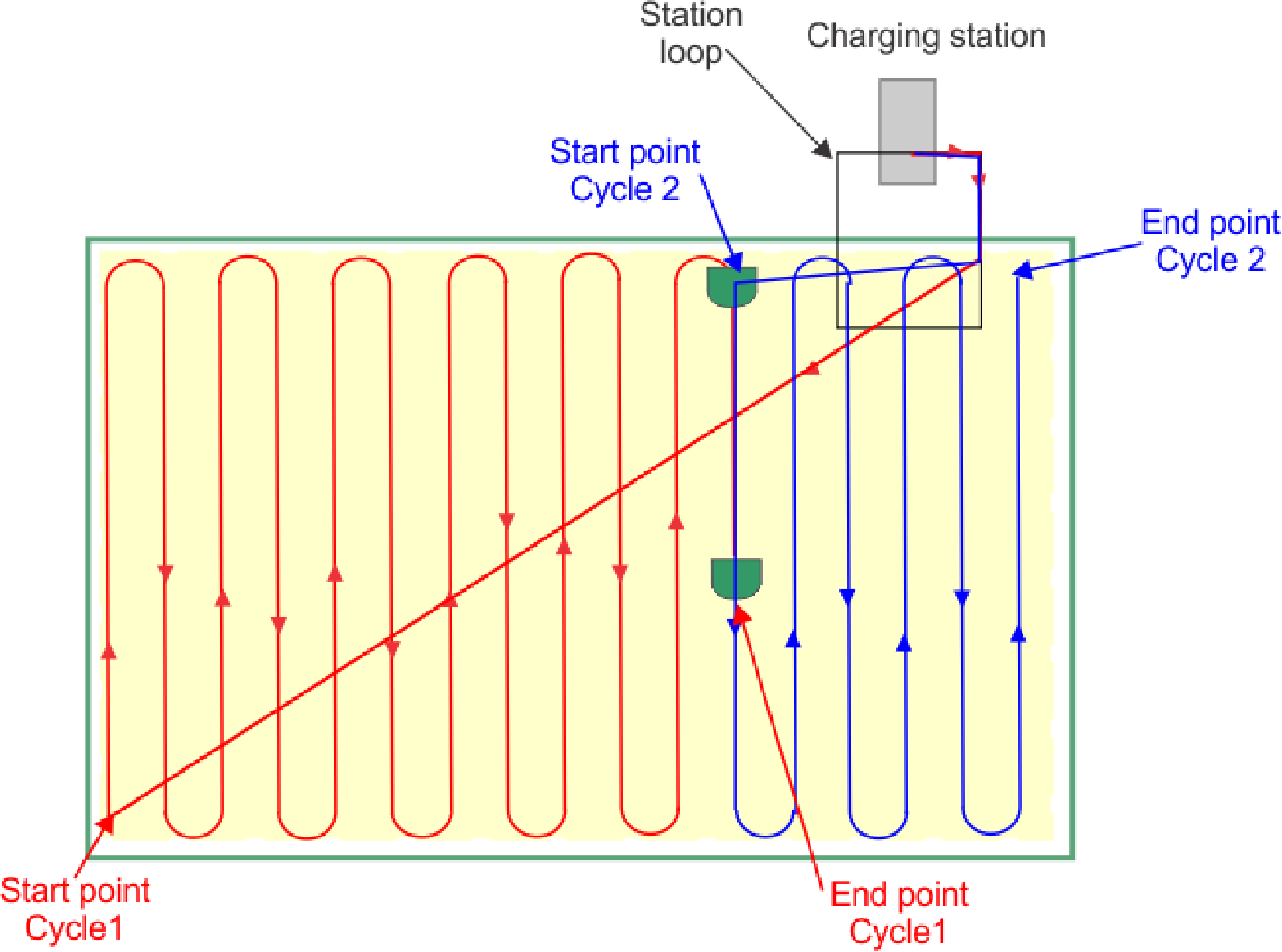
Boucle de station
Une boucle
de station est un câble court autour d'une station de charge
qui est utilisé pour guider le robot dans la station.
Lorsque le robot détecte qu'il se trouve dans la boucle
de station, il suit le câble jusqu'à ce qu'il arrive dans
la station.
Terrain
Zone d'herbe autour de
la surface de travail qui ne doit pas être tondue.
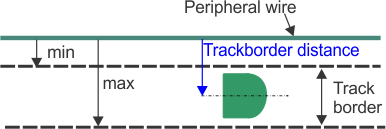
Bande limitrophe
Bande d'herbe
sur le périmètre de la parcelle dans laquelle travaille
le robot. Le robot suit la bande limitrophe lorsqu'il
quitte la station ou y retourne, sauf s'il utilise le GPS. Aucune
bande limitrophe n'est spécifiée pour un câble qui
agit comme une « boucle de retour à
la station ».
La bande limitrophe se trouve
près du câble périphérique, et est définie
par des dimensions minimales et maximales définies
par des paramètres d'installation. Elle est plus large
que le robot. La trajectoire suivie par le robot à l'intérieur
de la bande limitrophe est sélectionnée
de manière aléatoire. Cela évite au robot de suivre
la même trajectoire de manière répétée
et de créer des ornières dans la surface
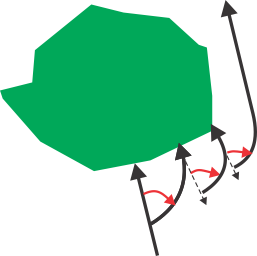
de travail. Si le robot rencontre un obstacle alors qu'il se trouve
dans la bande limitrophe, les capteurs le font reculer
et pivoter selon un angle aléatoire afin de pouvoir poursuivre
sa tâche. Cette opération peut être
répétée plusieurs fois si nécessaire.
Manœuvres pour éviter
un obstacle dans la bande limitrophe
G520315