Ürüne Genel Bakış
Turf Pro Series Robotik Çim Biçme Makinesi Ürününe
Genel Bakış
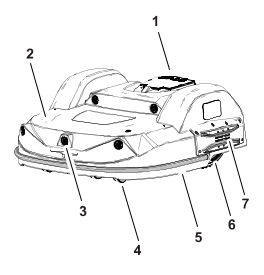
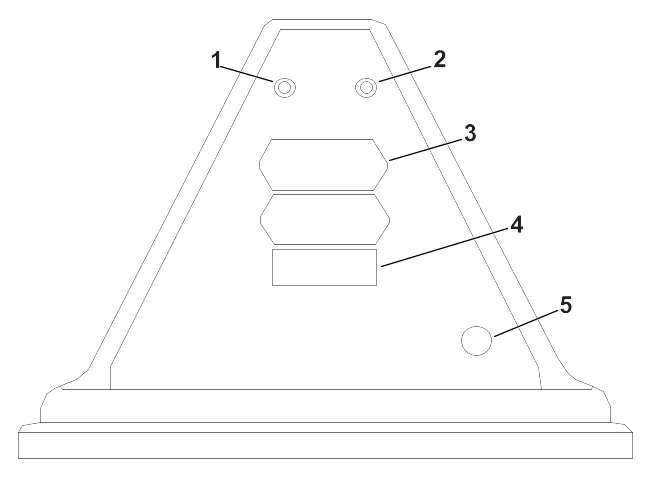
Üstten görünüm
G538206
-
Durdurma düğmesi
-
Gövde
-
Engel algılama sonarları
-
Ön tekerlekler
-
Tampon
-
Arka tekerlekler
-
Şarj temas noktaları
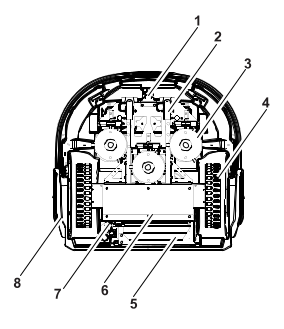
Alttan görünüm
(300 modeli)
G538280
-
Bobin
-
Ön tekerlekler
-
Kesme kafaları
-
Arka tekerlekler
-
Pil
-
Mühürlü elektronik
kutu (akıllı kutu)
-
Güç anahtarı
-
Şarj temas noktaları
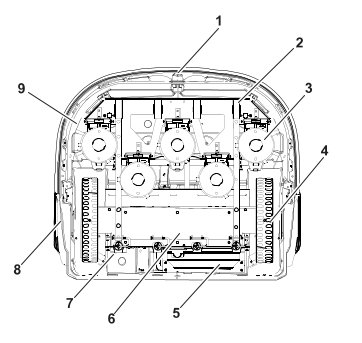
Alttan görünüm
(500 modeli)
G529049
-
Bobin
-
Ön tekerlekler
-
Kesme kafaları
-
Arka tekerlekler
-
Pil
-
Mühürlü elektronik
kutu (akıllı kutu)
-
Güç anahtarı
-
Şarj temas noktaları
-
Koruma diski
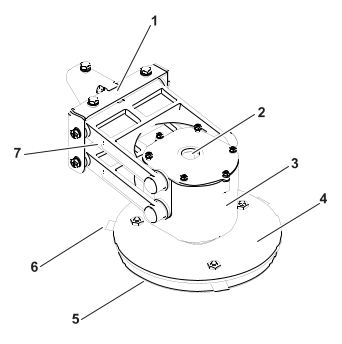
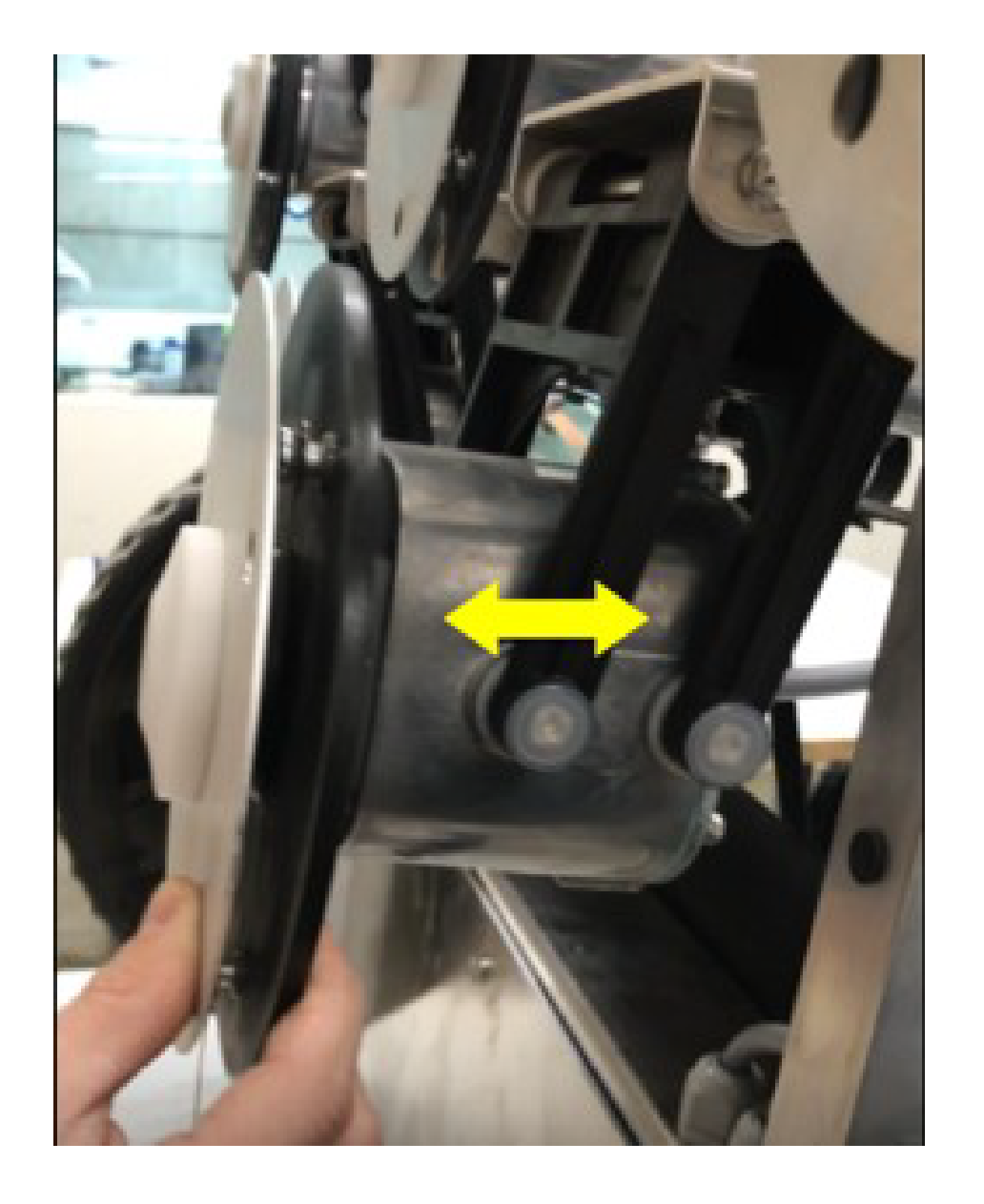
Kesme kafası
G526500
-
Destek parçası
-
Kablo girişi
-
Motor muhafazası
-
Bıçak destek diski
-
Sürtünme önleyici
disk
-
Kesme bıçağı
-
Pantograf
Not: Bıçak destek diski , sürtünme önleyici
disk
, sürtünme önleyici
disk ve kesme bıçakları
ve kesme bıçakları toplu olarak "kesme diski" olarak
adlandırılır.
toplu olarak "kesme diski" olarak
adlandırılır.
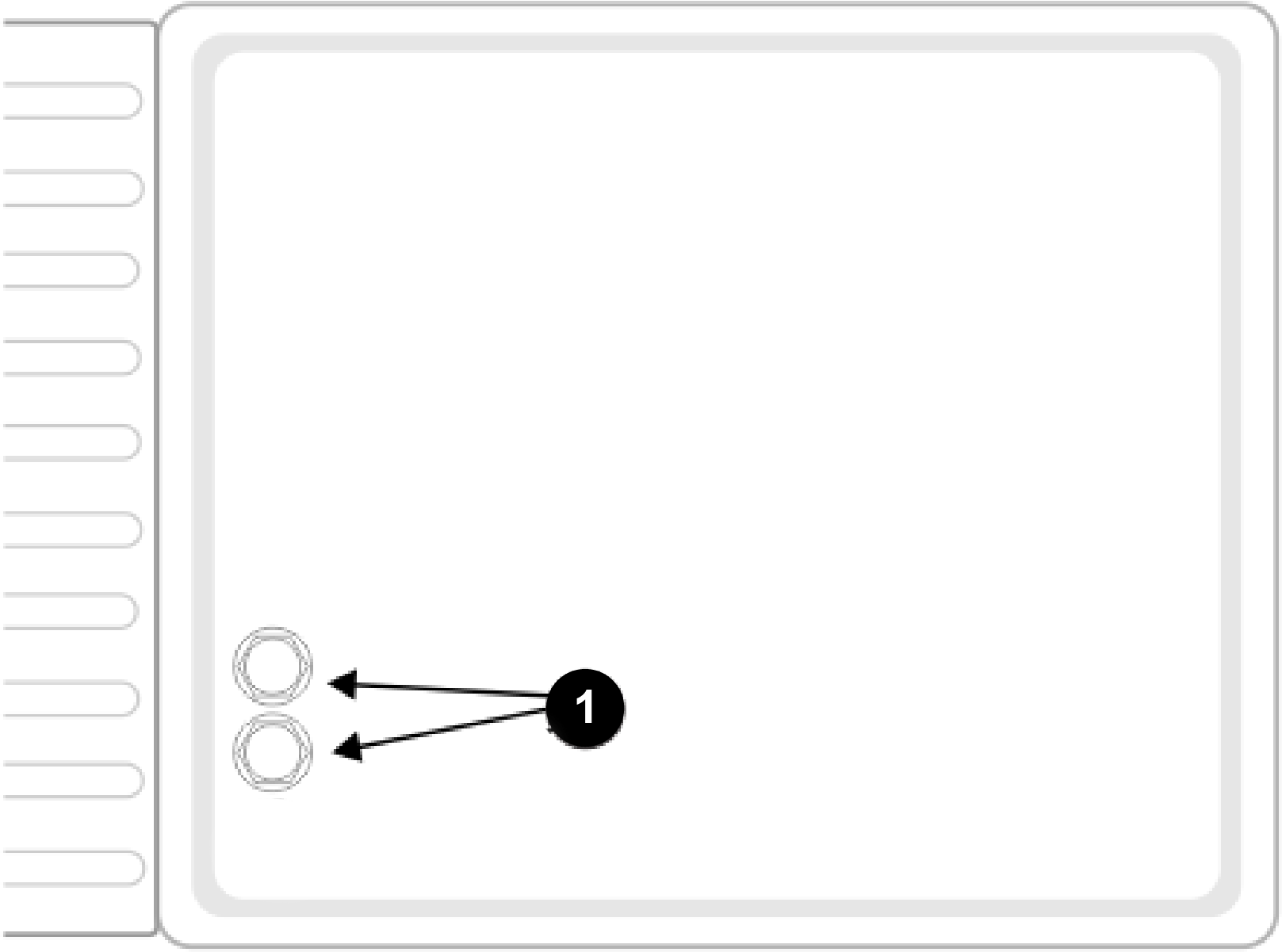
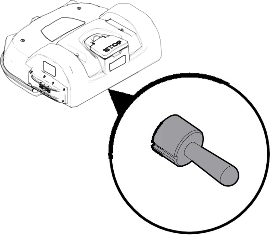
Güç anahtarı (300 modeli)
|
Güç anahtarı robotun
sol arka tarafında, gövdenin altında bulunur. Robotu çalıştırmak
için güç anahtarını sağa (AÇIK konumuna) çekin. Uzun süreli boşta durumu
için veya kış için depolama amacıyla güç
anahtarını sola (KAPALI konumuna) çekin. |
Güç anahtarı (500 modeli)
 |
Güç anahtarı robotun
sağ arka tarafında, gövdenin altında bulunur. Robotu çalıştırmak
için güç anahtarını yukarı (AÇIK konumuna) çekin. Uzun süreli boşta durumu
için veya kış için depolama amacıyla güç
anahtarını aşağı (KAPALI konumuna) çekin. |
RTK GPS anteni
G519918
Bu, gövdenin ön, orta
kısmına takılı özel bir GNSS antenidir.
Robotun genel konumu hakkında uydulardan veri almak için
kullanılır.
Seri numarası etiketi
Kimlik
etiketi aşağıda gösterildiği gibi Durdurma
düğmesi kapağının içinde bulunabilir.
G541779
-
Seri numarası etiketi
Sensöre Genel Bakış
Makinede güvenli
çalışmasını sağlayan, kapsamlı
bir sensör seti bulunmaktadır. Bu sensörler robotun
yolunda bir engel olup olmadığını
algılayabilmesini ve buna göre tepki vermesini sağlar.
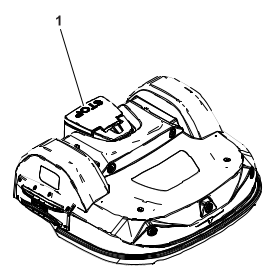
Durdurma Düğmesi
Durdurma düğmesi  robotun üzerinde olup kolayca
görülebilir. Bu düğmeye basma robotun çim
biçmeyi ve kesmeyi durdurmasına neden olacaktır.
Durdurma düğmesi kaldırıldığında
robotun kontrol kullanıcı arayüzüne erişim
sağlayan bir kapak görevi de görür. Robotu yeniden
başlatmak için bu kontrol arayüzü
kullanılarak bir komut verilmelidir.
robotun üzerinde olup kolayca
görülebilir. Bu düğmeye basma robotun çim
biçmeyi ve kesmeyi durdurmasına neden olacaktır.
Durdurma düğmesi kaldırıldığında
robotun kontrol kullanıcı arayüzüne erişim
sağlayan bir kapak görevi de görür. Robotu yeniden
başlatmak için bu kontrol arayüzü
kullanılarak bir komut verilmelidir.
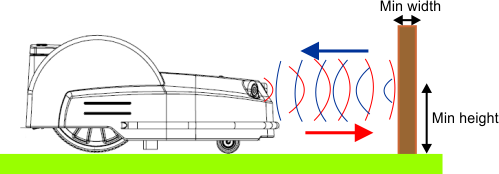
Engel Algılama Sonarları
Robotta engelleri algılamak
için bir dizi sonar sensör bulunur. Sonar algılayıcılar
bir engel algıladıklarında robot hızını
düşürecektir.
Sonar sensörler tarafından
engellerin algılanması
G525070
Görünürde
hiç engel olmadığı halde robot her zaman düşük
hızda hareket ediyorsa, bu durum sensörlerle ilgili bir
sorun olduğunu gösterir. Bu
durumda sorunu analiz etmek üzere yardım etmeleri için
servis ekibini aramanız gerekir.
Tampon
Tampon,
robot bir engele dokunduğunda algılayan bir basınç
sensörüdür. Tampon engele dokunduğunda, robot
geriye hareket eder ve sonra engelden kaçınana
kadar bir açıyla döner.
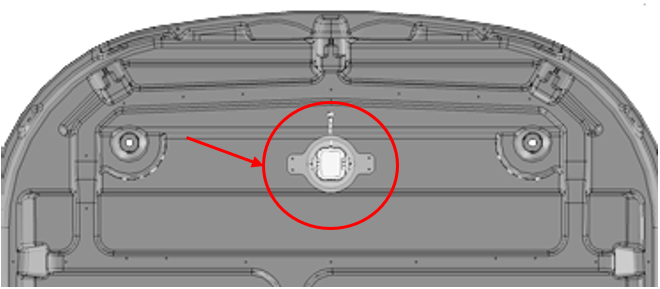
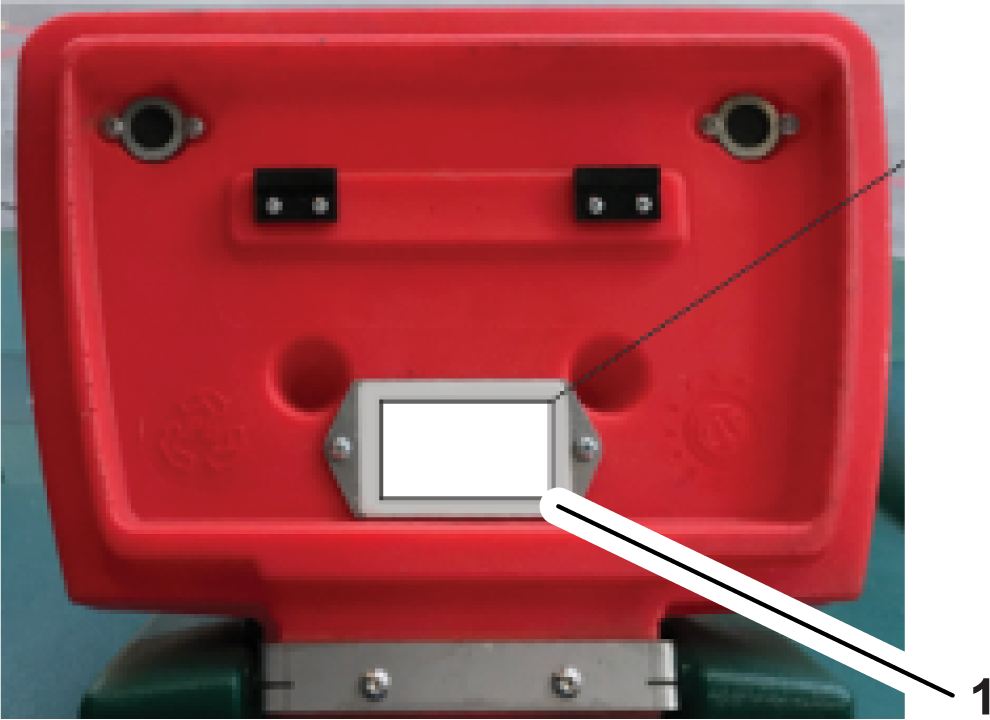
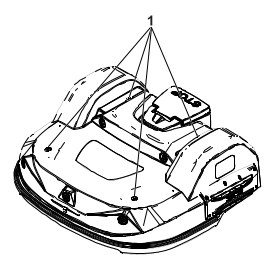
Kaldırma ve Gövde Yer Değiştirme Sensörleri
Kaldırma sensörü
eklerinin konumu
G538312
-
Kaldırma sensörü
ekleri
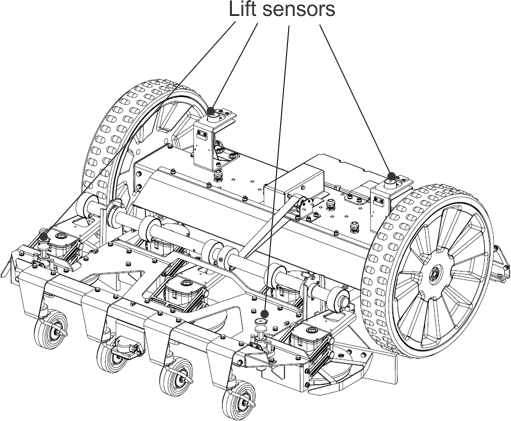
Kaldırma sensörleri
(500 serisi gösterilmektedir)
G525072
Kaldırma sensörleri
robotun gövdesine 4 noktadan takılıdır. Robot
alçak bir cisme dokunarak gövdeyi yukarı doğru
iterse veya biri robotun gövdesini
kaldırmaya çalışırsa, kaldırma
sensörleri tepki verecektir. Robot çim biçmeyi durduracak
ve geriye doğru hareket edecektir.
Bu hareket engeli robotun gövdesinden uzaklaştırırsa,
robot nesneden kaçınmak için bir manevra yapacak
ve biçmeye devam edecektir. Aksi halde,
robot 10 saniye sonra bir alarm verecektir ve engel kaldırılana
kadar güvenli modda (hareketsiz) kalacaktır.
Bobin
İndüksiyon
bobini, çevre teli içinde oluşan manyetik alanın
şiddetini algılar. Maksimum şiddet, robotun durmasına,
dönmesine ve yeni bir yönde çim
biçmeye devam etmesine neden olan telde bulunur.
Eğim Sensörü
Eğim sensörü robotun
çalıştığı yerin eğim açısını
algılar. Bir alarm verilir ve açı aşılırsa
robot çim biçmeyi durdurur.
Devrilme Sensörü
Devrilme sensörü robotun
ters dönüp dönmediğini veya robot ters haldeyken
birilerinin motoru başlatmaya çalışıp
çalışmadığını
algılar.
Sıcaklık Sensörü
Sıcaklık sensörü
ortam sıcaklığını ölçer ve
sıcaklık çok düşükse robotun çalışmasını
önler. Robotun çalışabileceği minimum
sıcaklık çalışma
parametresi olarak ayarlanır.
RTK GPS Alıcısı
Bu sensör robotun tam küresel
konumunu belirlemek için verileri uydulardan toplar.
Ek Parçalar/Aksesuarlar
Makinenin işlevlerini
geliştirmek ve çoğaltmak için makineyle birlikte
kullanılabilecek çeşitli Toro onaylı ek parça ve
aksesuarlar mevcuttur. Onaylanmış tüm ek parça
ve aksesuarların bir listesi için Yetkili Bayinize veya
Toro distribütörünüze
ulaşın ya www.Toro.com adresine gidin. Makinenin
optimum performans sergilemesi ve güvenlik sertifikasyonuna sürekli
uymasını sağlamak için sadece orijinal Toro yedek parçalarını
ve aksesuarlarını kullanın.
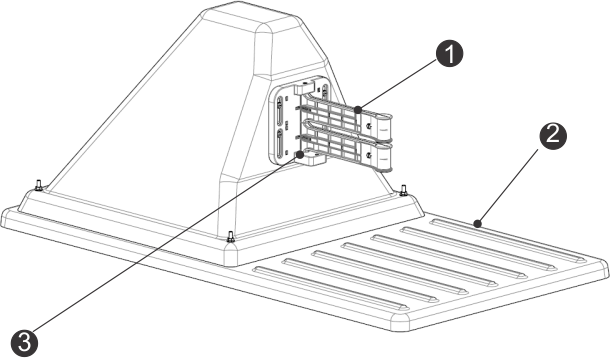
Şarj İstasyonuna Genel Bakış
Not: Model 30914EU gösterilir. Görünüm modele
göre biraz değişebilir. Daha fazla bilgi için
şarj kılavuzuna bakın.
Şarj İstasyonu Bileşenleri
G520730
- Şarj
kolları
- Taban
- Doluluk
sensörü
Şarj İstasyonunun
Arkadan Görünümü
G537669
- Za LED
göstergesi
- ZL LED
göstergesi
- Tanımlama
etiketi
- Etiket
- Güç
kablosu girişi
Şarj İstasyonunun
Alttan Görünümü
G538193
- Çevre
teli girişi
LED Göstergeler
LED göstergeler her telin
geçerli durumunu gösterir. Aşağıdaki tabloya
bakın.
| Yeşil - yanıp sönüyor |
Tel normal çalışıyordur. |
| Kırmızı - yanıp
sönüyor |
Hiç çevre teli algılanamıyordur.
Tel kesilmiş veya çok uzun olabilir.
|
| Kırmızı - sabit |
Bu, bir sorun olduğunu gösterir.
Tel çok kısa (200 metreden kısa) olabilir veya
elektronikte bir sorun olabilir.
|
LED'ler şu şekilde
etiketlenir:
- ZL: İstasyon döngüsü
bölgesi için tel
- Za: Çalışma bölgesi
A için tel
- Zb: Çalışma bölgesi
B için tel
Not: Birden fazla döngüsü olan bir şarj istasyonu
kullanıyorsanız ve döngülerden birini kullanmıyorsanız,
LED kırmızı yanıp sönecektir.
LED'in kırmızı yanıp sönmesini
durdurmak için, kart üzerinde kanalı 9'a çevirin.
Teknik Özellikler
Not: Tasarım ve teknik özellikler haber verilmeksizin değiştirilebilir.
Kapasite
| Maksimum çalışma
alanı [m2]
|
75.000 m2 |
75.000 m2 |
45.000 m2 |
| Önerilen çalışma
alanı [m2]
|
55.000 m2 |
55.000 m2 |
35.000 m2 |
| Çim biçme genişliği
[mm] |
1033 mm
|
1033 mm
|
633 mm
|
| Çalışma hızı
[km/saat] |
3,6 km/saat
|
3,6 km/saat
|
2,8 km/saat (1,7 mil/saat) |
| Maksimum eğim [%] |
%45 (24°)
|
%30 (17°)
|
%35 (19,5°)
|
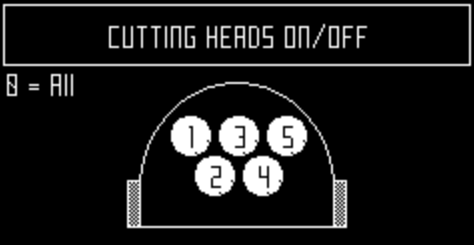
Kesme
| Kesme kafası sayısı |
5
|
3
|
| Kesme bıçağı
sayısı |
15
|
9
|
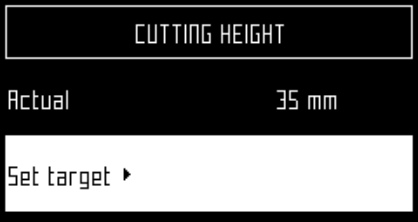
| Minimum kesim yüksekliği
(standart disk/alçak yükseklik diski)
|
20 mm / 15 mm |
20 mm / 15 mm |
| Maksimum kesim yüksekliği
(standart disk/alçak yükseklik diski)
|
100 mm / 90 mm |
100 mm / 90 mm |
| Kesme kafalarının
ayarı |
Elektronik
|
Elektronik
|
| Maksimum gürültü
düzeyi (5 m'de ölçülmüştür) |
52 db(A)
|
52 db(A)
|
Pil
| Tip
|
LIFePo4
|
LIFePo4
|
| Nominal voltaj [V] |
25,6 V
|
25,6 V
|
| Nominal kapasite [Ah] |
19,0 Ah
|
19,0 Ah
|
| Enerji [Wh]
|
486,4 Wh
|
486,4 Wh
|
| Çalışma sıcaklığı
aralığı |
-5°C ve +60°C |
-5°C ve +60°C |
| Ortalama çim biçme süresi
[dakika] |
110
|
280
|
| Ortalama tam şarj olma süresi
[dakika] |
90
|
90
|
Ağırlık ve Boyutlar
| Ağırlık [kg] |
71 kg
|
52 kg
|
| Uzunluk [mm]
|
1.110 mm
|
1.002 mm
|
| Genişlik [mm] |
1.278 mm
|
1.044 mm
|
| Yükseklik [mm] |
515 mm
|
466 mm
|
Yazılım ve İzleme
| Güvenlik PIN kodu |
Evet
|
Evet
|
| GPS konumu
|
RTK
|
RTK
|
| Sunucu ve uygulama yoluyla robot
yönetimi. |
Standart
|
Standart
|
Zeka
| Engelleri sonar algılama |
Birden Fazla
|
Birden Fazla
|
| GPS yoluyla istasyona dönme |
Evet
|
Evet
|
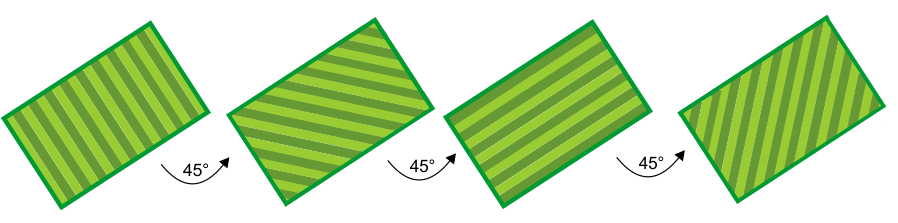
| Çim biçme tipi |
Desenli
|
Desenli
|
| Birden fazla başlama bölgesi |
Evet
|
Evet
|
| Birden fazla saha (isteğe
bağlı) |
Evet
|
Evet
|
| Birden fazla robot/istasyon |
Hayır
|
Hayır
|
| Engel algılama için
sonarlar |
5
|
5
|
| Çarpışmalar için
dirençli tampon |
1
|
1
|
| Ön kaldırma sensörleri |
2
|
2
|
| Arka kaldırma sensörleri |
2
|
2
|
| Arka çarpışma
sensörleri |
2
|
2
|
| Devrilme / eğim sensörü |
1
|
1
|
| Kesme kafası deflektörleri |
2 (her dış kafa için
1) |
Hiçbiri
|
Sözlük
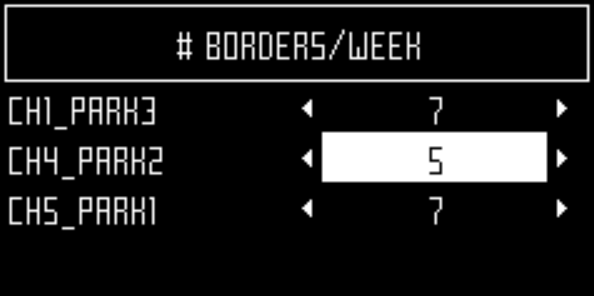
Sınır modu
Robot sahanın
en kenarındaki çimi biçtiği zaman. Bu, haftada
birkaç kez yapılmalıdır.
Döngü
Döngü,
robotun bir çalışma oturumudur. Robot istasyondan
ayrıldığında başlar ve istasyona döndüğünde
veya çalışma döngüsünü
sonlandıran bir sorun olduğunda biter.
Varlık
Bir saha içinde çalışan
robot ve kullanıcı topluluğudur. Bir varlıktaki
robot hakkındaki bilgiler web portalında görüntülenebilir.
GPS navigasyon bölgesi
Bu, sınır
keşif süreciyle tanımlanan bir RTK GPS bölgesidir.
Çalışma alanının tamamını
kapsar. Robotun verimliliğini en iyi hale
getirmek için, daha sonra bu bölge kopyalanıp düzenlenerek
alt bölgeler oluşturulabilir.
GPS noktası
Robotun bir
istasyona dönmek veya istasyondan ayrılmak için kullandığı,
bir parsel içindeki belirli bir noktadır. Nokta enlem
ve boylamına göre tanımlanır.
Robot bu noktaya doğrudan bir rota alır sonra istasyona
dönmek için izleme sınırını ve döngü
telini izler.
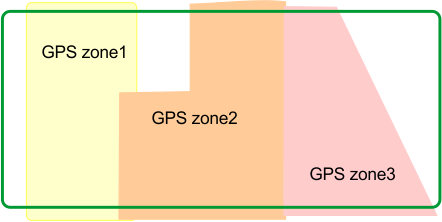
GPS bölgesi
Bir GPS bölgesi
GPS koordinatları setiyle tanımlanır. Ek teller
ve kanallar kullanılmadan tel döşeli bir parselin
alt bölümlere ayrılmasına
izin verir.
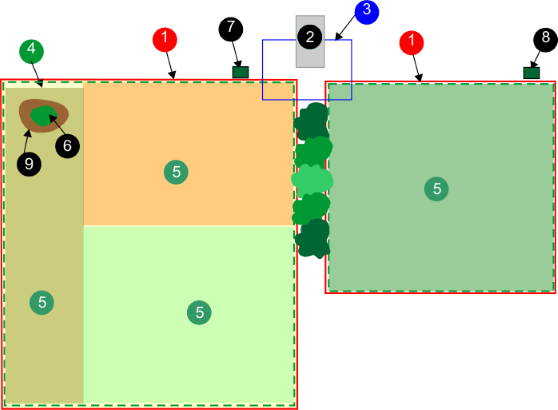
Tel döşeli bir parseldeki
GPS bölgeleri
G520046
Bu, robot, bölgelerde en
iyi verimlilikle çalışmaya programlanabildiğinden
çalışma alanlarını tanımlamada
daha büyük esneklik sağlar.
Boşta
Durdurma düğmesi
kullanılarak geçerli görev bitirildiğinde robot
boşta moduna girecektir. Varsayılan olarak robot 15 dakika
sonra uyku moduna girecektir.
Ada
Robotun içinde çalışmasını
özellikle önlemek için kurulan çevre teli içinde
bir döngüdür. Çevre teli engelin etrafından
dolandırılır ve yaklaşma
ve dönüş telleri yan yana döşenir.
Harita
Portalda robotların
rotalarının haritasıdır.
Haritalama
Robot tarafından
GPS verileri kullanılarak oluşturulan bilgi.
Girilmez bölge
GPS tanımlı
Girilmez bölgeleri GPS koordinatlarıyla tanımlanan,
otomatik çalışma durumlarından herhangi biri
sırasında robotun sahada kesinlikle
girmeyeceği bölgelerdir. GPS tanımlı Girilmez
bölgeleri, sınır keşfi sırasında
algılanamayan bölgeleri robotun çalışma
alanının dışında bırakmak için
kullanılır. GPS tanımlı Girilmez bölgelerinin
kullanımı robotun en etkili çim biçme
desenini önceden hesaplamaya izin verir. GPS tanımlı
Girilmez bölgeleri tipik olarak adalarla ve sahte adalarla yapılan
engelleri hariç tutmak için kullanılır.
Engel
Robotun sahada kaçınması
gereken bir nesnedir. Engeller kalıcı (örn. ağaçlar,
eşya) veya geçici (örn. hayvanlar) olabilir.
Nesneler sensörlerle algılanır. Kalıcı
nesnelerden "adalar" veya "sahte adalar" oluşturmak için
çevre telinde döngüler yapılarak
kaçınılabilir.
Parsel
Bir çevre teli içinde
çim biçilecek bir alan. En az bir parsel bir telle eşleştirilir.
Birçok parsel tanımlanabilir.
Yüzde
Bu, robotun belirli bir
parselde çalışarak geçireceği zaman oranını
temsil eder. Yalnızca bir parsel varsa, robot zamanının
%100'ünü orada harcar.
Çevre teli
Robotun çalışacağı
alanı tanımlayan sahanın yüzeyinin altına
döşenmiş bir teldir. Çevre teliyle tanımlanmış
alan "parsel" olarak adlandırılır.
Sahte ada
Çevre teli, yaklaşma
ve dönüş telleri arasında belirli bir mesafe
korunarak engelin etrafından dolaştırılır.
Robot durumu değerleri
- Kapalı
Robot kapatılmıştır.
- Alarmdan sonra kapalı
Robot bir alarmdan sonra kendini
kapatmıştır.
- Alarm
Robot alarm durumundadır.
- Bekliyor
Robot şarj istasyonunda
bekliyordur.
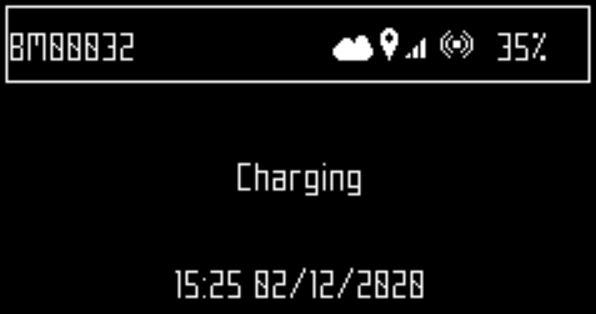
- Şarj
Robot pili şarj ediyordur.
- Boşaltma istasyonuna doğru
ilerliyor
Robot, topları
boşaltmak için boşaltma istasyonuna gidiyordur. Bu
durum bir robot istasyona dönmeye karar verdiğinde başlar.
- Şarj istasyonuna doğru
ilerliyor
Robot şarj
istasyonuna gidiyordur. Bu durum robot istasyona dönmeye karar
verdiğinde başlar.
- İstasyondan ayrılıyor
Robot istasyondan ayrılıyor
ve çalışmaya başlıyordur.
RTK GPS bölgesi
Desenli çim
biçme işlemini gerçekleştiren bir robot için
çalışma alanıdır. RTK GPS bölgesi
robotun çevre teli üzerinde bir tur yapmasıyla
tanımlanır.
Saha
Robotun çalıştığı
alanı içeren tüm alan.
Uyku
Bir alarm alınıp temizlenmediğinde
robot 15 dakika sonra uyku moduna girer. Uyku modunda 2 gün geçtikten
sonra, robot KAPALI moduna girecektir. Bu, pil şarj
seviyesi düşük bir seviyeye eriştikten sonra
da oluşacaktır. Uyku modundayken robot, pil riskini
azaltmak için minimum güç kullanır.
Robot şu
yollarla uyku modundan çıkarılabilir:
- LED ekran üzerindeki düğme
kullanılarak alarm temizlenip robot açılırsa
- pil bittiğinde robot şarj
istasyonuna itilirse
- web portalı yoluyla uzaktan
uyandırma komutu gönderilirse
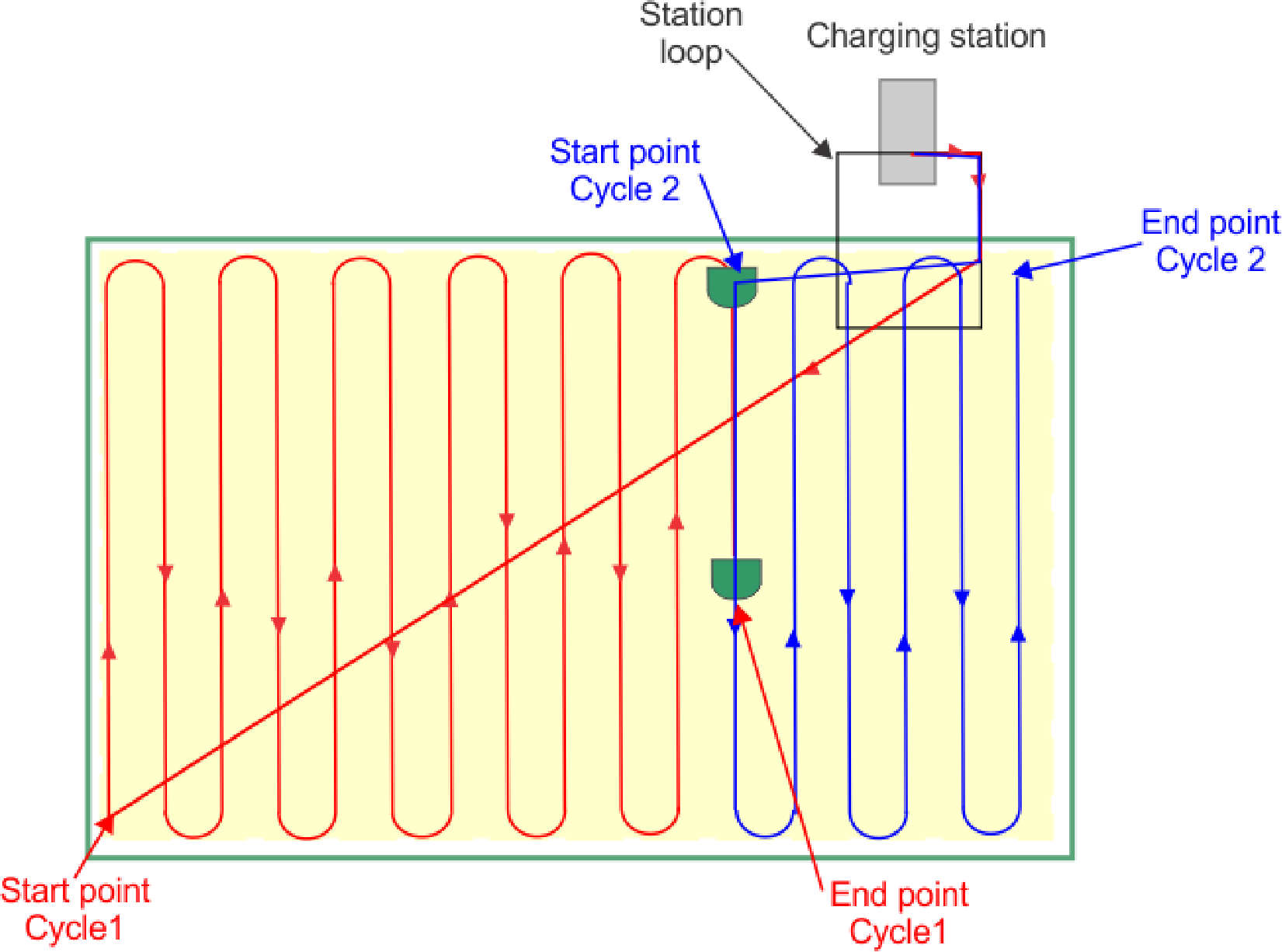
İstasyon döngüsü
Bir istasyon
döngüsü robotu istasyonun içine yönlendiren
bir şarj istasyonu çevresindeki kısa bir teldir.
Robot istasyon döngüsü içinde
olduğunu algıladığında istasyona varana
kadar teli izler.
Arazi
Sahanın etrafındaki
ve biçilmemesi gereken çim alandır.
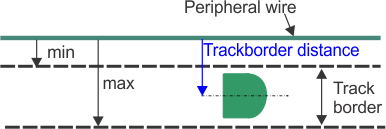
Takip sınırı
Robotun çalıştığı
parselin kenarı çevresindeki çim alanın genişliğidir.
Robot, GPS kullanmadığı sürece bir istasyondan
ayrılırken veya istasyona dönerken
takip sınırını takip eder. “İstasyona dönüş
döngüsü” görevi gören
bir tel için belirtilmiş bir takip sınırı
yoktur.
Takip sınırı
çevre telinin yanında döşenmiştir ve yükleme
parametreleri olarak ayarlanan minimum ve maksimum boyutlar ile
tanımlanır. Robottan daha geniştir.
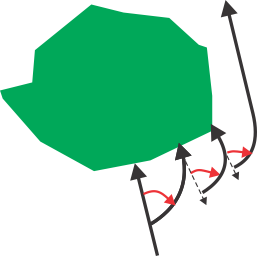
Robotun takip sınırı içinde aldığı
yol rastgele seçilir. Bu, robotun tekrar tekrar aynı
yol boyunca hareket etmemesini sağlayarak alanda
izler oluşmasını önler. Robot takip sınırındayken
bir engelle karşılaşırsa,
sensörler geri gitmesine ve sonra ilerlemek için rastgele
bir açıyla dönmesine neden olur. Bu, gerekirse birkaç
kez tekrarlanır.
Takip sınırı
içinde engellerden kaçmak için yapılacak manevralar
G520315